RANSAC算法
RANSAC简介
RANSAC(RAndom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的数据中正确估计数学模型参数的迭代算法。
“外点”一般指的的数据中的噪声,比如说匹配中的误匹配和估计曲线中的离群点。所以,RANSAC也是一种“外点”检测算法。RANSAC算法是一种不确定算法,它只能在一种概率下产生结果,并且这个概率会随着迭代次数的增加而加大。
- “内群”(inlier, 即正常数据)数据可以通过几组模型的参数来叙述其分布,而“离群”(outlier,似乎译为外点群更加妥当,异常数据)数据则是不适合模型化的数据。
- 数据会受噪声影响,噪声指的是离群,例如从极端的噪声或错误解释有关数据的测量或不正确的假设。
- RANSAC假定,给定一组(通常很小)的内点群,存在一个程序,这个程序可以估算最佳解释或最适用于这一数据模型的参数。
算法基本思想和流程
RANSAC是通过反复选择数据集去估计出模型,一直迭代到估计出认为比较好的模型。
具体的实现步骤可以分为以下几步:
- 选择出可以估计出模型的最小数据集;(对于直线拟合来说就是2个点,对于平面拟合就是3个点)
- 使用这个数据集来计算出数据模型;
- 将所有数据带入这个模型,计算出“内点”的数目;(累加在一定误差范围内的适合当前迭代推出模型的数据)
- 比较当前模型和之前推出的最好的模型的“内点“的数量,记录最大“内点”数的模型参数和“内点”数;
- 重复1-4步,直到迭代结束或者当前模型已经足够好了(“内点数目大于一定数量”)。
RANSAC筛除地面点云
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/segmentation/sac_segmentation.h>int main()
{// 读取点云数据pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::io::loadPCDFile<pcl::PointXYZ>("input_cloud.pcd", *cloud);// 创建地面分割对象pcl::SACSegmentation<pcl::PointXYZ> seg;pcl::PointIndices::Ptr inliers(new pcl::PointIndices);pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);// 设置地面分割参数seg.setOptimizeCoefficients(true);seg.setModelType(pcl::SACMODEL_PLANE);seg.setMethodType(pcl::SAC_RANSAC);seg.setMaxIterations(1000);seg.setDistanceThreshold(0.01);// 执行地面分割seg.setInputCloud(cloud);seg.segment(*inliers, *coefficients);// 创建提取器对象pcl::ExtractIndices<pcl::PointXYZ> extract;pcl::PointCloud<pcl::PointXYZ>::Ptr ground_cloud(new pcl::PointCloud<pcl::PointXYZ>);// 提取地面点云extract.setInputCloud(cloud);extract.setIndices(inliers);extract.setNegative(false);extract.filter(*ground_cloud);// 提取非地面点云pcl::PointCloud<pcl::PointXYZ>::Ptr non_ground_cloud(new pcl::PointCloud<pcl::PointXYZ>);extract.setNegative(true);extract.filter(*non_ground_cloud);// 保存结果pcl::io::savePCDFile<pcl::PointXYZ>("ground_cloud.pcd", *ground_cloud);pcl::io::savePCDFile<pcl::PointXYZ>("non_ground_cloud.pcd", *non_ground_cloud);std::cout << "地面点云保存成功!" << std::endl;return 0;
}相关文章:

