Python-OpenCV中的图像处理-图像轮廓
Python-OpenCV中的图像处理-图像轮廓
- 轮廓
- 什么是轮廓
- 查找轮廓
- 绘制轮廓
- 轮廓特征
- 图像的矩
- 轮廓面积
- 轮廓周长(弧长)
- 轮廓近似
- 凸包
- 凸性检测
- 边界矩形
- 直边界矩形
- 旋转边界矩形(最小面积矩形)
- 最小外接圆
- 最小外接三角
- 椭圆拟合
- 直线拟合
- 轮廓的性质
- 长宽比
- 轮廓面积与边界矩形面积的比(Extent)
- 轮廓面积与凸包面积的比(Solidity)
- 与轮廓面积相等的圆形的直径(Equivalent Diameter)
- 轮廓对象的方向
- 轮廓的掩模和像素点
- 最大值和最小值及它们的位置
- 平均颜色及平均灰度
- 对象轮廓的极点
- 轮廓的凸缺陷
- 点到轮廓的最短距离
- 形状匹配
- 轮廓的层次结构
轮廓
什么是轮廓
轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度。轮廓在形状分析和物体的检测和识别中很有用。
- 为了更加准确,要使用二值化图像。在寻找轮廓之前,要进行阈值化处理或者 Canny 边界检测。
- 查找轮廓的函数会修改原始图像。如果你在找到轮廓之后还想使用原始图像的话,你应该将原始图像存储到其他变量中。
- 在 OpenCV 中,查找轮廓就像在黑色背景中超白色物体。你应该记住,要找的物体应该是白色而背景应该是黑色。
查找轮廓
函数 cv2.findContours() 有三个参数,第一个是输入图像,第二个是轮廓检索模式,第三个是轮廓近似方法。返回值有三个,第一个是图像,第二个是轮廓,第三个是(轮廓的)层析结构。轮廓(第二个返回值)是一个 Python列表,其中存储这图像中的所有轮廓。每一个轮廓都是一个 Numpy 数组,包含对象边界点( x, y)的坐标。
ret, thresh = cv2.threshold(imgray, 127, 255, 0)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
cv2.CHAIN_APPROX_NONE:储存所有的边界点(点数很多)
cv2.CHAIN_APPROX_SIMPLE:储存所有的近似直线点(点数很少)
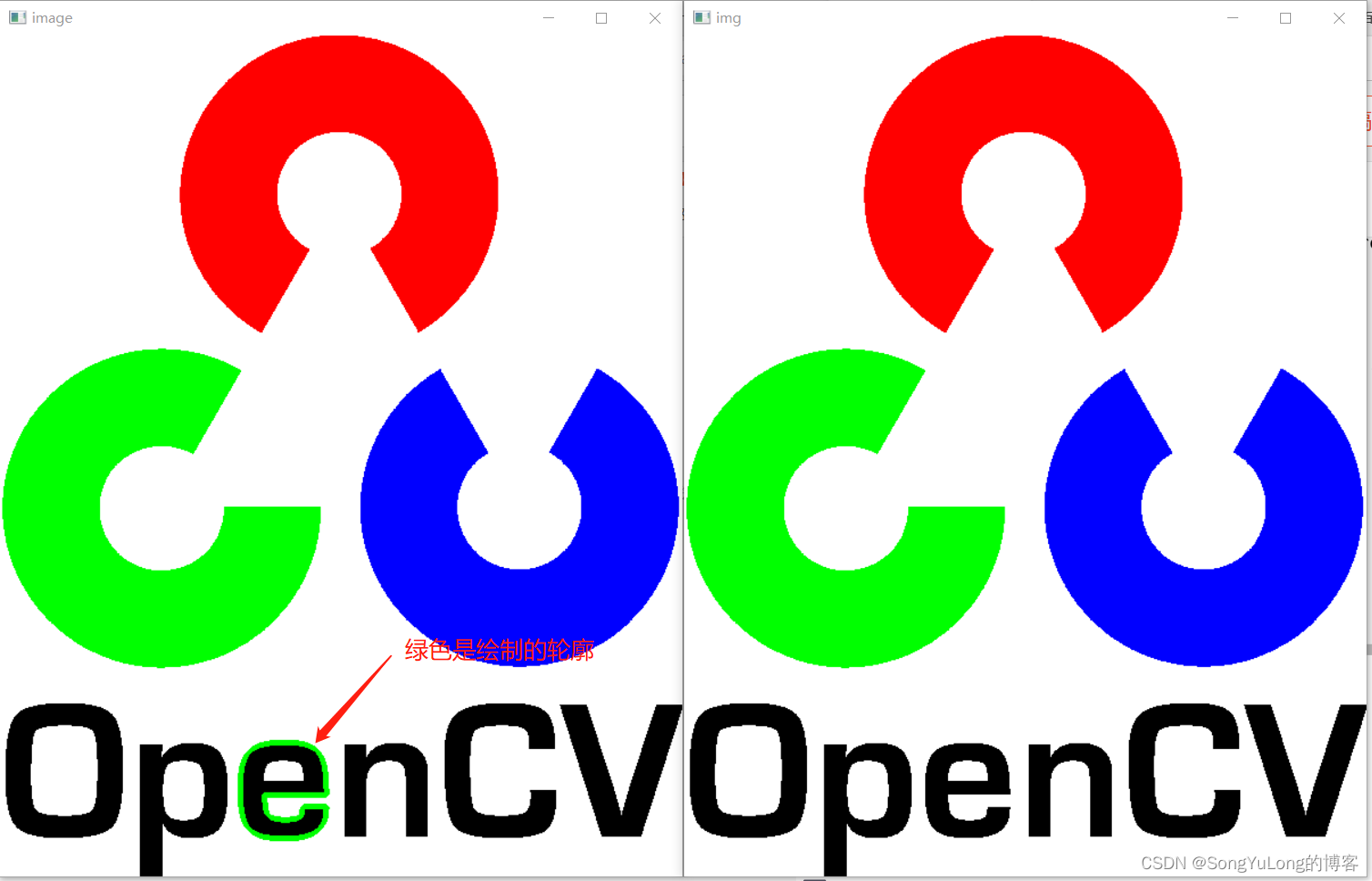
绘制轮廓
函数 cv2.drawContours() 可以被用来绘制轮廓。它可以根据你提供的边界点绘制任何形状。它的第一个参数是原始图像,第二个参数是轮廓,一个 Python 列表。第三个参数是轮廓的索引(在绘制独立轮廓是很有用,当设置为 -1 时绘制所有轮廓)。接下来的参数是轮廓的颜色和厚度等。
- 绘制所有轮廓 image = cv2.drawContours(img, contours, -1, (0, 255, 0), 3)
- 绘制指定轮廓 image = cv2.drawContours(img, contours, 0, (0, 255, 0), 3)
import numpy as np
import cv2# 轮廓:连着边界连续的点连在一起的曲线,具有相同的颜色或者灰度。
# 轮廓在形状分析和物体的检测和识别中很有用。# 1.为了准确,要使用二值化图像。需要进行阀值化处理或Canny边界检测。
# 2.查找轮廓的函数会修改元素图像。
# 3.在OpenCV中,查找轮廓就像在黑色背景中找白色物体。# cv2.findContours() # 查找轮廓
# cv2.drawContours() # 绘制轮廓img = cv2.imread('./resource/image/opencv-logo2.png')
imgcp = cv2.imread('./resource/image/opencv-logo2.png')
imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)ret, thresh = cv2.threshold(imgray, 127, 255, 0)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# contours 轮廓
# hierarchy 层次# image = cv2.drawContours(img, contours, -1, (0, 255, 0), 3) # 绘制所有轮廓
image = cv2.drawContours(img, contours, 3, (0, 255, 0), 3) # 绘制第4个轮廓
print(cv2.getVersionString())
print(type(contours))
print(len(contours))
cv2.imshow('img', imgcp)
cv2.imshow('image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
轮廓特征
- 查找轮廓的不同特征:矩、面积、周长(也叫弧长)、重心、边界框等
图像的矩
- 在图像处理、计算机视觉和相关领域,图像矩是图像像素强度的某个特定的加权平均值(矩),或者是这种矩的函数,通常被选择为具有某种吸引人的特性或解释。图像矩在分割后对描述物体很有用。通过图像矩找到的图像的简单属性包括面积(或总强度)、其中心点和关于其方向的信息。
- 图像的矩可以帮助我们计算图像的质心,面积等。
- 函数cv2.moments()计算得到矩,返回一个字典。
根据矩值可以计算对象的重心:
C x = M 10 M 00 , C y = M 01 M 00 C_x=\frac{M_{10}}{M_{00}},C_y=\frac{M_{01}}{M_{00}} Cx=M00M10,Cy=M00M01
import numpy as np
import cv2
from matplotlib import pyplot as plt# 矩:图像的矩可以帮助我们计算图像的质心,面积等
# cv2.moments() 计算得到矩,以一个字典形式返回# 读取图像
img = cv2.imread('./resource/opencv/image/box2.png', cv2.IMREAD_COLOR)
img1 = img.copy()
gray = cv2.imread('./resource/opencv/image/box2.png', cv2.IMREAD_GRAYSCALE)# 阀值处理
(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)# 查找所有轮廓
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
print('找到轮廓数:',len(contours))# 计算轮廓索引为0的图像矩
cnt = contours[0]
M = cv2.moments(cnt)
print('moments()计数结果M:',M)# 计算重心(质点)
#根据这些矩值计算出对象的重心:
# Cx = M10/M00
# Cy = M01/M00
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
print(cx,cy)# 绘制轮廓
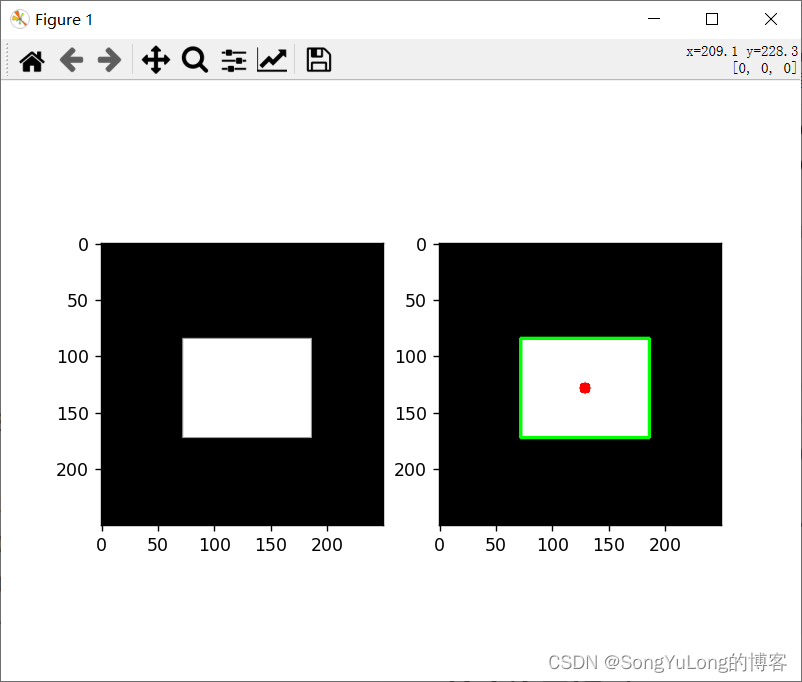
cv2.drawContours(img1, contours, 0, (0, 255, 0), 2)# 绘制质点
cv2.circle(img1, (cx, cy), 5, (255, 0, 0), -1)plt.subplot(121), plt.imshow(img)
plt.subplot(122), plt.imshow(img1)
plt.show()
程序运行结果:
找到轮廓数: 1
moments()计数结果M: {‘m00’: 10032.0, ‘m10’: 1294128.0, ‘m01’: 1284096.0, ‘m20’: 177807168.0, ‘m11’: 165648384.0, ‘m02’: 170838272.0, ‘m30’: 25740205920.0, ‘m21’: 22759317504.0, ‘m12’: 22038137088.0, ‘m03’: 23524638720.0, ‘mu20’: 10864656.0, ‘mu11’: 0.0, ‘mu02’: 6473984.0, ‘mu30’: 0.0, ‘mu21’: 0.0, ‘mu12’: 0.0, ‘mu03’: 0.0, ‘nu20’: 0.10795454545454546, ‘nu11’: 0.0, ‘nu02’: 0.06432748538011696, ‘nu30’: 0.0, ‘nu21’: 0.0, ‘nu12’: 0.0, ‘nu03’: 0.0}
质点: 129 128
下图红色圆点是质点,绿色框是轮廓:
轮廓面积
- 轮廓的面积可以使用函数 cv2.contourArea() 计算得到,也可以使用矩
( 0 阶矩), M[‘m00’]。 - area = cv2.contourArea(cnt)
import numpy as np
import cv2
from matplotlib import pyplot as pltimg = cv2.imread('./resource/opencv/image/box2.png', cv2.IMREAD_COLOR)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)cnt = contours[0]
M = cv2.moments(cnt)
area = cv2.contourArea(cnt)
print(cnt)
print(area)
print(M['m00'])
[[[ 72 84]]
[[ 72 172]]
[[186 172]]
[[186 84]]]
10032.0
10032.0
轮廓周长(弧长)
- 也被称为弧长。可以使用函数 cv2.arcLength() 计算得到。这个函数的第二参数可以用来指定对象的形状是闭合的( True),还是打开的(一条曲线)。
- perimeter = cv2.arcLength(cnt,True)
import numpy as np
import cv2img = cv2.imread('./resource/opencv/image/box2.png', cv2.IMREAD_COLOR)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)# 第一个参数轮廓,第二次参数形状闭合的(True),还是打开的一条曲线
perimeter = cv2.arcLength(contours[0], True)
print(perimeter) #404.0
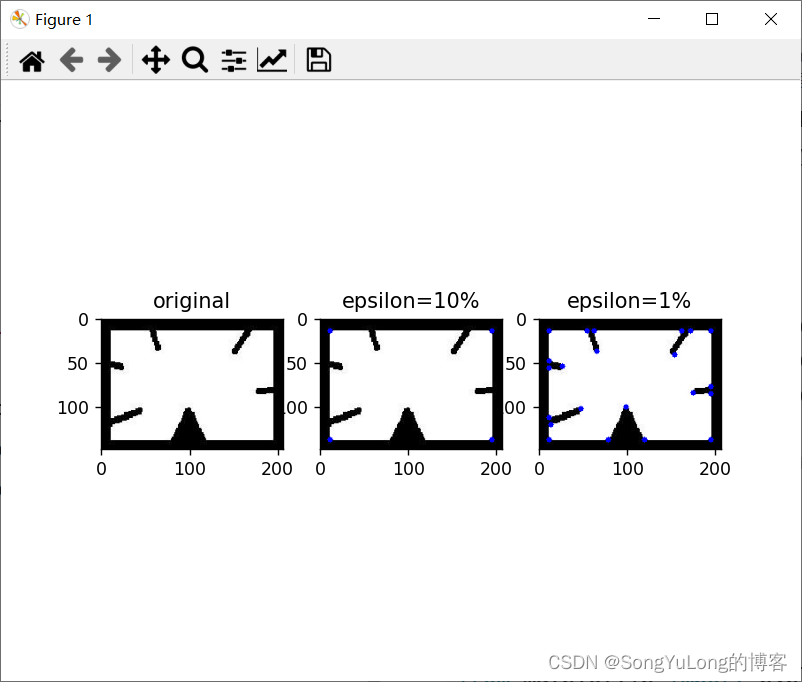
轮廓近似
- 将轮廓形状近似到另外一种由更少点组成的轮廓形状,新轮廓的点的数目由我们设定的准确度来决定。使用的Douglas-Peucker算法,维基百科获得更多此算法的细节。
- 假设要在一幅图像中查找一个矩形,但是由于图像的种种原因,我们不能得到一个完美的矩形,而是一个“坏形状”。现在你就可以使用这个函数来近似这个形状()了。
- epsilon = 0.1*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)
import numpy as np
import cv2
from matplotlib import pyplot as pltimg = cv2.imread('./resource/opencv/image/approx2.jpg', cv2.IMREAD_COLOR)
img_draw1 = img.copy()
img_draw2 = img.copy()gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)# epsilon=10%
epsilon01 = 0.1 * cv2.arcLength(contours[0], True)
# epsilon=1%
epsilon001 = 0.01 * cv2.arcLength(contours[0], True)
approx_01 = cv2.approxPolyDP(contours[0], epsilon01, True)
approx_001 = cv2.approxPolyDP(contours[0], epsilon001, True)cv2.drawContours(img_draw1, approx_01, -1, (0, 0, 255), 5)
cv2.drawContours(img_draw2, approx_001, -1, (0, 0, 255), 5)plt.subplot(131), plt.imshow(img), plt.title('original')
plt.subplot(132), plt.imshow(img_draw1), plt.title('epsilon=10%')
plt.subplot(133), plt.imshow(img_draw2), plt.title('epsilon=1%')
plt.show()
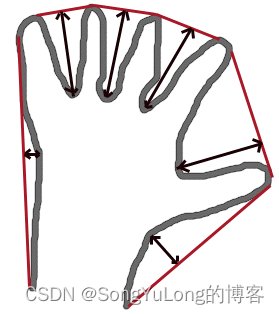
