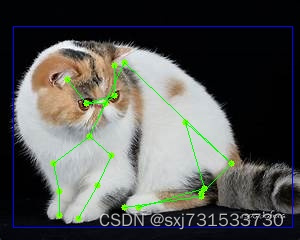
62、华为昇腾开发板Atlas 200I DK A2配置mmpose的hrnet模型推理python/c++
基本思想:适配mmpose模型,记录一下流水帐,环境配置和模型来自,请查看参考链接。

链接: https://pan.baidu.com/s/1IkiwuZf1anyKX1sZkYmD1g?pwd=i51s 提取码: i51s
一、转模型
(base) root@davinci-mini:~/sxj731533730# atc --model=end2end.onnx --framework=5 --output=end2end --input_format=NCHW --input_shape="input:1,3,256,256" --log=error --soc_version=Ascend310B1
ATC start working now, please wait for a moment.
...
ATC run success, welcome to the next use.python代码
import time
import cv2
import numpy as np
from ais_bench.infer.interface import InferSessionmodel_path = "end2end.om"
IMG_PATH = "ca110.jpeg"def bbox_xywh2cs(bbox, aspect_ratio, padding=1., pixel_std=200.):"""Transform the bbox format from (x,y,w,h) into (center, scale)Args:bbox (ndarray): Single bbox in (x, y, w, h)aspect_ratio (float): The expected bbox aspect ratio (w over h)padding (float): Bbox padding factor that will be multilied to scale.Default: 1.0pixel_std (float): The scale normalization factor. Default: 200.0Returns:tuple: A tuple containing center and scale.- np.ndarray[float32](2,): Center of the bbox (x, y).- np.ndarray[float32](2,): Scale of the bbox w & h."""x, y, w, h = bbox[:4]center = np.array([x + w * 0.5, y + h * 0.5], dtype=np.float32)if w > aspect_ratio * h:h = w * 1.0 / aspect_ratioelif w < aspect_ratio * h:w = h * aspect_ratioscale = np.array([w, h], dtype=np.float32) / pixel_stdscale = scale * paddingreturn center, scaledef rotate_point(pt, angle_rad):"""Rotate a point by an angle.Args:pt (list[float]): 2 dimensional point to be rotatedangle_rad (float): rotation angle by radianReturns:list[float]: Rotated point."""assert len(pt) == 2sn, cs = np.sin(angle_rad), np.cos(angle_rad)new_x = pt[0] * cs - pt[1] * snnew_y = pt[0] * sn + pt[1] * csrotated_pt = [new_x, new_y]return rotated_ptdef _get_3rd_point(a, b):"""To calculate the affine matrix, three pairs of points are required. Thisfunction is used to get the 3rd point, given 2D points a & b.The 3rd point is defined by rotating vector `a - b` by 90 degreesanticlockwise, using b as the rotation center.Args:a (np.ndarray): point(x,y)b (np.ndarray): point(x,y)Returns:np.ndarray: The 3rd point."""assert len(a) == 2assert len(b) == 2direction = a - bthird_pt = b + np.array([-direction[1], direction[0]], dtype=np.float32)return third_ptdef get_affine_transform(center,scale,rot,output_size,shift=(0., 0.),inv=False):"""Get the affine transform matrix, given the center/scale/rot/output_size.Args:center (np.ndarray[2, ]): Center of the bounding box (x, y).scale (np.ndarray[2, ]): Scale of the bounding boxwrt [width, height].rot (float): Rotation angle (degree).output_size (np.ndarray[2, ] | list(2,)): Size of thedestination heatmaps.shift (0-100%): Shift translation ratio wrt the width/height.Default (0., 0.).inv (bool): Option to inverse the affine transform direction.(inv=False: src->dst or inv=True: dst->src)Returns:np.ndarray: The transform matrix."""assert len(center) == 2assert len(scale) == 2assert len(output_size) == 2assert len(shift) == 2# pixel_std is 200.scale_tmp = scale * 200.0shift = np.array(shift)src_w = scale_tmp[0]dst_w = output_size[0]dst_h = output_size[1]rot_rad = np.pi * rot / 180src_dir = rotate_point([0., src_w * -0.5], rot_rad)dst_dir = np.array([0., dst_w * -0.5])src = np.zeros((3, 2), dtype=np.float32)src[0, :] = center + scale_tmp * shiftsrc[1, :] = center + src_dir + scale_tmp * shiftsrc[2, :] = _get_3rd_point(src[0, :], src[1, :])dst = np.zeros((3, 2), dtype=np.float32)dst[0, :] = [dst_w * 0.5, dst_h * 0.5]dst[1, :] = np.array([dst_w * 0.5, dst_h * 0.5]) + dst_dirdst[2, :] = _get_3rd_point(dst[0, :], dst[1, :])if inv:trans = cv2.getAffineTransform(np.float32(dst), np.float32(src))else:trans = cv2.getAffineTransform(np.float32(src), np.float32(dst))return transdef bbox_xyxy2xywh(bbox_xyxy):"""Transform the bbox format from x1y1x2y2 to xywh.Args:bbox_xyxy (np.ndarray): Bounding boxes (with scores), shaped (n, 4) or(n, 5). (left, top, right, bottom, [score])Returns:np.ndarray: Bounding boxes (with scores),shaped (n, 4) or (n, 5). (left, top, width, height, [score])"""bbox_xywh = bbox_xyxy.copy()bbox_xywh[:, 2] = bbox_xywh[:, 2] - bbox_xywh[:, 0]bbox_xywh[:, 3] = bbox_xywh[:, 3] - bbox_xywh[:, 1]return bbox_xywhdef _get_max_preds(heatmaps):"""Get keypoint predictions from score maps.Note:batch_size: Nnum_keypoints: Kheatmap height: Hheatmap width: WArgs:heatmaps (np.ndarray[N, K, H, W]): model predicted heatmaps.Returns:tuple: A tuple containing aggregated results.