RANSAC算法
RANSAC简介 RANSAC(RAndom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的数据中正确估计数学模型参数的迭代算法。 “外点”一般指的的数据中的噪声,比如说匹配中的误匹配和估计曲线中的离群点。所以,RANSAC也是一种“外点”检…...
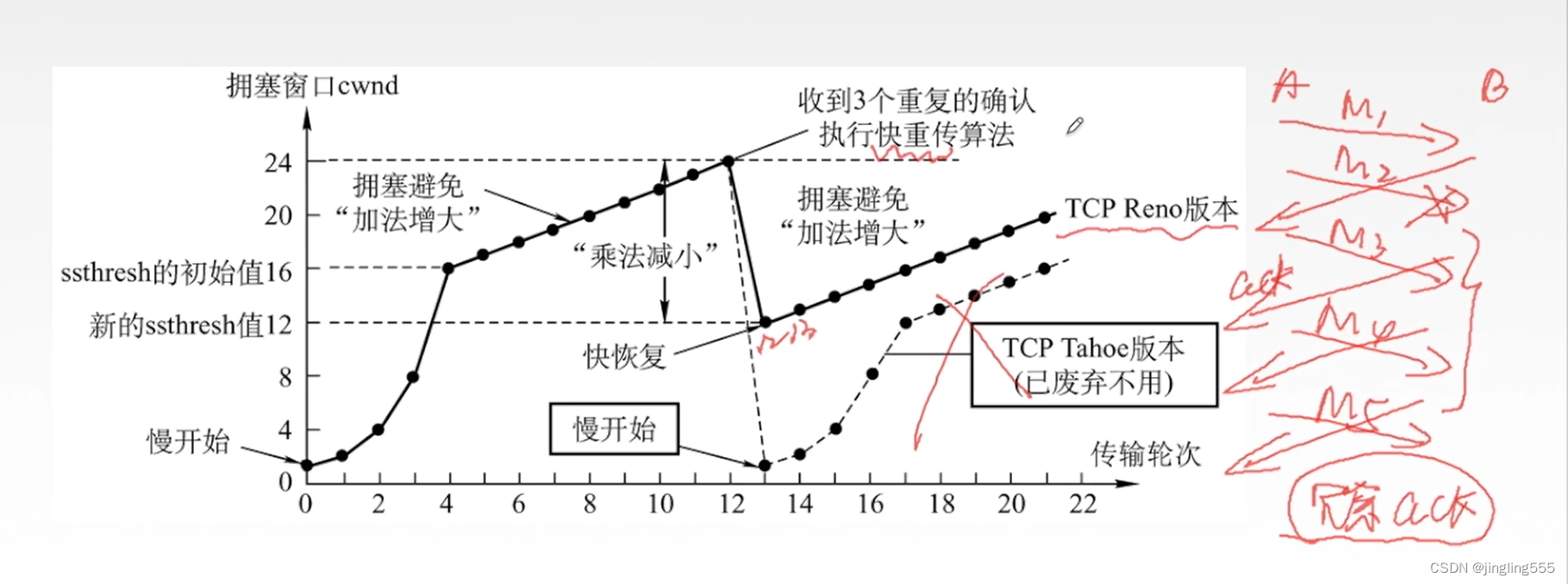
考研408 | 【计算机网络】 传输层
导图 传输层的功能 传输层的两个协议 传输层的寻址与端口 UDP协议 UDP的主要特点 UDP首部格式: UDP校验: TCP协议 TCP协议的特点 TCP报文段首部格式 TCP连接管理 TCP的连接建立 SYN洪泛攻击 TCP的连接释放 TCP可靠传输 序号: 确认࿱…...
)
Redis_缓存3_缓存异常(数据不一致、雪崩、击穿、穿透)
14.6缓存异常 四个方面 缓存中数据和数据库不一致缓存雪崩缓存击穿缓存穿透 14.6.1数据不一致: 一致性包括两种情况 缓存中有数据,需要和数据库值相同缓存中没有数据,数据库中的数据是最新值 如果不符合以上两种情况,则出现…...

谁能讲清楚Spark之与MapReduce的对比
我们已经知道Spark是如何设计和实现数据处理流程的,这里我们 再深入思考一下,为什么Spark能够替代MapReduce成为主流的大数据处理框架呢?对比MapReduce,Spark究竟有哪些优势? 一 优势 1 通用性: 基于函数式编程思想,MapReduce将数据类型抽象为,k,v格式,并将数据处理…...
Android自定义侧滑Item
源码地址:https://github.com/LanSeLianMa/CustomizeView/tree/master/cehuaitem 使用方式一:XML布局中直接使用 <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas.android.com…...

