2023年美赛C题Wordle预测问题三、四建模及Python代码详细讲解
更新时间:2023-2-19 16:30

相关链接
(1)2023年美赛C题Wordle预测问题一建模及Python代码详细讲解
(2)2023年美赛C题Wordle预测问题二建模及Python代码详细讲解
(3)2023年美赛C题Wordle预测问题三、四建模及Python代码详细讲解
(4)2023年美赛C题Wordle预测问题25页论文
1 问题三
这是 一个聚类分析问题
1.1 特征工程
这部分和问题一的一样
我提取了每个单词中每个字母位置的特征(如a编码为1,b编码为2,c编码为3依次类推,z编码为26,那5个单词的位置就填入相应的数值,类似于ont-hot编码)、元音的字母的频率(五个单词中元音字母出现了几次),辅音字母的频率(5个单词中辅音字母出现了几次),还有一个是单词的词性(形容词,副词,名词等等,这部分没有做)
1.2 模型建立、预测、评价
采用层次聚类模型,谱系聚类图绘制如下,可以将图明显的分为两种类别,分别为苦难和简单,说明黄色部分是数量较少,对应游戏的困难程度,绿色对应单词容易程度。
(1)层次聚类的合并算法
层次聚类的合并算法通过计算两类数据点间的相似性,对所有数据点中最为相似的两个数据点进行组合,并反复迭代这一过程。简单的说层次聚类的合并算法是通过计算每一个类别的数据点与所有数据点之间的距离来确定它们之间的相似性,距离越小,相似度越高。并将距离最近的两个数据点或类别进行组合,生成聚类树。
(2)欧几里德距离矩阵
层次聚类使用欧式距离来计算不同类别数据点间的距离(相似度)。我们在前面的几篇文章中都曾经介绍过欧氏距离的计算方法,本篇文章将通过创建一个欧式距离矩阵来计算和对比不同类别数据点间的距离,并对距离值最小的数据点进行组合。以下是欧式距离的计算公式。
D=(x1−y1)2+(x2−y2)2D= \sqrt{(x1-y1)^2+(x2-y2)^2} D=(x1−y1)2+(x2−y2)2
from sklearn.cluster import AgglomerativeClustering #导入sklearn的层次聚类函数
import matplotlib.pyplot as plt
from scipy.cluster.hierarchy import linkage,dendrogram
#这里使用scipy的层次聚类函数
Z = linkage(Train, method = 'ward', metric = 'euclidean') #谱系聚类图
P = dendrogram(Z, 0) #画谱系聚类图
# plt.savefig('img/AGG层次聚类.png',dpi=300)
plt.show()
将聚类分为两类并可视化到二维如下,并计算评价聚类效果的指标,轮廓系数。得分聚类轮廓系数为:0.22768071822489375。
import matplotlib.pyplot as plt
from sklearn.metrics import silhouette_score
from sklearn.decomposition import PCA
from sklearn.cluster import AgglomerativeClustering #导入sklearn的层次聚类函数
data1 = Trainclf1 = AgglomerativeClustering(n_clusters = 2, linkage = 'ward')
s = clf1.fit(data1)
pred1 = clf1.fit_predict(data1)
score1 = silhouette_score(data1, pred1)
print(f'聚类轮廓系数为:{score1}')
pca = PCA(n_components=2) # 输出两维
newData1 = pca.fit_transform(data1) # 载入N维x1, y1 = [], []
x2, y2= [], []
x3, y3= [], []
# 0表示简单,1表示困难
for index, value in enumerate(pred1):if value == 0:x1.append(newData1[index][0])y1.append(newData1[index][1])elif value == 1:x2.append(newData1[index][0])y2.append(newData1[index][1])
plt.figure(figsize=(10, 10))# #定义坐标轴
k = 200
plt.scatter(x1, y1,s=k)
plt.scatter(x2, y2,s=k)
plt.scatter(x3, y3,s=k)
plt.legend(['Hard','Easy'])
plt.savefig('img/2.png',dpi=300)
plt.show()
将模型输入EERIE的特征后,输出是困难。

