OPENCV C++(十一)
鼠标响应函数
//鼠标响应函数
void on_mouse(int EVENT, int x, int y, int flags, void* userdata)
{Mat hh;hh = *(Mat*)userdata;switch (EVENT){case EVENT_LBUTTONDOWN:{vP.x = x;vP.y = y;drawMarker(hh, vP, Scalar(255, 255, 255));//circle(hh, vP, 4, cvScalar(255, 255, 255), -1);imshow(wName, hh);return;}break;}}drawMarker(hh, vP, Scalar(255, 255, 255));
这个是画一个十字符号 标记一个点
绘制直方图和以前篇幅一样
//绘制直方图
int drawHist(cv::Mat& histMat, float* srcHist, int bin_width, int bin_heght)
{histMat.create(bin_heght, 256 * bin_width, CV_8UC3);histMat = Scalar(255, 255, 255);float maxVal = *std::max_element(srcHist, srcHist + 256);for (int i = 0; i < 256; i++) {Rect binRect;binRect.x = i * bin_width;float height_i = (float)bin_heght * srcHist[i] / maxVal;binRect.height = (int)height_i;binRect.y = bin_heght - binRect.height;binRect.width = bin_width;rectangle(histMat, binRect, CV_RGB(255, 0, 0), -1);}return 0;
}统计视频一个点不受大影响的时候直方图是高斯分布的(灰度)
int index = grayMat.at<uchar>(vP.y, vP.x);选取刚才选中的点
histgram[index]++;在对应的直方图加1
drawHist(histMat, histgram, bin_width, bin_heght);drawMarker(frame, vP, Scalar(255, 255, 255));这里还要画一个drawmaker因为第二遍就不会调用了
vp要是全局变量
完整代码:
int main() {// 验证某一背景像素值呈高斯分布VideoCapture cap(0);int cnt = 0;float histgram[256] = { 0 };Mat histMat;int bin_width = 3;int bin_heght = 100;while (1){Mat frame;Mat grayMat;cap >> frame;if (cnt == 0){Mat selectMat;frame.copyTo(selectMat);imshow(wName, selectMat);setMouseCallback(wName, on_mouse, &selectMat);waitKey(0);destroyAllWindows();}cvtColor(frame, grayMat, COLOR_BGR2GRAY);int index = grayMat.at<uchar>(vP.y, vP.x);histgram[index]++;drawHist(histMat, histgram, bin_width, bin_heght);drawMarker(frame, vP, Scalar(255, 255, 255));imshow("frame", frame);imshow("histMat", histMat);if (waitKey(30) == 27) {destroyAllWindows();break;}cnt++;}
return 0;
}当然还有一些变量需要自己设置全局变量
直接拿原图和新图直接做差分
VideoCapture cap(0);int cnt = 0;Mat frame;while (1) {cap>> frame;cvtColor(frame, frame, COLOR_BGR2GRAY);if (cnt == 0) {//第一帧,获得背景图像frame.copyTo(bgMat);}else {//第二帧开始背景差分//背景图像和当前图像相减absdiff(frame, bgMat, subMat);//差分结果二值化namedWindow("Result", WINDOW_AUTOSIZE);//滑动条创建cv::createTrackbar("threshold", "Result", &sub_threshold, 255, threshold_track);threshold_track(0, 0);imshow("frame", frame);}if (waitKey(30) == 27) {destroyAllWindows();break;}cnt++;}其中
absdiff(frame, bgMat, subMat);如果摄像机是固定的,那么我们可以认为场景(背景)大多数情况下是不变的,而只有前景(被跟踪的目标)会运动,这样就可以建立背景模型。通过比较当前帧和背景模型,就能轻松地跟踪目标运动情况了。这里,最容易想到的比较方式就是当前帧减去背景模型了
将差分的图像二值化 这里创建了滑动条 bar
void threshold_track(int, void*)//这里就是定义的一个回调函数,里面是canny相关的操作
{threshold(subMat, bny_subMat, sub_threshold, 255, CV_THRESH_BINARY);imshow("Result", bny_subMat);
}运用了高斯差分 因为本身图像的点都符合高斯分布,收光照等等影响,而这些都不能被考虑进移动物
int nBg = 200; cap >> frame;cvtColor(frame, frame, COLOR_BGR2GRAY);if (cnt <= nBg) {srcMats.push_back(frame);if (cnt == 0) {std::cout << "--- reading frame --- " << std::endl;}else {std::cout << "-";if (cnt % 50 == 0)std::cout << std::endl;}}这里是前200张帧是为了获取高斯分布
计算图像的平均值和方差(灰度)
int calcGaussianBackground(std::vector<cv::Mat> srcMats, cv::Mat& meanMat, cv::Mat& varMat)
{int rows = srcMats[0].rows;int cols = srcMats[0].cols;for (int h = 0; h < rows; h++){for (int w = 0; w < cols; w++){int sum = 0;float var = 0;//求均值for (int i = 0; i < srcMats.size(); i++) {sum += srcMats[i].at<uchar>(h, w);}meanMat.at<uchar>(h, w) = (uchar)(sum / srcMats.size());//求方差for (int i = 0; i < srcMats.size(); i++) {var += (float)pow((srcMats[i].at<uchar>(h, w) - meanMat.at<uchar>(h, w)), 2);}varMat.at<float>(h, w) = var / srcMats.size();}}return 0;
