STM32F429IGT6使用CubeMX配置SPI通信(W25Q256芯片)
1、硬件电路
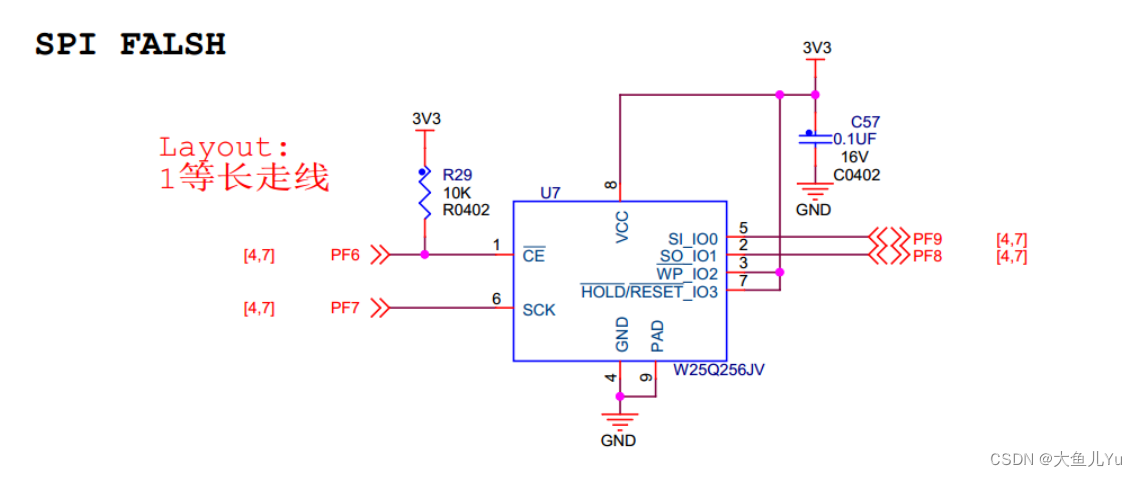
需要系统性的看一下W25Q256芯片手册
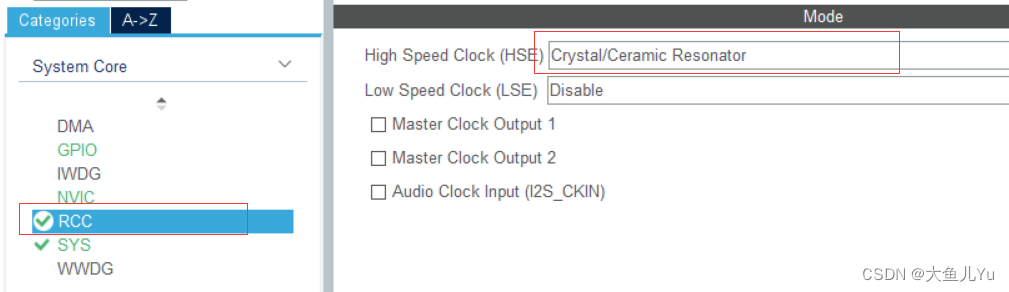
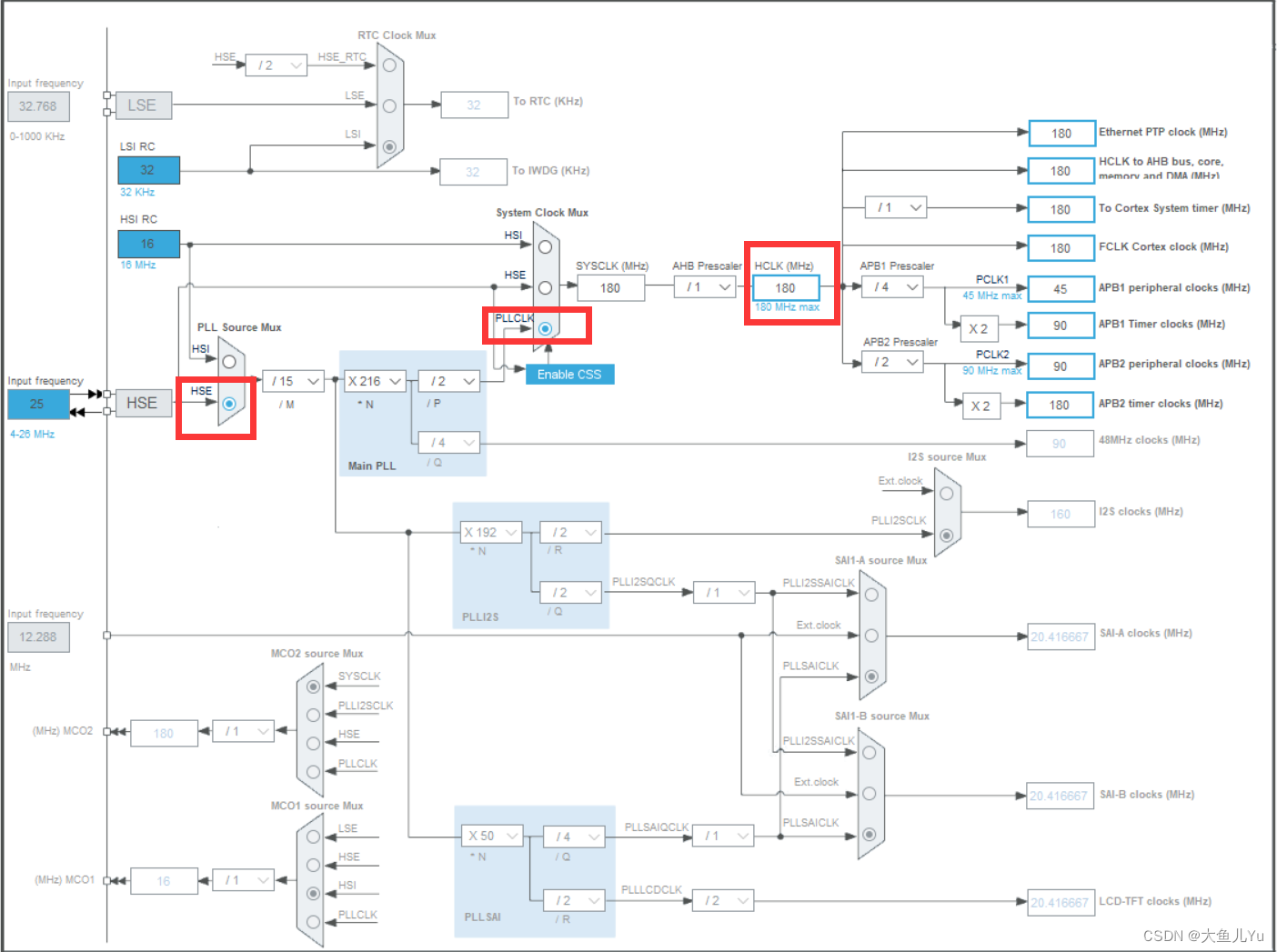