模型验证:手动给数据集标注,将1-4次尝试的百分比,归一化后求和,如果大于0.6标注为困难,小于0.6标注为简单。将聚类类别结果和手动标注的类别进行计算准确率,准确率有0.73。
2 问题四
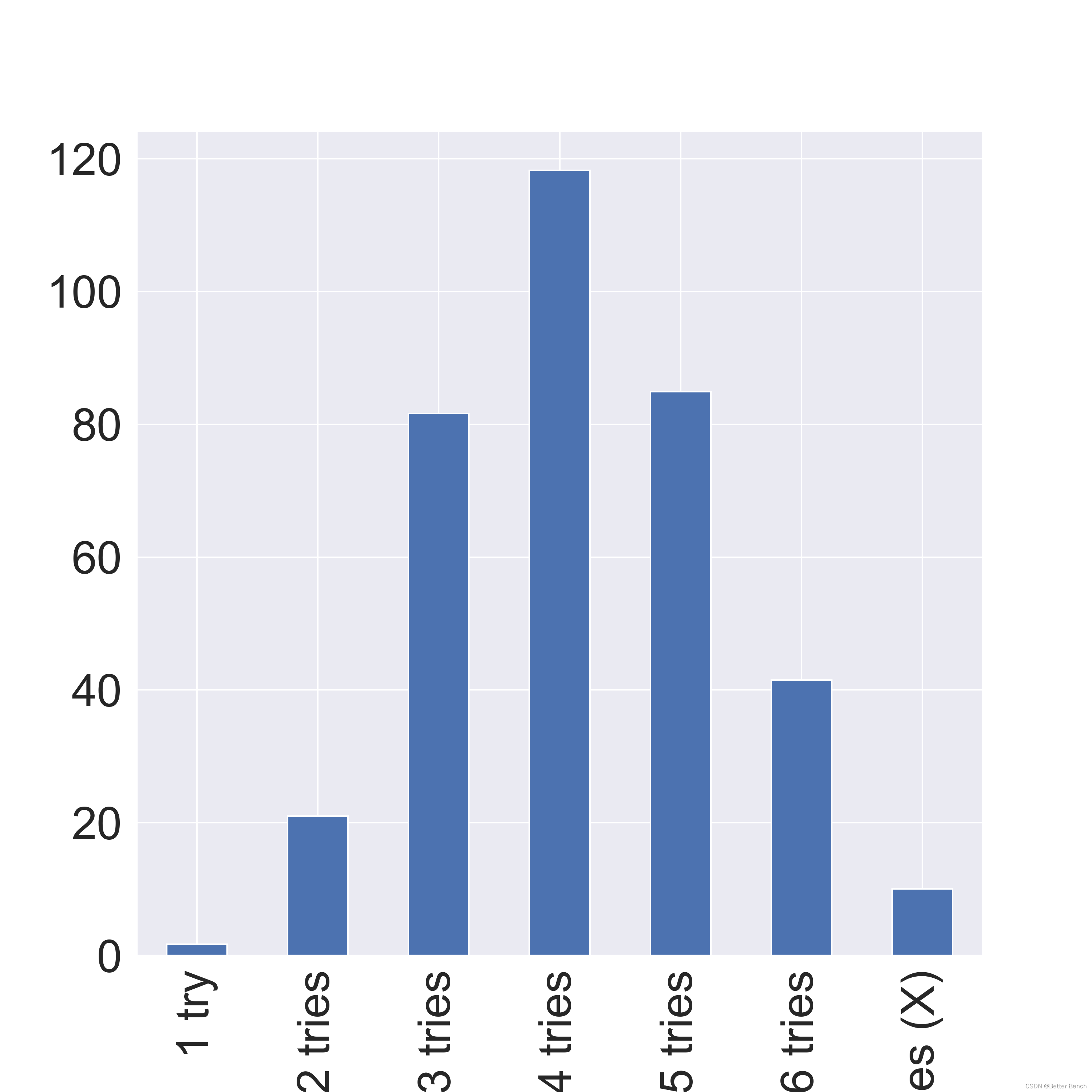
(1)分析了Number in hard mode趋势




(2)分析了几种百分比的占比情况

3 Code
Code获取,在浏览器中输入:betterbench.top/#/40/detail,或者Si我
1
剩下的问题一、二、三、四代码实现,在我主页查看,其他文章,或者在此文章的顶部点击查看。
相关文章:
2023年美赛C题Wordle预测问题三、四建模及Python代码详细讲解
更新时间:2023-2-19 16:30 相关链接 (1)2023年美赛C题Wordle预测问题一建模及Python代码详细讲解 (2)2023年美赛C题Wordle预测问题二建模及Python代码详细讲解 (3)2023年美赛C题Wordle预测问题三、四建模…...
相关性-回忆录(持续更新)
1.TODO方向 (1)数据增强:finetuning阶段需要大量人工标注样本,消耗时间和成本。用户点击数据作为弱监督学习,可以尝试图网络构建节点和边(query聚合); 使用展现未点击生成对抗网络进…...
使用Python实现屏幕截图)
(必备技能)使用Python实现屏幕截图
(必备技能)使用Python实现屏幕截图 文章目录 (必备技能)使用Python实现屏幕截图 一、序言二、环境配置 1、下载pyautogui包2、下载opencv-python包3、下载PyQt5包4、下载pypiwin32包 三、屏幕截屏源码与解析 1、使用pyautogui方法实现截屏2、使用PyQt方法实现截屏 a.获取窗口…...