}利用平均值和方差来判断是否是入侵背景的前景
int gaussianThreshold(cv::Mat srcMat, cv::Mat meanMat, cv::Mat varMat, float weight, cv::Mat& dstMat)
{int rows = srcMat.rows;int cols = srcMat.cols;for (int h = 0; h < rows; h++){for (int w = 0; w < cols; w++){int dif = abs(srcMat.at<uchar>(h, w) - meanMat.at<uchar>(h, w));int th = (int)(weight * varMat.at<float>(h, w));if (dif > th) {dstMat.at<uchar>(h, w) = 255;}else {dstMat.at<uchar>(h, w) = 0;}}}return 0;
}这里的weight是权重,可以代表差异到什么程度就是前景
完整代码:
VideoCapture cap(0);std::vector<cv::Mat> srcMats;int nBg = 200; float wVar = 3;int cnt = 0;bool calcModel = true;cv::Mat frame;cv::Mat meanMat;cv::Mat varMat;cv::Mat dstMat;while (1){cap >> frame;cvtColor(frame, frame, COLOR_BGR2GRAY);if (cnt <= nBg) {srcMats.push_back(frame);if (cnt == 0) {std::cout << "--- reading frame --- " << std::endl;}else {std::cout << "-";if (cnt % 50 == 0)std::cout << std::endl;}}else {if (calcModel) {std::cout << std::endl << "calculating background models" << std::endl;//计算模型meanMat.create(frame.size(), CV_8UC1);varMat.create(frame.size(), CV_32FC1);//调用计算模型函数calcGaussianBackground(srcMats, meanMat, varMat);}calcModel = false;//背景差分dstMat.create(frame.size(), CV_8UC1);//利用均值mat和方差mat,计算差分gaussianThreshold(frame, meanMat, varMat, wVar, dstMat);imshow("result", dstMat);imshow("frame", frame);}if (waitKey(30) == 27) {destroyAllWindows();break;}cnt++;}opencv自带的背景差分方式
// OPENCV的自带背景差分方式VideoCapture cap(0); Mat inputFrame, frame, foregroundMask, foreground, background;int method = 0;Ptr<BackgroundSubtractor> model;if (method == 0) {model = createBackgroundSubtractorKNN();}else if (method == 1) {model = createBackgroundSubtractorMOG2();}else {cout << "Can not create background model using provided method: '" << method << "'" << endl;}bool doUpdateModel = true;bool doSmoothMask = false;while (1) {cap >> frame;model->apply(frame, foregroundMask, doUpdateModel ? -1 : 0);imshow("image", frame);if (doSmoothMask){GaussianBlur(foregroundMask, foregroundMask, Size(11, 11), 3.5, 3.5);threshold(foregroundMask, foregroundMask, 10, 255, THRESH_BINARY);}if (foreground.empty())foreground.create(frame.size(), frame.type());foreground = Scalar::all(0);frame.copyTo(foreground, foregroundMask);imshow("foreground mask", foregroundMask);imshow("foreground image", foreground);model->getBackgroundImage(background);if (!background.empty())imshow("mean background image", background);const char key = (char)waitKey(30);if (key == 27 || key == 'q') // ESC{cout << "Exit requested" << endl;break;}else if (key == ' '){doUpdateModel = !doUpdateModel;cout << "Toggle background update: " << (doUpdateModel ? "ON" : "OFF") << endl;}else if (key == 's'){doSmoothMask = !doSmoothMask;cout << "Toggle foreground mask smoothing: " << (doSmoothMask ? "ON" : "OFF") << endl;}}return 0;
}S是是否平滑 会用高斯滤波来平滑图像
空格是是否更新背景
目前不是太懂这里的代码 希望后续学到这里后会明白
相关文章:
)
OPENCV C++(十一)
鼠标响应函数 //鼠标响应函数 void on_mouse(int EVENT, int x, int y, int flags, void* userdata) {Mat hh;hh *(Mat*)userdata;switch (EVENT){case EVENT_LBUTTONDOWN:{vP.x x;vP.y y;drawMarker(hh, vP, Scalar(255, 255, 255));//circle(hh, vP, 4, cvScalar(255, 255…...

