Linux驱动入门(6.2)按键驱动和LED驱动 --- 将逻辑电平与物理电平分离
前言
(1)在学习完Linux驱动入门(6)LED驱动—设备树之后,我们发现一个问题,设备树明明的gpios信息明明有三个元素gpios = <&gpio5 3 GPIO_ACTIVE_LOW>; &gpio5 3 用来确定控制那个引脚,而GPIO_ACTIVE_LOW究竟有什么用呢?
(2)通过前面的实验,我们发现,GPIO_ACTIVE_LOW似乎是没有使用上的。那么写上这个有什么用呢?
(3)Linux设备树中既然设置了这个元素,那么肯定是有意义的。接下来,我将讲解Linux中逻辑电平和物理电平之间的关系。
逻辑电平的意义
为什么需要逻辑电平
(1)在前面的代码里面,我们发现如果这个LED驱动硬件发生了改动,比如GND和VCC位置调整一下,代码就要进行比较多的改动。因为Linux的代码很多,很容易漏掉某个地方,导致硬件上的小改动,明明写好的软件又要做很多工作,调试,检查。
(2)Linux要与硬件进行强隔离,所以提出了逻辑电平的概念。
逻辑电平和物理电平的关系
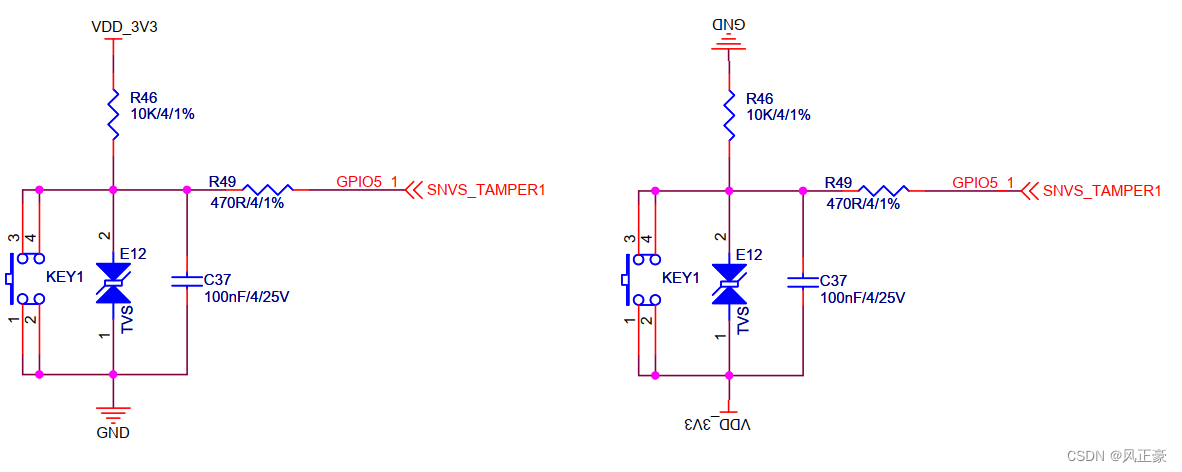
(1)物理电平就是真实的电压值,物理电平1是指真实的高电平。例如TTL标准中,如果引脚接受到的是3.3V,那么就是1。如果引脚接受到的是0V,那么就是0。
(2)逻辑电平就是抽象出来的逻辑状态,逻辑电平的1是指有效电平。例如,上面左边的图,按键被按下,引脚为低电平,因此低电平是有效电平,对于这个按键的逻辑电平来说,1就是低电平。而右边这张图相反。
引入逻辑电平的好处
(1)引入逻辑电平之后,如果硬件只是有效电平发生了改变,驱动程序上就不再需要改动了。我们只需要将设备树中的gpios = <&gpio5 3 GPIO_ACTIVE_LOW>;改成gpios = <&gpio5 3 GPIO_ACTIVE_HIGH>;即可。
(2)这样做,能够实现软件和硬件上的强隔离作用,让同一个驱动程序对于各种类似的硬件上有更高适配能力。
编程中与上文的区别
(1)在讲解Linux驱动入门(4)LED驱动的时候,我提及了几个GPIO子系统函数进行了讲解介绍。而本文需要讲解的函数,其本质上也不过是这个几个函数的微调,底层调用的函数大差不差,感兴趣的可以自行阅读源码。既然只是微调,为什么不把老版本的删了?这当然是为了兼容老版本代码,所以没有删除他们。
of_get_gpio_flags()获取GPIO信息
函数介绍
(1)在上文中,我们获取gpio引脚号是调用的of_get_gpio()这个函数,而本文是使用的of_get_gpio_flags()函数。
(2)如果阅读源码会发现,of_get_gpio()就是调用的of_get_gpio_flags()函数,不过第三个参数是传入的一个空指针,并没有获取有效电平信息。

/* 作用 : 从设备树中获取GPIO引脚的标志信息的函数* 传入参数 :* np :设备节点* index : 节点中的索引* flags : 存储有效电平的信息* 返回值 : GPIO的引脚号
*/
int of_get_gpio_flags(struct device_node *np, int index, enum of_gpio_flags *flags)原来获取GPIO信息
gpios[i].gpio = of_get_gpio(np, i); //获得gpio信息
现在获取GPIO信息