- preds (np.ndarray[N, K, 2]): Predicted keypoint location.- maxvals (np.ndarray[N, K, 1]): Scores (confidence) of the keypoints."""assert isinstance(heatmaps,np.ndarray), ('heatmaps should be numpy.ndarray')assert heatmaps.ndim == 4, 'batch_images should be 4-ndim'N, K, _, W = heatmaps.shapeheatmaps_reshaped = heatmaps.reshape((N, K, -1))idx = np.argmax(heatmaps_reshaped, 2).reshape((N, K, 1))maxvals = np.amax(heatmaps_reshaped, 2).reshape((N, K, 1))preds = np.tile(idx, (1, 1, 2)).astype(np.float32)preds[:, :, 0] = preds[:, :, 0] % Wpreds[:, :, 1] = preds[:, :, 1] // Wpreds = np.where(np.tile(maxvals, (1, 1, 2)) > 0.0, preds, -1)return preds, maxvalsdef transform_preds(coords, center, scale, output_size, use_udp=False):"""Get final keypoint predictions from heatmaps and apply scaling andtranslation to map them back to the image.Note:num_keypoints: KArgs:coords (np.ndarray[K, ndims]):* If ndims=2, corrds are predicted keypoint location.* If ndims=4, corrds are composed of (x, y, scores, tags)* If ndims=5, corrds are composed of (x, y, scores, tags,flipped_tags)center (np.ndarray[2, ]): Center of the bounding box (x, y).scale (np.ndarray[2, ]): Scale of the bounding boxwrt [width, height].output_size (np.ndarray[2, ] | list(2,)): Size of thedestination heatmaps.use_udp (bool): Use unbiased data processingReturns:np.ndarray: Predicted coordinates in the images."""assert coords.shape[1] in (2, 4, 5)assert len(center) == 2assert len(scale) == 2assert len(output_size) == 2# Recover the scale which is normalized by a factor of 200.scale = scale * 200.0if use_udp:scale_x = scale[0] / (output_size[0] - 1.0)scale_y = scale[1] / (output_size[1] - 1.0)else:scale_x = scale[0] / output_size[0]scale_y = scale[1] / output_size[1]target_coords = np.ones_like(coords)target_coords[:, 0] = coords[:, 0] * scale_x + center[0] - scale[0] * 0.5target_coords[:, 1] = coords[:, 1] * scale_y + center[1] - scale[1] * 0.5return target_coordsdef keypoints_from_heatmaps(heatmaps,center,scale,unbiased=False,post_process='default',kernel=11,valid_radius_factor=0.0546875,use_udp=False,target_type='GaussianHeatmap'):# Avoid being affectedheatmaps = heatmaps.copy()N, K, H, W = heatmaps.shapepreds, maxvals = _get_max_preds(heatmaps)# add +/-0.25 shift to the predicted locations for higher acc.for n in range(N):for k in range(K):heatmap = heatmaps[n][k]px = int(preds[n][k][0])py = int(preds[n][k][1])if 1 < px < W - 1 and 1 < py < H - 1:diff = np.array([heatmap[py][px + 1] - heatmap[py][px - 1],heatmap[py + 1][px] - heatmap[py - 1][px]])preds[n][k] += np.sign(diff) * .25if post_process == 'megvii':preds[n][k] += 0.5# Transform back to the imagefor i in range(N):preds[i] = transform_preds(preds[i], center[i], scale[i], [W, H], use_udp=use_udp)if post_process == 'megvii':maxvals = maxvals / 255.0 + 0.5return preds, maxvalsdef decode(output, center, scale, score_, batch_size=1):c = np.zeros((batch_size, 2), dtype=np.float32)s = np.zeros((batch_size, 2), dtype=np.float32)score = np.ones(batch_size)for i in range(batch_size):c[i, :] = centers[i, :] = scalescore[i] = np.array(score_).reshape(-1)preds, maxvals = keypoints_from_heatmaps(output,c,s,False,'default',11,0.0546875,False,'GaussianHeatmap')all_preds = np.zeros((batch_size, preds.shape[1], 3), dtype=np.float32)all_boxes = np.zeros((batch_size, 6), dtype=np.float32)all_preds[:, :, 0:2] = preds[:, :, 0:2]all_preds[:, :, 2:3] = maxvalsall_boxes[:, 0:2] = c[:, 0:2]all_boxes[:, 2:4] = s[:, 0:2]all_boxes[:, 4] = np.prod(s * 200.0, axis=1)all_boxes[:, 5] = scoreresult = {}result['preds'] = all_predsresult['boxes'] = all_boxesprint(result)return resultdef draw(bgr, predict_dict, skeleton,box):cv2.rectangle(bgr, (int(box[0]), int(box[1])), (int(box[0]) + int(box[2]), int(box[1]) + int(box[3])),(255, 0, 0))all_preds = predict_dict["preds"]for all_pred in all_preds:for x, y, s in all_pred:cv2.circle(bgr, (int(x), int(y)), 3, (0, 255, 120), -1)for sk in skeleton:x0 = int(all_pred[sk[0]][0])y0 = int(all_pred[sk[0]][1])x1 = int(all_pred[sk[1]][0])y1 = int(all_pred[sk[1]][1])cv2.line(bgr, (x0, y0), (x1, y1), (0, 255, 