凸包
- 凸包与轮廓近似相似,但不同,虽然有些情况下它们给出的结果是一样的。
- 函数 cv2.convexHull() 可以用来检测一个曲线是否具有凸性缺陷,并能纠正缺陷。
hull = cv2.convexHull(points[, hull[, clockwise[, returnPoints]])
参数:
points:传入的轮廓
hull:输出,通常不需要
clockwise:方向标志,True:输出的凸包是顺时针方向,False:逆时针方向。
returnPoints:默认值为True:返回凸包上点的坐标。False:返回与凸包点对应的轮廓上的点。 - 获取凸包:hull = cv2.convexHull(cnt)
- 一般来说,凸性曲线总是凸出来的,至少是平的。如果有地方凹进去了就被叫做凸性缺陷。例如下图中的手。红色曲线显示了手的凸包,凸性缺陷被双箭头标出来了。
凸性检测
- cv2.isContourConvex() 可以可以用来检测一个曲线是不是凸
的。它只能返回 True 或 False。k = cv2.isContourConvex(cnt)
import numpy as np
import cv2
from matplotlib import pyplot as plt# img = cv2.imread('./resource/opencv/image/Back_Projection_Theory2.jpg')
img = cv2.imread('./resource/opencv/image/shape.jpg')gray = cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY)# 二值化
(ret, thresh) = cv2.threshold(gray, 120, 255, cv2.THRESH_BINARY)
# (ret, thresh) = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
# thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 5, 2)# 查找轮廓
(contours, his) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)hull_img = img.copy()
for i in range(len(contours)):hull = cv2.convexHull(contours[i])isConvex = cv2.isContourConvex(contours[i])print(hull)print(isConvex)# 绘制凸包cv2.drawContours(hull_img, hull, -1, (0, 255, 0), 2)# 绘制轮廓
contours = cv2.drawContours(img.copy(), contours, -1, (255, 0, 0), 2)plt.subplot(231), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)), plt.title('img'), plt.xticks([]), plt.yticks([])
plt.subplot(232), plt.imshow(cv2.cvtColor(gray, cv2.COLOR_BGR2RGB)), plt.title('gray'), plt.xticks([]), plt.yticks([])
plt.subplot(233), plt.imshow(cv2.cvtColor(thresh, cv2.COLOR_BGR2RGB)), plt.title('thresh'), plt.xticks([]), plt.yticks([])
plt.subplot(234), plt.imshow(cv2.cvtColor(contours, cv2.COLOR_BGR2RGB)), plt.title('contours'), plt.xticks([]), plt.yticks([])
plt.subplot(235), plt.imshow(cv2.cvtColor(hull_img, cv2.COLOR_BGR2RGB)), plt.title('convex'), plt.xticks([]), plt.yticks([])
plt.show()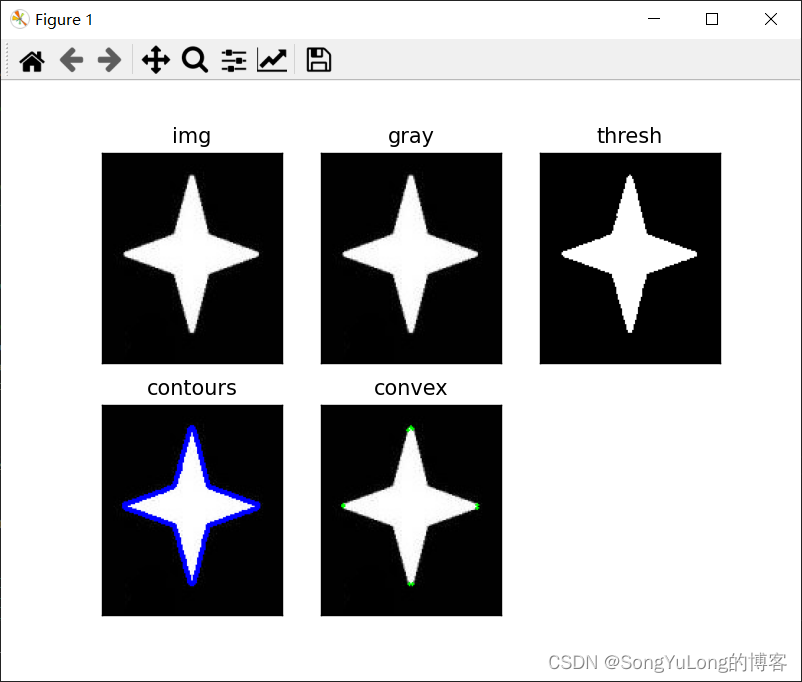
边界矩形
边界矩形有两类:
- 直边界矩形
- 旋转边界矩形
直边界矩形
- 直边界矩形:一个直矩形(就是没有旋转的矩形)。它不会考虑对象是否旋转。所以边界矩形的面积不是最小的。可以使用函数
- cv2.boundingRect() 函数获取直边界矩形。( x, y)为矩形左上角的坐标,( w, h)是矩形的宽和高。
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
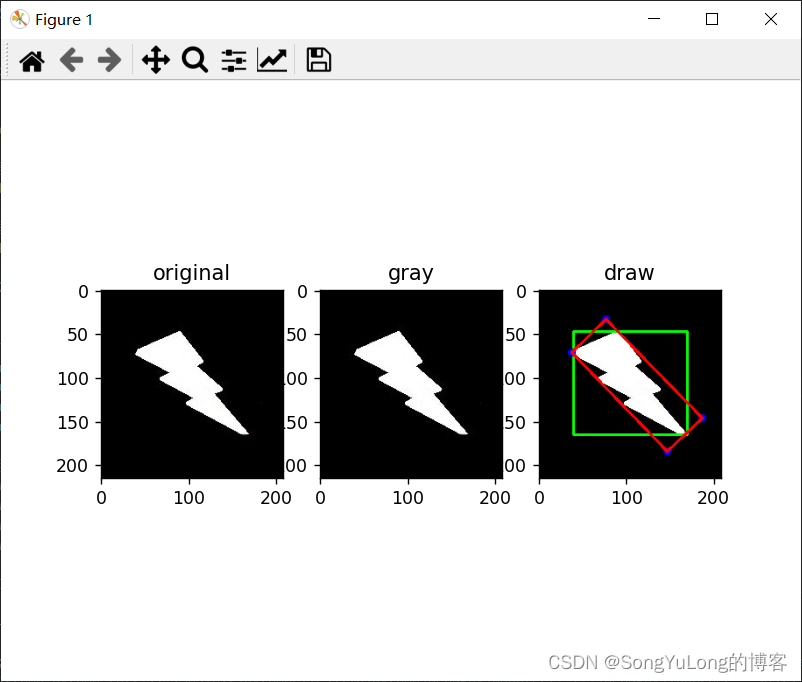
旋转边界矩形(最小面积矩形)
- 旋转的边界矩形:这个边界矩形是面积最小的,因为它考虑了对象的旋转。
- cv2.minAreaRect()函数获取旋转边界矩形。返回的是一个 Box2D 结构,其中包含矩形中心点坐标( x, y),矩形的宽和高( w, h),以及旋转角度。
(center(x,y), (width, height), angle of rotation) = cv2.minAreaRect(points) - cv2.boxPoints() 函数获取旋转边界矩形的 4 个角点。
[[x1, y1],[x2, y2], [x3, y3], [x4, y4]] = cv2.boxPoints(points)
import numpy as np
import cv2
from matplotlib import pyplot as plt# 轮廓边界矩形 分为两种:直边界矩形、旋转边界矩形# 读取图像
img = cv2.imread('./resource/opencv/image/boundrect.jpg', cv2.IMREAD_COLOR)
draw = img.copy()# 转为灰度并二值化处理
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)# 获取直边界矩形
x,y,w,h = cv2.boundingRect(contours[0])
print(x,y,w,h)
# 绘制直边界矩形
draw = cv2.rectangle(draw, (x, y), (x+w, y+h), (0, 255, 0), 2)# 获取旋转边界矩形 获取Box2D结构 (center(x,y), (width, height), angle of rotation)
box2d = cv2.minAreaRect(contours[0])
print(box2d)
# 获取Box2D矩形4个角点坐标,[[x1, y1],[x2, y2], [x3, y3], [x4, y4]]
boxpoints = cv2.boxPoints(box2d)
print(boxpoints)
boxpoints = np.int32(boxpoints)
print(boxpoints[0])# 画 旋转边界矩形4个角点
draw = cv2.circle(draw, tuple(boxpoints[0]) , 3, (255, 0, 0), 2)
draw = cv2.circle(draw, tuple(boxpoints[1]) , 3, (255, 0, 0), 2)
draw = cv2.circle(draw, tuple(boxpoints[2]) , 3, (255, 0, 0), 2)
draw = cv2.circle(draw, tuple(boxpoints[3]) , 3, (255, 0, 0), 2)# 画 旋转边界矩形 矩形框
draw = cv2.line(draw, tuple(boxpoints[0]), tuple(boxpoints[1]), (0, 0, 255), 2)
draw = cv2.line(draw, tuple(boxpoints[1]), tuple(boxpoints[2]), (0, 0, 255), 2)
draw = cv2.line(draw, tuple(boxpoints[2]), tuple(boxpoints[3]), (0, 0, 255), 2)
draw = cv2.line(draw, tuple(boxpoints[3]), tuple(boxpoints[0]), (0, 0, 255), 2)plt.subplot(131), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)), plt.title('original')
plt.subplot(132), plt.imshow(cv2.cvtColor(gray, cv2.COLOR_BGR2RGB)), plt.title('gray')
plt.subplot(133), plt.imshow(cv2.cvtColor(draw, cv2.COLOR_BGR2RGB)), plt.title('draw')
plt.show()
下图"draw"标题的图片绿色矩形是轮廓的直边界矩形,红色矩形是轮廓的旋转边界矩形(最小面积矩形),蓝色的4个点是旋转边界矩形的四个角点:
最小外接圆
- 能包括对象所有的圆中面积最小的一个。
- cv2.minEnclosingCircle() 获取最小外接圆
(x,y),radius = cv2.minEnclosingCircle(cnt)
import numpy as np
import cv2
from matplotlib import pyplot as plt# 读取图像
img = cv2.imread('./resource/opencv/image/boundrect.jpg', cv2.IMREAD_COLOR)# 转为灰度并二值化
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)# 查找对象轮廓
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)# 根据轮廓查找对象最小外接圆
(x,y), radius = cv2.minEnclosingCircle(contours[0])
print((x,y), radius)# 画 对象最小外接圆
img = cv2.circle(img, (int(x), int(y)), int(radius), (0, 0, 255), 1)# 显示图像
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()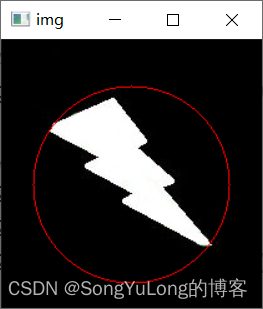
最小外接三角
- 能包括对象所有的三角形中面积最小的一个。
- cv2.minEnclosingTriangle():返回 area, [[[x1, y1]],[[x2, y2]], [[x3, y3]]]
area, triangle = cv2.minEnclosingTriangle(points)
import numpy as np
import cv2# 读取图像
img = cv2.imread('./resource/opencv/image/boundrect.jpg', cv2.IMREAD_COLOR)# 转为灰度并做二值化处理
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)# 查找轮廓
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)# 根据轮廓获取对象的最小外接三角, area, [[[x1, y1]],[[x2, y2]], [[x3, y3]]]
area, triangle = cv2.minEnclosingTriangle(contours[0])
print(area)
print(triangle)# 最小外接三角的3个角点坐标转为整型(获取到的是浮点型,不能用于图形绘制)
triangle = np.int32(triangle)
print(triangle[0][0])
print(triangle[1][0])
print(triangle[2][0])# 绘制最小外接三角
img = cv2.line(img, tuple(triangle[0][0]), tuple(triangle[1][0]), (0, 0, 255), 2)
img = cv2.line(img, tuple(triangle[1][0]), tuple(triangle[2][0]), (0, 0, 255), 2)
img = cv2.line(img, tuple(triangle[2][0]), tuple(triangle[0][0]), (0, 0, 255), 2)# 显示图像
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()

