正运动亮相2023半导体设备材料与核心部件展示会,助力半导体产业高速高精应用

■展会名称:
第11届(2023)半导体设备材料与核心部件展示会
■展会日期
2023年8月9日-11日
■展馆地点
无锡太湖国际博览中心A6馆
■展位号
A6-A361

正运动技术,作为国内领先的运动控制企业,将于2023年8月9日参加2023半导体设备材料与核心部件展示会。展会将在无锡太湖国际博览中心举行,为半导体相关领域的用户提供了一个技术交流和经贸洽谈的友好平台。
作为展会参展商,正运动技术将展示全国产自主可控的高性能产品,包括x86平台实时Windows机器视觉EtherCAT运动控制器和跨平台实时运动控制等解决方案。这些产品广泛应用于固晶机、引线键合机、高速分选机等半导体相关设备领域,符合行业标准和实际应用需求,获得客户的高度认可。
在本次展会中,我们期待与业界专业人士和合作伙伴进行深入的技术交流和商务合作。我们将通过分享在半导体产业领域的应用经验以及优质的运动控制解决方案,与您携手助力半导体产业的持续发展,实现核心部件国产化替代。

本次展会,我们将展示多款高性能运动控制产品和运动控制解决方案
XPCIE1032H — 高性能PCIe EtherCAT实时运动控制卡

搭载Windows运动控制实时内核MotionRT7,完美解决传统PCI/PCle运动控制卡在Windows环境下控制系统的非实时性问题!
●可选6-64轴运动控制(脉冲+EtherCAT总线);
●8路高速输入,16路高速输出PSO,可满足半导体设备和分选机等多个独立通道的微秒级实时精准控制需求;
●内部搭载运动控制实时内核MotionRT7;
●多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务;
●核间交互,指令调用速度比传统的PCl/PCle快10倍,助力半导体设备高效协同工作。
半导体平移式分选机运动控制解决方案

方案采用水平机械臂配备真空吸取装置,用于吸取芯片并放置到测试工位/并行测试等任务。系统内部搭载我司高性能PCIe EtherCAT运动控制卡XPCIE1032H,可实现了多轴运动控制,以及精确控制机械臂的位置和速度,并进行高效的数据处理。
通过编码器反馈系统实时监测机械臂的位置,确保运动轨迹的精度和稳定性。同时,运动控制卡支持EtherCAT总线通信,实现整个测试过程的多轴联动和IO灵活扩展,提高了系统的整体效率和灵活性。
➩应用优势:
(1)多轴联动控制,提高分选效率;
(2)16进16出,其中8路高速输入和16路高速输出;
(3)1-16路高速输出口,可自由分配分选机所需的相机和下料装置,实现定制化的分选处理;
(4)运动控制实时内核MotionRT7,实现核间交互,指令调用速度比传统的PCl/PCle快10倍,整体设备产能可提升8%左右。
➩方案架构图:

VPLC711 — 机器视觉运动控制一体机

高性能x86平台Windows实时视觉运动控制器,开创全新智能制造!
●可选6-64轴轴运动控制(脉冲+EtherCAT总线);
●内置实时内核MotionRT7,支持第三方视觉软件;
●板载20路通用输入(其中10路为高速输入),20路高速输出;
●多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务;
●开放式IPC形态实时软控制器/软PLC,可灵活集成运动控制+视觉一体化解决方案。
半导体固晶机运动控制解决方案

方案采用XY直线运动平台、旋转摆臂轴等,以及核心控制部件,同时搭载了我司的机器视觉运动控制一体机VPLC711。
VPLC711通过与固晶机的执行机构、视觉采集硬件等部件的同步协作,能够实现高速高精的控制,确保固晶工艺中的取晶、搬运、粘接、压合、固化等关键步骤得意高速度、高精度完成。
➩应用优势:
(1)EtherCAT同步周期250us,实现多轴高速高精运动控制;
(2)力矩控制功能,控制吸放芯片的下压力度,防止芯片压坏变形;
(3)可通过EtherCAT进行灵活扩展,实现多轴联动,多工位协同,提升生产效率;
(4)系统结构紧凑,接线便捷,安全可靠;
(5)运动控制实时内核MotionRT7,实现核间交互,指令调用速度比传统的PCl/PCle快10倍,整体设备产能可提升10%左右。
➩方案架构图:

在本次展会中,我们诚邀各位领导莅临A6-A361展位参观与指导。在展会现场,您将有机会与我们的专业服务团队近距离交流和互动,我们将共同探讨半导体产业未来的发展趋势和新的市场增长点!
正运动技术始终以客户应用需求为中心,不断优化和完善产品与服务,为客户提供易用、高性价比、可靠的运动控制解决方案,以满足各类运动控制应用场景的需求,助力智能制造设备向高端化迈进。
相关文章:
正运动亮相2023半导体设备材料与核心部件展示会,助力半导体产业高速高精应用
■展会名称: 第11届(2023)半导体设备材料与核心部件展示会 ■展会日期 2023年8月9日-11日 ■展馆地点 无锡太湖国际博览中心A6馆 ■展位号 A6-A361 正运动技术,作为国内领先的运动控制企业,将于2023年8月9日参加…...

如何在MongoDB中添加新用户
如何在MongoDB中添加新用户? MongoDB是一款流行的NoSQL数据库,它的可扩展性强,可进行分布式部署,且具有高可用性。其许多优势使得越来越多的企业和组织选择MongoDB作为其数据库系统。本文将介绍如何在MongoDB中添加新用户。 第一步…...
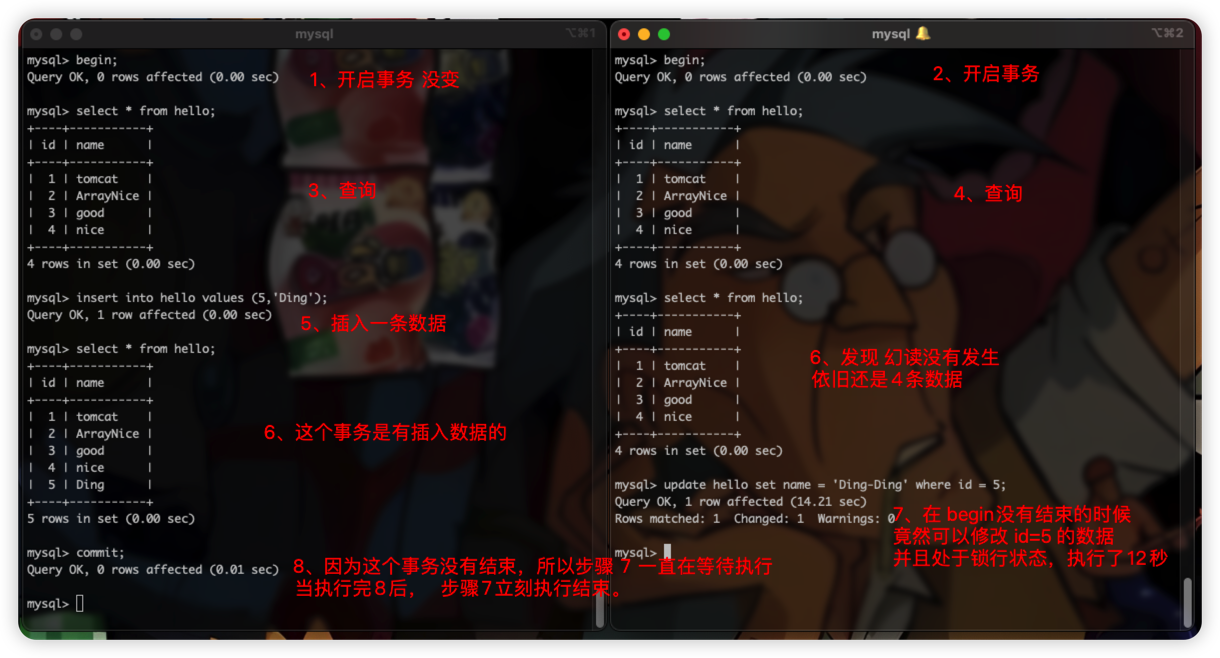
幻读怎么复现
大家好,我是想想。 很久没有给大家分享技术了,主要在计划一些事情,几乎没什么时间爽文了。 今天从实操上实现了MySQL事务隔离复现问题,就记录分享给大家吧。 正文 我们知道,著名的四大事务特性ACID特性 Atomicity…...
无脑入门pytorch系列(二)—— torch.mean
本系列教程适用于没有任何pytorch的同学(简单的python语法还是要的),从代码的表层出发挖掘代码的深层含义,理解具体的意思和内涵。pytorch的很多函数看着非常简单,但是其中包含了很多内容,不了解其中的意思…...