「数据仓库」怎么选择现代数据仓库?
构建自己的数据仓库时要考虑的基本因素我们用过很多数据仓库。当我们的客户问我们,对于他们成长中的公司来说,最好的数据仓库是什么时,我们会根据他们的具体需求来考虑答案。通常,他们需要几乎实时的数据,价格低廉&…...
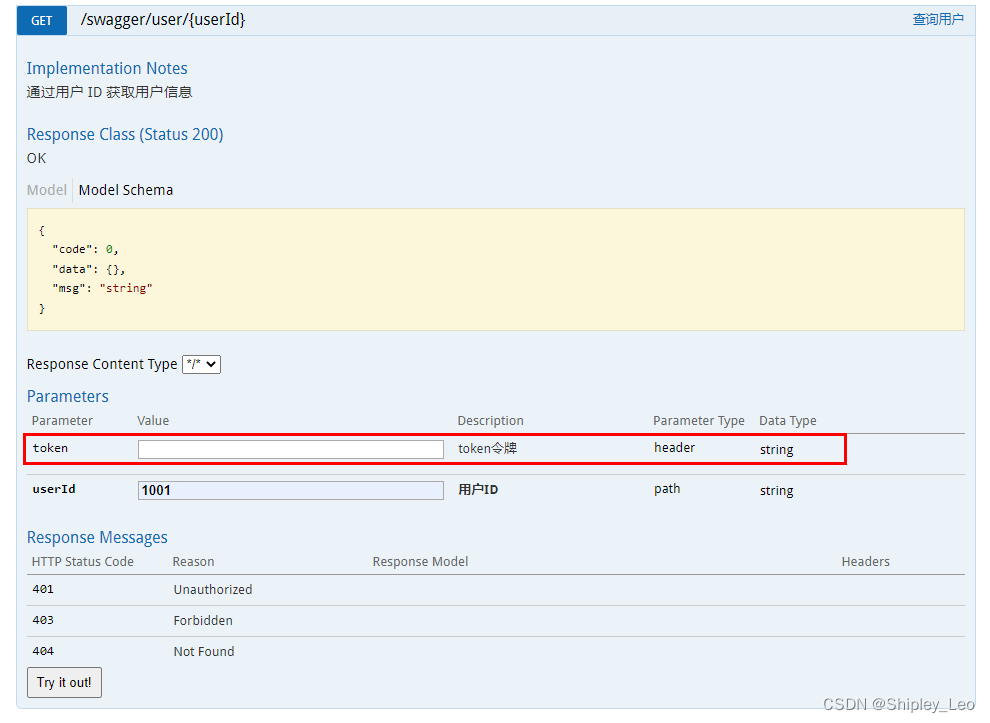
6.3 使用 Swagger 生成 Web API 文档
第6章 构建 RESTful 服务 6.1 RESTful 简介 6.2 构建 RESTful 应用接口 6.3 使用 Swagger 生成 Web API 文档 6.4 实战:实现 Web API 版本控制 6.3 使用 Swagger 生成 Web API 文档 高质量的 API 文档在系统开发的过程中非常重要。本节介绍什么是 Swaggerÿ…...
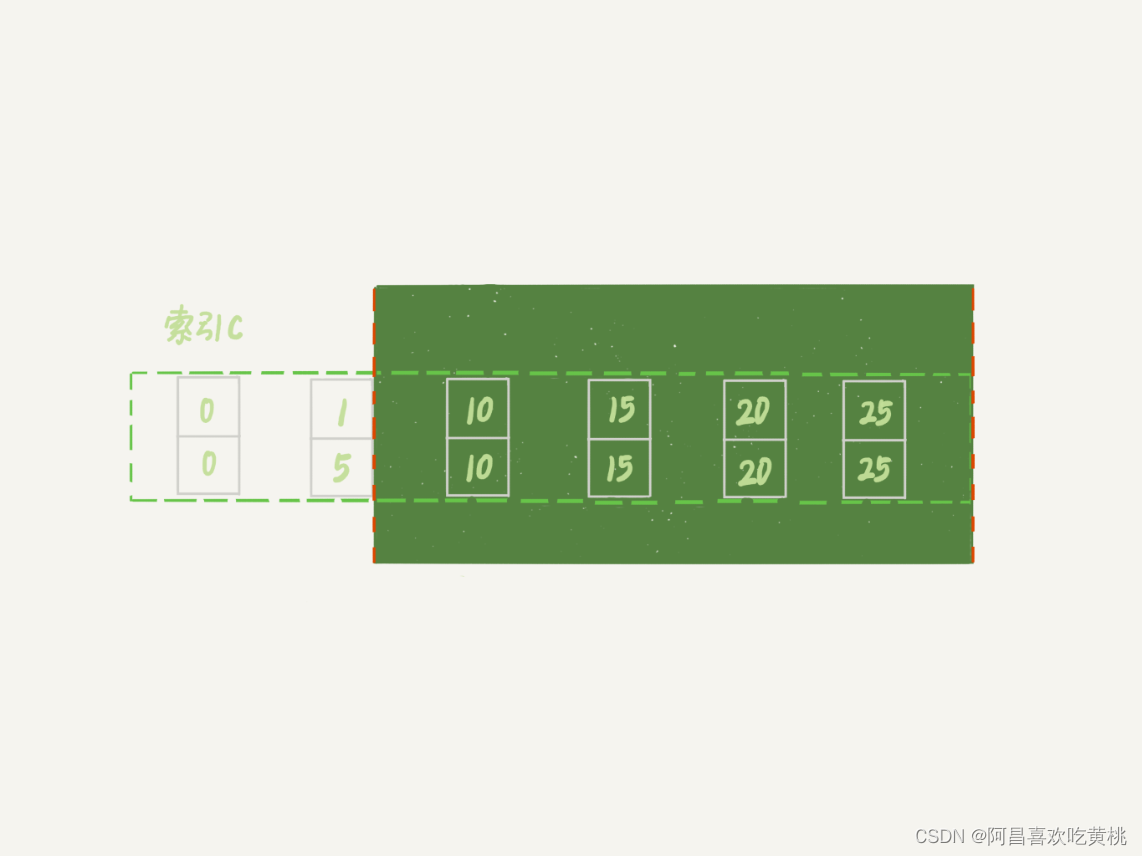
Day894.加锁规则的一些问题 -MySQL实战
