【设备树笔记整理4】内核对设备树的处理
1 从源头分析_内核head.S对dtb的简单处理
1.1 bootloader向内核传递的参数
(1)bootloader启动内核时,会设置r0,r1,r2三个寄存器:
- r0一般设置为0;
- r1一般设置为machine_id (在使用设备树时该参数没有被使用);
- r2一般设置ATAGS或DTB的开始地址
(2)bootloader给内核传递的参数时有2种方法:ATAGS 或 DTB
对于ATAGS传参方法, 可以参考"毕业班视频-自己写bootloader"
从www.100ask.net下载页面打开百度网盘,
打开如下目录:
100ask分享的所有文件
006_u-boot_内核_根文件系统(新1期_2期间的衔接)
视频
第002课_从0写bootloader_更深刻理解bootloader
(3)补充:machine_id(在以前不使用设备树的内核版本中使用该参数)
1.2 内核的启动流程相关
linux内核的入口是 arch/arm/kernel/head.S 文件中的 stext 函数。
1.3 内核head.S/head-common.S文件简要分析
(1)__lookup_processor_type : 使用汇编指令读取CPU ID, 根据该ID找到对应的proc_info_list结构体(里面含有这类CPU的初始化函数、信息)
(2)__vet_atags : 判断是否存在可用的ATAGS或DTB
(3)__create_page_tables : 创建页表, 即创建虚拟地址和物理地址的映射关系
(4)__enable_mmu : 使能MMU, 以后就要使用虚拟地址了
(5)__mmap_switched : 上述函数里将会调用__mmap_switched
(6)把bootloader传入的r2参数, 保存到变量__atags_pointer中
(7)调用C函数start_kernel
1.4 小结
在head.S/head-common.S文件中和设备树相关的处理:
- 把bootloader传来的r1值, 赋给了C变量: __machine_arch_type
- 把bootloader传来的r2值, 赋给了C变量: __atags_pointer // dtb首地址
2 对设备树中平台信息的处理
2.1 函数调用过程
start_kernel // init/main.csetup_arch(&command_line); // arch/arm/kernel/setup.cmdesc = setup_machine_fdt(__atags_pointer); // arch/arm/kernel/devtree.cearly_init_dt_verify(phys_to_virt(dt_phys) // 判断是否有效的dtb, drivers/of/ftd.cinitial_boot_params = params;mdesc = of_flat_dt_match_machine(mdesc_best, arch_get_next_mach); // 找到最匹配的machine_desc, drivers/of/ftd.cwhile ((data = get_next_compat(&compat))) {score = of_flat_dt_match(dt_root, compat);if (score > 0 && score < best_score) {best_data = data;best_score = score;}}2.1.1 函数static inline void *phys_to_virt(phys_addr_t x)
该函数用于将物理地址x转换为虚拟地址后返回。
2.1.2 函数bool early_init_dt_verify(void *params);
该函数用来检查地址parms头部中的magic的值来判断该地址是否为dtb文件的地址,如果是,则返回真,并把dtb文件的地址赋给全局变量initial_boot_params。
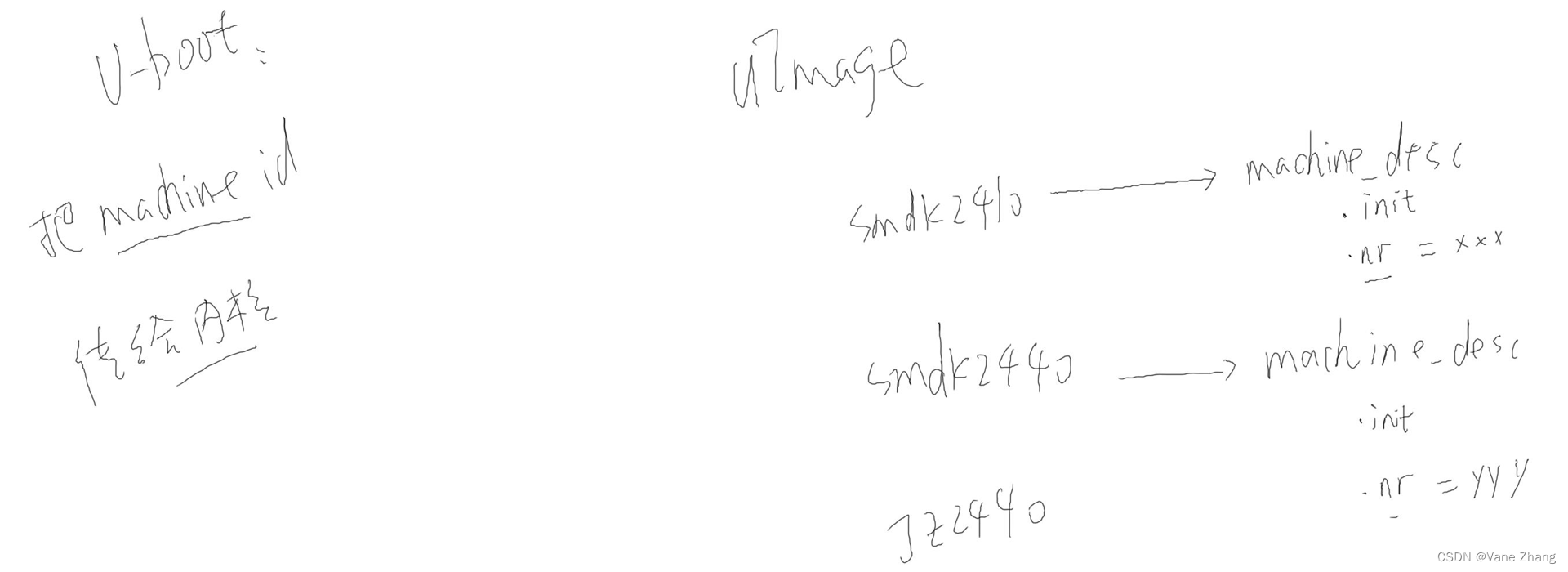
2.1.3 函数of_flat_dt_match_machine()
(1)设备树根节点的compatible属性列出了一系列的字符串,表示它兼容的单板名,从"最兼容"到次之。
(2)内核中有多个machine_desc,其中有dt_compat成员, 它指向一个字符串数组,里面表示该machine_desc支持哪些单板。
(3)使用compatile属性的值,跟每一个machine_desc.dt_compat比较,成绩为"吻合的compatile属性值的位置",成绩越低越匹配, 对应的machine_desc即被选中。
2.2 小结
在start_kernel函数中根据设备树文件为kernel选择合适的machine_desc。
3 对设备树中运行时配置信息的处理
3.1 函数调用过程:
start_kernel // init/main.csetup_arch(&command_line); // arch/arm/kernel/setup.cmdesc = setup_machine_fdt(__atags_pointer); // arch/arm/kernel/devtree.cearly_init_dt_scan_nodes(); // drivers/of/ftd.c/* Retrieve various information from the /chosen node */of_scan_flat_dt(early_init_dt_scan_chosen, boot_command_line);/* Initialize {size,address}-cells info */of_scan_flat_dt(early_init_dt_scan_root, NULL);/* Setup memory, calling early_init_dt_add_memory_arch */of_scan_flat_dt(early_init_dt_scan_memory, NULL);3.2 关于chosen结点
chosen {bootargs = "noinitrd root=/dev/mtdblock4 rw init=/linuxrc console=ttySAC0,115200";};chosen结点中的bootargs参数保存内核启动时的命令行参数,其中:
(1)"root=/dev/mtdblock4" 指定根文件系统的位置
(2)"init=/linuxrc" 指定了第一个运行的应用程序是哪个
(3)"console=ttySAC0,115200" 指定内核的打印信息通过哪个设备进行输出
3.3 小结
(1)/chosen节点中bootargs属性的值, 存入全局变量: boot_command_line
(2)确定根节点的这2个属性的值: #address-cells, #size-cells
分别存入全局变量: dt_root_addr_cells, dt_root_size_cells
(3)解析/memory中的reg属性, 提取出"base, size", 最终调用memblock_add(base, size);
4 dtb转换为device_node
4.1 图示