ansible-kubeadm在线安装高可用K8S集群v1.19-v1.20版本
ansible可以安装的KS8版本如下: 请按照此博客中的内容操作后,才可以通过下面的命令查询到版本。 [rootk8s-master01 ~]# yum list kubectl --showduplicates | sort -r kubectl.x86_64 1.20.0-0 kubern…...

Cesium entity 渐隐渐显、闪烁
点entity function f2(){var x1;var flogtrue;//闪烁//var x0;var flogfalse;//渐显viewer.entities.add({name:"圆点point闪烁",position:Cesium.Cartesian3.fromDegrees(116.200.03,39.530.03,0),point : {show : true, // defaultcolor :new Cesium.CallbackProp…...
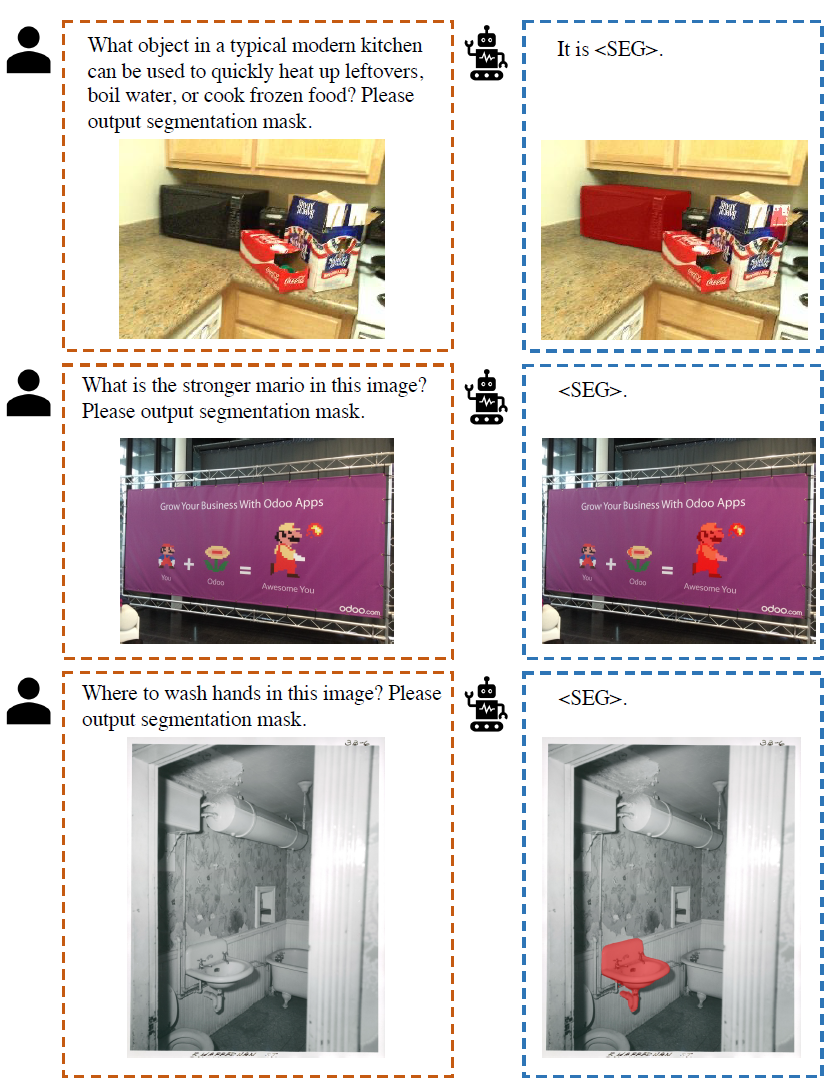
LISA:通过大语言模型进行推理分割
论文:https://arxiv.org/pdf/2308.00692 代码:GitHub - dvlab-research/LISA 摘要 尽管感知系统近年来取得了显著的进步,但在执行视觉识别任务之前,它们仍然依赖于明确的人类指令来识别目标物体或类别。这样的系统缺乏主动推理…...