ES使用心得
客户端 Transport Client已经快要废弃了,官方推荐使用High Level REST Client。 常用命令 启停 systemctl start elasticsearch systemctl stop elasticsearch节点状态 curl http://myservice1:9200/_cat/nodes?vip heap.percent ram.percent cpu l…...

Stable Diffusion - 幻想 (Fantasy) 风格与糖果世界 (Candy Land) 人物提示词配置
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://spike.blog.csdn.net/article/details/132212193 图像由 DreamShaper8 模型生成,融合糖果世界。 幻想 (Fantasy) 风格图像是一种以想象力为主导的艺术形式,创造了…...

部署K8S集群
目录 一、环境搭建 1、准备环境 2、安装master节点 3、安装k8s-master上的node 4、安装配置k8s-node1节点 5、安装k8s-node2节点 6、为所有node节点配置flannel网络 7、配置docker开启加载防火墙规则允许转发数据 二、k8s常用资源管理 1、创建一个pod 2、pod管理 一、…...

在时间和频率域中准确地测量太阳黑子活动及使用信号处理工具箱(TM)生成广泛的波形,如正弦波、方波等研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

一百五十四、Kettle——Linux上安装Kettle9.3(踩坑,亲测有效,附截图)
一、目的 由于kettle8.2在Linux上安装后,共享资源库创建遇到一系列问题,所以就换成kettle9.3 二、kettle版本以及安装包网盘链接 kettle9.3.0安装包网盘链接 链接:https://pan.baidu.com/s/1MS8QBhv9ukpqlVQKEMMHQA?pwddqm0 提取码&…...
PackageNotFoundError: No package metadata was found for bitsandbytes解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。现为CSDN博客专家、人工智能领域优质创作者。喜欢通过博客创作的方式对所学的…...

uni-app和springboot完成前端后端对称加密解密流程
概述 使用对称加密的方式实现。前端基于crypto-js。uni-app框架中是在uni.request的基础上,在拦截器中处理的。springboot在Filter中完成解密工作。 uni-app 项目中引入crypto-js。 npm install crypto-js加密方法 const SECRET_KEY CryptoJS.enc.Utf8.parse(…...