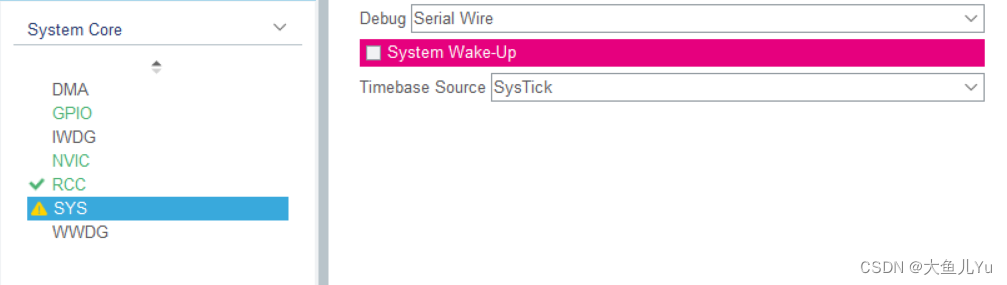
2、设置RCC,选择高速外部时钟HSE,时钟设置为180MHz
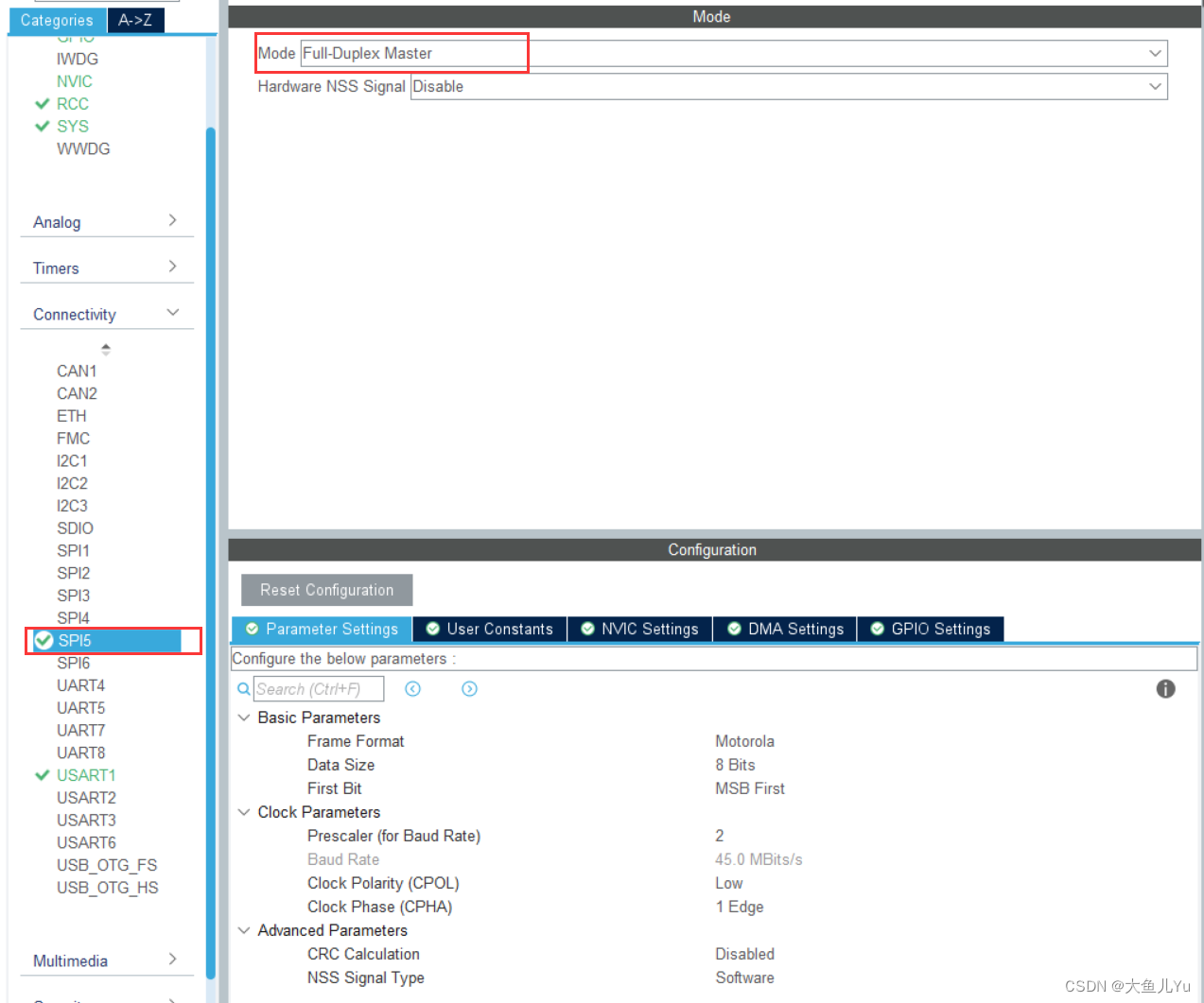
3、配置SPI
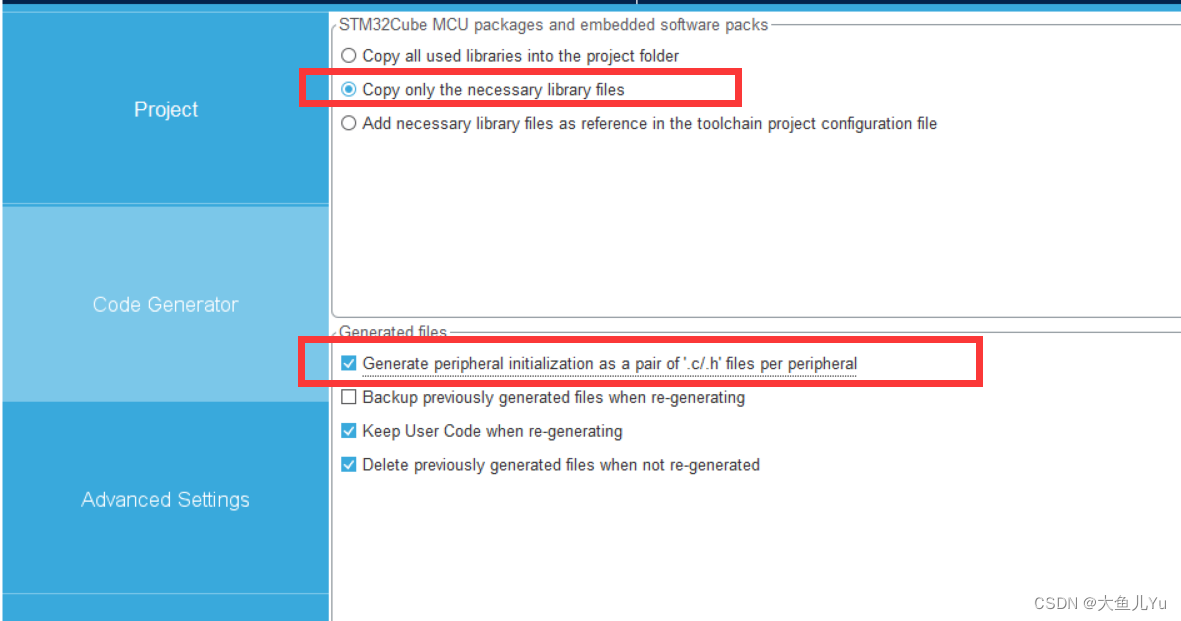
4、生成工程配置