gpios[i].gpio = of_get_gpio_flags(np, i, &flag);
devm_gpio_request_one()设置引脚初始化
函数介绍
(1)在上文中,我们是调用gpio_request()函数申请到GPIO,然后使用gpio_direction_output()函数将引脚设置成输出。
(2)现在这里只需要调用一个devm_gpio_request_one()函数即可。
(3)虽然这里调用的函数少了,但是需要进行的操作也变多了。
/* 作用 : 从设备树中获取GPIO引脚的标志信息的函数* 传入参数 :* dev :要申请GPIO的设备* gpio : 引脚号* flags : 有效电平,引脚的输入输出方向,默认输出电平(物理电平)信息* label : 注册GPIO时候的名字* 返回值 : 如果返回值小于0,表示申请失败
*/
int devm_gpio_request_one(struct device *dev, unsigned gpio,unsigned long flags, const char *label)
原来设置GPIO
/*------------GPIO设置成默认低电平输出------------*/
//申请指定GPIO引脚,申请的时候需要用到名字
err = gpio_request(gpios[i].gpio, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
//如果GPIO申请成功,设置输出低电平
gpio_direction_output(gpios[i].gpio, 0);
/*------------GPIO设置成默认高电平输出------------*/
//申请指定GPIO引脚,申请的时候需要用到名字
err = gpio_request(gpios[i].gpio, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
//如果GPIO申请成功,设置输出高电平
gpio_direction_output(gpios[i].gpio, 1);
/*------------GPIO设置成输入------------*/
//申请指定GPIO引脚,申请的时候需要用到名字
err = gpio_request(gpios[i].gpio, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
//如果GPIO申请成功,设置为输入引脚
gpio_direction_input(gpios[i].gpio);
现在设置GPIO
/*------------GPIO设置成默认低电平输出(注意,这里是物理电平)------------*/
gpios[i].flag = GPIOF_OUT_INIT_LOW; //将GPIO设置成默认低电平输出(注意,这里是物理电平)
if (flag & OF_GPIO_ACTIVE_LOW) //判断有效电平是否为低电平
{gpios[i].flag |= GPIOF_ACTIVE_LOW;
}
printk("gpios[%d].flag is %d \r\n",i,gpios[i].flag);
err = devm_gpio_request_one(&pdev->dev, gpios[i].gpio, gpios[i].flag, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