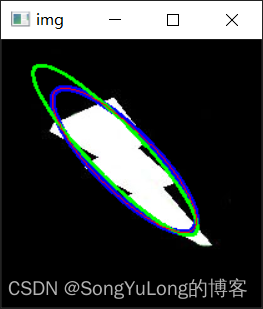
椭圆拟合
- cv2.ellipse(),返回值其实就是旋转边界矩形的内切圆
import numpy as np
import cv2img = cv2.imread('./resource/opencv/image/boundrect.jpg', cv2.IMREAD_COLOR)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)(contuors, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)ellipse1 = cv2.fitEllipse(contuors[0])
ellipse2 = cv2.fitEllipseAMS(contuors[0])
ellipse3 = cv2.fitEllipseDirect(contuors[0])
print(ellipse1)
print(ellipse2)
print(ellipse3)img = cv2.ellipse(img, ellipse1, (255, 0, 0), 3)
img = cv2.ellipse(img, ellipse2, (0, 255, 0), 2)
img = cv2.ellipse(img, ellipse3, (0, 0, 255), 1)cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
直线拟合
- 根据一组点拟合出一条直线,同样也可以为图像中的白色点拟合出一条直线。
import numpy as np
import cv2img = cv2.imread('./resource/opencv/image/boundrect.jpg', cv2.IMREAD_COLOR)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)(contuors, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)# 获取并绘制 直线拟合,直接绘制获取的坐标只有一半的线段
L = cv2.fitLine(contuors[0], cv2.DIST_L2, 0, 0.01, 0.01)
L = np.int32(L)
img = cv2.line(img, (L[0][0], L[1][0]), (L[2][0], L[3][0]), (0, 0, 255), 2)# 获取并绘制 计算出整幅图的直线拟合线
rows, cols = img.shape[:2]
[vx,vy,x,y] = cv2.fitLine(contuors[0], cv2.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
img = cv2.line(img,(cols-1,righty),(0,lefty),(0,255,0),2)cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()