加锁规则的一些问题 Hi,我是阿昌,今天学习记录的是关于加锁规则的一些问题的内容。 加锁规则,这个规则中,包含了两个“原则”、两个“优化”和一个“bug”: 原则 1:加锁的基本单位是 next-key lock。nex…...
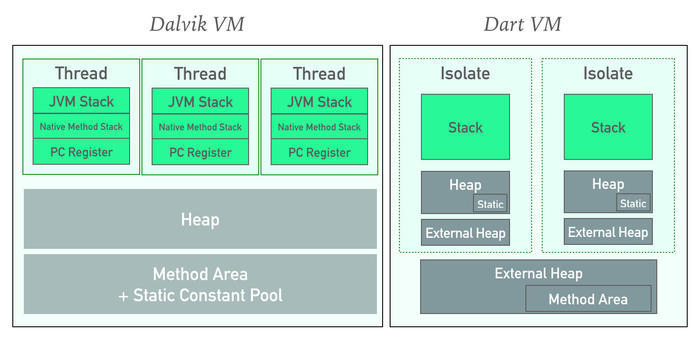
【Flutter入门到进阶】Dart进阶篇---Dart异步编程
1 并行与并发的编程区别 1.1 并发与并行 1.1.1 说明 我们举个例子,如果有条高速公路 A 上面并排有 8 条车道,那么最大的并行车辆就是 8 辆此条高速公路 A 同时并排行走的车辆小于等于 8 辆的时候,车辆就可以并行运行。 CPU 也是这个原理,一个 CPU 相当于一个高速公路 A,核心数…...
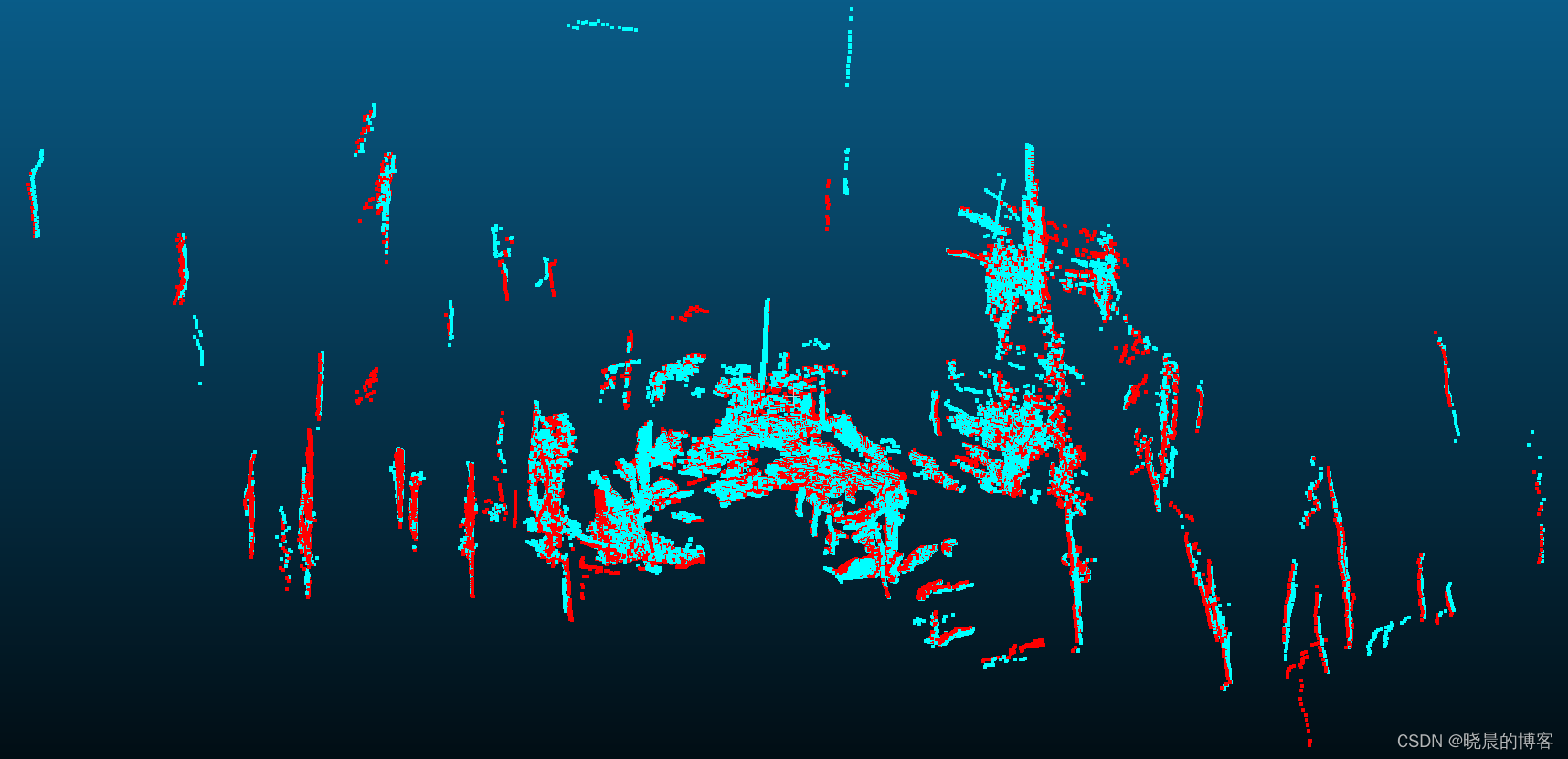
点云配准方法原理(NDT、ICP)
配准是点云处理中的一个基础问题,众多学者此问题进行了广泛而深入的研究,也出现了一系列优秀成熟的算法,在三维建模、自动驾驶等领域发挥着重要的作用。 本文主要介绍粗配准NDT (Normal Distribution Transform) 与 精配准ICP (Iterative Cl…...