c++11 标准模板(STL)(std::basic_stringbuf)(三)
定义于头文件 <sstream> template< class CharT, class Traits std::char_traits<CharT>, class Allocator std::allocator<CharT> > class basic_stringbuf : public std::basic_streambuf<CharT, Traits> std::basic_stringbuf…...
)
Nodejs 第九章(模块化)
Nodejs 模块化规范遵循两套一 套CommonJS规范另一套esm规范 CommonJS 规范 引入模块(require)支持四种格式 支持引入内置模块例如 http os fs child_process 等nodejs内置模块支持引入第三方模块express md5 koa 等支持引入自己编写的模块 ./ …/ 等支…...
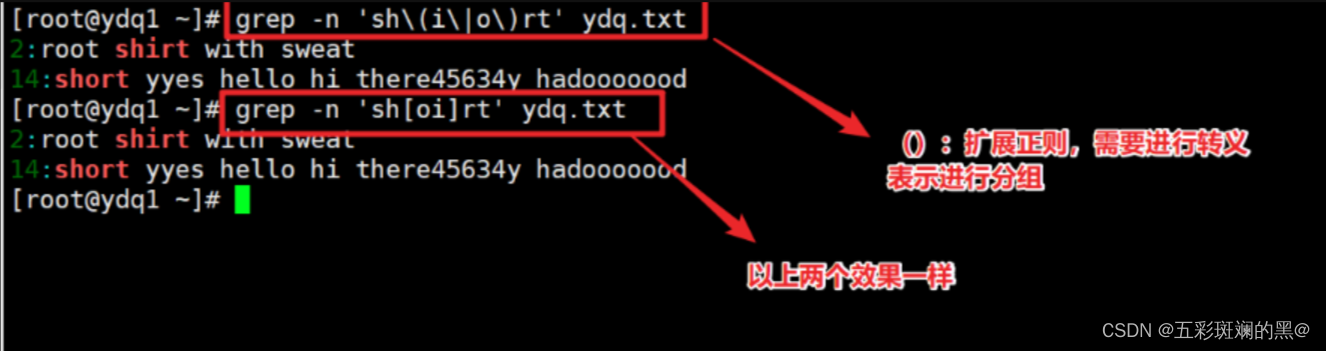
shell之正则表达式及三剑客grep命令
一、正则表达式概述 什么是正则表达式? 正则表达式是一种描述字符串匹配规则的重要工具 1、正则表达式定义: 正则表达式,又称正规表达式、常规表达式 使用字符串描述、匹配一系列符合某个规则的字符串 正则表达式 普通字符: 大小写字母…...

LeetCode 热题 100 JavaScript--33. 搜索旋转排序数组
整数数组 nums 按升序排列,数组中的值 互不相同 。 在传递给函数之前,nums 在预先未知的某个下标 k(0 < k < nums.length)上进行了 旋转,使数组变为 [nums[k], nums[k1], …, nums[n-1], nums[0], nums[1], …,…...
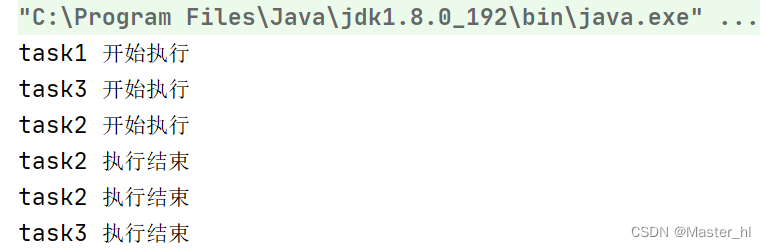
并发编程 - 线程池中的常见面试题
目录 1. 线程池相比于线程有什么优点 2. 线程池的参数有哪些 3. 线程工厂有什么用 4. 说一下线程的优先级 5. 说一下线程池的执行流程 6. 线程池的拒绝策略有哪些 7. 如何实现自定义拒绝策略 8. 如何判断线程池中的任务是否执行完成 1. 线程池相比于线程有什么优点 有…...

将多个单独的 Excel 文件合并成一个,并添加标题行
要将多个单独的 Excel 文件合并成一个,并添加标题行,可以使用 Python 的 pandas 库。以下是一个示例代码,假设要合并的 Excel 文件都在同一个文件夹中: import os import pandas as pd # 指定文件夹路径 folder_path path/to/fo…...