轮廓的性质
长宽比
边界矩形的长宽比:
A s p e c t R a t i o n = W i d t h H e i g h t Aspect Ration = \frac{Width}{Height} AspectRation=HeightWidth
x,y,w,h = cv2.boundingRect(points)
aspect_ratio = float(w)/h
轮廓面积与边界矩形面积的比(Extent)
轮廓面积与边界矩形面积的比:
E x t e n t = O b j e c t A r e a B o u n d i n g R e c t a n g l e A r e a Extent = \frac{Object Area}{Bounding Rectangle Area} Extent=BoundingRectangleAreaObjectArea
area = cv2.contourArea(cnt)
x,y,w,h = cv2.boundingRect(cnt)
rect_area = w*h
extent = float(area)/rect_area
轮廓面积与凸包面积的比(Solidity)
轮廓面积与凸包面积的比:
S o l i d i t y = C o n t o u r A r e a C o n v e x H u l l A r e a Solidity= \frac{Contour Area}{Convex Hull Area} Solidity=ConvexHullAreaContourArea
area = cv2.contourArea(cnt)
hull = cv2.convexHull(cnt)
hull_area = cv2.contourArea(hull)
solidity = float(area)/hull_area
与轮廓面积相等的圆形的直径(Equivalent Diameter)
与轮廓面积相等的圆形的直径:
E q u i v a l e n t D i a m e t e r = 4 ∗ C o n t o u r A r e a π Equivalent Diameter = \sqrt{\frac{4*Contour Area}{\pi}} EquivalentDiameter=π4∗ContourArea
area = cv2.contourArea(cnt)
equi_diameter = np.sqrt(4*area/np.pi)
轮廓对象的方向
- (x,y),(MA,ma),angle = cv2.fitEllipse(cnt)
- 返回中心坐标,长轴和短轴的长度,对象的方向。
轮廓的掩模和像素点
有时我们需要构成对象的所有像素点:
mask = np.zeros(imgray.shape,np.uint8)
这里一定要使用参数-1, 绘制填充的的轮廓
cv2.drawContours(mask,[cnt],0,255,-1)
pixelpoints = np.transpose(np.nonzero(mask))
或
pixelpoints = cv2.findNonZero(mask)
最大值和最小值及它们的位置
可以使用掩模图像得到这些参数:
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(imgray,mask = mask)
平均颜色及平均灰度
可以使用相同的掩模求一个对象的平均颜色或平均灰度:
mean_val = cv2.mean(im,mask = mask)
对象轮廓的极点
- 一个对象最上面,最下面,最左边,最右边的点。
leftmost = tuple(cnt[cnt[:,:,0].argmin()][0])
rightmost = tuple(cnt[cnt[:,:,0].argmax()][0])
topmost = tuple(cnt[cnt[:,:,1].argmin()][0])
bottommost = tuple(cnt[cnt[:,:,1].argmax()][0])