大规模 IoT 边缘容器集群管理的几种架构-0-边缘容器及架构简介
📚️Reference: IoT 边缘计算系列文章 什么是边缘容器? 边缘容器的概念 边缘容器是分散的计算资源,尽可能靠近最终用户或设备,以减少延迟、节省带宽并增强整体数字体验。 可以访问互联网的设备数量每天都在增加。有包括但不限于…...
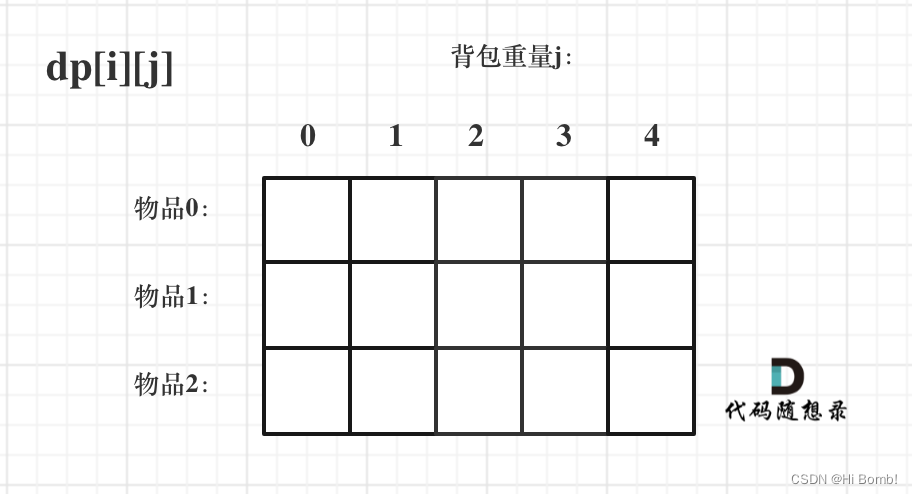
代码随想录算法训练营第45天动态规划 背包基础 1 2、 416. 分割等和子集
文章目录01背包基础 (二维数组)思路递推公式初始化遍历顺序一维dp数组(滚动数组)一维数组的递推公式遍历顺序LeetCode 416. 分割等和子集思路总结01背包基础 (二维数组) 思路 根据动态规划五部进行分析&a…...
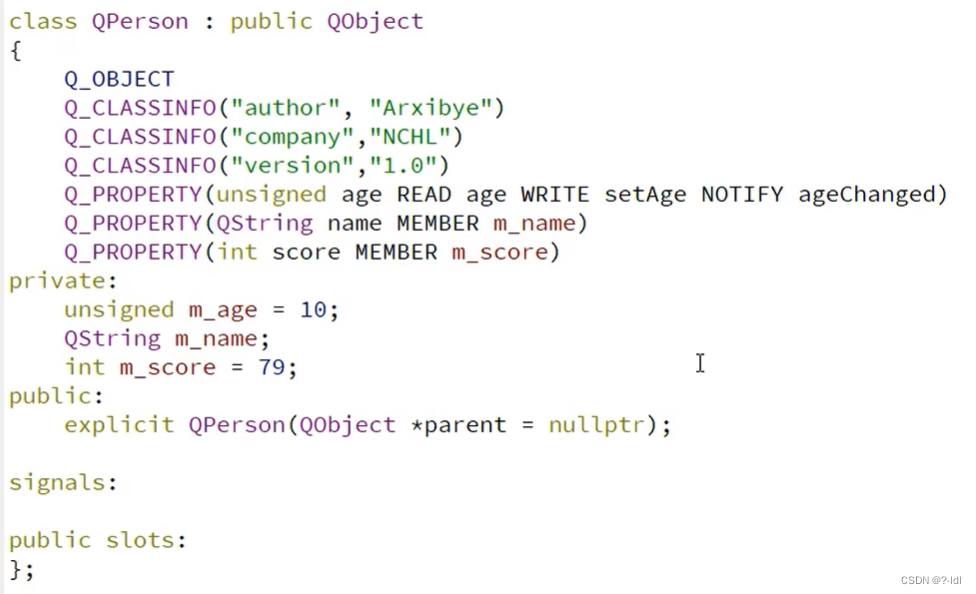
QT学习记录(六)类对象属性
类对象属性用来描述类对象的一些信息和当前的状态。类对象属性可以由类的编写者在编写类的时候定义,也可以由类的使用者在使用对象的时候定义。 由类的编写者定义 QPROPERTY()宏就是用来定义一个对象属性。 以第二行属性举例 QPROPERTY(bool enabled READ isEnabl…...