/*------------GPIO设置成默认高电平输出(注意,这里是物理电平)------------*/
gpios[i].flag = GPIOF_OUT_INIT_HIGH; //将GPIO设置成默认高电平输出(注意,这里是物理电平)
if (flag & OF_GPIO_ACTIVE_LOW) //判断有效电平是否为低电平
{gpios[i].flag |= GPIOF_ACTIVE_LOW;
}
printk("gpios[%d].flag is %d \r\n",i,gpios[i].flag);
err = devm_gpio_request_one(&pdev->dev, gpios[i].gpio, gpios[i].flag, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
/*------------GPIO设置成输入------------*/
gpios[i].flag = GPIOF_IN; //将引脚设置成输入方向
if (flag & OF_GPIO_ACTIVE_LOW) //判断有效电平是否为低电平
{gpios[i].flag |= GPIOF_ACTIVE_LOW;
}
printk("gpios[%d].flag is %d \r\n",i,gpios[i].flag);
err = devm_gpio_request_one(&pdev->dev, gpios[i].gpio, gpios[i].flag, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
gpiod_set_value()设置引脚输出电平(逻辑电平)
函数介绍
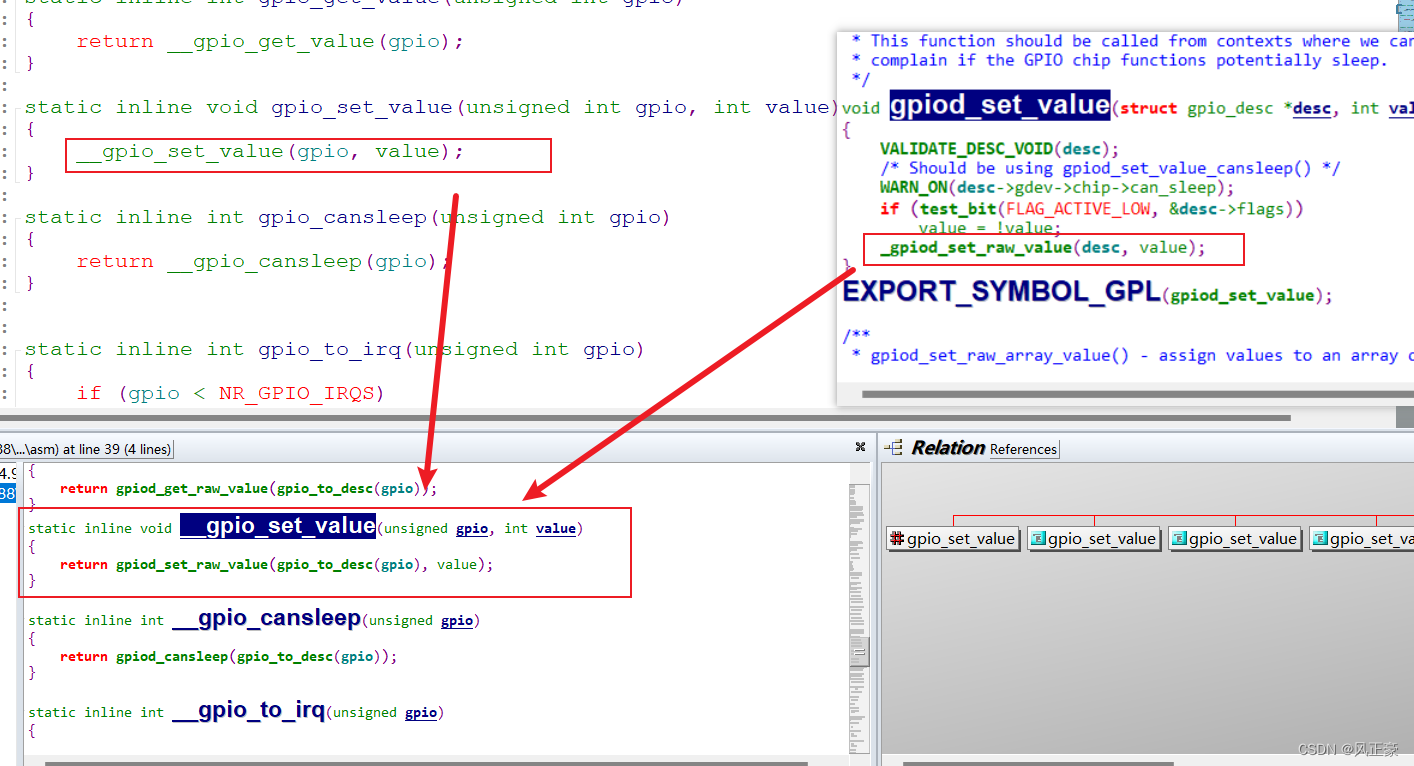
(1)上文我们调用gpio_set_value()函数是设置的物理电平,而本文将会使用gpiod_set_value()函数设置逻辑电平。
(2)感兴趣的朋友可以看看gpio_set_value()函数和gpiod_set_value()函数的底层实现,我们会发现他们都调用了gpiod_set_raw_value()函数。只不过gpio_set_value()是直接将自己的参数传递进去,而gpiod_set_value()函数会判断有效电平信息,然后根据有效电平信息翻转Value值。
(3)这里需要注意的一点是,gpiod_set_value()函数第一参数传入的是gpio_desc结构体类型指针,而gpio_set_value()传入的是引脚号。我们可以调用gpio_to_desc()函数利用引脚号获得gpio_desc结构体类型指针。
原来设置GPIO输出电平(物理电平)
/* gpios[(int)tmp_buf[0]].gpio是引脚号* tmp_buf[1]是要设置的物理电平信息
*/
gpio_set_value(gpios[(int)tmp_buf[0]].gpio, tmp_buf[1]);
现在设置GPIO输出电平(逻辑电平)
(1)因为gpiod_set_value()函数第一个参数需要传入的是一个gpio_desc结构体。所以我在probe函数中获取,并且存入gpios结构体中。
(2)这里需要注意了,我们现在设置的是逻辑电平了。如果你的LED需要低电平点亮,你在设备树中设置了有效电平是低电平。那么现在gpiod_set_value()函数传入的第二个值,如果是1,输出的其实是低电平!!!