轮廓的凸缺陷
- cv.convexityDefect()以帮助我们找到凸缺陷。函数调用如下:
hull = cv2.convexHull(cnt,returnPoints = False)
defects = cv2.convexityDefects(cnt,hull)
它会返回一个数组,其中每一行包含的值是 [起点,终点,最远的点,到最远点的近似距离]。我们可以在一张图上显示它。我们将起点和终点用一条绿线连接,在最远点画一个圆圈,要记住的是返回结果的前三个值是轮廓点的索引。所以我们还要到轮廓点中去找它们。
import numpy as np
import cv2img = cv2.imread('./resource/opencv/image/shape.jpg', cv2.IMREAD_COLOR)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
cnt = contours[0]hull = cv2.convexHull(cnt, returnPoints=False)
defects = cv2.convexityDefects(cnt, hull)for i in range(defects.shape[0]):s,e,f,d = defects[i, 0]start = tuple(cnt[s][0])end = tuple(cnt[e][0])far = tuple(cnt[f][0])cv2.line(img, start, end, [0, 255, 0], 2)cv2.circle(img, far, 5, [0, 0, 255], -1)cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()

点到轮廓的最短距离
求解一个点到轮廓的最短距离:
- dist = cv2.pointPolygonTest(contours[0], (20, 20), True)
measureDist=True,返回结果:
小于零:点在轮廓外部。
等于零:点在轮廓线上。
大于零:点在轮廓内部。 - stat = cv2.pointPolygonTest(contours[0], (20, 20), False)
measureDist=False,返回结果:
-1:点在轮廓外部
0:点在轮廓线上。
1:点在轮廓内部。
import numpy as np
import cv2img = cv2.imread('./resource/opencv/image/shape.jpg', cv2.IMREAD_COLOR)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)(ret, thresh) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
(contours, hierarchy) = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)# 求解图像中的一个点到一个对象轮廓的最短距离。
# 小于零:点在轮廓外部。
# 等于零:点在轮廓线上。
# 大于零:点在轮廓内部。
dist = cv2.pointPolygonTest(contours[0], (20, 20), True)#-1:点在轮廓外部
# 0:点在轮廓线上。
# 1:点在轮廓内部。
stat = cv2.pointPolygonTest(contours[0], (20, 20), False)print(dist)
print(stat)
形状匹配
- match = cv2.matchShapes(cntA, cntB, cv2.CONTOURS_MATCH_I1, 0.0)
返回值越小表示两个图形越相似。
有3中匹配方法:
- cv2.CONTOURS_MATCH_I1
- cv2.CONTOURS_MATCH_I2
- cv2.CONTOURS_MATCH_I3
import numpy as np
import cv2
from matplotlib import pyplot as pltimg = cv2.imread('./resource/opencv/image/matchshapesA.jpg', cv2.IMREAD_COLOR)
imgA = cv2.imread('./resource/opencv/image/matchshapesA.jpg', cv2.IMREAD_COLOR)
imgB = cv2.imread('./resource/opencv/image/matchshapesB.jpg', cv2.IMREAD_COLOR)
imgC = cv2.imread('./resource/opencv/image/matchshapesC.jpg', cv2.IMREAD_COLOR)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
grayA = cv2.cvtColor(imgA, cv2.COLOR_BGR2GRAY)
grayB = cv2.cvtColor(imgB, cv2.COLOR_BGR2GRAY)
grayC = cv2.cvtColor(imgC, cv2.COLOR_BGR2GRAY)(ret, th) = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
(retA, thA) = cv2.threshold(grayA, 127, 255, cv2.THRESH_BINARY)
(retB, thB) = cv2.threshold(grayB, 127, 255, cv2.THRESH_BINARY)
(retC, thC) = cv2.threshold(grayC, 127, 255, cv2.THRESH_BINARY)(contours, hierarchy) = cv2.findContours(th, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
(contoursA, hierarchyA) = cv2.findContours(thA, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
(contoursB, hierarchyB) = cv2.findContours(thB, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
(contoursC, hierarchyC) = cv2.findContours(thC, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)cnt = contours[0]
cntA = contoursA[0]
cntB = contoursB[0]
cntC = contoursC[0]m1 = cv2.matchShapes(cnt, cntA, cv2.CONTOURS_MATCH_I1, 0.0)
m2 = cv2.matchShapes(cnt, cntB, cv2.CONTOURS_MATCH_I1, 0.0)
m3 = cv2.matchShapes(cnt, cntC, cv2.CONTOURS_MATCH_I1, 0.0)# 程序运行结果
print(m1) # A与A的匹配度:0.0
print(m2) # A与B的匹配度:0.010547834665352251
print(m3) # A与C的匹配度:0.3313932685758914
从结果可以看出两个图形越相似值就越小,计算结果和图形的旋转相关性小,和图形的形状差异相关性大:

轮廓的层次结构
(contours, hierarchy) = cv2.findContours(th, mode, method)
轮廓的检索模式mode有如下几种:
-
cv2.RETR_LIST:只是提取所有的轮廓,而不去创建任何父子关系。换句话说就是“人人平等”,所有轮廓属于同一级组织轮廓。
-
cv2.RETR_TREE:返回所有轮廓,并且创建一个完整的组织结构列表。它甚至会告诉你谁是爷爷,爸爸,儿子,孙子等。
-
cv2.RETR_CCOMP:返回所有的轮廓并将轮廓分为两级组织结构。
-
cv2.RETR_EXTERNAL:只会返回最外边的的轮廓,所有的子轮廓都会被忽略掉。
-
不管层次结构是什么样的,每一个轮廓都包含自己的信息:谁是父,谁是子等。 OpenCV 使用一个含有四个元素的数组表示。 [Next, Previous,First_Child, Parent]。
-
Next 表示同一级组织结构中的下一个轮廓。以下图中的轮廓 0 为例,轮廓 1 就是他的 Next。同样,轮廓 1 的 Next是 2, Next=2。那轮廓 2 呢?在同一级没有 Next。这时 Next=-1。而轮廓 4 的 Next为 5,所以它的 Next=5。
-
Previous 表示同一级结构中的前一个轮廓。与前面一样,轮廓 1 的 Previous 为轮廓 0,轮廓 2 的 Previous 为轮廓 1。轮廓 0 没有 Previous,所以 Previous=-1。
-
First_Child 表示它的第一个子轮廓。没有必要再解释了,轮廓 2 的子轮廓为 2a。所以它的 First_Child 为2a。那轮廓 3a 呢?它有两个子轮廓。但是我们只要第一个子轮廓,所以是轮廓 4(按照从上往下,从左往右的顺序排序)。
-
Parent 表示它的父轮廓。与 First_Child 刚好相反。轮廓 4 和 5 的父轮廓是轮廓 3a。而轮廓 3a的父轮廓是 3。
轮廓的层次结构,比如轮廓之间的父子关系:
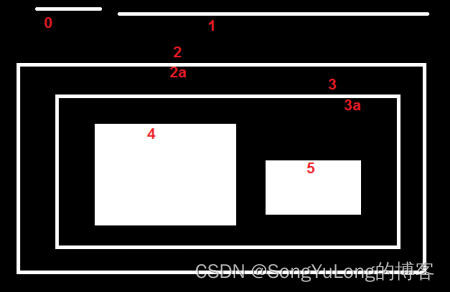
在这幅图像中,给这几个形状编号为 0-5。 2 和 2a 分别代表最外边矩形
的外轮廓和内轮廓。在这里边轮廓 0, 1, 2 在外部或最外边。我们可以称他们为(组织结构)0 级,简单来说就是他们属于同一级。
相关文章:
Python-OpenCV中的图像处理-图像轮廓
Python-OpenCV中的图像处理-图像轮廓 轮廓什么是轮廓查找轮廓绘制轮廓轮廓特征图像的矩轮廓面积轮廓周长(弧长)轮廓近似凸包凸性检测边界矩形直边界矩形旋转边界矩形(最小面积矩形)最小外接圆最小外接三角椭圆拟合直线拟合 轮廓的…...

@Cacheable缓存相关使用总结
本篇文章主要讲解Spring当中Cacheable缓存相关使用 在实际项目开发中,有些数据是变更频率比较低,但是查询频率比较高的,此时为了提升系统性能,可以使用缓存的机制实现,避免每次从数据库获取 第一步:使用E…...
c++ static
static 成员 声明为static的类成员称为类的静态成员,用static修饰的成员变量,称之为静态成员变量;用 static修饰的成员函数,称之为静态成员函数。静态成员变量一定要在类外进行初始化。 看看下面代码体会一下: //其他类 class …...
【数据结构】——栈、队列的相关习题
目录 题型一(栈与队列的基本概念)题型二(栈与队列的综合)题型三(循环队列的判空与判满)题型四(循环链表表示队列)题型五(循环队列的存储)题型六(循…...
C++初阶之一篇文章教会你list(模拟实现)
list(模拟实现) list模拟实现list_node节点结构定义std::__reverse_iterator逆向迭代器实现list迭代器 __list_iterator定义list类成员定义list成员函数定义1.begin()、end()、rbegin()和rend()2.empty_init()3.构造函数定义4.swap5.析构函数定义6.clear…...
设备工单管理系统如何实现工单流程自动化?
设备工单管理系统属于工单系统的一种,基于其丰富的功能,它可以同时处理不同的多组流程,旨在有效处理发起人提交的事情,指派相应人员完成服务请求和记录全流程。该系统主要面向后勤管理、设备维护、物业管理、酒店民宿等服务行业设…...

ubuntu20.04.6anzhuang mtt s80
需要打开主板的Resize BAR和Above 4G功能,否则GPU显存不能被正确识别; 2. 在某些不支持PCIe Gen5的主板上,需要把PCIe速率由auto设置为PCIe Gen4速率; sudo apt install lightdm unity-greetersheding lightdm : lightdm sudo apt install /…...