5、相关代码
#define sFLASH_ID 0XEF4019 // W25Q256#define SPI_FLASH_PageSize 256
#define SPI_FLASH_PerWritePageSize 256#define W25Q256_WriteEnable 0x06 // 写使能指令
#define W25Q256_WriteDisable 0x04 // 写屏蔽指令
#define W25Q256_ReadStatusReg 0x05 // 读取状态寄存器1
#define W25Q256_WriteStatusReg 0x01 // 写入状态寄存器1
//#define W25Q256_ReadData 0x03 // 3字节模式读取数据指令
#define W25Q256_ReadData 0x13 // 4字节模式读取数据指令
#define W25Q256_FastReadData 0x0B //
#define W25Q256_FastReadDual 0x3B
#define W25Q256_PageProgram 0x02 // 页写入指令
#define W25Q256_BlockErase 0xD8
#define W25Q256_SectorErase 0x20
#define W25Q256_ChipErase 0xC7
#define W25Q256_PowerDown 0xB9
#define W25Q256_ReleasePowerDown 0xAB
#define W25Q256_DeviceID 0xAB
#define W25Q256_ManufactDeviceID 0x90
#define W25Q256_JedecDeviceID 0x9F
#define W25Q256_Enter4ByteMode 0xB7 // 4字节地址模式指令
#define W25Q256_ReadStatusRegister3 0x15
#define W25Q256_WriteStatusRegister3 0x11 //写状态寄存器3指令
#define WIP_Flag 0x01
#define Dummy_Byte 0xFF#define FLASH_WriteAddress 0x00000
#define FLASH_ReadAddress FLASH_WriteAddress
#define FLASH_SectorToErase FLASH_WriteAddress/* 获取缓冲区的长度 */
#define TxBufferSize1 (countof(TxBuffer1) - 1)
#define RxBufferSize1 (countof(TxBuffer1) - 1)
#define countof(a) (sizeof(a) / sizeof(*(a)))
#define BufferSize (countof(Tx_Buffer) - 1)#define FLASH_WriteAddress 0x00000
#define FLASH_ReadAddress FLASH_WriteAddress
#define FLASH_SectorToErase FLASH_WriteAddress/* 发送缓冲区初始化 */
extern uint8_t ReadBuff[4096];
extern uint8_t WriteBuff[4096];/*** @brief 拉低片选线* @param 无* @retval 无*/
void SPI_FLASH_NSS_LOW(void)
{HAL_GPIO_WritePin(SPI5_NSS_GPIO_Port, SPI5_NSS_Pin, GPIO_PIN_RESET);
}/*** @brief 拉高片选线* @param 无* @retval 无*/
void SPI_FLASH_NSS_HIGH(void)
{HAL_GPIO_WritePin(SPI5_NSS_GPIO_Port, SPI5_NSS_Pin, GPIO_PIN_SET);
}/*** @brief 获取 FLASH ID* @param 无* @retval FLASH ID*/
uint32_t SPI_FLASH_ReadID(void)
{uint32_t temp = 0;uint32_t temp0 = 0;uint32_t temp1 = 0;uint32_t temp2 = 0;// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送获取W25Q256芯片ID指令SPI_FLASH_SendByte(W25Q256_JedecDeviceID);// 接收数据temp0 = SPI_FLASH_ReadByte();temp1 = SPI_FLASH_ReadByte();temp2 = SPI_FLASH_ReadByte();// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();temp = temp0 << 16 | temp1 << 8 | temp2;return temp;
}/*** @brief 发送一个字节* @param 无* @retval 无*/
void SPI_FLASH_SendByte(uint8_t ch)
{HAL_SPI_Transmit(&hspi5, &ch, 1, 500);
}/*** @brief 发送n个字节* @param pData:发送数据首地址* @param data_number:发送数据个数(以字节为单位)* @retval 无*/
void SPI_FLASH_SendnByte(uint8_t *pData, uint32_t data_number)
{HAL_SPI_Transmit(&hspi5, pData, data_number, 500);
}/*** @brief 接收一个字节* @param 无* @retval 接收的数据*/
uint8_t SPI_FLASH_ReadByte(void)
{uint8_t rxData = 0;HAL_SPI_Receive(&hspi5, &rxData, 1, 500);return rxData;
}/*** @brief 接收n个字节* @param pData:接收数据首地址* @param data_number:接收数据个数(以字节为单位)* @retval 无*/
void SPI_FLASH_ReadnByte(uint8_t *pData, uint32_t data_number)
{HAL_SPI_Receive(&hspi5, pData, data_number, 500);
}/*** @brief 使能写命令* @param 无* @param 无* @retval 无*/
void SPI_FLASH_WriteEnable(void)
{// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送写使能指令SPI_FLASH_SendByte(W25Q256_WriteEnable);// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();
}/*** @brief 等待写入、擦除等操作完成* @param 无* @param 无* @retval 无*/
void SPI_FLASH_WaitForWriteEnd(void)
{uint8_t FLASH_Status = 0;// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送写状态寄存器1指令SPI_FLASH_SendByte(W25Q256_ReadStatusReg);do{// 获取写状态寄存器1的值并做判断。0:空闲、1:忙碌FLASH_Status = SPI_FLASH_ReadByte();} while (SET == (FLASH_Status & WIP_Flag));// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();
}/*** @brief 擦除扇区* @param SectorAddr:擦除扇区首地址* @retval 无*/
void SPI_FLASH_SectorErase(uint32_t SectorAddr)
{// uint8_t ADDR[4] = {0x00,0x00,0x00,0x00};// 使能写命令SPI_FLASH_WriteEnable();// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送擦除扇区命令SPI_FLASH_SendByte(W25Q256_SectorErase);// 发送擦除地址24 ~ 31bitSPI_FLASH_SendByte((SectorAddr & 0xFF000000) >> 24);// 发送擦除地址16 ~ 23bitSPI_FLASH_SendByte((SectorAddr & 0xFF0000) >> 16);// 发送擦除地址8 ~ 15bitSPI_FLASH_SendByte((SectorAddr & 0xFF00) >> 8);// 发送擦除地址0 ~ 7bitSPI_FLASH_SendByte(SectorAddr & 0xFF);// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();// HAL_Delay(3000);// 等待擦除操作结束SPI_FLASH_WaitForOperaEnd();
}/*** @brief 配置4字节模式* @param 无* @retval 无*/
void SPI_FLASH_FOUR_MODE(void)
{uint8_t temp = 0;// 使能写命令SPI_FLASH_WriteEnable();// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送写状态寄存器3命令SPI_FLASH_SendByte(W25Q256_WriteStatusRegister3);// 发送要写的数据SPI_FLASH_SendByte(0x02);// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送读状态寄存器3命令SPI_FLASH_SendByte(W25Q256_ReadStatusRegister3);// 读取数据temp = SPI_FLASH_ReadByte();// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();if (1 == (0x02 & temp)){// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送配置四字节模式指令SPI_FLASH_SendByte(W25Q256_Enter4ByteMode);// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();}SPI_FLASH_WaitForOperaEnd();
}/*** @brief 对 FLASH 按页写入数据,调用本函数写入数据前需要先擦除扇区* @param pBuffer:要写入数据的指针* @param WriteAddr:写入数据地址* @param NumByteToWrite:写入数据长度。必须小于等于SPI_FLASH_PerWritePageSize* @retval 无*/