0), 1)cv2.imwrite("sxj731533730_sxj.jpg", bgr)if __name__ == "__main__":# Create RKNN objectmodel = InferSession(0, model_path)print("done")bbox = [13.711652 , 26.188112, 293.61298-13.711652 , 227.78246-26.188112, 9.995332e-01]image_size = [256, 256]src_img = cv2.imread(IMG_PATH)img = cv2.cvtColor(src_img, cv2.COLOR_BGR2RGB) # hwc rgbaspect_ratio = image_size[0] / image_size[1]img_height = img.shape[0]img_width = img.shape[1]padding = 1.25pixel_std = 200center, scale = bbox_xywh2cs(bbox,aspect_ratio,padding,pixel_std)trans = get_affine_transform(center, scale, 0, image_size)img = cv2.warpAffine(img,trans, (int(image_size[0]), int(image_size[1])),flags=cv2.INTER_LINEAR)print(trans)img = img / 255.0 # 归一化到0~1img = img.transpose(2, 0, 1)img = np.ascontiguousarray(img, dtype=np.float32)# Inferenceprint("--> Running model")outputs = model.infer([img])[0]print(outputs)predict_dict = decode(outputs, center, scale, bbox[-1])skeleton = [[0, 1],[0, 2],[1, 3],[0, 4],[1, 4],[4, 5],[5, 7],[5,8],[5, 9],[6, 7],[6, 10],[6, 11],[8, 12],[9, 13],[10, 14],[11, 15],[12, 16],[13, 17],[14, 18],[15, 19]]draw(src_img, predict_dict, skeleton,bbox)
cmakelists.txt
cmake_minimum_required(VERSION 3.16)
project(untitled10)
set(CMAKE_CXX_FLAGS "-std=c++11")
set(CMAKE_CXX_STANDARD 11)
add_definitions(-DENABLE_DVPP_INTERFACE)include_directories(/usr/local/samples/cplusplus/common/acllite/include)
include_directories(/usr/local/Ascend/ascend-toolkit/latest/aarch64-linux/include)
find_package(OpenCV REQUIRED)
#message(STATUS ${OpenCV_INCLUDE_DIRS})
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
#链接Opencv库
add_library(libascendcl SHARED IMPORTED)
set_target_properties(libascendcl PROPERTIES IMPORTED_LOCATION /usr/local/Ascend/ascend-toolkit/latest/aarch64-linux/lib64/libascendcl.so)
add_library(libacllite SHARED IMPORTED)
set_target_properties(libacllite PROPERTIES IMPORTED_LOCATION /usr/local/samples/cplusplus/common/acllite/out/aarch64/libacllite.so)add_executable(untitled10 main.cpp)
target_link_libraries(untitled10 ${OpenCV_LIBS} libascendcl libacllite)c++代码
#include <opencv2/opencv.hpp>
#include "AclLiteUtils.h"
#include "AclLiteImageProc.h"
#include "AclLiteResource.h"
#include "AclLiteError.h"
#include "AclLiteModel.h"using namespace std;
using namespace cv;
typedef enum Result {SUCCESS = 0,FAILED = 1
} Result;struct Keypoints {float x;float y;float score;Keypoints() : x(0), y(0), score(0) {}Keypoints(float x, float y, float score) : x(x), y(y), score(score) {}
};struct Box {float center_x;float center_y;float scale_x;float scale_y;float scale_prob;float score;Box() : center_x(0), center_y(0), scale_x(0), scale_y(0), scale_prob(0), score(0) {}Box(float center_x, float center_y, float scale_x, float scale_y, float scale_prob, float score) :center_x(center_x), center_y(center_y), scale_x(scale_x), scale_y(scale_y), scale_prob(scale_prob),score(score) {}
};void bbox_xywh2cs(float bbox[], float aspect_ratio, float padding, float pixel_std, float *center, float *scale) {float x = bbox[0];float y = bbox[1];float w = bbox[2];float h = bbox[3];*center = x + w * 0.5;*(center + 1) = y + h * 0.5;if (w > aspect_ratio * h)h = w * 1.0 / aspect_ratio;else if (w < aspect_ratio * h)w = h * aspect_ratio;*scale = (w / pixel_std) * padding;*(scale + 1) = (h / pixel_std) * padding;
}void rotate_point(float *pt, float angle_rad, float *rotated_pt) {float sn = sin(angle_rad);float cs = cos(angle_rad);float new_x = pt[0] * cs - pt[1] * sn;float new_y = pt[0] * sn + pt[1] * cs;rotated_pt[0] = new_x;rotated_pt[1] = new_y;}void _get_3rd_point(cv::Point2f a, cv::Point2f b, float *direction) {float direction_0 = a.x - b.x;float direction_1 = a.y - b.y;direction[0] = b.x - direction_1;direction[1] = b.y + direction_0;}void get_affine_transform(float *center, float *scale, float rot, float *output_size, float *shift, bool inv,cv::Mat &trans) {float scale_tmp[] = {0, 0};scale_tmp[0] = scale[0] * 200.0;scale_tmp[1] = scale[1] * 200.0;float src_w = scale_tmp[0];float dst_w = output_size[0];float dst_h = output_size[1];float rot_rad = M_PI * rot / 180;float pt[] = {0, 0};pt[0] = 0;pt[1] = src_w * (-0.5);float src_dir[] = {0, 0};rotate_point(pt, rot_rad, src_dir);float dst_dir[] = {0, 0};dst_dir[0] = 0;dst_dir[1] = dst_w * (-0.5);cv::Point2f src[3] = {cv::Point2f(0, 0), cv::Point2f(0, 0), cv::Point2f(0, 