opencv基础40-礼帽运算(原始图像减去其开运算)cv2.MORPH_TOPHAT
礼帽运算是用原始图像减去其开运算图像的操作。礼帽运算能够获取图像的噪声信息,或者得到比原始图像的边缘更亮的边缘信息。 例如,图 8-22 是一个礼帽运算示例,其中: 左图是原始图像。中间的图是开运算图像。右图是原始图像减开运…...
函数)
php中的array_filter()函数
php中的array_filter()函数用于筛选数组中的元素,并返回一个新的数组,新数组的元素是所有返回值为true的原数组元素。 array_filter()函数的使用语法如下: array_filter ( array $array [, callable $callback [, int $flag 0 ]] ) : array…...
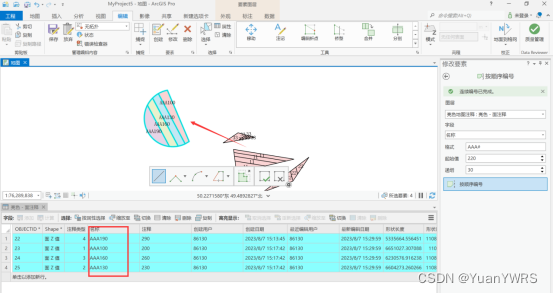
ArcGIS Pro基础:【按顺序编号】工具实现属性字段的编号自动赋值
本次介绍一个字段的自动排序编号赋值工具,基于arcgis 的字段计算器工具也可以实现类似功能,但是需要自己写一段代码实现, 相对而言不是很方便。 如下所示,该工具就是【编辑】下的【属性】下的【按顺序编号】工具。 其操作方法是…...
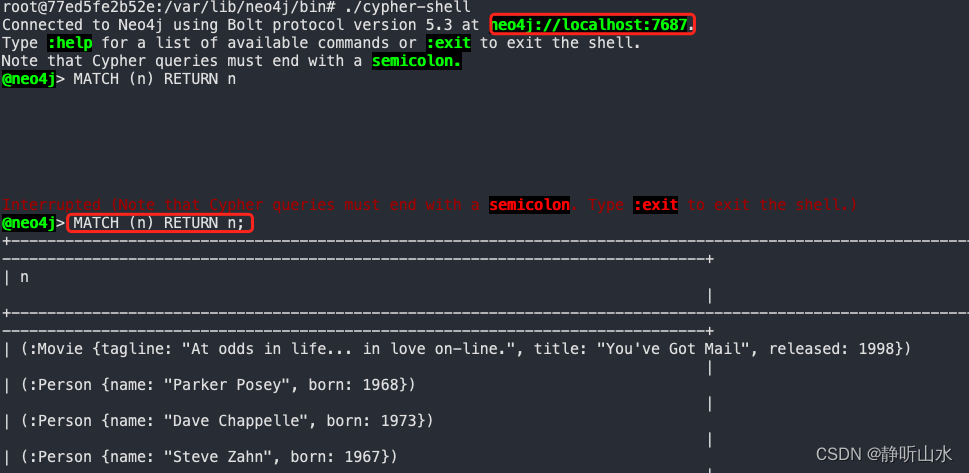