/*---- 在probe函数中我们使用了gpio_to_desc函数获得gpio_desc结构体 */
gpios[i].gpiod = gpio_to_desc(gpios[i].gpio);
/*---- 下面这段是在驱动程序中write函数中修改 */
/* gpios[(int)tmp_buf[0]].gpio是引脚号* tmp_buf[1]是要设置的物理电平信息
*/
gpiod_set_value(gpios[(int)tmp_buf[0]].gpiod, tmp_buf[1]);
需要注意gpio_desc结构体无法被访问
(1)这里有一个注意的点,gpio_desc结构体是Linux内核结构体。他与我们所编写的C文件编译环境是隔离的。所以我们没有访问gpio_desc结构体权限。这个问题卡了我很久,望各位了解。
(2)如果有头铁的兄弟说,哎,我就是牛逼,我就要访问,怎么滴?可以的,我也给头铁的兄弟们提供思路。
// 在对于的内核文件中写入下面这个宏,然后重新编译Linux内核。
EXPORT_SYMBOL(gpio_to_desc);gpiod_get_value()获得引脚电平(逻辑电平)
函数介绍
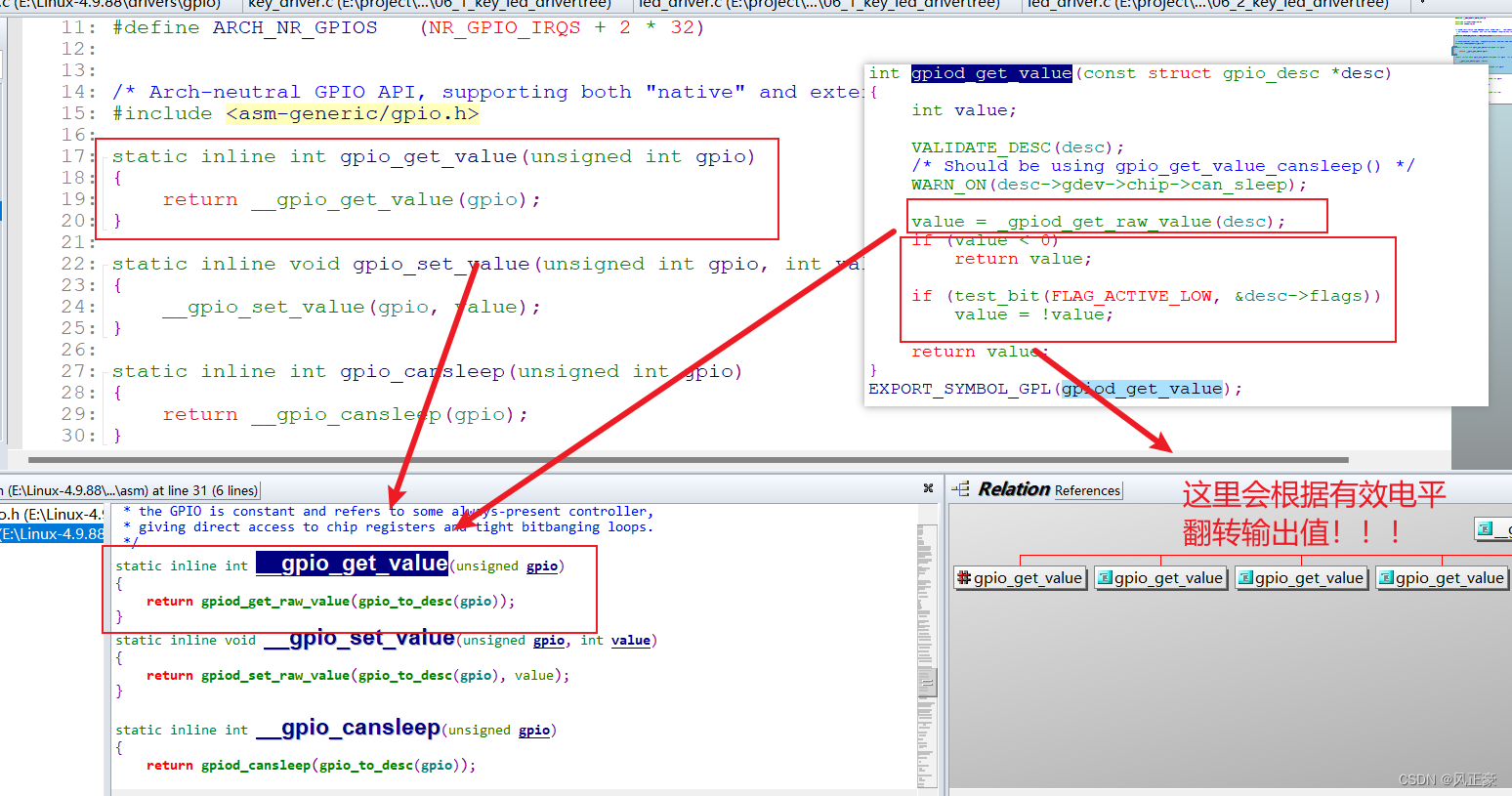
(1)同样的道理,我们阅读gpiod_get_value()和gpio_get_value()函数源码会发现,他们都会调用gpiod_get_raw_value()函数获取真实的物理电平。
(2)但是,gpiod_get_value()会根据设备树中设置的有效电平,翻转gpiod_get_raw_value()函数返回值。而gpio_get_value()函数则是直接将gpiod_get_raw_value()函数返回值输出。
(3)因此gpiod_get_value()返回的是逻辑电平,gpio_get_value()返回的是物理电平。
原来获取GPIO电平(物理电平)
tmp_buf[1] = gpio_get_value(gpios[(int)tmp_buf[0]].gpio);
现在获取GPIO电平(逻辑电平)