4.2 函数调用过程
start_kernel // init/main.csetup_arch(&command_line); // arch/arm/kernel/setup.carm_memblock_init(mdesc); // arch/arm/kernel/setup.cearly_init_fdt_reserve_self();/* Reserve the dtb region */// 把DTB所占区域保留下来, 即调用: memblock_reserveearly_init_dt_reserve_memory_arch(__pa(initial_boot_params),fdt_totalsize(initial_boot_params),0); early_init_fdt_scan_reserved_mem(); // 根据dtb中的memreserve信息, 调用memblock_reserveunflatten_device_tree(); // arch/arm/kernel/setup.c__unflatten_device_tree(initial_boot_params, NULL, &of_root,early_init_dt_alloc_memory_arch, false); // drivers/of/fdt.c/* First pass, scan for size */size = unflatten_dt_nodes(blob, NULL, dad, NULL);/* Allocate memory for the expanded device tree */mem = dt_alloc(size + 4, __alignof__(struct device_node));/* Second pass, do actual unflattening */unflatten_dt_nodes(blob, mem, dad, mynodes);populate_nodenp = unflatten_dt_alloc(mem, sizeof(struct device_node) + allocl,__alignof__(struct device_node));np->full_name = fn = ((char *)np) + sizeof(*np);populate_propertiespp = unflatten_dt_alloc(mem, sizeof(struct property),__alignof__(struct property));pp->name = (char *)pname;pp->length = sz;pp->value = (__be32 *)val;4.3 函数详细说明
(1)在DTB文件中,
每一个节点都以TAG(FDT_BEGIN_NODE, 0x00000001)开始, 节点内部可以嵌套其他节点,
每一个属性都以TAG(FDT_PROP, 0x00000003)开始
(2)每一个节点都转换为一个device_node结构体:
struct device_node {const char *name; // 来自节点中的name属性, 如果没有该属性, 则设为"NULL"const char *type; // 来自节点中的device_type属性, 如果没有该属性, 则设为"NULL"phandle phandle;const char *full_name; // 节点的名字, node-name[@unit-address]struct fwnode_handle fwnode;struct property *properties; // 节点的属性struct property *deadprops; /* removed properties */struct device_node *parent; // 节点的父亲struct device_node *child; // 节点的孩子(子节点)struct device_node *sibling; // 节点的兄弟(同级节点)#if defined(CONFIG_OF_KOBJ)struct kobject kobj;#endifunsigned long _flags;void *data;#if defined(CONFIG_SPARC)const char *path_component_name;unsigned int unique_id;struct of_irq_controller *irq_trans;#endif
};(3)device_node结构体中有properties, 用来表示该节点的属性
每一个属性对应一个property结构体:
struct property {char *name; // 属性名字, 指向dtb文件中的字符串int length; // 属性值的长度void *value; // 属性值, 指向dtb文件中value所在位置, 数据仍以big endian存储struct property *next;#if defined(CONFIG_OF_DYNAMIC) || defined(CONFIG_SPARC)unsigned long _flags;#endif#if defined(CONFIG_OF_PROMTREE)unsigned int unique_id;#endif#if defined(CONFIG_OF_KOBJ)struct bin_attribute attr;#endif};(4)这些device_node构成一棵树, 根节点为: of_root
5 device_node转换为platform_device
设备树转换过程:dts -> dtb -> device_node -> platform_device
5.1 哪些device_node可以转换为platform_device
5.1.1 并非所有的device_node都会转换为platform_device,只有以下的device_node会转换:
- 根节点下含有compatile属性的子节点
- 含有特殊compatible属性的节点的子节点(子节点必须含有compatible属性):这些特殊的compatilbe属性为: "simple-bus","simple-mfd","isa","arm,amba-bus"
5.1.2 分析如下设备树文件,观察哪些结点可以转换为 platform_device:
/dts-v1/;/ {model = "SMDK24440";compatible = "samsung,smdk2440";#address-cells = <1>;#size-cells = <1>;memory@30000000 {device_type = "memory";reg = <0x30000000 0x4000000>;};chosen {bootargs = "noinitrd root=/dev/mtdblock4 rw init=/linuxrc console=ttySAC0,115200";};led {compatible = "jz2440_led";reg = <S3C2410_GPF(5) 1>;};i2c {compatile = "samsung,i2c";at24c02 {compatile = "at24c02"; };};mytest {compatile = "mytest", "simple-bus";mytest@0 {compatile = "mytest_0";};};
};(1)led 结点可以转换为 platform_device,因为其是根节点下的子节点,且含有compatile属性