【Unity造轮子】制作一个简单的2d抓勾效果(类似蜘蛛侠的技能)
前言 欢迎阅读本文,本文将向您介绍如何使用Unity游戏引擎来实现一个简单而有趣的2D抓勾效果,类似于蜘蛛侠的独特能力。抓勾效果是许多动作游戏和平台游戏中的常见元素,给玩家带来了无限的想象和挑战。 不需要担心,即使您是一…...
)
Unity 人物连招(三段连击)
一: 连招思路 首先人物角色上有三个攻击实例对象 Damage,每一个damage定义了攻击的伤害值,攻击距离,触发器名称,伤害的发起者,攻击持续时间,攻击重置时间,伤害的碰撞框大小等字段: …...

关于WSL以及docker连接adb的坑
结论 WSL可以连接到adb,需要和主机保持一致的adb型号。主机是windows还是macOS的docker没法直接连接到adb设备,只有主机为Linux才可以。其他平台只能通过TCP网络协议。 具体过程 关于WSL连接adb设备 windows安装adb工具(安装可以去官网下…...
python安装第三方包时报错:...\lib\site-packages\pip\_vendor\urllib3\response.py...
安装redis第三方包: pip install redis报错现象: 解决方法:使用以下命令可成功安装 pip install redis -i http://pypi.douban.com/simple --trusted-host pypi.douban.com...

腾讯云从业者认证考试考点——云存储产品
文章目录 存储产品功能云存储产品概述存储产品存储网关存储服务 存储分类按存储方式分按存储频率分 云存储与传统存储的区别功能需求性能需求容量扩展数据共享 云硬盘CBS产品概述归档存储和文件存储归档存储CAS文件存储CFS 对象存储存储网关存储网关的分类 云数据迁移CDM日志服…...

猿辅导Motiff与IXDC达成战略合作,将在UI设计领域推动AI革新更多可能性
近日,“IXDC 2023国际体验设计大会”在北京国家会议中心拉开序幕,3000设计师、1000企业、200全球商业领袖,共襄为期5天的用户体验创新盛会。据了解,此次大会是以“设计领导力”为主题,分享全球设计、科技、商业的前沿趋…...

条件操作符(三目操作符)
比如之前我们想写一个条件判断表达式是这样写的: 用操作符就可以这样写: 应用,比如求两个数的最大值...
Unity开发Vision Pro——FAQ)
(五)Unity开发Vision Pro——FAQ
常见问题 (FAQ) 1.问:我看到在visionOS 模拟器中运行的结果与在硬件上运行的结果不同 请注意,在模拟器中运行时,某些特定于硬件的功能不可用 - 最明显的是 AR 数据。这可能意味着 VisionOS 模拟器中的模拟结果可能与 Vision Pro 耳机上的模…...
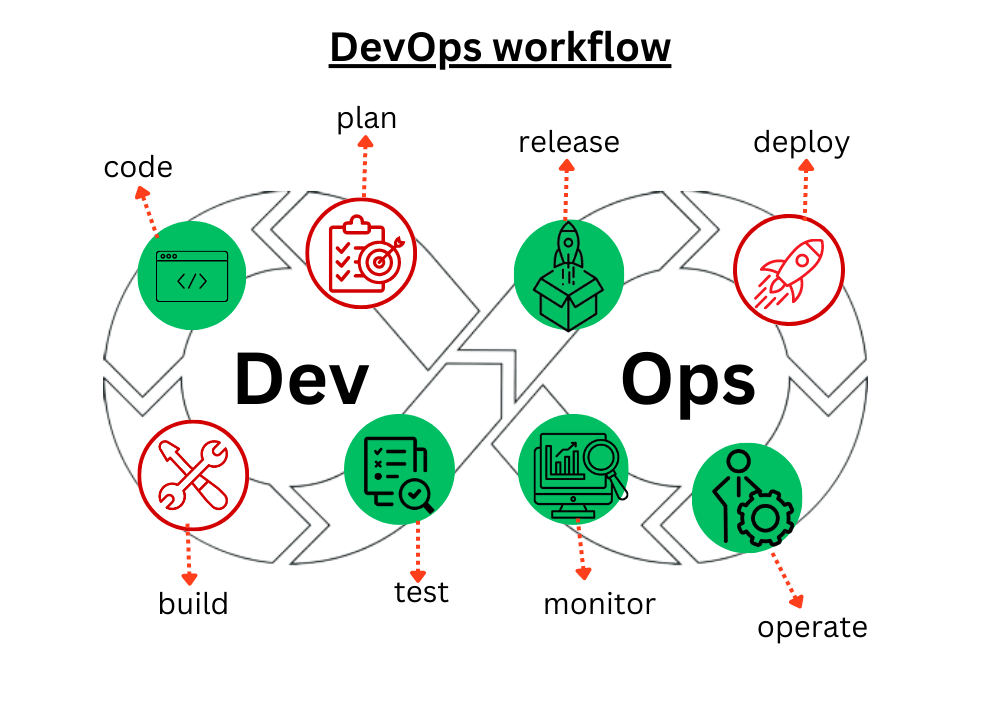
GitOps 与 DevOps:了解关键差异,为企业做出最佳选择
在软件开发领域,GitOps 和 DevOps 是加强协作和实现软件交付流程自动化的重要技术。虽然这两种模式都旨在提高软件开发生命周期的效率,但它们的核心原则和实施方式却各不相同。 本篇文章将帮助您了解 GitOps 和 DevOps 之间的差异、它们的工作流程&am…...