void SPI_FLASH_PageWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{// 使能写命令SPI_FLASH_WriteEnable();// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送页写入指令SPI_FLASH_SendByte(W25Q256_PageProgram);// 发送写入地址[24,31]bitSPI_FLASH_SendByte((WriteAddr & 0xFF000000) >> 24);// 发送写入地址[16,23]bitSPI_FLASH_SendByte((WriteAddr & 0xFF0000) >> 16);// 发送写入地址[8,15]bitSPI_FLASH_SendByte((WriteAddr & 0xFF00) >> 8);// 发送写入地址[0,7]bitSPI_FLASH_SendByte(WriteAddr & 0xFF);if (NumByteToWrite > SPI_FLASH_PerWritePageSize){NumByteToWrite = SPI_FLASH_PerWritePageSize;printf("256\r\n");}for (int i = 0; i < NumByteToWrite; i++){SPI_FLASH_SendByte(pBuffer[i]);}// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();
}/*** @brief FALSH不定量数据写入函数,调用本函数写入数据前需要先擦除扇区* @param pBuffer:要写入数据的指针* @param WriteAddr:写入数据地址* @param NumByteToWrite:写入数据长度* @retval 无*/
void SPI_FLASH_BufferWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint8_t NumOfPage = 0;uint8_t NumOfSingle = 0;uint8_t Addr = 0;uint8_t count = 0;uint8_t temp = 0;/*mod 运算求余,若 writeAddr 是 SPI_FLASH_PageSize 整数倍,运算结果 Addr 值为0*/Addr = WriteAddr % SPI_FLASH_PageSize;/* 差 count 个数据值,刚好可以对齐到页地址 */count = SPI_FLASH_PageSize - Addr;/* 计算出要写多少整数页 */NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;/*mod 运算求余,计算出剩余不满一页的字节数 */NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;/* Addr=0, 则 WriteAddr 刚好按页对齐 aligned */if (0 == Addr){/*NumByteToWrite < SPI_FLASH_PageSize*/if (0 == NumOfPage){SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成}else{/* 先把整数页都写了 */for (int i = 0; i < NumOfPage; i++){SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}/* 若有多余的不满一页的数据,把它写完 */SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成}}else /* 若地址与 SPI_FLASH_PageSize 不对齐 */{/*NumByteToWrite < SPI_FLASH_PageSize*/if (0 == NumOfPage){/* 当前页剩余的 count 个位置比 NumOfSingle 小,写不完 */if (NumOfSingle > count){temp = NumOfSingle - count;/* 先写满当前页 */SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成WriteAddr += count;pBuffer += count;/* 再写剩余的数据 */SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成}else /* 当前页剩余的 count 个位置能写完 NumOfSingle 个数据 */{SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成}}else /*NumByteToWrite > SPI_FLASH_PageSize*/{/*先把距离页地址的count个数据减去,计算需要写的页数和NumOfSingle,然后写数据时先把原来减去的count个数据写入,写满当前页*//*再写剩余数据,即计算好的NumOfPage和NumOfSingle*/NumByteToWrite -= count;NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成WriteAddr += count;pBuffer += count;/* 把整数页都写了 */for (int i = 0; i < NumOfPage; i++){SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}if (0 != NumOfSingle){SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成}}}
}/*** @brief 读取FLASH数据* @param pBuffer:存储读出数据的指针* @param WriteAddr:读取地址* @param NumByteToRead:读取数据长度* @retval 无*/
void SPI_FLASH_BufferRead(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送读取数据指令SPI_FLASH_SendByte(W25Q256_ReadData);// 发送读取地址[24,31]bitSPI_FLASH_SendByte((ReadAddr & 0xFF000000) >> 24);// 发送读取地址[16,23]bitSPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);// 发送读取地址[8,15]bitSPI_FLASH_SendByte((ReadAddr & 0xFF00) >> 8);// 发送读取地址[0,7]bitSPI_FLASH_SendByte(ReadAddr & 0xFF);// 读取数据for (int i = 0; i < NumByteToRead; i++){// 读取一个字节数据pBuffer[i] = SPI_FLASH_ReadByte();}// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();SPI_FLASH_WaitForOperaEnd(); // 等待操作完成
}/*** @brief 等待写入、擦除等操作结束* @param none* @param none* @param none* @retval none*/
void SPI_FLASH_WaitForOperaEnd(void)
{uint8_t FLASH_Status = 0;// 拉低片选线,开始通信SPI_FLASH_NSS_LOW();// 发送读状态寄存器1指令SPI_FLASH_SendByte(W25Q256_ReadStatusReg);do{// 接收读取状态寄存器1寄存器内容FLASH_Status = SPI_FLASH_ReadByte();} while (SET == (FLASH_Status & WIP_Flag));// 拉高片选线,结束通信SPI_FLASH_NSS_HIGH();
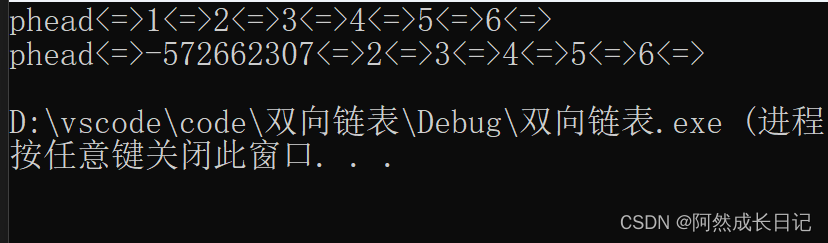
}int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_SPI5_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */// 进入4字节地址模式SPI_FLASH_FOUR_MODE();printf("W25Q256 SPI readwrite test!!!\r\n");device_ID = SPI_FLASH_ReadID();printf("device_ID = 0x%x\r\n", device_ID);SPI_FLASH_SectorErase(0x00); // 擦除扇区数据// 读取擦除后的数据SPI_FLASH_BufferRead(ReadBuff, 0x00, 4096);printf("*****************读取擦出后的数据*****************\r\n");for (int i = 0; i < 4096; i++){printf("ReadBuff[%d] = 0x%02x\t", i, ReadBuff[i]);if (0 == (i + 1) % 8 && (i + 1) >= 8){printf("\r\n");}}for (int i = 0; i < 256; i++){WriteBuff[i] = i;}SPI_FLASH_BufferWrite(WriteBuff, 0xFF, 256);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成// 读数据SPI_FLASH_BufferRead(ReadBuff, 0xFF, 256);SPI_FLASH_WaitForOperaEnd(); // 等待操作完成printf("*****************读取写入后的数据*****************\r\n");for (int i = 0; i < 256; i++){printf("ReadBuff[%d] = 0x%02x\t", i, ReadBuff[i]);if (0 == (i + 1) % 8 && (i + 1) >= 8){printf("\r\n");}}/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */LED_TIME();}/* USER CODE END 3 */
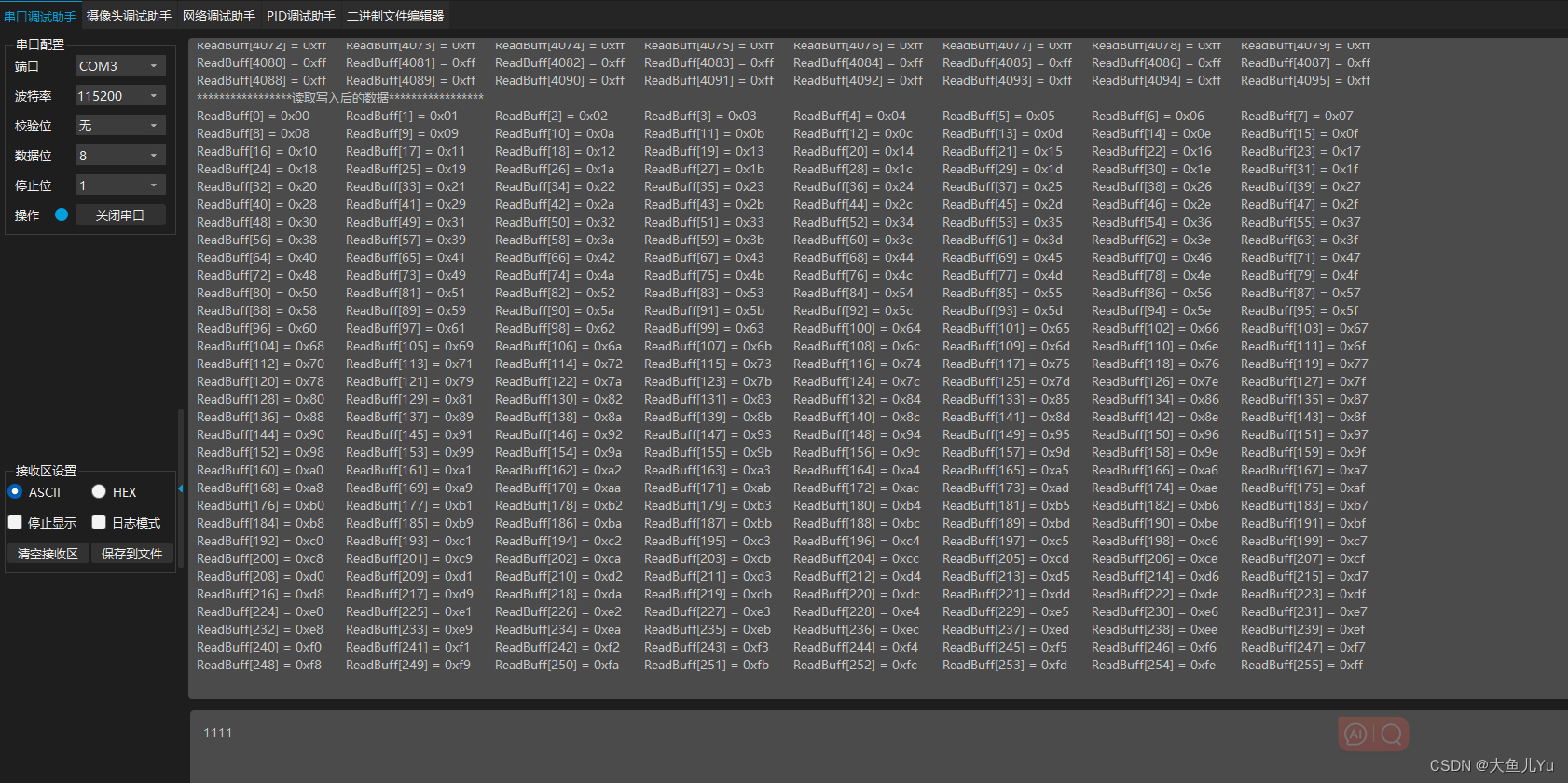
}6、实验现象
相关文章:
STM32F429IGT6使用CubeMX配置SPI通信(W25Q256芯片)
1、硬件电路 需要系统性的看一下W25Q256芯片手册 2、设置RCC,选择高速外部时钟HSE,时钟设置为180MHz 3、配置SPI 4、生成工程配置 5、相关代码 #define sFLASH_ID 0XEF4019 // W25Q256#define SPI_FLASH_PageSize 256 #define SPI_FLASH_PerWritePageSize 256#def…...