neo4j终端操作
1】进入容器 (base) xiaokkkxiaokkkdeMacBook-Pro ~ % docker exec -it 77ed5fe2b52e /bin/bash 2】启动、停止neo4j root77ed5fe2b52e:/var/lib/neo4j/bin# ./neo4j start Neo4j is already running (pid:7). Run with --verbose for a more detailed error message.root7…...
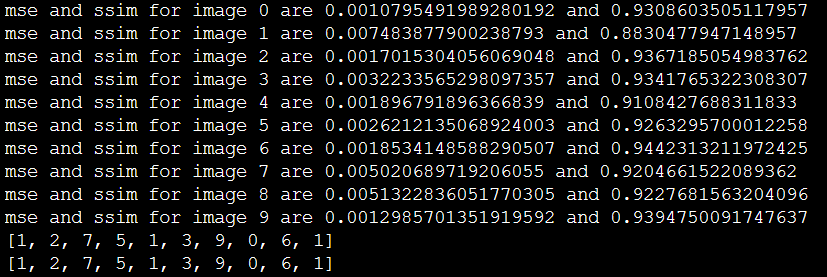
【深度学习】在 MNIST实现自动编码器实践教程
一、说明 自动编码器是一种无监督学习的神经网络模型,主要用于降维或特征提取。常见的自动编码器包括基本的单层自动编码器、深度自动编码器、卷积自动编码器和变分自动编码器等。 其中,基本的单层自动编码器由一个编码器和一个解码器组成,编…...
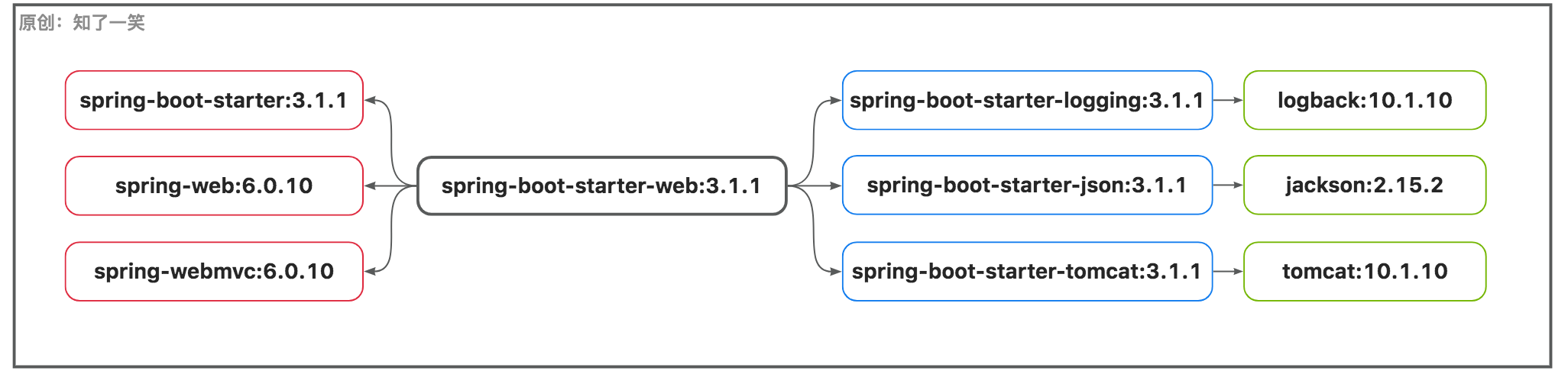
SpringBoot3基础用法
技术和工具「!喜新厌旧」 一、背景 最近在一个轻量级的服务中,尝试了最新的技术和工具选型; 即SpringBoot3,JDK17,IDEA2023,Navicat16,虽然新的技术和工具都更加强大和高效,但是适应采坑的过程…...