Java实现Word文档转PDF,PDF转Word,PDF转Excel,PDF转换工具
前言 java实现word文档转PDF,PDF转word 解决只能转换4页问题 解决每页头部存在水印问题 实现 引入依赖 <dependency><groupId>com.documents4j</groupId><artifactId>documents4j-local</artifactId><version>1.0.3</ve…...
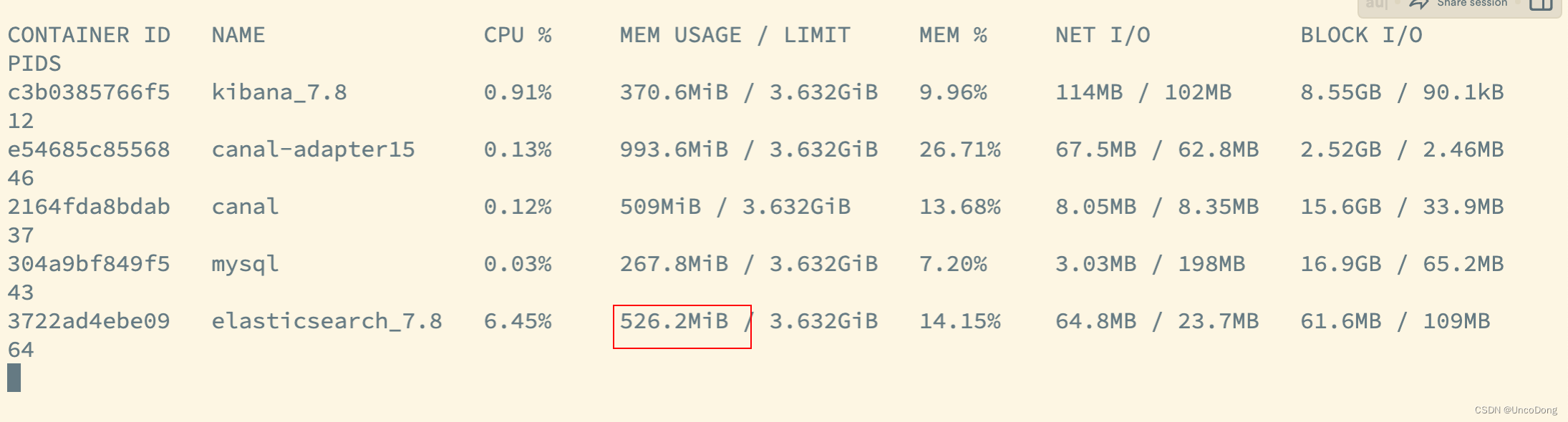
Docker部署ES服务,全量同步的时候内存爆炸,ES自动关闭,CPU100%
问题 使用canal-adapter全量同步(参考Canal Adapter1.1.5版本API操作服务,手动同步数据(4))的时候 小批量数据可以正常运行(几千条)只要数据量一大(上万条),…...