C++11异步与通信之 packaged_task
概念简介 packaged_task 用于包装可调用目标(Callable)为一个对象,如lambda,普通函数,小括号重载等,用于异步调用。 其返回值或所抛异常被存储于能通过 std::future 对象访问的共享状态中,和promise类似。 将函数的调用与函数返…...
磁盘的管理
一、磁盘的分区 查看磁盘 lsblk fdisk -l 2、分区 没有e扩展,则都是主分区,已经有三个主分区了,剩下的全设置为扩展 查看分区结果: 二、格式化 三、挂载...

数据结构:完全二叉树的性质
完全二叉树的性质: 具有 n n n个结点的完全二叉树的深度为 [ l o g 2 n ] 1 ( [ x ] 表示不大于 x 的最大整数 ) [log_2n]1([x]表示不大于x的最大整数) [log2n]1([x]表示不大于x的最大整数) 对于任意一个结点 ( 1 < i < n ) &…...
【数据结构】‘双向链表’冲冲冲
💐 🌸 🌷 🍀 🌹 🌻 🌺 🍁 🍃 🍂 🌿 🍄🍝 🍛 🍤 📃个人主页 :阿然成长日记 …...
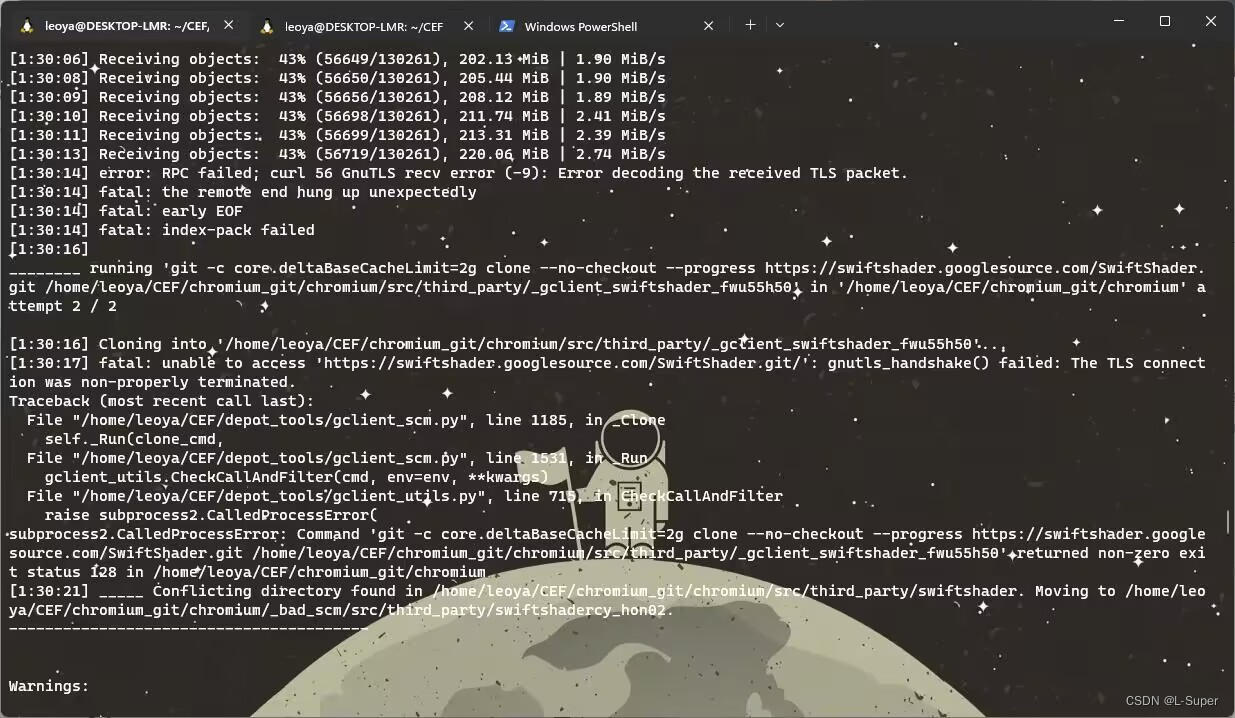
Linux 编译CEF源码详细记录
Linux CEF(Chromium Embedded Framework)源码下载编译 背景 由于CEF默认的二进制分发包不支持音视频播放,需要自行编译源码,将ffmpeg开关打开才能支持。这里介绍的是Linux平台下的CEF源码下载编译过程。 Windows平台参考&#…...