(2)i2c 结点可以转换为 platform_device,理由同 led 结点。但是 i2c 的子节点 at24c02 不可以转换为 platform_device, 理由其不是根节点下的子节点。另外,像 i2c 下的子节点 at24c02 一般交给驱动程序的中的probe函数来处理,对于i2c驱动,会将其转换I2C_Client结构体。
(3)mytest 结点可以转换为 platform_device,理由同 led 结点。注意,其子节点 mytest@0 也可以转换为 platform_device,理由是 mytest 结点的 compatile 属性为: "simple-bus",且子节点 mytest@0 中也包含 compatile 属性。
[补充]: simple-bus 表示一点简单的内存映射的总线,既然CPU可以访问到这段内存,那么该子节点也会转换为 platform_device。
5.2 device_node 如何转换为 platform_device 的
5.2.1 概述
platform_device中含有resource数组, 它来自device_node的reg, interrupts属性;
platform_device.dev.of_node指向device_node, 可以通过它获得其他属性
5.2.2 函数调用过程
(1)of_platform_default_populate_init (drivers/of/platform.c) 被调用到过程:
start_kernel // init/main.crest_init();pid = kernel_thread(kernel_init, NULL, CLONE_FS);kernel_initkernel_init_freeable();do_basic_setup();do_initcalls();for (level = 0; level < ARRAY_SIZE(initcall_levels) - 1; level++)do_initcall_level(level); // 比如 do_initcall_level(3)for (fn = initcall_levels[3]; fn < initcall_levels[3+1]; fn++)do_one_initcall(initcall_from_entry(fn)); // 就是调用"arch_initcall_sync(fn)"中定义的fn函数[补充]: of_platform_default_populate_init()函数的段属性被标记为".initcall3s.init",内核启动时会自动从该段属性中取出对应的函数指针去执行。
(2)of_platform_default_populate_init (drivers/of/platform.c) 生成platform_device的过程:
of_platform_default_populate_initof_platform_default_populate(NULL, NULL, NULL);of_platform_populate(NULL, of_default_bus_match_table, NULL, NULL)for_each_child_of_node(root, child) {rc = of_platform_bus_create(child, matches, lookup, parent, true); // 调用过程看下面dev = of_device_alloc(np, bus_id, parent); // 根据device_node节点的属性设置platform_device的resourceif (rc) {of_node_put(child);break;}}[补充]: 对于根节点下的每一个一级子节点,都会当做总线结点来处理。会为其创建platform_device,并构造资源变量,并将of_node指针指向对应的设备树的device_node。另外,如果总线结点的子节点中compatile 属性包含"simple-bus","simple-mfd","isa","arm,amba-bus"等特殊属性,也会将其作为总线结点去处理。
(3)of_platform_bus_create(bus, matches, ...)的调用过程(处理bus节点生成platform_devie, 并决定是否处理它的子节点):
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent); // 生成bus节点的platform_device结构体if (!dev || !of_match_node(matches, bus)) // 如果bus节点的compatile属性不吻合matches成表, 就不处理它的子节点return 0;for_each_child_of_node(bus, child) { // 取出每一个子节点pr_debug(" create child: %pOF\n", child);rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict); // 处理它的子节点, of_platform_bus_create是一个递归调用if (rc) {of_node_put(child);break;}}(4)I2C总线节点的处理过程:
/i2c节点一般表示i2c控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;platform_driver的probe函数中会调用i2c_add_numbered_adapter:i2c_add_numbered_adapter // drivers/i2c/i2c-core-base.c__i2c_add_numbered_adapteri2c_register_adapterof_i2c_register_devices(adap); // drivers/i2c/i2c-core-of.cfor_each_available_child_of_node(bus, node) {client = of_i2c_register_device(adap, node);client = i2c_new_device(adap, &info); // 设备树中的i2c子节点被转换为i2c_client}(5)SPI总线节点的处理过程:
/spi节点一般表示spi控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;platform_driver的probe函数中会调用spi_register_master, 即spi_register_controller:spi_register_controller // drivers/spi/spi.cof_register_spi_devices // drivers/spi/spi.cfor_each_available_child_of_node(ctlr->dev.of_node, nc) {spi = of_register_spi_device(ctlr, nc); // 设备树中的spi子节点被转换为spi_devicespi = spi_alloc_device(ctlr);rc = of_spi_parse_dt(ctlr, spi, nc);rc = spi_add_device(spi);}[补充]: 资源包括 ① IO资源 ② 内存资源 ③ 中断资源
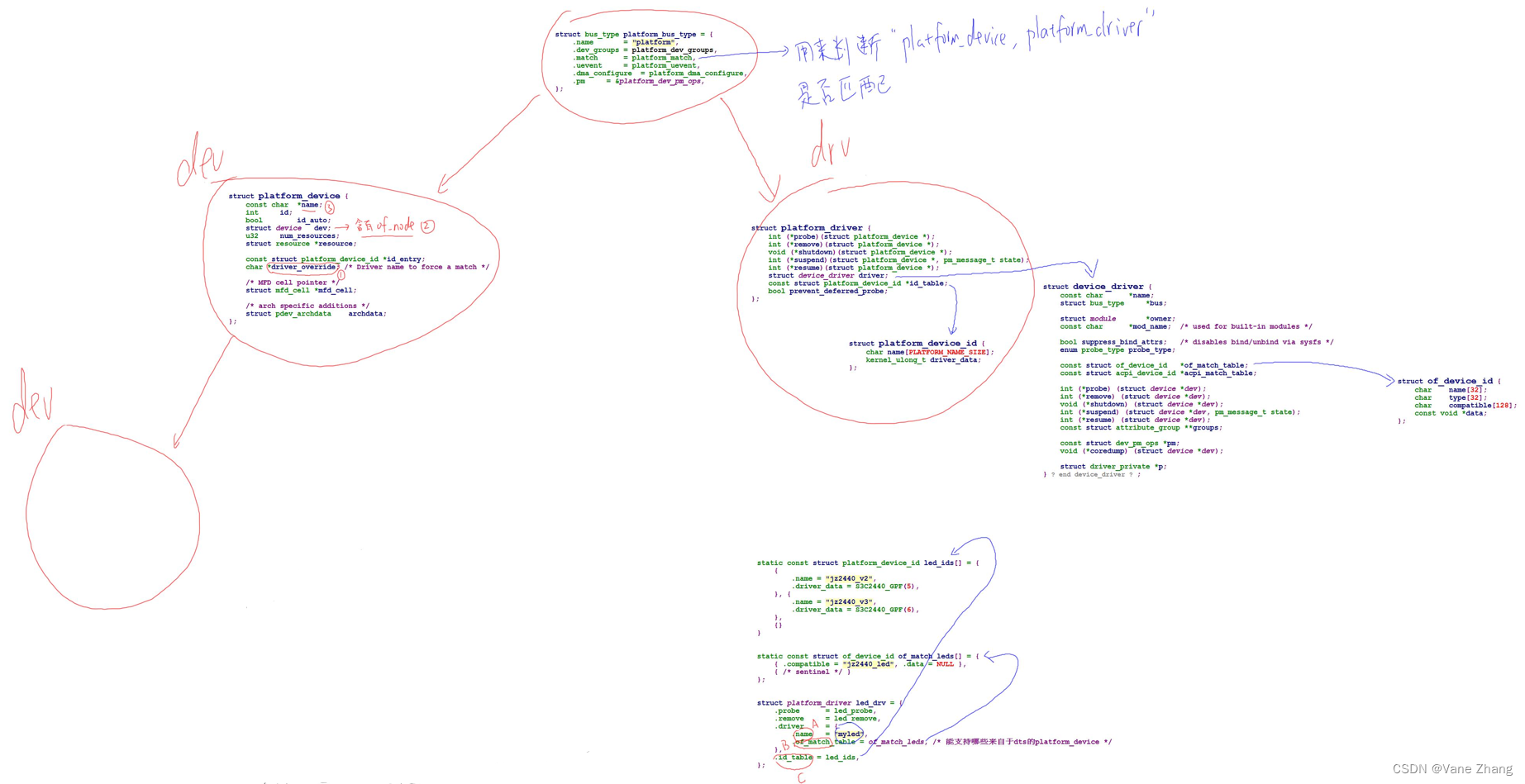