0)};src[0] = cv::Point2f(center[0] + scale_tmp[0] * shift[0], center[1] + scale_tmp[1] * shift[1]);src[1] = cv::Point2f(center[0] + src_dir[0] + scale_tmp[0] * shift[0],center[1] + src_dir[1] + scale_tmp[1] * shift[1]);float direction_src[] = {0, 0};_get_3rd_point(src[0], src[1], direction_src);src[2] = cv::Point2f(direction_src[0], direction_src[1]);cv::Point2f dst[3] = {cv::Point2f(0, 0), cv::Point2f(0, 0), cv::Point2f(0, 0)};dst[0] = cv::Point2f(dst_w * 0.5, dst_h * 0.5);dst[1] = cv::Point2f(dst_w * 0.5 + dst_dir[0], dst_h * 0.5 + dst_dir[1]);float direction_dst[] = {0, 0};_get_3rd_point(dst[0], dst[1], direction_dst);dst[2] = cv::Point2f(direction_dst[0], direction_dst[1]);if (inv) {trans = cv::getAffineTransform(dst, src);} else {trans = cv::getAffineTransform(src, dst);}}void
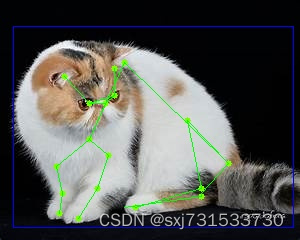
transform_preds(std::vector <cv::Point2f> coords, std::vector <Keypoints> &target_coords, float *center, float *scale,int w, int h, bool use_udp = false) {float scale_x[] = {0, 0};float temp_scale[] = {scale[0] * 200, scale[1] * 200};if (use_udp) {scale_x[0] = temp_scale[0] / (w - 1);scale_x[1] = temp_scale[1] / (h - 1);} else {scale_x[0] = temp_scale[0] / w;scale_x[1] = temp_scale[1] / h;}for (int i = 0; i < coords.size(); i++) {target_coords[i].x = coords[i].x * scale_x[0] + center[0] - temp_scale[0] * 0.5;target_coords[i].y = coords[i].y * scale_x[1] + center[1] - temp_scale[1] * 0.5;}}int main() {const char *modelPath = "../end2end.om";bool flip_test = true;bool heap_map = false;float keypoint_score = 0.3f;cv::Mat bgr = cv::imread("../ca110.jpeg");cv::Mat rgb;cv::cvtColor(bgr, rgb, cv::COLOR_BGR2RGB);float image_target_w = 256;float image_target_h = 256;float padding = 1.25;float pixel_std = 200;float aspect_ratio = image_target_h / image_target_w;float bbox[] = {13.711652, 26.188112, 293.61298, 227.78246, 9.995332e-01};// 需要检测框架 这个矩形框来自检测框架的坐标 x y w h scorebbox[2] = bbox[2] - bbox[0];bbox[3] = bbox[3] - bbox[1];float center[2] = {0, 0};float scale[2] = {0, 0};bbox_xywh2cs(bbox, aspect_ratio, padding, pixel_std, center, scale);float rot = 0;float shift[] = {0, 0};bool inv = false;float output_size[] = {image_target_h, image_target_w};cv::Mat trans;get_affine_transform(center, scale, rot, output_size, shift, inv, trans);std::cout << trans << std::endl;std::cout << center[0] << " " << center[1] << " " << scale[0] << " " << scale[1] << std::endl;cv::Mat detect_image;//= cv::Mat::zeros(image_target_w ,image_target_h, CV_8UC3);cv::warpAffine(rgb, detect_image, trans, cv::Size(image_target_h, image_target_w), cv::INTER_LINEAR);//cv::imwrite("te.jpg",detect_image);std::cout << detect_image.cols << " " << detect_image.rows << std::endl;// inferencebool release = false;//SampleYOLOV7 sampleYOLO(modelPath, target_width, target_height);float *imageBytes;AclLiteResource aclResource_;AclLiteImageProc imageProcess_;AclLiteModel model_;aclrtRunMode runMode_;ImageData resizedImage_;const char *modelPath_;int32_t modelWidth_;int32_t modelHeight_;AclLiteError ret = aclResource_.Init();if (ret == FAILED) {ACLLITE_LOG_ERROR("resource init failed, errorCode is %d", ret);return FAILED;}ret = aclrtGetRunMode(&runMode_);if (ret == FAILED) {ACLLITE_LOG_ERROR("get runMode failed, errorCode is %d", ret);return FAILED;}// init dvpp resourceret = imageProcess_.Init();if (ret == FAILED) {ACLLITE_LOG_ERROR("imageProcess init failed, errorCode is %d", ret);return FAILED;}// load model from fileret = model_.Init(modelPath);if (ret == FAILED) {ACLLITE_LOG_ERROR("model init failed, errorCode is %d", ret);return FAILED;}// data standardizationfloat meanRgb[3] = {0, 0, 0};float stdRgb[3] = {1 / 255.0f, 1 / 255.0f, 1 / 255.0f};// create malloc of image, which is shape with NCHW//const float meanRgb[3] = {0.485f * 255.f, 0.456f * 255.f, 0.406f * 255.f};//const float stdRgb[3] = {(1 / 0.229f / 255.f), (1 / 0.224f / 255.f), (1 / 0.225f / 255.f)};int32_t channel = detect_image.channels();int32_t resizeHeight = detect_image.rows;int32_t resizeWeight = detect_image.cols;imageBytes = (float *) malloc(channel * image_target_w * image_target_h * sizeof(float));memset(imageBytes, 0, channel * image_target_h * image_target_w * sizeof(float));// image to bytes with shape HWC to CHW, and switch channel BGR to RGBfor (int c = 0; c < channel; ++c) {for (int