【LeetCode-中等】剑指 Offer 36. 二叉搜索树与双向链表
题目链接 剑指 Offer 36. 二叉搜索树与双向链表 标签 后序遍历、二叉搜索树 步骤 二叉搜索树中的任一节点的直接前驱为其左子树的最右侧节点,直接后继为其右子树的最左侧节点。因此,可以通过这个关系来操作原来的二叉树。为了不影响深度较大的节点的…...
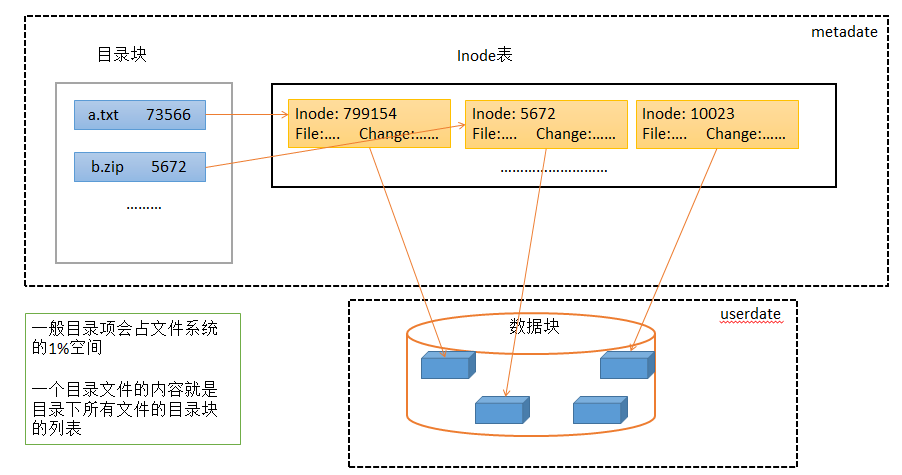
Linux —— 文件系统
目录 一,背景 二,文件系统 一,磁盘简介 磁盘分为SSD、机械磁盘;机械磁盘,即磁盘高速转动,磁头移动到读写扇区所在磁道,让磁头在目标扇区上划过,即可完成对扇区的读写操作ÿ…...

自然策略优化的解释 Natural Policy Optimization
Natural Policy Optimization(自然策略优化)是一种用于优化策略梯度算法的方法。它是基于概率策略的强化学习算法,旨在通过迭代地更新策略参数来最大化累积回报。 传统的策略梯度算法通常使用梯度上升法来更新策略参数,但这种方法…...

docker基本使用方法
docker使用 1. Docker 介绍 Docker 可以让开发者打包他们的应用以及依赖包到一个轻量级、可移植的容器中,然后发布到任何流行的 Linux 机器上,也可以实现虚拟化。Docker 使您能够将应用程序与基础架构分开,从而可以快速交付软件。通过利用 …...
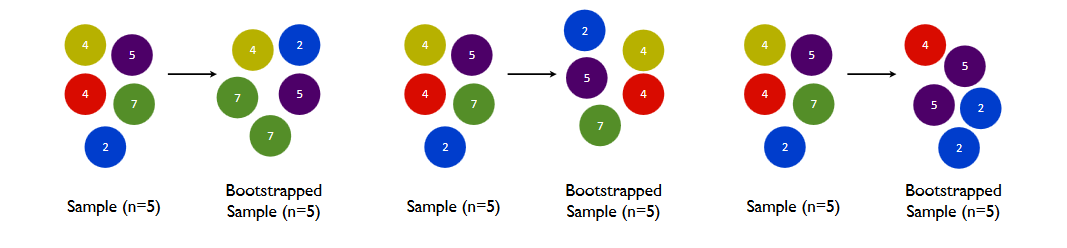
机器学习(十八):Bagging和随机森林
全文共10000余字,预计阅读时间约30~40分钟 | 满满干货(附数据及代码),建议收藏! 本文目标:理解什么是集成学习,明确Bagging算法的过程,熟悉随机森林算法的原理及其在Sklearn中的各参数定义和使用方法 代码…...
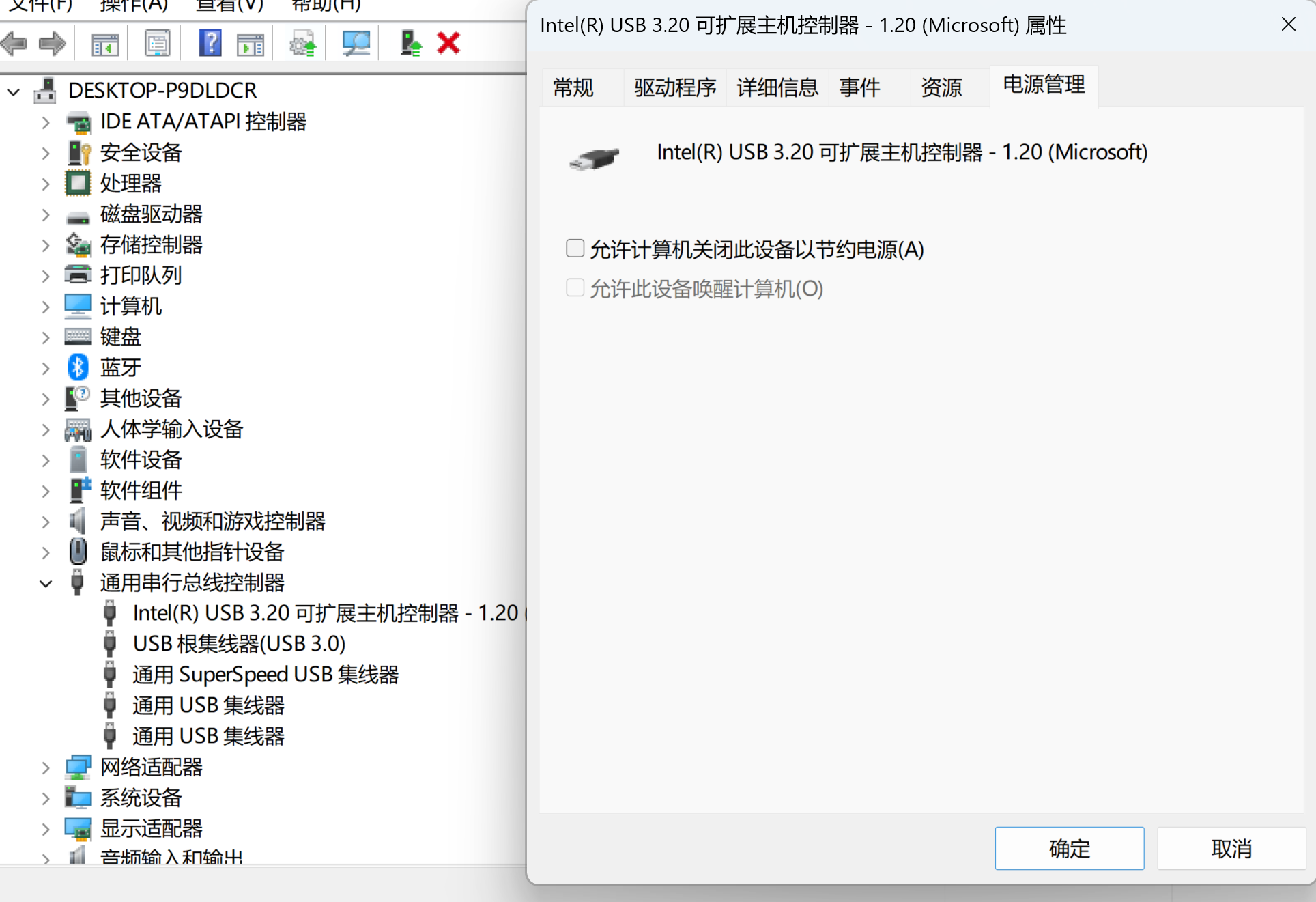
使用蓝牙外设却不小心把台式机电脑蓝牙关了
起因 今天犯了一个贼SB的错误,起因是蓝牙键盘突然就不能输入了(虽然是连接状态,但是按什么键都没有反应) 原来我的解决方法就是重启一下电脑,但是那会电脑开了贼多的软件。我就想重启也太麻烦了,既然重启…...