6、移除链表元素
方法1:原链表删除元素 伪代码: 首先判断头节点是否是待删除元素。(头节点和其他节点的删除方法不一样) while(head ! null && head->value target) //如果链表为 1 1 1 1 1,要删除元素1时用if就会失效 {h…...
大厂容器云实践之路(一)
1-华为CCE容器云实践 华为企业云 | CCE容器引擎实践 ——从IaaS到PaaS到容器集群 容器部署时代的来临 IaaS服务如日中天 2014-2015年,大家都在安逸的使用IaaS服务; 亚马逊AWS的部署能力方面比所有竞争对手…...
《合成孔径雷达成像算法与实现》Figure3.1
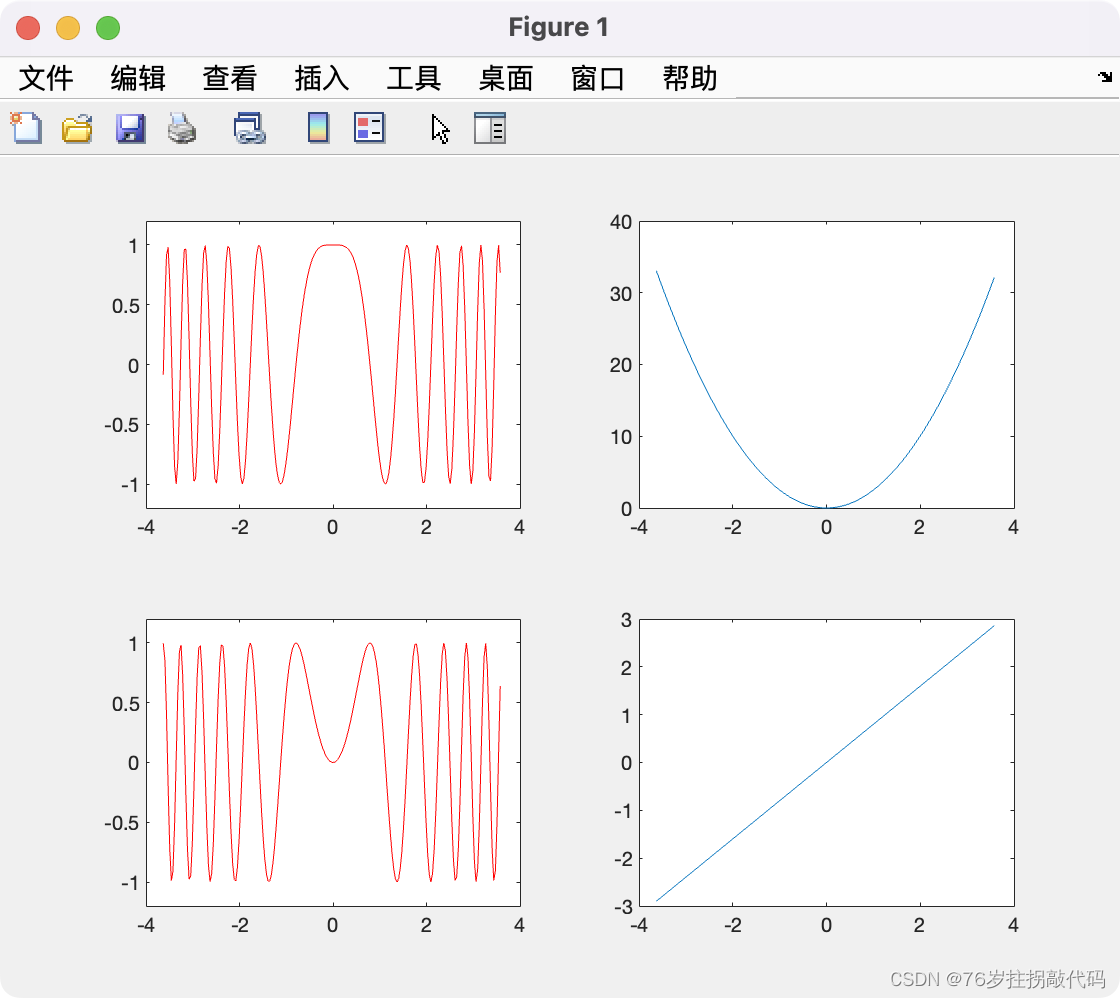
代码复现如下: clc close all clear all%参数设置 B 5.80e6; %信号带宽 T 7.26e-6; %脉冲持续时间 K B/T; %线性调频频率 alpha 5; %过采样率 F alpha*B; %采样频率 N F*T; %采样点数 dt T/N; …...