h = 0; h < resizeHeight; ++h) {for (int w = 0; w < resizeWeight; ++w) {int dstIdx = c * resizeHeight * resizeWeight + h * resizeWeight + w;imageBytes[dstIdx] = static_cast<float>((detect_image.at<cv::Vec3b>(h, w)[c] -1.0f * meanRgb[c]) * 1.0f * stdRgb[c] );}}}std::vector <InferenceOutput> inferOutputs;ret = model_.CreateInput(static_cast<void *>(imageBytes),channel * image_target_w * image_target_h * sizeof(float));if (ret == FAILED) {ACLLITE_LOG_ERROR("CreateInput failed, errorCode is %d", ret);return FAILED;}// inferenceret = model_.Execute(inferOutputs);if (ret != ACL_SUCCESS) {ACLLITE_LOG_ERROR("execute model failed, errorCode is %d", ret);return FAILED;}// for()float *data = static_cast<float *>(inferOutputs[0].data.get());//输出维度int shape_d =1;int shape_c = 20;int shape_w = 64;int shape_h = 64;std::vector<float> vec_heap;for (int i = 0; i < shape_c * shape_h * shape_w; i++) {vec_heap.push_back(data[i]);}std::vector <Keypoints> all_preds;std::vector<int> idx;for (int i = 0; i < shape_c; i++) {auto begin = vec_heap.begin() + i * shape_w * shape_h;auto end = vec_heap.begin() + (i + 1) * shape_w * shape_h;float maxValue = *max_element(begin, end);int maxPosition = max_element(begin, end) - begin;all_preds.emplace_back(Keypoints(0, 0, maxValue));idx.emplace_back(maxPosition);}std::vector <cv::Point2f> vec_point;for (int i = 0; i < idx.size(); i++) {int x = idx[i] % shape_w;int y = idx[i] / shape_w;vec_point.emplace_back(cv::Point2f(x, y));}for (int i = 0; i < shape_c; i++) {int px = vec_point[i].x;int py = vec_point[i].y;if (px > 1 && px < shape_w - 1 && py > 1 && py < shape_h - 1) {float diff_0 = vec_heap[py * shape_w + px + 1] - vec_heap[py * shape_w + px - 1];float diff_1 = vec_heap[(py + 1) * shape_w + px] - vec_heap[(py - 1) * shape_w + px];vec_point[i].x += diff_0 == 0 ? 0 : (diff_0 > 0) ? 0.25 : -0.25;vec_point[i].y += diff_1 == 0 ? 0 : (diff_1 > 0) ? 0.25 : -0.25;}}std::vector <Box> all_boxes;if (heap_map) {all_boxes.emplace_back(Box(center[0], center[1], scale[0], scale[1], scale[0] * scale[1] * 400, bbox[4]));}transform_preds(vec_point, all_preds, center, scale, shape_w, shape_h);//0 L_Eye 1 R_Eye 2 L_EarBase 3 R_EarBase 4 Nose 5 Throat 6 TailBase 7 Withers 8 L_F_Elbow 9 R_F_Elbow 10 L_B_Elbow 11 R_B_Elbow// 12 L_F_Knee 13 R_F_Knee 14 L_B_Knee 15 R_B_Knee 16 L_F_Paw 17 R_F_Paw 18 L_B_Paw 19 R_B_Pawint skeleton[][2] = {{0, 1},{0, 2},{1, 3},{0, 4},{1, 4},{4, 5},{5, 7},{5, 8},{5, 9},{6, 7},{6, 10},{6, 11},{8, 12},{9, 13},{10, 14},{11, 15},{12, 16},{13, 17},{14, 18},{15, 19}};cv::rectangle(bgr, cv::Point(bbox[0], bbox[1]), cv::Point(bbox[0] + bbox[2], bbox[1] + bbox[3]),cv::Scalar(255, 0, 0));for (int i = 0; i < all_preds.size(); i++) {if (all_preds[i].score > keypoint_score) {cv::circle(bgr, cv::Point(all_preds[i].x, all_preds[i].y), 3, cv::Scalar(0, 255, 120), -1);//画点,其实就是实心圆}}for (int i = 0; i < sizeof(skeleton) / sizeof(sizeof(skeleton[1])); i++) {int x0 = all_preds[skeleton[i][0]].x;int y0 = all_preds[skeleton[i][0]].y;int x1 = all_preds[skeleton[i][1]].x;int y1 = all_preds[skeleton[i][1]].y;cv::line(bgr, cv::Point(x0, y0), cv::Point(x1, y1),cv::Scalar(0, 255, 0), 1);}cv::imwrite("../image.jpg", bgr);model_.DestroyResource();imageProcess_.DestroyResource();aclResource_.Release();return SUCCESS;
}测试结果
/root/sxj731533730/cmake-build-debug/untitled10
[0.7316863791031282, -0, 15.56737128098375;-4.62405306581973e-17, 0.7316863791031282, 35.08659815701316]
153.662 126.985 1.74938 1.74938
256 256
[INFO] Acl init ok
[INFO] Open device 0 ok
[INFO] Use default context currently
[INFO] dvpp init resource ok
[INFO] Load model ../end2end.om success
[INFO] Create model description success
[INFO] Create model(../end2end.om) output success
[INFO] Init model ../end2end.om success
[INFO] Unload model ../end2end.om success
[INFO] destroy context ok
[INFO] Reset device 0 ok
[INFO] Finalize acl okProcess finished with exit code 0
参考自己的博客
48、mmpose中hrnet关键点识别模型转ncnn和mnn,并进行训练和部署_hrnet ncnn_sxj731533730的博客-CSDN博客
61、华为昇腾开发板Atlas 200I DK A2初步测试,yolov7_batchsize_1&yolov7_batchsize_3的python/c++推理测试_sxj731533730的博客-CSDN博客
相关文章:
62、华为昇腾开发板Atlas 200I DK A2配置mmpose的hrnet模型推理python/c++
基本思想:适配mmpose模型,记录一下流水帐,环境配置和模型来自,请查看参考链接。 链接: https://pan.baidu.com/s/1IkiwuZf1anyKX1sZkYmD1g?pwdi51s 提取码: i51s 一、转模型 (base) rootdavinci-mini:~/sxj731533730# atc --mo…...