LeetCode 2810. Faulty Keyboard【模拟,双端队列,字符串】简单
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...
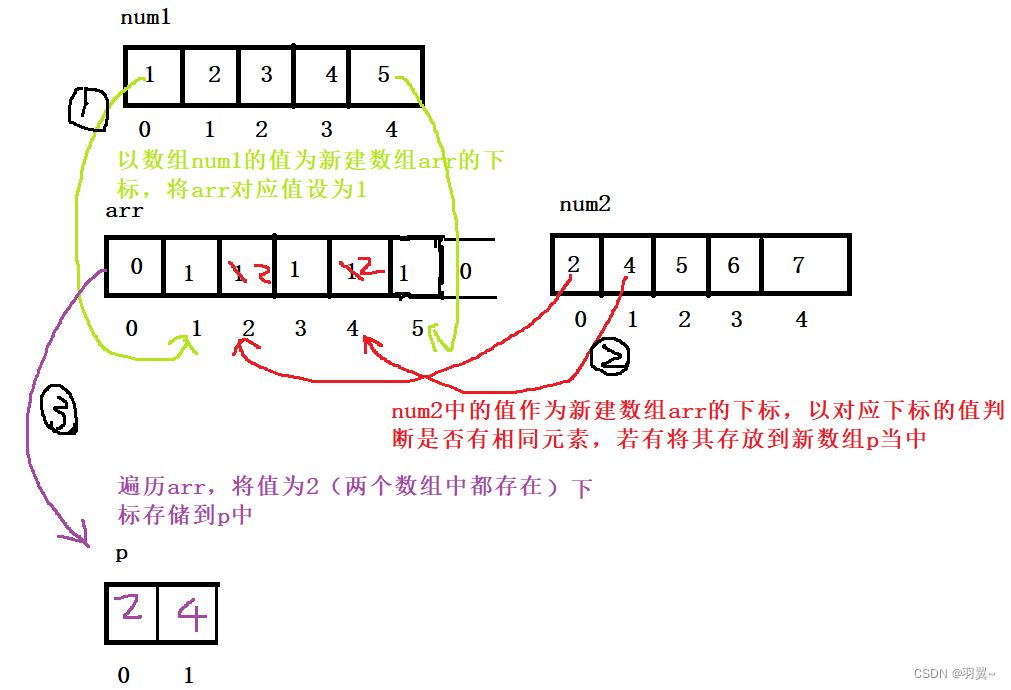
两个数组的交集-C语言/Java
描述 给定两个数组 nums1 和 nums2 ,返回 它们的交集 。输出结果中的每个元素一定是 唯一 的。我们可以 不考虑输出结果的顺序。(1 < nums1.length, nums2.length < 1000,0 < nums1[i], nums2[i] < 1000) 示例1 输入…...