6 platform_device跟platform_driver的匹配
涉及到的源码文件:drivers/base/platform.c
6.1 注册 platform_driver 的过程:
platform_driver_register__platform_driver_registerdrv->driver.probe = platform_drv_probe;driver_registerbus_add_driverklist_add_tail(&priv->knode_bus, &bus->p->klist_drivers); // 把 platform_driver 放入 platform_bus_type 的driver链表中driver_attachbus_for_each_dev(drv->bus, NULL, drv, __driver_attach); // 对于plarform_bus_type下的每一个设备, 调用__driver_attach__driver_attachret = driver_match_device(drv, dev); // 判断dev和drv是否匹配成功return drv->bus->match ? drv->bus->match(dev, drv) : 1; // 调用 platform_bus_type.matchdriver_probe_device(drv, dev);really_probedrv->probe // platform_drv_probeplatform_drv_probestruct platform_driver *drv = to_platform_driver(_dev->driver);drv->probe6.2 注册 platform_device 的过程:
platform_device_registerplatform_device_adddevice_addbus_add_deviceklist_add_tail(&dev->p->knode_bus, &bus->p->klist_devices); // 把 platform_device 放入 platform_bus_type的device链表中bus_probe_device(dev);device_initial_probe__device_attachret = bus_for_each_drv(dev->bus, NULL, &data, __device_attach_driver); // // 对于plarform_bus_type下的每一个driver, 调用 __device_attach_driver__device_attach_driverret = driver_match_device(drv, dev);return drv->bus->match ? drv->bus->match(dev, drv) : 1; // 调用platform_bus_type.matchdriver_probe_device6.3 匹配过程按优先顺序罗列如下:
(1)比较 platform_dev.driver_override 和 platform_driver.drv->name
(2)比较 platform_dev.dev.of_node的compatible属性 和 platform_driver.drv->of_match_table
(3)比较 platform_dev.name 和 platform_driver.id_table
(4)比较 platform_dev.name 和 platform_driver.drv->name
[补充]: 匹配函数是platform_bus_type.match, 即platform_match。有一个成功, 即匹配成功。
6.4 补充:图解笔记
7 内核中设备树的操作函数
include/linux/目录下有很多of开头的头文件:
7.1 处理dtb相关的函数
of_fdt.h // dtb文件的相关操作函数, 我们一般用不到,// 因为dtb文件在内核中已经被转换为device_node树(它更易于使用)7.2 处理device_node相关的函数
of.h // 提供设备树的一般处理函数, 比如 of_property_read_u32// (读取某个属性的u32值), of_get_child_count(获取某个device_node的子节点数)
of_address.h // 地址相关的函数, 比如 of_get_address(获得reg属性中的addr, size值)
of_dma.h // 设备树中DMA相关属性的函数
of_gpio.h // GPIO相关的函数
of_graph.h // GPU相关驱动中用到的函数, 从设备树中获得GPU信息
of_iommu.h // 很少用到
of_irq.h // 中断相关的函数
of_mdio.h // MDIO (Ethernet PHY) API
of_net.h // OF helpers for network devices.
of_pci.h // PCI相关函数
of_pdt.h // 很少用到
of_reserved_mem.h // reserved_mem的相关函数7.3 处理platform_device相关的函数
of_platform.h // 把device_node转换为platform_device时用到的函数, // 比如of_device_alloc(根据device_node分配设置platform_device), // of_find_device_by_node (根据device_node查找到platform_device),// of_platform_bus_probe (处理device_node及它的子节点)
of_device.h // 设备相关的函数, 比如 of_match_device(从matches数组中取出与当前设备最匹配的一项)8 在根文件系统中查看设备树(有助于调试)
8.1 该文件系统中查看dtb文件
我们知道uboot会把dtb文件传递给内核,并且dtb所占据的那块内存会被保留下来,我们可以在该文件系统中去查看dtb文件,具体查看方法如下:
(1)查看目录:/sys/firmware/fdt // 原始dtb文件
(2)查看方法:hexdump -C /sys/firmware/fdt8.2 以目录的形式查看设备树文件
/sys/firmware/devicetree // 以目录结构程现的dtb文件, 根节点对应base目录, 每一个节点对应一个目录, 每一个属性对应一个文件。
8.3 在根文件系统中查看platform_device
/sys/devices/platform // 系统中所有的platform_device, 有来自设备树的, 也有来有.c文件中注册的。对于来自设备树的platform_device,可以进入 /sys/devices/platform/<设备名>/of_node 查看它的设备树属性。(如果有of_node属性,说明该平台设备来自于设备树)
8.4 在/proc目录下查看设备树文件
/proc/device-tree 是链接文件, 指向 /sys/firmware/devicetree/base
相关文章:
【设备树笔记整理4】内核对设备树的处理
1 从源头分析_内核head.S对dtb的简单处理 1.1 bootloader向内核传递的参数 (1)bootloader启动内核时,会设置r0,r1,r2三个寄存器: r0一般设置为0;r1一般设置为machine_id (在使用设备树时该参数没有被使用…...