【数据结构】双链表
大家好!今天我们来学习数据结构中的双链表。(我们这里讲解的是带头(哨兵位)双向循环链表哦~) 目录 1.双链表的概念 2. 双链表的逻辑结构 3. 双链表的定义 4. 双链表的接口实现 4.1 动态申请一个新结点 4.2 双链表…...
android设置竖屏仍然跟随屏幕旋转怎么办
如题所问,我最近遇到一个bug,就是设置了摇感,然后有用户反馈说设置了手机下拉的系统设置-屏幕旋转-关闭。然后屏幕还是会旋转的问题。 首先,我们先从如何设置横竖屏了解下好了 设置横屏和竖屏的方法: 方法一&#x…...

java spring cloud 企业电子招标采购系统源码:营造全面规范安全的电子招投标环境,促进招投标市场健康可持续发展 tbms
项目说明 随着公司的快速发展,企业人员和经营规模不断壮大,公司对内部招采管理的提升提出了更高的要求。在企业里建立一个公平、公开、公正的采购环境,最大限度控制采购成本至关重要。符合国家电子招投标法律法规及相关规范,以…...
【Java】2021 RoboCom 机器人开发者大赛-高职组(初赛)题解
7-1 机器人打招呼 机器人小白要来 RoboCom 参赛了,在赛场中遇到人要打个招呼。请你帮它设置好打招呼的这句话:“ni ye lai can jia RoboCom a?”。 输入格式: 本题没有输入。 输出格式: 在一行中输出 ni ye lai can jia Robo…...
汽车制造业上下游协作时 外发数据如何防泄露?
数据文件是制造业企业的核心竞争力,一旦发生数据外泄,就会给企业造成经济损失,严重的,可能会带来知识产权剽窃损害、名誉伤害等。汽车制造业,会涉及到重要的汽车设计图纸,像小米发送汽车设计图纸外泄事件并…...
H13-922题库 HCIP-GaussDB-OLAP V1.5
**H13-922 V1.5 GaussDB(DWS) OLAP题库 华为认证GaussDB OLAP数据库高级工程师HCIP-GaussDB-OLAP V1.0自2019年10月18日起,正式在中国区发布。当前版本V1.5 考试前提: 掌握基本的数据库基础知识、掌握数据仓库运维的基础知识、掌握基本Linux运维知识、…...
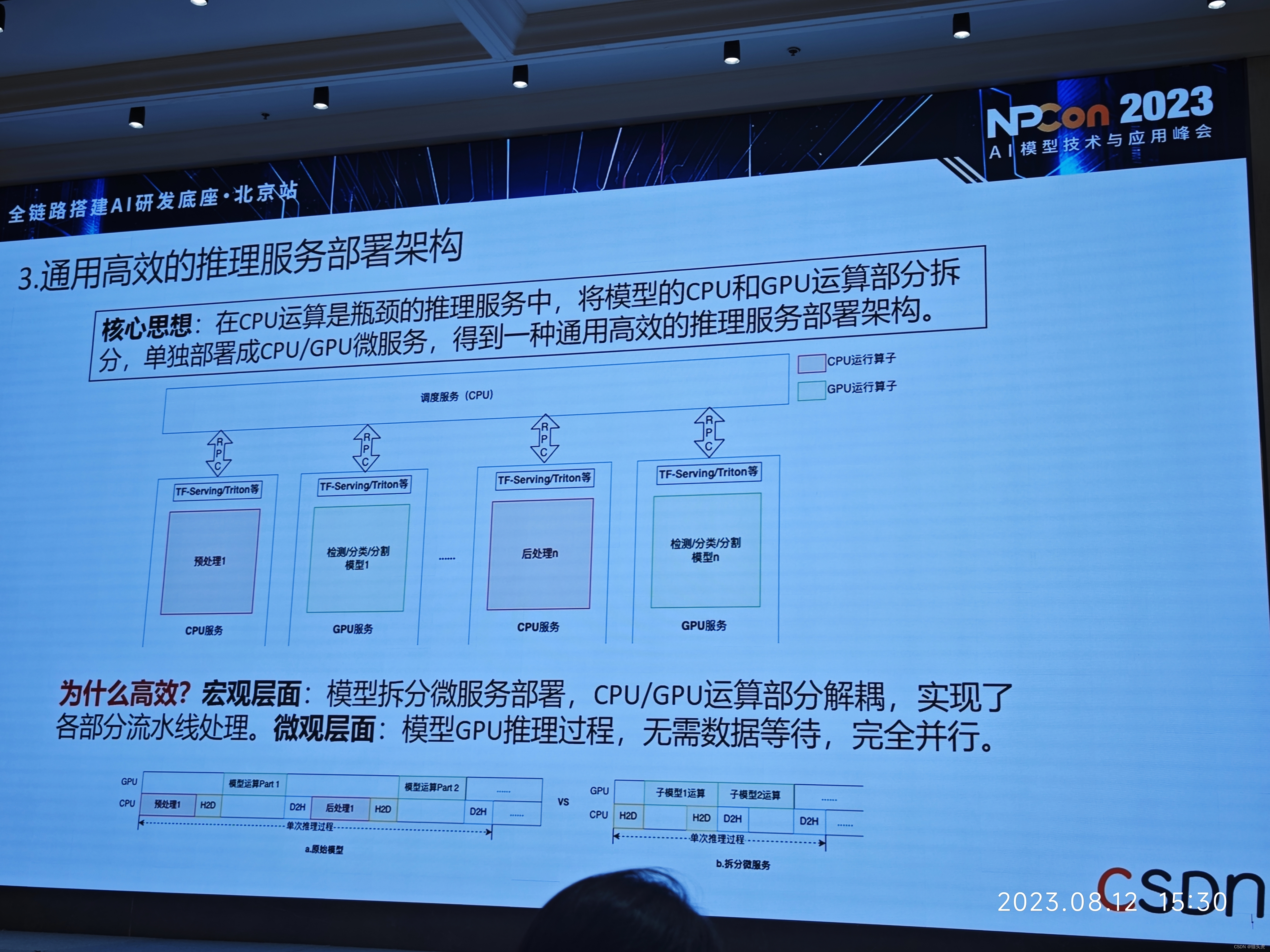
美团视觉GPU推理服务部署架构优化实战
🌷🍁 博主 libin9iOak带您 Go to New World.✨🍁 🦄 个人主页——libin9iOak的博客🎐 🐳 《面试题大全》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~ἳ…...
什么是前端框架?怎么学习? - 易智编译EaseEditing
前端框架是一种用于开发Web应用程序界面的工具集合,它提供了一系列预定义的代码和结构,以简化开发过程并提高效率。 前端框架通常包括HTML、CSS和JavaScript的库和工具,用于构建交互式、动态和响应式的用户界面。 学习前端框架可以让您更高效…...