(1)同输出电平一样,如果设备树中,LED驱动设置的有效电平是低电平。那么我们调用gpiod_get_value()函数发现LED的物理电平是高电平的时候,他返回的却是0!
tmp_buf[1] = gpiod_get_value(gpios[(int)tmp_buf[0]].gpiod);
总结
(1)将逻辑电平和物理电平隔离之后,驱动文件不再需要修改。如果硬件产生了更换,也只需要修改设备树。
(2)编写应用程序的程序员,也不需要管LED点亮到底是高电平还是低电平,在他眼里,输入1就是点亮,输入0就是熄灭。
相关文章:
Linux驱动入门(6.2)按键驱动和LED驱动 --- 将逻辑电平与物理电平分离
前言 (1)在学习完Linux驱动入门(6)LED驱动—设备树之后,我们发现一个问题,设备树明明的gpios信息明明有三个元素gpios <&gpio5 3 GPIO_ACTIVE_LOW>; &gpio5 3 用来确定控制那个引脚…...
CentOS系统环境搭建(十四)——CentOS7.9安装elasticsearch-head
centos系统环境搭建专栏🔗点击跳转 关于node的安装请看上一篇CentOS系统环境搭建(十三)——CentOS7安装nvm,🔗点击跳转。 CentOS7.9安装elasticsearch-head 文章目录 CentOS7.9安装elasticsearch-head1.下载2.解压3.修…...
设计HTML5图像和多媒体
在网页中的文本信息直观、明了,而多媒体信息更富内涵和视觉冲击力。恰当使用不同类型的多媒体可以展示个性,突出重点,吸引用户。在HTML5之前,需要借助插件为网页添加多媒体,如Adobe Flash Player、苹果的QuickTime等。…...

基于YOLOv8模型和Caltech数据集的行人检测系统(PyTorch+Pyside6+YOLOv8模型)
摘要 基于YOLOv8模型和Caltech数据集的行人检测系统可用于日常生活中检测与定位行人,利用深度学习算法可实现图片、视频、摄像头等方式的行人目标检测,另外本系统还支持图片、视频等格式的结果可视化与结果导出。本系统采用YOLOv8目标检测算法训练数据集…...