算法通关村第七关——递归和迭代实现二叉树前中后序遍历
1.递归 1.1 熟悉递归 所有的递归有两个基本特征: 执行时范围不断缩小,这样才能触底反弹。终止判断在调用递归的前面。 写递归的步骤: 从小到大递推。分情况讨论,明确结束条件。组合出完整方法。想验证就从大到小画图推演。 …...
Datawhale Django后端开发入门Task01 Vscode配置环境
首先呢放一张运行成功的截图纪念一下,感谢众多小伙伴的帮助呀,之前没有配置这方面的经验 ,但还是一步一步配置成功了,所以在此以一个纯小白的经验分享如何配置成功。 1.选择要建立项目的文件夹,打开文件找到目标文件夹…...

django部署到centos服务器上
具体的操作步骤 步骤一 更新系统和安装依赖, sudo yum update sudo yum install python3 python3-pip python3-devel git步骤二:创建并激活虚拟环境 在终端中执行以下命令: python3 -m venv myenv source myenv/bin/activate可以不创建虚拟…...
IOS开发-XCode14介绍与入门
IOS开发-XCode14介绍与入门 1. XCODE14的小吐槽2. XCODE的功能bar一览3. XCODE项目配置一览4. XCODE更改DEBUG/RELEASE模式5. XCODE单元测试 1. XCODE14的小吐槽 iOS开发工具一直有个毛病,就是新版本的开发工具的总会有一些奇奇怪怪的bug。比如在我的Mac-Pro&#…...
)
Interactive Marker Publish Pose All the Time (Interactive Marker通过topic一直发送其状态)
以下代码实现了:Interactive Marker通过topic一直发送其状态,而不只是交互时才发送。 几个要点: 通过定时器rospy.Timer实现PublishInteractiveMarkerServer feedback.pose的类型是geometry_msgs/Pose,而不是geometry_msgs/PoseS…...
前后端分离------后端创建笔记(04)前后端对接
本文章转载于【SpringBootVue】全网最简单但实用的前后端分离项目实战笔记 - 前端_大菜007的博客-CSDN博客 仅用于学习和讨论,如有侵权请联系 源码:https://gitee.com/green_vegetables/x-admin-project.git 素材:https://pan.baidu.com/s/…...
一站式自动化测试平台-Autotestplat
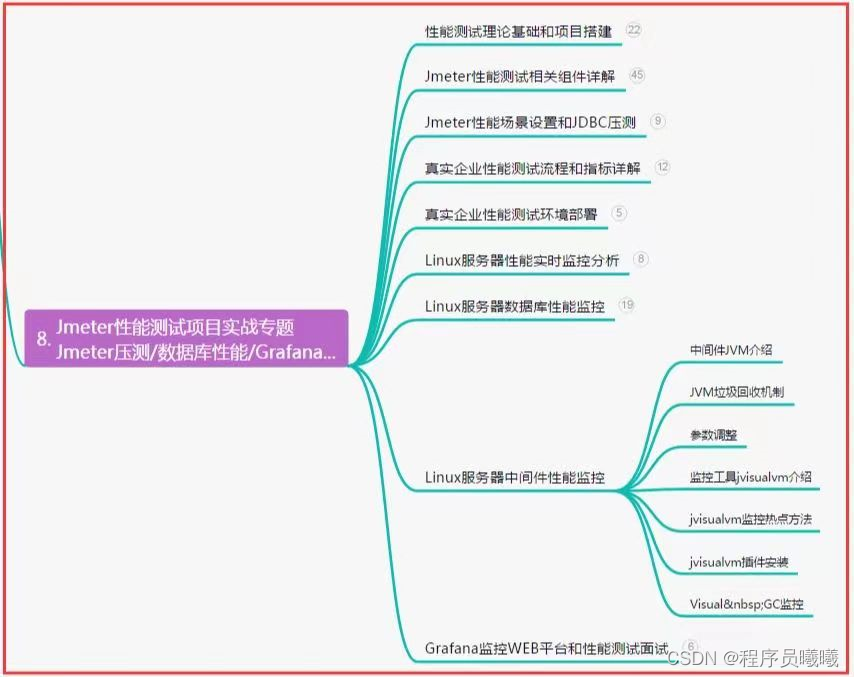
3.1 自动化平台开发方案 3.1.1 功能需求 3.1.3 开发时间计划 如果是刚入门、但有一点代码基础的测试人员,大概 3 个月能做出演示版(Demo)进行自动化测试,6 个月内胜任开展工作中项目的自动化测试。 如果是有自动化测试基础的测试人员,大概 …...