代码随想录算法训练营day60
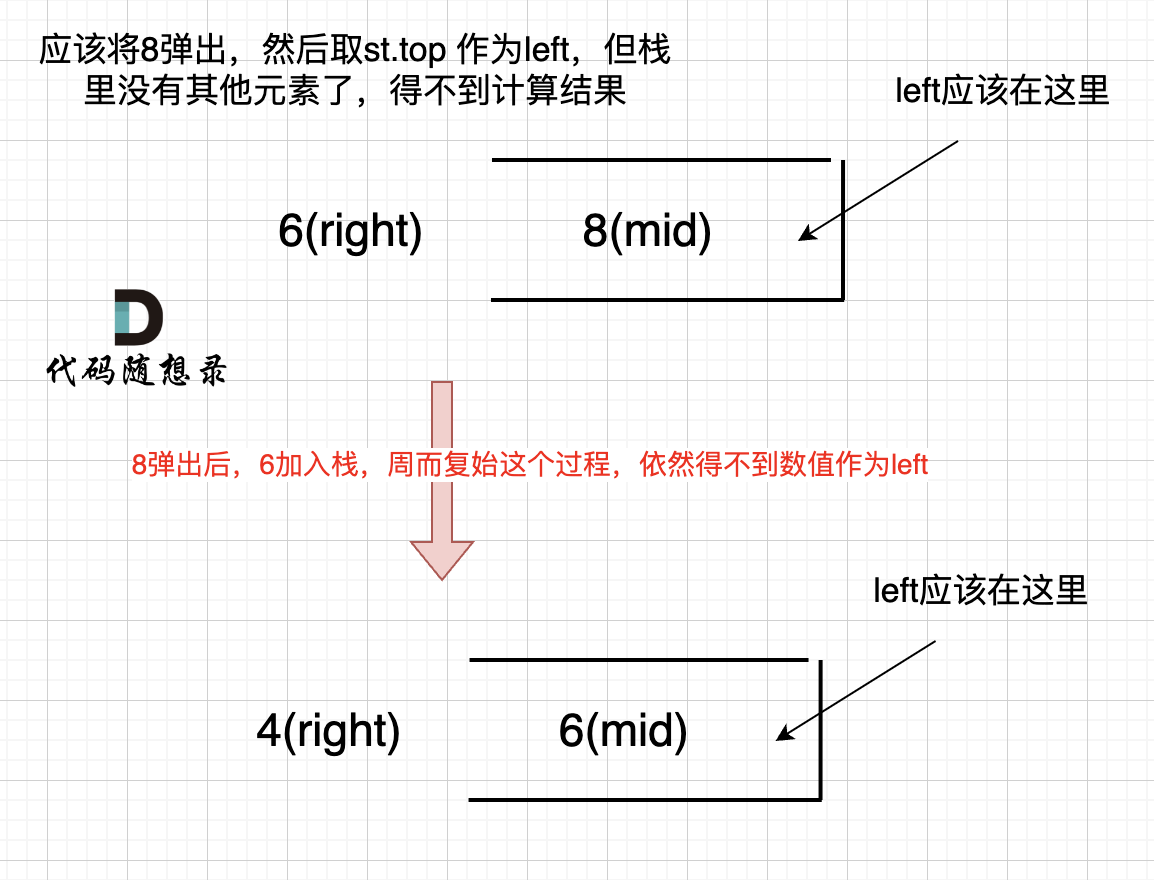
文章目录 Day60 柱状图中最大的矩形题目思路代码 Day60 柱状图中最大的矩形 84. 柱状图中最大的矩形 - 力扣(LeetCode) 题目 给定 n 个非负整数,用来表示柱状图中各个柱子的高度。每个柱子彼此相邻,且宽度为 1 。 求在该柱状图…...
Modbus TCP转Profibus DP网关modbus tcp报文解析
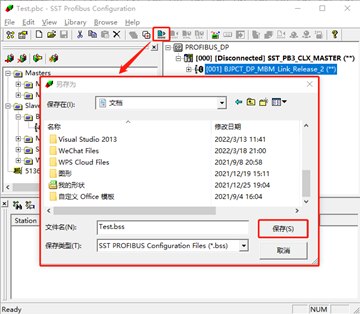
捷米JM-DPM-TCP网关。在Profibus总线侧作为主站,在以太网侧作为ModbusTcp服务器功能, 下面是介绍捷米JM-DPM-TCP主站网关组态工具的配置方法 2, Profibus主站组态工具安装 执行资料光盘中的安装文件setup64.exe或setup.exe安装组态工具。安装过程中一直…...