Flutter 宽高自适应
在Flutter开发中也需要宽高自适应,手动写一个工具类,集成之后在像素后面直接使用 px或者 rpx即可。 工具类代码如下: import dart:ui;class HYSizeFit {static double screenWidth 0.0;static double screenHeight 0.0;static double phys…...
LeetCode 0833. 字符串中的查找与替换
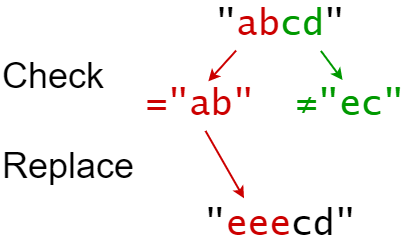
【LetMeFly】833.字符串中的查找与替换 力扣题目链接:https://leetcode.cn/problems/find-and-replace-in-string/ 你会得到一个字符串 s (索引从 0 开始),你必须对它执行 k 个替换操作。替换操作以三个长度均为 k 的并行数组给出:indices,…...
Redis对象和五种常用数据类型
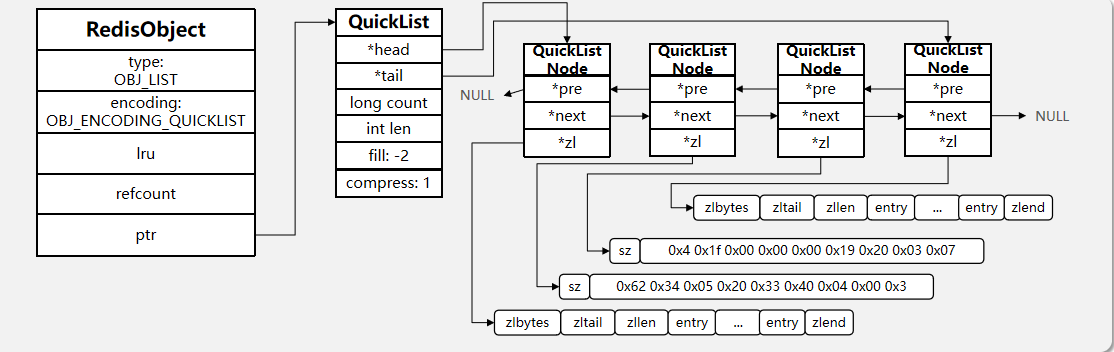
Redisobject 对象 对象分为键对象和值对象 键对象一般是string类型 值对象可以是string,list,set,zset,hash q:redisobj的结构 typedef struct redisObject { //类型 unsigned type:4; //编码 unsigned encoding:4; //指向底层实现…...

常用的Elasticsearch查询DSL
1.基本查询 GET /index_name/_search {"query": {"match": {"dispatchClass": "1"}} }2.多条件查询 GET /index_name/_search {"query": {"bool": {"must": [{"match": {"createUser&…...

计算机网络笔记
TCP有连接可靠服务 TCP特点: 1.TCP是面向连接的传输层协议; 2.每条TCP连接只能有两个端点,每条TCP连接是一对一的; 3.TCP提供可靠交付,保证传送数据无差错,不丢失,不重复且有序; 4.…...
高效反编译luac文件
对于游戏开发人员,有时候希望从一些游戏apk中反编译出源代码,进行学习,但是如果你触碰到法律边缘,那么你要非常小心。 这篇文章,我针对一些用lua写客户端或者服务器的编译过的luac文件进行反编译,获取其源代码的过程。 这里我不赘述如何反编译解压apk包的过程了,只说重点…...

密码湘军,融合创新!麒麟信安参展2023商用密码大会,铸牢数据安全坚固堡垒
2023年8月9日至11日,商用密码大会在郑州国际会展中心正式开幕。本次大会由国家密码管理局指导,中国密码学会支持,郑州市人民政府、河南省密码管理局主办,以“密码赋能美好发展”为主题,旨在推进商用密码创新驱动、前沿…...

关于视频监控平台EasyCVR视频汇聚平台建设“明厨亮灶”具体实施方案以及应用
一、方案背景 近几年来,餐饮行业的食品安全、食品卫生等新闻频频发生,比如某火锅店、某网红奶茶,食材以次充好、后厨卫生被爆堪忧,种种问题引起大众关注和热议。这些负面新闻不仅让餐饮门店的品牌口碑暴跌,附带的连锁…...