Ansible Service模块,使用 Ansible Service模块进行服务管理
Ansible 是一种自动化工具,它可以简化配置管理、应用程序部署和任务自动化等操作。Ansible 的 Service 模块是其中一个重要的模块,它提供了管理服务的功能,使得在远程主机上启动、停止、重启和重新加载服务变得简单和可靠。本文将介绍 Ansibl…...

共识算法初探
共识机制的背景 加密货币都是去中心化的,去中心化的基础就是P2P节点众多,那么如何吸引用户加入网络成为节点,有那些激励机制?同时,开发的重点是让多个节点维护一个数据库,那么如何决定哪个节点写入&#x…...

Oracle查询表字段名并拼接
在数据库使用中,我们常常需要,获取一张表的全部字段,那该如何查询呢? 查询表字段名 SELECT column_name FROM all_tab_columns WHERE table_name table_name; 只需将引号中的table_name,替换为自己的表名࿰…...
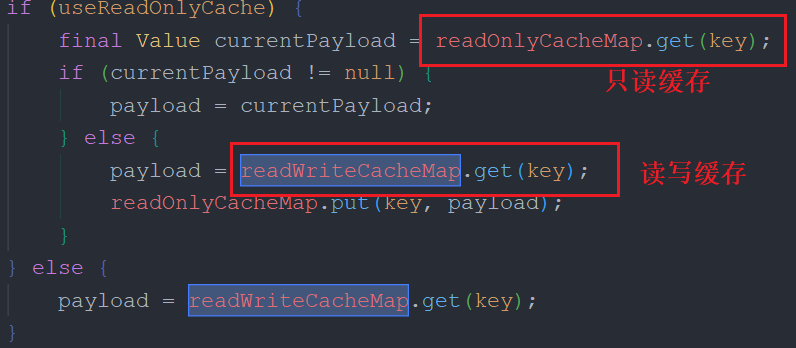
8 张图 | 剖析 Eureka 的首次同步注册表
注册表对于注册中心尤为重要,所有的功能都是围绕这个注册表展开。比如服务 A 要想访问服务 B,就得知道服务 B 的 IP 地址和端口号吧。如下图所示,传统的方式就是服务 A 知道了服务 B 的地址后,发送 HTTP 请求到对应的 API 地址上。…...

github ssh配置
1、生成公钥 用下面的命令生成公钥 ssh-keygen -t rsa -b 4096 -C 邮箱 生成的公钥默认在文件夹 ~/.ssh/ 下的 id_rsa.pub 2、在github配置本地的公钥 先复制本地公钥文件中的内容 cat ~/.ssh/id_rsa.pub 打开github的settings > SSH and GPG keys > new SSH key …...
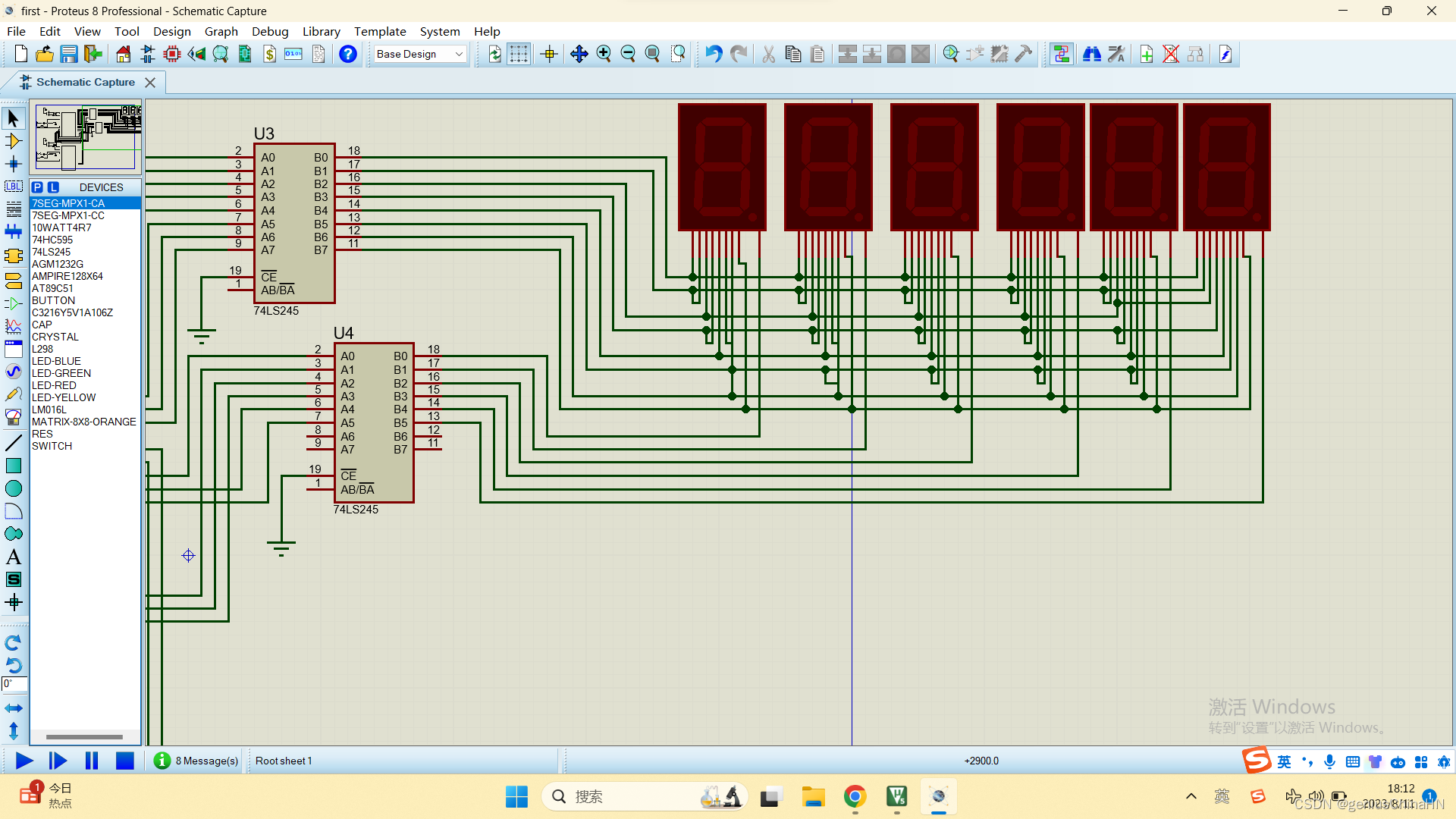
c51单片机串口通信(中断方式接收数据)(单片机--单片机通信)示例代码 附proteus图
单片机一般采用中断方式接受数据,这样便于及时处理 #include "reg51.h" #include "myheader.h" #define uchar unsigned char int szc[10]{0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; int bufferc[6]{0}; int sza[6]{0x01,0x02,0x0…...