对 Promise 的理解
Promise 是异步编程的一种解决方案,它是一个对象,可以获取异步 操作的消息,他的出现大大改善了异步编程的困境,避免了地狱回调, 它比传统的解决方案回调函数和事件更合理和更强大。 所谓 Promise,简单说就…...

Vuex:Vue.js应用程序的状态管理模式
介绍 在Vue.js应用程序中,随着项目复杂度的增加,组件之间的数据共享和管理变得困难。为了解决这个问题,Vue.js提供了一个名为Vuex的状态管理模式。Vuex可以帮助我们更有效地组织、管理和共享应用程序的状态。 什么是Vuex? Vuex…...

Lyrebird常见问题排查手册:解决无法启动和音频延迟的终极方案
Lyrebird常见问题排查手册:解决无法启动和音频延迟的终极方案 【免费下载链接】lyrebird 🦜 Simple and powerful voice changer for Linux, written with Python & GTK 项目地址: https://gitcode.com/gh_mirrors/lyr/lyrebird Lyrebird是一…...

OpenRGB终极指南:一站式免费控制所有RGB设备的完整解决方案
OpenRGB终极指南:一站式免费控制所有RGB设备的完整解决方案 【免费下载链接】OpenRGB Open source RGB lighting control that doesnt depend on manufacturer software. Supports Windows, Linux, MacOS. Mirror of https://gitlab.com/CalcProgrammer1/OpenRGB. R…...

手机上的Linux:用Termux 0.118.0打造Python 3.10.4爬虫环境,实测下载‘拷贝漫画’全流程
在安卓手机上构建Python爬虫环境:Termux实战指南 你是否遇到过这样的场景:在地铁上突然想到一个绝妙的爬虫点子,但手边只有一部手机?或者想在平板上直接下载漫画却苦于没有合适的工具?Termux正是解决这些痛点的神器。这…...

037、LVGL动画类型与参数配置
LVGL动画类型与参数配置 上周帮一个做智能家居面板的客户调试,遇到个挺典型的坑:他用了lv_anim_set_path_cb()自定义了一个缓动曲线,结果动画跑起来像抽风一样忽快忽慢。我让他把回调函数贴出来一看——好家伙,路径函数里直接调了lv_anim_set_time()改时长。这种在动画执行…...
背锅了!TongWeb7/6负载均衡后获取真实IP的两种实战方案)
别再让request.getRemoteAddr()背锅了!TongWeb7/6负载均衡后获取真实IP的两种实战方案
负载均衡环境下TongWeb获取真实客户端IP的工程实践 在分布式架构盛行的今天,负载均衡已成为高可用系统的标配组件。但当流量经过多层代理后,后端服务获取的客户端IP往往会"失真"——这不仅是TongWeb特有的问题,而是所有Java Web容…...

Halcon实战:高效遍历指定文件夹图像文件的两种核心方案
1. 工业视觉项目中的图像读取痛点 在工业视觉检测项目中,我们经常需要处理大量存储在本地文件夹中的图像文件。这些文件可能来自产线相机拍摄的产品照片、X光检测图像或是其他光学设备生成的图片。实际项目中,图像文件的命名往往不规范,格式…...

AutoGen框架解析:多智能体协作如何重塑AI应用开发范式
1. 项目概述:当AI学会“开会”,AutoGen如何重塑智能体协作范式 如果你和我一样,在过去几年里深度参与过AI应用开发,尤其是基于大语言模型的智能体构建,那你一定体会过那种“保姆式”的疲惫感。为了让一个智能体完成稍微…...

横向评测:东莞主流 AI 培训公司核心能力对比
引言在当今数字化时代,AI 技术正以前所未有的速度改变着各行各业。东莞作为制造业名城,众多企业和创业者迫切需要掌握 AI 技术以实现数字化转型和轻创业。然而,目前东莞的 AI 培训市场面临着诸多挑战,如培训内容与本地行业需求脱节…...

自托管项目管理与知识库系统:基于文件存储的轻量级解决方案
1. 项目概述与核心价值最近在折腾个人知识库和项目管理工具,发现很多现成的方案要么太重,要么太轻,要么就是配置起来让人头大。直到我遇到了一个叫bicodeurubu/pm-wiki-v2的项目,它给我的第一印象是“清爽”。这其实是一个基于现代…...
)
助睿实验作业1:订单利润分流数据加工(零代码 ETL 完整流程)
前言 本文是我在完成 助睿数智(Uniplore)一站式数据科学实验平台 入门实验时的完整学习笔记。实验任务是将订单明细表与产品信息表关联,并根据利润正负将数据分流为盈利订单和亏损订单,最终输出到两个 Excel 文件中。全程使用零代…...