logstash 原理(含部署)
1、ES原理 原理 使⽤filebeat来上传⽇志数据,logstash进⾏⽇志收集与处理,elasticsearch作为⽇志存储与搜索引擎,最后使⽤kibana展现⽇志的可视化输出。所以不难发现,⽇志解析主要还 是logstash做的事情 从上图中可以看到&#x…...

CSS中的position属性有哪些值,并分别描述它们的作用。
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ static⭐ relative⭐ absolute⭐ fixed⭐ sticky⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅!这个专栏是为那…...

视频联网报警厂家怎么找?
视频联网报警厂家怎么找?要找到联网报警设备厂家,可以按照以下步骤进行: 1. 在互联网上搜索:可以使用搜索引擎,如谷歌或百度,搜索关键词,如“联网报警设备厂家”、“安防设备厂家”等ÿ…...

配置文件优先级解读
目录 概述 同级目录application配置文件优先级 application 以及bootstrap 优先级 不同级目录配置文件优先级 外部配置加载顺序 概述 SpringBoot除了支持properties格式的配置文件,还支持另外两种格式的配置文件。三种配置文件格式分别如下: properties格式…...
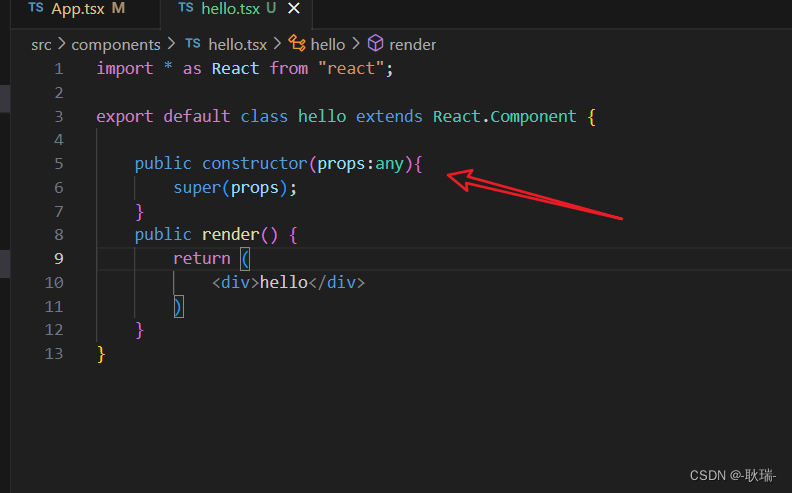
在 React+Typescript 项目环境中创建并使用组件
上文 ReactTypescript清理项目环境 我们将自己创建的项目环境 好好清理了一下 下面 我们来看组件的创建 组件化在这种数据响应式开发中肯定是非常重要的。 我们现在src下创建一个文件夹 叫 components 就用他专门来处理组件业务 然后 我们在下面创建一个 hello.tsx 注意 是t…...

UNIAPP中开发企业微信小程序
概述 需求为使用uni-app开发企业微信小程序。希望可以借助现成的uni-app框架,快速开发。遇到的问题是uni-app引入jweixin-1.2.0.js提示异常: Reason: TypeError: Cannot read properties of undefined (reading ‘title’)。本文中描述了如何解决该问题,…...

NGINX负载均衡及LVS-DR负载均衡集群
目录 LVS-DR原理搭建过程nginx 负载均衡 LVS-DR原理 原理: 1. 当用户向负载均衡调度器(Director Server)发起请求,调度器将请求发往至内核空间 2. PREROUTING链首先会接收到用户请求,判断目标IP确定是本机IPÿ…...