Python——添加照片边框
原图: 添加边框后: 添加边框会读取照片的exif信息如时间、相机型号、品牌以及快门焦段等信息,将他们显示在下面的边框中。 获取当前py文件路径 import os #get path that py file located def Get_Currentpath():file_path os.path.abspa…...

三步实现跨架构程序兼容:Box64高效架构转换指南
三步实现跨架构程序兼容:Box64高效架构转换指南 【免费下载链接】box64 Box64 - Linux Userspace x86_64 Emulator with a twist, targeted at ARM64, RV64 and LoongArch Linux devices 项目地址: https://gitcode.com/gh_mirrors/bo/box64 你是否曾在ARM64…...

从CTF题看RSA安全:为什么你的密钥不能‘共享素数’?
从CTF实战看RSA密钥安全:那些年我们踩过的坑 在网络安全竞赛和实际渗透测试中,RSA算法的错误实现方式往往成为突破的关键点。本文将通过典型CTF赛题案例,揭示五种常见RSA实现漏洞背后的数学原理和安全启示,帮助开发者在实际项目中…...

基于ESP32的智能电池充电器设计:多化学体系支持与模块化架构
1. 项目概述:打造一台全能的“电池医生”手头攒了一堆不同化学体系的电池,从航模用的4S锂聚合物电池,到应急灯里的12V铅酸电池,再到各种工具里的镍氢、锂离子电池,每次充电都得翻出好几个不同的充电器,桌面…...

光轮智能 谢晨 访谈总结机器人仿真数据产业
光轮智能 谢晨 访谈总结机器人仿真关于创始人关于数据数据金字塔数据痛点仿真数据的重要性仿真数据的质量b站链接地址公司官网关于创始人 清华物理;哥伦比亚金融;英伟达智驾仿真;小鹏智驾仿真;现为光轮智能CEO 关于数据 数据的…...

如何快速上手DeepPurpose?5分钟完成你的第一个药物-靶点相互作用预测模型
如何快速上手DeepPurpose?5分钟完成你的第一个药物-靶点相互作用预测模型 【免费下载链接】DeepPurpose A Deep Learning Toolkit for DTI, Drug Property, PPI, DDI, Protein Function Prediction (Bioinformatics) 项目地址: https://gitcode.com/gh_mirrors/de…...

Taotoken的审计日志功能为企业API安全与合规管理提供支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的审计日志功能为企业API安全与合规管理提供支持 当企业决定将大模型能力集成到内部业务流程中时,IT管理员和安…...

Noto字体终极指南:告别“豆腐块“,让全球文字清晰显示
Noto字体终极指南:告别"豆腐块",让全球文字清晰显示 【免费下载链接】noto-fonts Noto fonts, except for CJK and emoji 项目地址: https://gitcode.com/gh_mirrors/no/noto-fonts 在数字世界中,你是否经常看到那些令人困…...

ncmdumpGUI终极指南:深度解析网易云音乐NCM加密文件转换技术
ncmdumpGUI终极指南:深度解析网易云音乐NCM加密文件转换技术 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI ncmdumpGUI是一款专为Windows平台设计…...

Armv9-A架构解析:SVE/SME与安全增强技术
1. Armv9-A架构演进与核心特性全景Armv9-A架构代表了Arm公司面向未来十年计算需求的设计哲学,其核心在于三个维度的突破:性能、安全与专用计算。作为长期从事Arm架构开发的工程师,我见证了从Armv7到Armv9的技术跃迁。与固定宽度向量指令的NEO…...
如何在macOS上免费安装HSTracker:终极炉石传说套牌追踪器完整指南
如何在macOS上免费安装HSTracker:终极炉石传说套牌追踪器完整指南 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 还在为炉石传说对局中记不住对手出牌而烦恼…...