美国Linux服务器安装Grafana和配置zabbix数据源的教程
美国Linux服务器的Grafana工具是跨平台、开源、时序和可视化面板Dashboard监控平台工具,是在日常管理中帮忙提高效率的实用工具,可以通过将采集的美国Linux服务器系统数据查询后,进行可视化的展示及通知,本文小编就来介绍下美国Li…...

[ROS安装问题] rosdep update 失败报错
【关于ROS安装】 由于日益复杂的国际形势,按照wiki官网的ROS安装流程变得相当困难,这里我推荐使用鱼香ROS大佬写的脚本一键傻瓜式安装: wget http://fishros.com/install -O fishros && . fishros 【关于rosdep失败】 这已经是一…...
Vue2到3 Day5 全套学习内容,众多案例上手(内付源码)
简介: Vue2到3 Day1-3 全套学习内容,众多案例上手(内付源码)_星辰大海1412的博客-CSDN博客本文是一篇入门级的Vue.js介绍文章,旨在帮助读者了解Vue.js框架的基本概念和核心功能。Vue.js是一款流行的JavaScript前端框架…...
STM32 CubeMX (uart_IAP串口)简单示例
STM32 CubeMX STM32 CubeMX (串口IAP) STM32 CubeMXIAP有什么用?整体思路 一、STM32 CubeMX 设置时钟树UART使能UART初始化设置 二、代码部分文件移植
Kafka:安装和配置
producer:发布消息的对象,称为消息产生者 (Kafka topic producer) topic:Kafka将消息分门别类,每一个消息称为一个主题(topic) consumer:订阅消息并处理发布消息的对象…...

786. 第k个数
文章目录 QuestionIdeasCode Question 给定一个长度为 n 的整数数列,以及一个整数 k ,请用快速选择算法求出数列从小到大排序后的第 k 个数。 输入格式 第一行包含两个整数 n 和 k 。 第二行包含 n 个整数(所有整数均在 1∼109 范围内&…...

用友-NC-Cloud远程代码执行漏洞[2023-HW]
用友-NC-Cloud远程代码执行漏洞[2023-HW] 一、漏洞介绍二、资产搜索三、漏洞复现PoC小龙POC检测脚本: 四、修复建议 免责声明:请勿利用文章内的相关技术从事非法测试,由于传播、利用此文所提供的信息或者工具而造成的任何直接或者间接的后果及损失&#…...

MQTTX+Qt联合调试指南:手把手搭建物联网通信测试环境
MQTTXQt联合调试指南:手把手搭建物联网通信测试环境 在物联网开发中,MQTT协议因其轻量级和高效性成为设备通信的首选方案。而Qt框架的跨平台特性与MQTTX工具的直观可视化界面,为开发者提供了从原型验证到产品落地的完整工具链。本文将带您从零…...

SpringBoot配置安全实战:从明文到ENC加密的进阶之路
1. 为什么你的SpringBoot配置正在"裸奔"? 记得去年我接手一个微服务项目时,发现所有数据库密码、Redis密钥都直接写在application.yml里,就像把家门钥匙挂在门把手上。更可怕的是,这些配置文件还被提交到了GitHub公开仓…...

一文学会Excel条件格式:让数据自己“开口说话“
🏷️ 标签:Excel | 条件格式 | 数据可视化 | Excel技巧 | 办公效率 | 数据分析 前言:你的表格,为什么"不会说话"? 先看一个场景。 你的领导让你整理一份销售月报,数据如下: 姓名 销售额 是否达标 张三 48000 否 李四 52000 是 王五 31000 否 赵六 65000 是…...

别再死记硬背ARP了!用Wireshark抓包,5分钟带你亲眼看看局域网‘喊话’全过程
用Wireshark解密ARP协议:从抓包实战看局域网如何"喊话" 当你第一次听说ARP协议时,是否也被那些"广播请求"、"单播响应"的抽象概念搞得一头雾水?作为网络通信的基础协议之一,ARP(地址解析…...

群晖Docker部署Calibre Web踩坑全记录:从权限报错到Kindle推送,一篇讲透所有常见问题
群晖Docker部署Calibre Web全流程避坑指南:从权限配置到Kindle推送实战 每次打开硬盘里堆积如山的电子书却无从下手时,一个得力的书库管理系统就显得尤为重要。作为电子书爱好者的终极解决方案,Calibre Web以其优雅的界面和强大的功能赢得了众…...

Joplin跨设备同步冲突:数据一致性保障机制解析
Joplin跨设备同步冲突:数据一致性保障机制解析 【免费下载链接】joplin Joplin - the privacy-focused note taking app with sync capabilities for Windows, macOS, Linux, Android and iOS. 项目地址: https://gitcode.com/GitHub_Trending/jo/joplin 你在…...

从不确定性到规律:随机信号的统计建模与工程应用
1. 随机信号:从噪声中寻找规律 第一次接触随机信号时,我盯着示波器上跳动的曲线发懵——这看起来就像一堆杂乱无章的毛线团。但导师告诉我:"这些看似混乱的波形里藏着宝藏,关键是要找到正确的解码方式。"十年后我才真正…...

PUBG-Logitech压枪脚本深度解析与进阶实战指南
PUBG-Logitech压枪脚本深度解析与进阶实战指南 【免费下载链接】PUBG-Logitech PUBG罗技鼠标宏自动识别压枪 项目地址: https://gitcode.com/gh_mirrors/pu/PUBG-Logitech PUBG-Logitech是一款基于C和Qt框架开发的专业级绝地求生游戏压枪辅助工具,通过先进的…...

如何破解音频格式限制:3步解锁QQ音乐加密文件的完整指南
如何破解音频格式限制:3步解锁QQ音乐加密文件的完整指南 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder 你是否曾经下载了一首喜欢的歌曲,却只能在特…...

Spring Boot WebFlux 响应式性能测试
Spring Boot WebFlux响应式性能测试:解锁高并发潜力 在当今高并发、低延迟的应用场景中,传统的同步阻塞式架构逐渐暴露出性能瓶颈。Spring Boot WebFlux作为响应式编程的典范,通过非阻塞I/O和事件驱动模型,为开发者提供了更高效的…...