由于目标计算机积极拒绝,无法连接。 Could not connect to Redis at 127.0.0.1:6379
项目在启动时候报出redis连接异常 然后查看是redis 连接被计算机拒绝 解决方法 打开redis安装文件夹 先打开redis-servce.exe挂着,再打开redis-cli.exe 也不会弹出被拒接的问题了。而且此方法不用每次都去cmd里输入命令。...
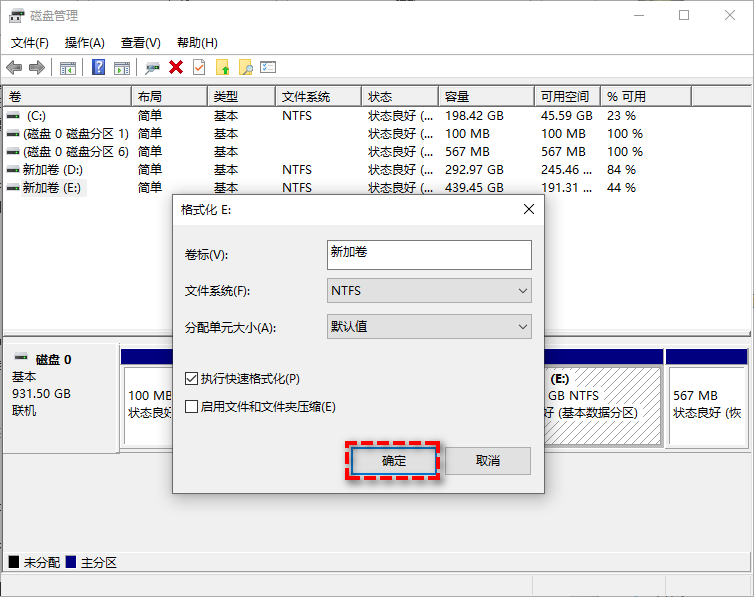
电脑提示数据错误循环冗余检查怎么办?
有些时候,我们尝试在磁盘上创建分区或清理硬盘时,还可能会遇到这个问题:数据错误循环冗余检查。这是如何导致的呢?我们又该如何解决这个问题呢?下面我们就来了解一下。 导致冗余检查错误的原因有哪些? 数据…...
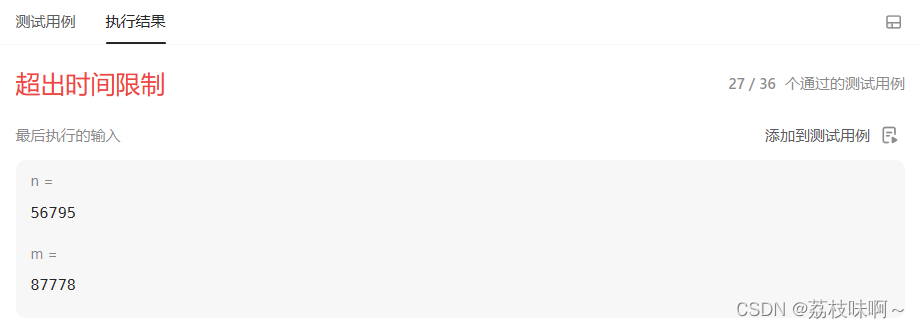
剑指offer62.圆圈中最后剩下的数字
这道题在算法课上的一个小故事上有一个类似的,就是一个军官打了败仗,带着他的几个兵逃到一个山洞,他们不想当俘虏想自杀,但是军官不想自杀但是又不好意思走,于是军官想了个办法,他们几个人围成一个圈&#…...

Python分享之 Spider
一、网络爬虫 网络爬虫又被称为网络蜘蛛,我们可以把互联网想象成一个蜘蛛网,每一个网站都是一个节点,我们可以使用一只蜘蛛去各个网页抓取我们想要的资源。举一个最简单的例子,你在百度和谷歌中输入‘Python,会有大量和…...

疯狂!工程师说要辞职去 Claude,老板让经理去挽留,结果经理变着法让工程师帮他内推。网友:这种例子太多了
①(北京时间)5 月 19 日深夜,OpenAI 联合创始人之一的 Karpathy 宣布加入 Anthropic。卡神咖位大,这条消息随后引发业界热议。此外,今年 3 月份还有另外核心人员 Max Schwarzer(OpenAI 前研究副总裁、GPT-5…...

从 0 到 1:用魔珐星云打造真实可用的智能健身私教【技术原理文章】
> 我在学习具身智能的实战文章,本文为技术文章,非广告一、健身交互痛点:传统数字人 / 健身工具缺失沉浸式陪伴式互动日常健身长期存在行业共性痛点:不管是纯视频课程,还是传统云端实时交互数字人,都难以…...

寄存器文件与SRAM:芯片设计中存储层次的核心差异与选型指南
1. 项目概述:从“存储”到“访问”的鸿沟在数字电路和处理器设计的核心地带,有两个名字经常被提及,却又常常让初学者甚至一些从业者感到混淆:Register File(寄存器文件)和SRAM(静态随机存取存储…...

三分钟完成Taotoken的PythonSDK配置与首次聊天补全调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 三分钟完成Taotoken的Python SDK配置与首次聊天补全调用 对于刚拿到Taotoken API Key的Python开发者来说,最迫切的需求…...

B/S架构模式在校园管理系统中的应用研究
随着校园信息化建设的不断普及,各类校园管理系统层出不穷,系统架构模式直接决定系统的使用便捷性、运维难度与适配场景。传统C/S架构即客户端/服务器架构,需要用户下载安装专属客户端,存在部署繁琐、升级困难、跨终端适配差、运维…...

神州细胞递表港交所 创新生物制药领军者构筑A+H双平台全球化版图
5月22日,北京神州细胞生物技术集团股份公司(证券代码:688520,证券简称:神州细胞)正式向香港联合交易所有限公司递交上市申请,迈出“AH”双资本平台布局的关键一步。公司以科创板上市为根基&…...
)
Sora 2提示词失效真相大起底(92%用户踩中的3类语义断层陷阱)
更多请点击: https://kaifayun.com 第一章:Sora 2提示词失效的底层归因与认知重构 Sora 2提示词失效并非表层的语法错误或格式偏差,而是源于其多模态对齐机制中语义解码器与时空生成器之间的结构性错配。当用户输入“雨夜东京涩谷十字路口&a…...

app应用接入广告的完整流程和方法:从零搭建可持续变现体系
随着移动互联网进入存量竞争阶段,用户流量增长趋于饱和,单纯依靠用户新增实现产品增值的模式已然失效。对于绝大多数免费工具、社交、资讯、游戏类 APP 而言,合规、稳定、可持续的广告变现,已经成为补齐产品商业闭环、维持产品长期…...
)
DeepSeek V2多模态支持真相(官方未公开的API隐藏能力全披露)
更多请点击: https://codechina.net 第一章:DeepSeek V2多模态支持真相(官方未公开的API隐藏能力全披露) DeepSeek V2 官方文档明确声明为纯文本大模型,但逆向分析其生产环境 API 流量与响应头后发现:其底…...

服务间鉴权的方式
服务间鉴权的方式1. API Key(静态密钥)Java 中如何生成随机数:什么是 LCG?/dev/random 和 /dev/urandom 详解1. Math.random() —— 绝对禁用2. java.util.Random —— 明文禁止(安全场景)3. java.security…...