区块链系统探索之路:私钥的压缩和WIF格式详解
在前面章节中,我们详细介绍了公钥的压缩,在比特币网络中,一个私钥可以对应两个地址,一个地址是由未压缩公钥所生成的地址,另一个就是由压缩公钥所创建的地址,从公钥到区块链地址的转换算法,我们…...
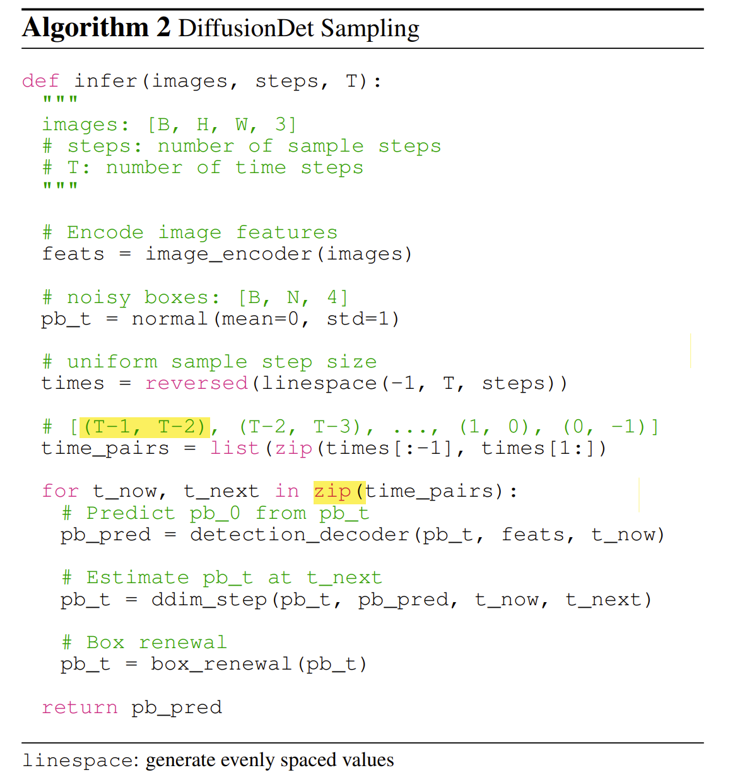
DiffusionDet: Diffusion Model for Object Detection
DiffusionDet: Diffusion Model for Object Detection 论文概述不同之处整体流程 论文题目:DiffusionDet: Diffusion Model for Object Detection 论文来源:arXiv preprint 2022 论文地址:https://arxiv.org/abs/2211.09788 论文代码…...

CH01_重构、第一个示例
概述 在这一章节,作者给出了一个戏剧演出团售票的示例:剧目有悲剧(tragedy)和喜剧(comedy);为了卖出更多的票,剧团则更具观众的数量来为下次演出打折扣(大致意思是这次的…...
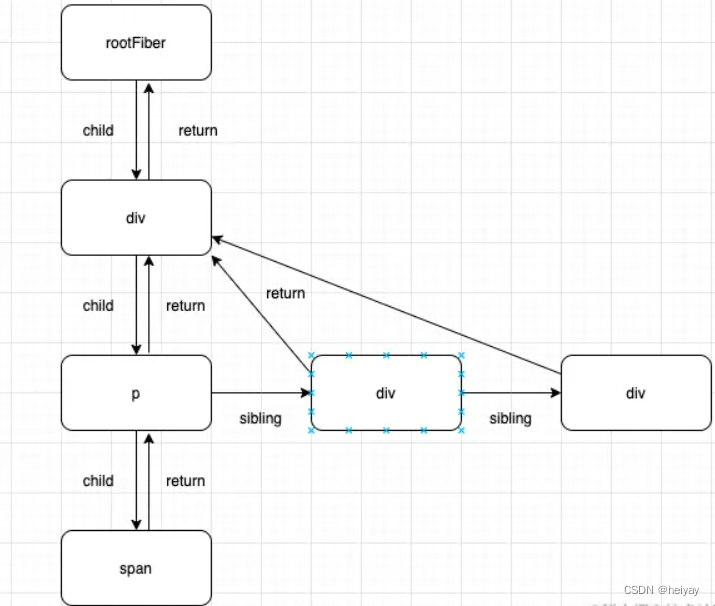
学习篇之React Fiber概念及原理
什么是React Fibber? React Fiber 是 React 框架的一种底层架构,为了改进 React 的渲染引擎,使其更加高效、灵活和可扩展。 传统上,React 使用一种称为堆栈调和递归算法来处理虚拟 DOM 的更新,这种方法在大型应用或者…...