Spring Cloud Alibaba从搭建到源码完整进阶教程
微服务简介 Spring Cloud Alibaba 微服务简介 Nacos注册中心配置中心 Spring Cloud Nacos实战(一)- 下载和安装 Spring Cloud Nacos实战(二)- 服务提供者注册 Spring Cloud Nacos实战(三)- 服务消费者…...
Spring Cloud Nacos实战(一)- 下载和安装
Spring Cloud Alibaba Nacos下载和安装 Nacos介绍 Nacos(Naming Configuration Service) 是一个易于使用的动态服务发现、配置和服务管理平台,用于构建云原生应用程序 服务发现是微服务架构中的关键组件之一。Nacos 致力于帮助您发现…...

深入理解设备像素比
文章目录参考描述像素分辨率显示分辨率图像分辨率物理分辨率分辨率单位(仅部分)DPIPPI设备像素比设备物理像素设备独立像素设备像素比产生放大与缩小尾声参考 项目描述关于物理像素、逻辑像素(css像素)、分辨率、像素比的超详细讲…...
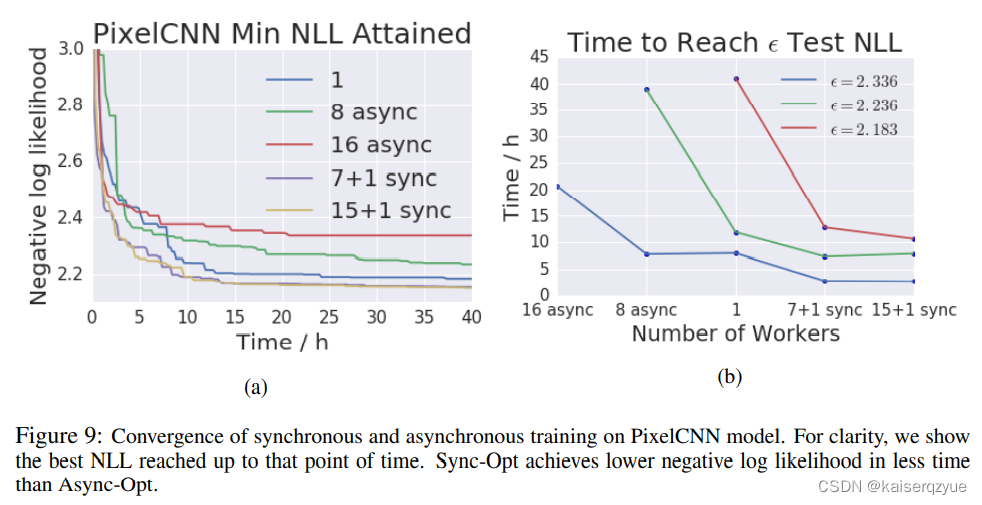
Revisiting Distributed Synchronous SGD 带有Back-up机制的分布式同步SGD方法 论文精读
论文链接:Revisiting Distributed Synchronous SGD ABS 本文介绍了用于分布式机器学习的同步和异步SGDSGDSGD,同时指出各自的缺点:stragglersstragglersstragglers和stalenessstalenessstaleness。 同时为了解决同步SGDSGDSGD存在straggle…...
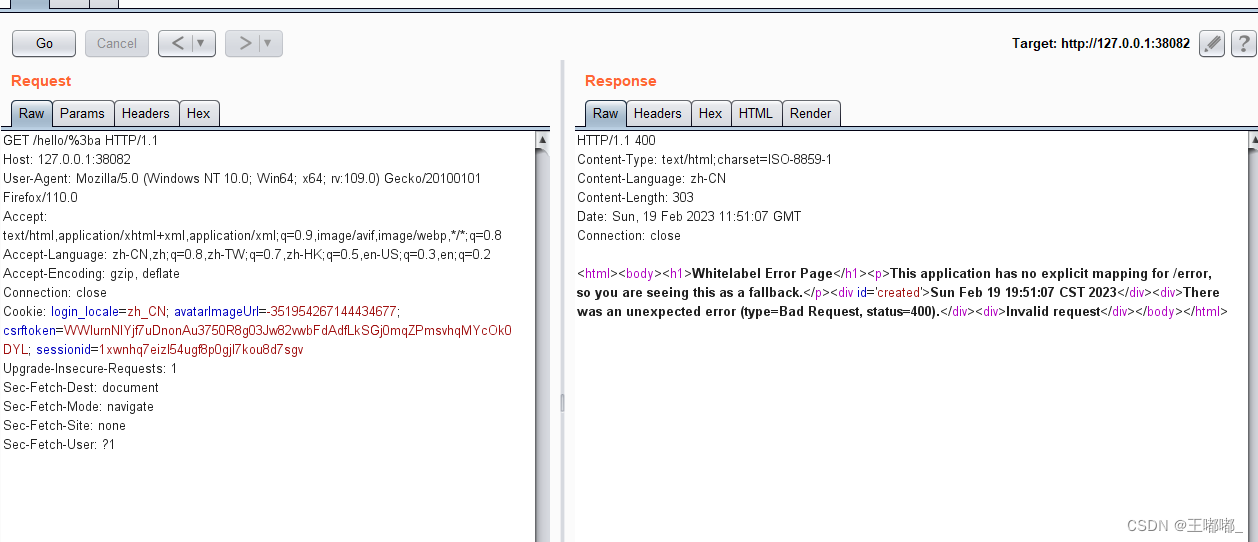
shiro CVE-2020-13933
0x00 前言 同CVE-2020-1957,补充一下笔记,在CVE-2020-1957的基础上进行了绕过。 影响版本:Apache Shiro < 1.6.0 环境搭建参考:shiro CVE-2020-1957 0x01 漏洞复现 CVE-2020-13933中使用%3b绕过了shiro /*的检测方式&…...
斐波那契数列(递归+迭代)
目录什么是斐波那契数列递归写法使用递归写法的缺点迭代写法(效率高)什么是斐波那契数列 斐波那契数列(Fibonacci sequence),又称黄金分割数列,因数学家莱昂纳多斐波那契(Leonardo Fibonacci)以兔子繁殖为例…...