Arduino+esp32学习笔记
学习目标: 使用Arduino配置好蓝牙或者wifi模块 学习使用python配置好蓝牙或者wifi模块 学习内容(笔记): 一、 Arduino语法基础 Arduino语法是基于C的语法,C又是c基础上增加了面向对象思想等进阶语言。那就只记录没见过的。 单多…...

计算机网络-专业术语
计算机网络-专业术语 实体 实体:任何可发送或接收信息的硬件或软件进程 对等实体:收发双方相同层次中的实体 协议 控制两个对等实体进行逻辑通信的规则的集合 协议三要素 语法 定义所交换的信息的格式 是用户数据与控制信息的结构和格式 语义 定义收发双方所需要完成的操作…...

E. Maximum Monogonosity
You are given an array aa of length nn and an array bb of length nn. The cost of a segment [l,r][l,r], 1≤l≤r≤n1≤l≤r≤n, is defined as |bl−ar||br−al||bl−ar||br−al|. Recall that two segments [l1,r1][l1,r1], 1≤l1≤r1≤n1≤l1≤r1≤n, and [l2,r2][l2,…...

已解决Excel file format cannot be determined, you must specify an engine manually
问题 我使用以下语句时出现错误 data pd.read_excel(temp_inputc.csv, headerNone)出现错误: Excel file format cannot be determined, you must specify an engine manually有很多人说添加engine,但接下来会出现这个错误: File is not…...

Centos yum命令大全
1.使用YUM查找软件包 $ yum search python 2.列出所有可安装的软件包 $ yum list | grep python 3.列出所有可更新的软件包 $ yum list updates 4.列出所有已安装的软件包 $ yum list installed | grep python...

内网横向移动—ARP攻击图片捕捉数据劫持DNS劫持
内网横向移动—ARP攻击&图片捕捉&数据劫持&DNS劫持 1. ARP1.1. APR介绍1.1.1. ARP工作原理1.1.2. APR欺骗工作原理 1.2. 环境准备1.3. 适用场景 2. ARP断网攻击演示2.1. 使用kali进行演示2.1.1. nmap判断存活2.1.2. 安装工具2.1.3. 攻击Windows 10虚拟机2.1.3.1. 查…...

react之Hooks的介绍、useState与useEffect副作用的使用
react之Hooks的介绍、useState与useEffect副作用的使用 一、Hooks的基本介绍二、useState的使用2.1 简单使用2.2 数组结构简化2.3 状态的读取和修改2.3 组件的更新过程 三、useEffect的使用3.1 副作用介绍3.2 基本使用3.3 依赖3.4 不要对依赖项撒谎3.5 依赖项可以是空数组3.6 清…...
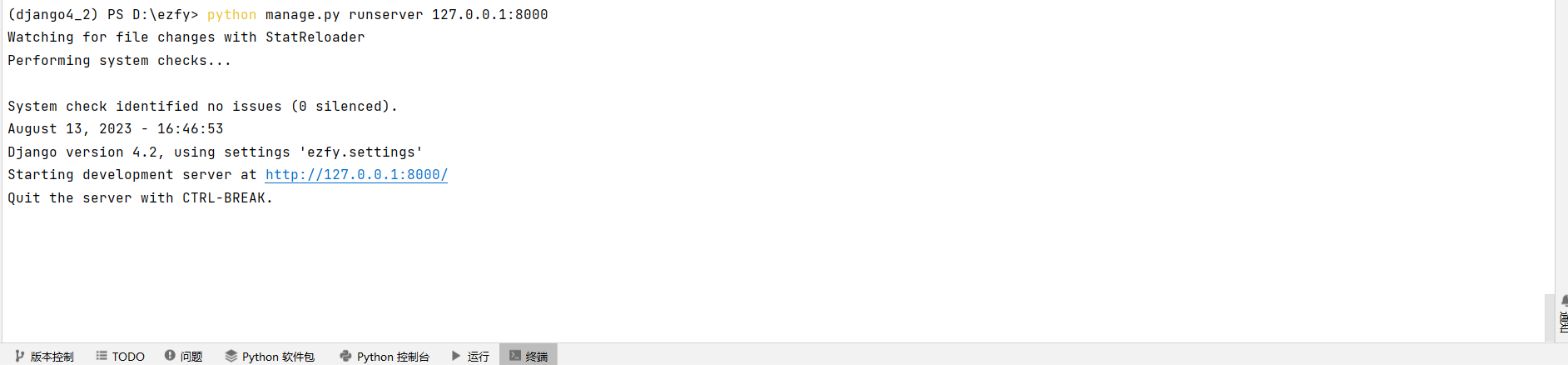
django——创建 Django 项目和 APP
2.创建 Django 项目和 APP 命令: 创建Django项目 django-admin startproject name 创建子应用 python manager.py startapp name 2.1 创建工程 在使用Flask框架时,项目工程目录的组织与创建是需要我们自己手动创建完成的。 在django中,…...