腾讯面试题算法还原【游戏安全】
本题的参考链接:https://share.weiyun.com/5Xg2b7v 其实拿到这个题我就感觉在哪里看过,后来想想是在旺仔那里看到的,以下是旺仔写的分析过程可以参考一下https://bbs.kanxue.com/thread-276536.htm 但是这个题要比旺仔拿到的那个要增加些许…...
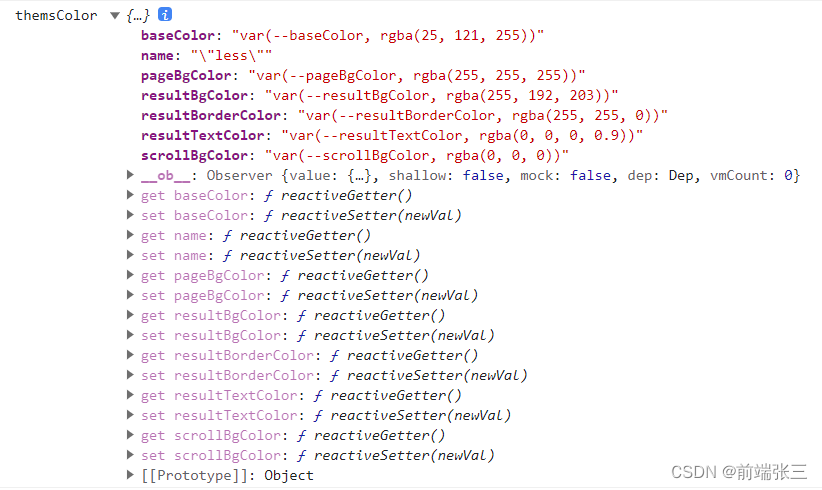
vue + less 实现动态主题换肤功能
文章目录 前言一、前提条件1. 初始化vue项目2. 安装插件 二、新建文件夹主题theme1.style.less文件2.model.js文件3.theme.js文件theme文件夹最终效果 三、修改vue.config.js文件四、页面上的具体使用1. index.vue 页面2. index.vue 页面注意点说明3. index.vue 效果 五、在js中…...

matlab使用教程(15)—图论基础
1.有向图和无向图 1.1什么是图? 图是表示各种关系的节点和边的集合: • 节点 是与对象对应的顶点。 • 边 是对象之间的连接。 • 图的边有时会有权重 ,表示节点之间的每个连接的强度(或一些其他属性)。 这些定…...
【量化课程】02_4.数理统计的基本概念
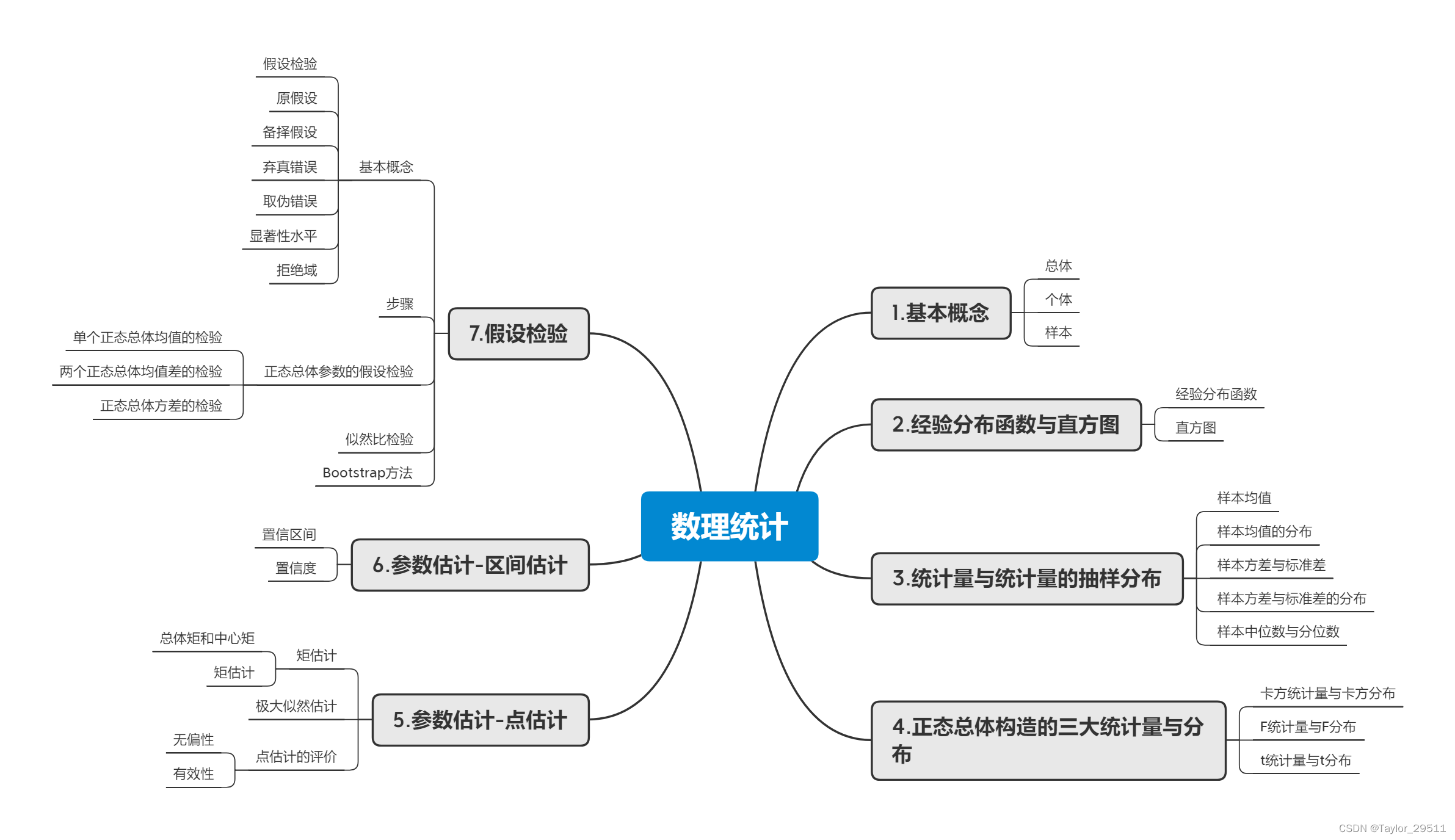
2.4_数理统计的基本概念 数理统计思维导图 更多详细内容见notebook 1.基本概念 总体:研究对象的全体,它是一个随机变量,用 X X X表示。 个体:组成总体的每个基本元素。 简单随机样本:来自总体 X X X的 n n n个相互…...