2022黑马Redis跟学笔记.实战篇(六)
2022黑马Redis跟学笔记.实战篇 六4.7.达人探店功能4.7.1.分享探店图文1. 达人探店-发布探店笔记2. 达人探店-查看探店笔记4.7.2.点赞功能4.7.3.基于List实现点赞用户列表TOP104.7.4.基于SortedSet实现点赞排行榜4.8.关注列表4.8.1.关注列表实现原理4.8.2.添加关注1. 好友关注-关…...
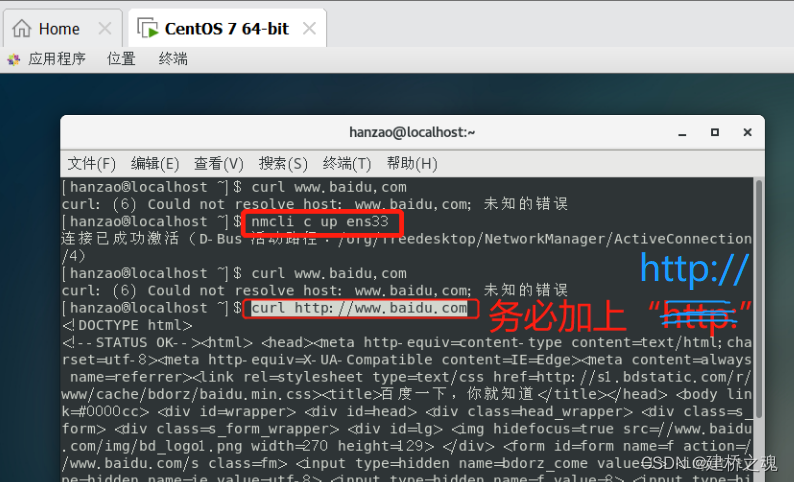
Linux-VMware常用设置(时间+网络)及网络连接激活失败解决方法-基础篇②
目录一、设置时间二、网络设置1. 激活网卡方法一:直接启动网卡(仅限当此)方法二:修改配置文件(永久)2. 将NAT模式改为桥接模式什么是是NAT模式?如何改为桥接模式?三、虚拟机网络连接…...