VPN pptp和l2tp协议破解
代码下载地址: https://download.csdn.net/download/m0_37567738/88215516?spm1001.2014.3001.5501...
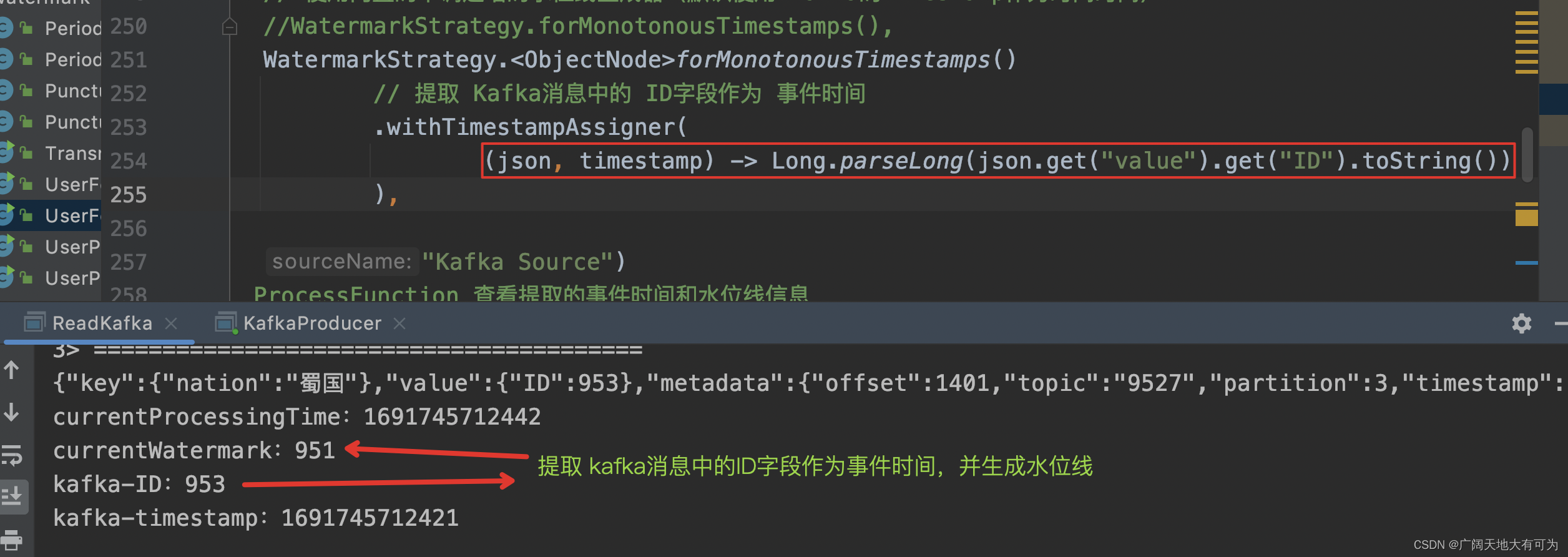
4.3、Flink任务怎样读取Kafka中的数据
目录 1、添加pom依赖 2、API使用说明 3、这是一个完整的入门案例 4、Kafka消息应该如何解析 4.1、只获取Kafka消息的value部分 4.2、获取完整Kafka消息(key、value、Metadata) 4.3、自定义Kafka消息解析器 5、起始消费位点应该如何设置 5.1、earliest() 5.2、lat…...