【计算机视觉|生成对抗】改进的生成对抗网络(GANs)训练技术
本系列博文为深度学习/计算机视觉论文笔记,转载请注明出处 标题:Improved Techniques for Training GANs 链接:[1606.03498v1] Improved Techniques for Training GANs (arxiv.org) 摘要 本文介绍了一系列应用于生成对抗网络(G…...
SQLyog中导入CSV文件入库到MySQL中
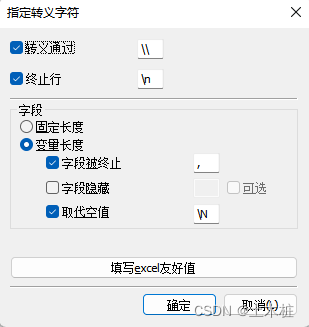
1.在数据库中新建一个表,设置列名(与待导入文件一致),字段可以多出几个都可以 2.右键表名,导入- - >导入使用本地加载的CSV数据 选择使用加载本地CVS数据 3.指定好转义字符,将终止设置为,号(英文状态下…...
)
别再纠结了!给激光焊接新手讲透单模和多模激光到底怎么选(附M²因子解读)
激光焊接设备选型指南:单模与多模激光的实战抉择 当你第一次站在激光焊接设备采购的十字路口,面对"单模"和"多模"这两个专业术语时,那种迷茫感我深有体会。五年前,我作为产线技术负责人,需要为汽车…...

为什么你的霓虹总像“塑料灯带”?Midjourney光子散射模拟缺陷曝光:3个被官方隐瞒的--sref调参禁区
更多请点击: https://kaifayun.com 第一章:为什么你的霓虹总像“塑料灯带”? 霓虹效果在现代 UI 设计中无处不在——按钮悬停、加载指示器、焦点高亮……但多数实现却流于表面:生硬的 box-shadow、固定色值的渐变边框、缺乏物理感…...

实战教程:5步构建基于YOLOv5的FPS游戏智能瞄准系统
实战教程:5步构建基于YOLOv5的FPS游戏智能瞄准系统 【免费下载链接】FPSAutomaticAiming 基于yolov5的FPS游戏AI。 项目地址: https://gitcode.com/gh_mirrors/fp/FPSAutomaticAiming FPSAutomaticAiming是一个基于YOLOv5深度学习算法的FPS游戏自动瞄准系统&…...

如何用Nucleus Co-Op让单机游戏变身本地多人分屏神器
如何用Nucleus Co-Op让单机游戏变身本地多人分屏神器 【免费下载链接】nucleuscoop Starts multiple instances of a game for split-screen multiplayer gaming! 项目地址: https://gitcode.com/gh_mirrors/nu/nucleuscoop 还在为想和朋友一起玩游戏却只有一台电脑而烦…...
)
Lindy多步骤任务自动化落地全图谱(企业级架构师压箱底实践)
更多请点击: https://codechina.net 第一章:Lindy多步骤任务自动化落地全图谱(企业级架构师压箱底实践) Lindy效应在自动化系统设计中揭示了一个关键洞察:越久经考验的实践,其未来预期寿命越长。Lindy多步…...
——仅限首批500名开发者开放》)
企业级Veo 2提示词治理框架(含合规校验/版本回溯/效果归因三模块)——仅限首批500名开发者开放》
更多请点击: https://intelliparadigm.com 第一章:Veo 2提示词治理框架的核心定位与演进逻辑 Veo 2提示词治理框架并非单纯的技术工具升级,而是面向AIGC生产环境规模化、合规化与可审计化需求的战略性基础设施重构。其核心定位在于将离散、经…...

AI-eSIM 开启智联新入口,量讯物联助力企业把握万物智联新机遇
近期,在 2026 移动云大会 AI-eSIM 分论坛上,中国移动发布 AI-eSIM“139”多生态智能服务体系,引发物联网、智能终端与 AIoT 产业广泛关注。该体系以 1 个 AI-eSIM 芯片入口、3 大核心引擎、赋能 9 类重点场景,构建以 Token 为中心…...

如何高效实现前端文件下载:FileSaver.js完整实用指南
如何高效实现前端文件下载:FileSaver.js完整实用指南 【免费下载链接】FileSaver.js An HTML5 saveAs() FileSaver implementation 项目地址: https://gitcode.com/gh_mirrors/fi/FileSaver.js FileSaver.js是一款轻量级的HTML5文件保存解决方案,…...

C语言--day19
第十章 内存管理当./a.out 运行起来后,系统会给a.out分配一段内存区域1、code ,存放编写好的c语言代码。 只读特性,在运行期间不能修改2、data 数据段。 存储全局变量,和被static 修改的变量细分:data 数据段ÿ…...

如何通过Marlin固件配置解决3D打印常见问题:终极完整指南
如何通过Marlin固件配置解决3D打印常见问题:终极完整指南 【免费下载链接】Marlin Marlin is a firmware for RepRap 3D printers optimized for both 8 and 32 bit microcontrollers. Marlin supports all common platforms. Many commercial 3D printers come wit…...