vue3学习总结1
一.vue3与vue2相比带来哪些变化?a.性能的提升(包括打包大小减少,初次渲染的速度加快,更新渲染速度加快,内存减少)b.源码的升级(响应式的原理发生了变化,由原来的defineProperty变成了…...

ONLYOFFICE集成踩坑实录:90%的“内容丢失”和“版本已更新”都因为document.key用错了
在集成OnlyOffice DocumentServer的过程中,很多开发者都会遇到两个非常典型的问题: 多人协同编辑后,再次打开文档发现内容缺失重新打开文档时提示“文档版本已更新” 很多人会认为: 是 ONLYOFFICE 不稳定是缓存机制异常是协同编…...

基于ChatGee框架的KakaoTalk ChatGPT机器人部署与定制指南
1. 项目概述:一个为KakaoTalk量身定制的ChatGPT机器人 如果你在韩国工作、生活,或者你的用户群体主要在韩国,那么KakaoTalk(카카오톡)这款国民级即时通讯应用,你一定不陌生。它几乎覆盖了韩国所有的智能手…...

nRF52840开发板移植CircuitPython实战:从编译到蓝牙应用
1. 项目概述与核心价值 如果你手头有一块基于 Nordic nRF52840 芯片的开发板,比如官方的 nRF52840-DK 或者 Particle 的 Argon/Xenon,并且厌倦了在 C 语言和复杂的 SDK 中挣扎,想用 Python 的简洁语法快速实现一个蓝牙传感器节点或者物联网设…...

精准测试:未来已来,只是尚未流行
一、从“全量覆盖”到“精准打击”:测试范式的必然转向 在软件测试领域,有一个根深蒂固的信仰:测试得越全面,质量就越高。这种思维催生了庞大的测试用例库、漫长的回归周期和不断膨胀的测试资源投入。然而,随着系统复…...

【omc】Claude Code 必备神器:Oh-My-ClaudeCode 让你的 AI 编程效率翻倍
用过 Claude Code 的人都知道,它很强。 但强归强,用起来有不少痛点:Token 烧得快、任务动不动崩溃、复杂项目搞不定。 Oh-My-ClaudeCode(OMC)就是来治这些病的。一、为什么需要 OMC? 原生 Claude Code 的三…...

设计工程化实践:将设计思维转化为开发者技能的工具探索
1. 项目概述:当设计思维遇上代码技能最近在GitHub上看到一个挺有意思的项目,叫Arthurescc/design-fusion.skill。光看这个名字,就让我这个在设计和开发交叉领域摸爬滚打了十来年的老手眼前一亮。“Design Fusion”直译是“设计融合”…...

环境配置与基础教程:保姆级教程:在 Mac M 芯片上利用 MPS 加速 YOLO 训练与推理的完整环境搭建
写在前面:为什么你的 Mac 也能跑深度学习? 几年前,如果有人告诉你用 MacBook 训练深度学习模型,你大概会笑出声。那时候 Mac 上的 PyTorch 只能依赖 CPU 吭哧吭哧地算,训练一个小模型都要等到天荒地老。但自从 Apple Silicon 芯片(M1、M2、M3、M4,以及最新的 M5)横空出…...

五分钟完成python脚本对接taotoken多模型api的教程
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 五分钟完成Python脚本对接Taotoken多模型API的教程 对于希望快速接入多个主流大模型的Python开发者而言,Taotoken提供的…...

OpenClaw爬虫框架Docker化实践:从环境封装到生产部署
1. 项目概述:当“OpenClaw”遇见Docker最近在折腾一个挺有意思的项目,叫“OpenClaw”。这名字听起来有点酷,对吧?它本质上是一个网络爬虫框架,但设计理念和常见的Scrapy、Puppeteer这些不太一样。OpenClaw更侧重于“规…...

GAIA-DataSet:构建智能运维研究的数据基石与算法验证平台
GAIA-DataSet:构建智能运维研究的数据基石与算法验证平台 【免费下载链接】GAIA-DataSet GAIA, with the full name Generic AIOps Atlas, is an overall dataset for analyzing operation problems such as anomaly detection, log analysis, fault localization, …...