== 和 equals 的对比 [面试题]
和 equals 的对比[面试题] 文章目录 和 equals 的对比[面试题]1. 和 equals 简介2. Object 类中 equals() 源码3. String 类中 equals() 源码4. Integer 类中 equals() 源码5. 如何重写 equals 方法 1. 和 equals 简介 是一个比较运算符 :既可以判断基本数据类型…...
SpringBoot集成Redis及Redis使用方法
目录 应用背景 Redis简介 更新问题 一:环境配置 1.1: 在pom.xml文件中添加依赖 1.2:配置SpringBoot核心配置文件application.properties 二:在Config文件夹中创建RedisConfig配置文件类 2.1:RedisTemplate中的几个角色&am…...

Redis可以用作数据库吗?它的适用场景是什么?
是的,Redis可以用作数据库。虽然Redis通常被认为是一个内存数据库(in-memory database),但它也可以通过持久化机制将数据保存在磁盘上,以便在重启后恢复数据。 Redis的适用场景包括但不限于以下几个方面: …...

@Param详解
文章目录 背景什么是ParamParam的使用方法使用方法:遇到的问题及因Param解决了什么问题使用与不使用对比 Param是如何进行映射的总结 背景 最近在开发过程中,在写mapper接口是在参数前加了Param注解,但是在运行的时候就会报错,说…...

Vue 3 技术演进全景
2026 年的 Vue 3 生态已彻底告别了“Vue 2 升级版”的定位,转而进化为一个高性能、编译时优化、深度 TypeScript 集成的现代化框架体系。核心变化不仅在于 API 的丰富,更在于底层渲染模型的颠覆。 一、Vue 3.5:响应式系统的“外星信号”与开发体验飞跃 Vue 3.5 是当前(202…...

如何实现跨设备音频共享?Scream虚拟声卡网络传输终极指南
如何实现跨设备音频共享?Scream虚拟声卡网络传输终极指南 【免费下载链接】scream Virtual network sound card for Microsoft Windows 项目地址: https://gitcode.com/gh_mirrors/sc/scream 你是否曾想过将电脑音频无线传输到其他设备播放?无论是…...

终极指南:如何用Testsigma在30分钟内搭建企业级自动化测试平台
终极指南:如何用Testsigma在30分钟内搭建企业级自动化测试平台 【免费下载链接】testsigma Testsigma is an agentic test automation platform powered by AI-coworkers that work alongside QA teams to simplify testing, accelerate releases and improve quali…...

别再乱升级了!Keil MDK里STM32F4的Pack包版本管理避坑指南
STM32F4开发者的Pack包版本管理终极指南 1. Pack包版本管理的核心挑战 在Keil MDK环境下开发STM32F4系列项目时,Pack包版本管理往往成为工程师们最头疼的问题之一。每次打开工程时,Keil总会"贴心"地提示有新的Pack包可用,但盲目升级…...
)
Vue3数字动画实战:用vue3-count-to打造数据大屏动态效果(附完整代码)
Vue3数字动画实战:用vue3-count-to打造数据大屏动态效果 数据可视化大屏已经成为企业展示核心指标的重要窗口,而动态数字效果则是其中最抓眼球的元素之一。想象一下,当领导带着客户参观时,大屏上的关键数据从0开始流畅增长到百万级…...

BaiduPCS-Go深度调优指南:10个高级配置技巧提升下载速度与稳定性
BaiduPCS-Go深度调优指南:10个高级配置技巧提升下载速度与稳定性 【免费下载链接】BaiduPCS-Go iikira/BaiduPCS-Go原版基础上集成了分享链接/秒传链接转存功能 项目地址: https://gitcode.com/GitHub_Trending/ba/BaiduPCS-Go BaiduPCS-Go作为一款强大的百度…...
)
基本数据结构的定义要自己会手写1(二叉树)
(C版本)struct TreeNode {int val;TreeNode *left;TreeNode *right;// 写三个构造函数,提供多种创建节点的方式// 1、无参构造TreeNode() : val(0),left(nullptr),right(nullptr){}// 2、单参构造TreeNode(int x) : val(x),left(nullptr),rig…...

测试工程师时间管理:从疲于奔命到游刃有余的高效工作法
对于广大软件测试从业者而言,时间似乎总是不够用。凌晨的办公室里,闪烁的报错红光映照着疲惫的脸庞,这并非个别现象,而是许多同行共同的日常写照。在敏捷开发、快速迭代的现代软件工程中,测试团队常常被重复的用例维护…...

STM32F429 HAL库 DMA方式实现SD卡高效存储.csv数据
1. 为什么需要DMA方式存储.csv数据 当你用STM32F429做数据采集时,最头疼的就是CPU被数据传输占满的问题。我去年做工业传感器项目时就遇到过——采集10个通道的模拟量数据,还要实时计算和存储,结果发现光是往SD卡写数据就吃掉了70%的CPU资源。…...

Unity与佳能单反深度集成:拍照控制与实时数据流处理实战
1. 为什么需要Unity与佳能单反集成? 在开发互动应用时,我们经常需要高质量的图像输入。手机摄像头虽然方便,但在画质、光学变焦、景深控制等方面与专业单反相机存在明显差距。我做过一个AR试衣间项目,最初用iPhone摄像头ÿ…...