C语言实例_和校验算法
一、算法介绍 和校验(Checksum)是一种简单的纠错算法,用于检测或验证数据传输或存储过程中的错误。它通过对数据进行计算并生成校验和,然后将校验和附加到数据中,在接收端再次计算校验和并进行比较,以确定…...
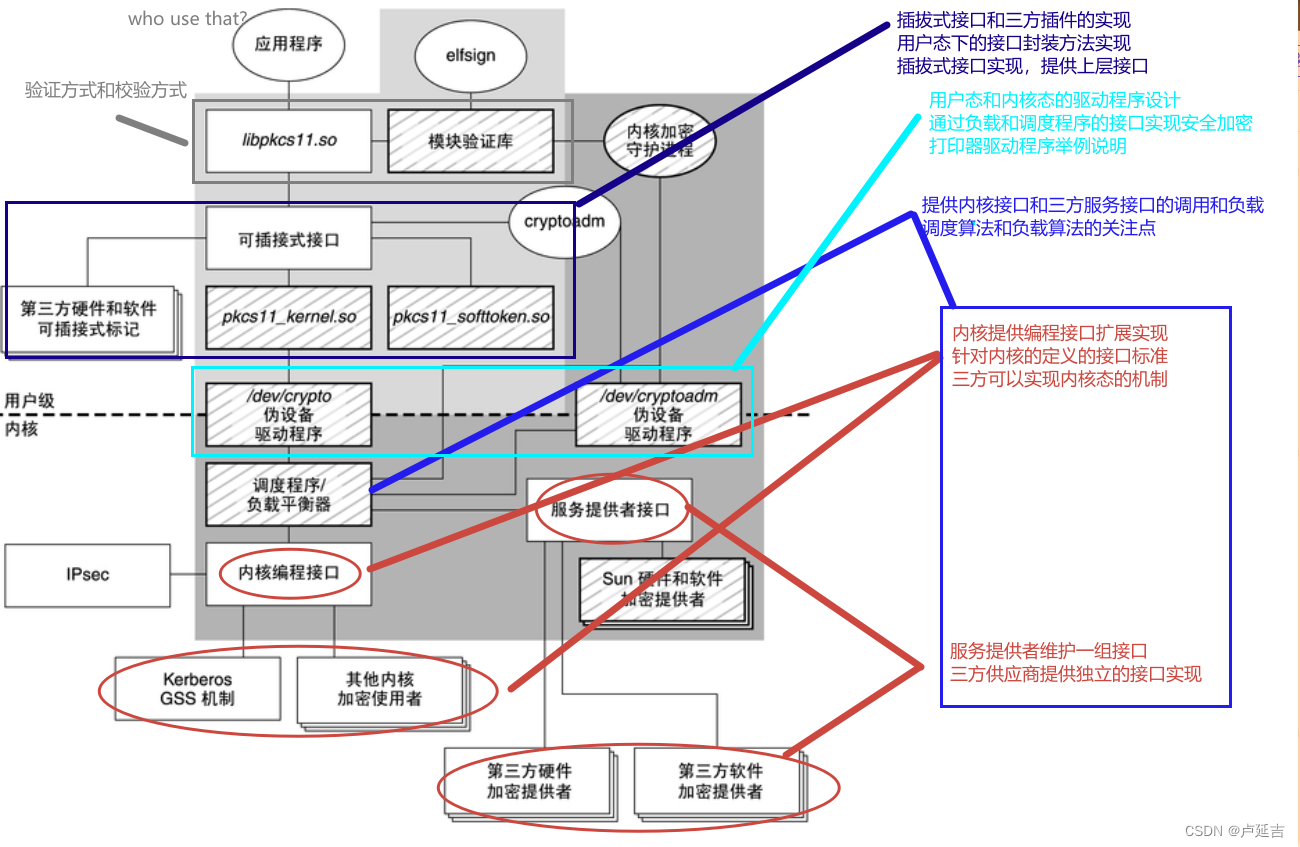
安全加密框架图——Oracle安全开发者
Oracle安全开发者 ACLs 设计 ACLs(访问控制列表)时,可以根据以下思路进行设计: 所有者文件权限:确定文件的所有者能够对文件执行哪些操作,如读取、写入、执行等。这可以根据文件的性质和拥有者的职责来决…...

Android databinding 被多次定义
一、报错: AndroidStudio运行代码时,编译器报 Type androidx.databinding.Bindable is defined multiple times...... 二、解决: 点击 Build -> Clean Project,关闭编译器再打开即可。 三、解决过程: 在使用Andro…...

云原生周刊:Kubernetes v1.28 新特性一览 | 2023.8.14
推荐一个 GitHub 仓库:Fast-Kubernetes。 Fast-Kubernetes 是一个涵盖了 Kubernetes 的实验室(LABs)的仓库。它提供了关于 Kubernetes 的各种主题和组件的详细内容,包括 Kubectl、Pod、Deployment、Service、ConfigMap、Volume、…...

机器学习之分类模型
机器学习之分类模型 概述分类模型逻辑回归最近邻分类朴素贝叶斯支持向量机决策树随机森林多层感知机基于集成学习的分类模型VotingBaggingStackingBlendingBoosting 概述 机器学习分类模型通过训练集进行学习,建立一个从输入空间 X X X到输出空间 Y Y Y(…...

学习Vue:创建第一个Vue实例
当您开始探索 Vue.js,第一步就是创建一个 Vue 实例。Vue 实例是 Vue.js 应用程序的核心构建块,它使您能够将数据与用户界面连接起来,实现动态交互。在本文中,我们将详细介绍如何创建您的第一个 Vue 实例。 步骤1:引入 …...
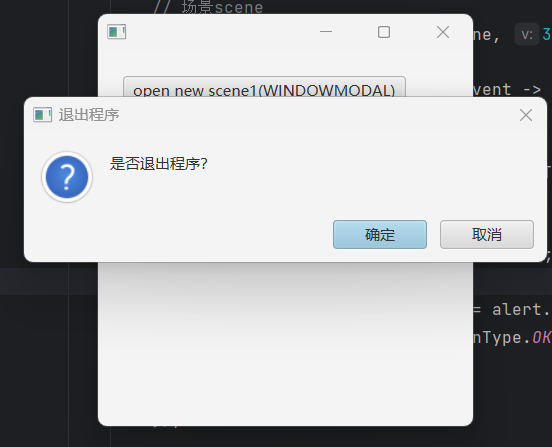
JavaFx基础学习【二】:Stage
一、介绍 窗口Stage为图中标绿部分: 实际为如下部分: 不同的操作系统表现的样式不同,以下都是以Windows操作系统为例,为了使大家更清楚Stage是那部分,直接看以下图,可能更清楚: 有点潦草&…...

基于Arduino与应变片传感器的高精度厨房电子秤DIY全攻略
1. 项目概述:用Arduino打造一台高精度厨房电子秤作为一个喜欢在厨房里折腾的硬件爱好者,我经常遇到需要精确称量食材的场合。市面上的电子秤要么精度不够,要么价格不菲,要么功能单一。于是,我萌生了自己动手做一台的想…...
重构)
嘈杂工业场景下的自适应VAD与双码本声纹识别鉴权系统:基于端侧轻量化神经网络与向量量化(VQ)重构
在大型化工车间、能源集控中心以及金融极密隔离库房中,离线声纹识别是物理访问控制和身份安全核验的重要生物特征屏障。然而,在环境本底噪声高达80dB以上的恶劣工业场景下,常规的语音活动检测(VAD)会频繁误触ÿ…...

组态王通用扫码枪配置
使用组态王扫码枪驱动,是绑定变量,扫码后直接就可以显示扫码内容。解决每次扫码输入数据时必须先用鼠标点进输入框内的问题。驱动安装先添加驱动,亚控网站的文件为 barcodescanner,这个文件是组态王通用扫码枪的驱动,但…...

如何高效批量下载音乐歌词:智能歌词管理完整指南
如何高效批量下载音乐歌词:智能歌词管理完整指南 【免费下载链接】ZonyLrcToolsX ZonyLrcToolsX 是一个能够方便地下载歌词的小软件。 项目地址: https://gitcode.com/gh_mirrors/zo/ZonyLrcToolsX ZonyLrcToolsX 是一款专业的跨平台歌词下载工具,…...

使用TaotokenCLI工具一键配置开发环境中的API密钥
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken CLI工具一键配置开发环境中的API密钥 在团队协作或个人开发中,为每个项目或成员手动配置大模型API密钥和…...

Jupyter Notebook里跑argparse脚本总报错?一个空列表参数搞定ipykernel_launcher.py error
Jupyter Notebook中argparse报错的终极解决方案:空列表参数实战解析在数据科学和机器学习的工作流中,Jupyter Notebook因其交互式特性成为众多研究者的首选工具。然而,当我们尝试在Notebook中运行那些原本为命令行设计的Python脚本时…...

Matlab,plot绘图如何添加边框
matlab生成的图——编辑(E)——坐标区属性(A)——框样式——Box,勾选效果:...

航空发动机叶片三维扫描-诺斯顿
航空发动机叶片作为发动机的核心动力部件,其精度与性能直接决定发动机的推力、燃油效率及运行安全性,三维扫描技术作为航空制造领域的核心数字化手段,已广泛应用于叶片全生命周期的多个关键环节。其应用涵盖叶片研发设计阶段的逆向工程&#…...

yolo视频识别 车辆速度估计识别 yolo11视频实时速度测量与测速估计
文章目录YOLOv11:视频实时速度测量与测速估计一、YOLOv11概述二、速度测量原理三、距离测量方法四、应用场景五、实践案例以下是关于使用YOLOv11进行视频实时速度测量与测速估计的介绍: YOLOv11:视频实时速度测量与测速估计 随着计算机视觉…...

Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现
Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现 【免费下载链接】vue2-verify vue的验证码插件 项目地址: https://gitcode.com/gh_mirrors/vu/vue2-verify 在当今Web应用开发中,验证码作为防止自动化攻击的关键安全组件&…...