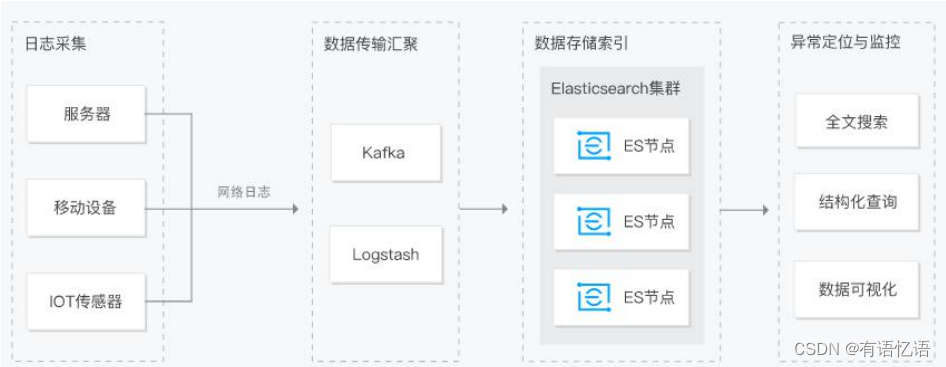
商城-学习整理-高级-全文检索-ES(九)
目录 一、ES简介1、网址2、基本概念1、Index(索引)2、Type(类型)3、Document(文档)4、倒排索引机制4.1 正向索引和倒排索引4.2 正向索引4.3 倒排索引 3、相关软件及下载地址3.1 Kibana简介3.2 logstash简介…...

无人机跟随一维高度避障场景--逻辑分析
无人机跟随一维高度避障场景--逻辑分析 1. 源由2. 视频3. 问题3.1 思维发散3.2 问题收敛 4. 图示4.1 水平模式4.2 下坡模式4.3 上坡模式4.4 碰撞分析 5. 总结5.1 一维高度避障场景5.2 业界跟随产品5.3 APM集成跟随 6. 参考资料7. 补充资料 - 大疆智能跟随7.1 炸机7.2 成功 1. 源…...
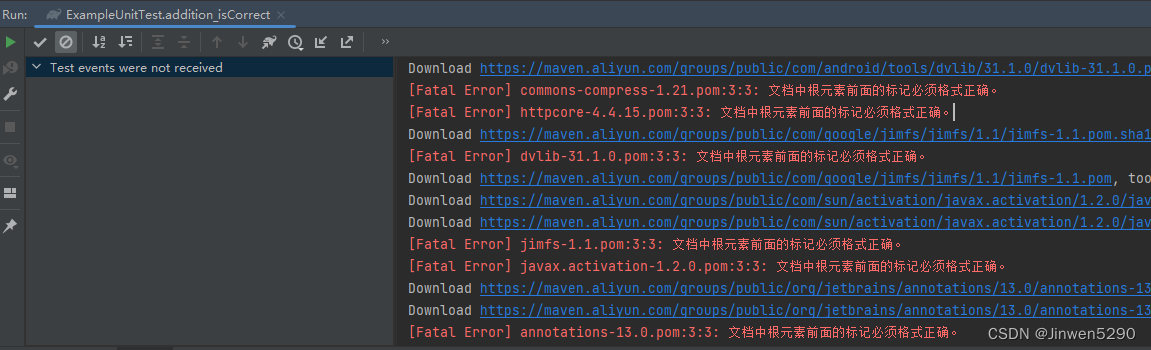
Android Studio Giraffe控制台乱码
这几天在使用Android Studio Giraffe进行一个App的开发,在项目构建的时候,控制台输出中文都是乱码,看着很不爽,进行了两项配置,中文就可以正常输出了,看起来就爽多了。 第一个配置:点击Help菜单…...

云原生 envoy xDS 动态配置 java控制平面开发 支持restful grpc实现 EDS 动态endpoint配置
envoy xDS 动态配置 java控制平面开发 支持restful grpc 动态endpoint配置 大纲 基础概念Envoy 动态配置API配置方式动静结合的配置方式纯动态配置方式实战 基础概念 Envoy 的强大功能之一是支持动态配置,当使用动态配置时,我们不需要重新启动 Envoy…...

3分钟上手Awoo Installer:Switch游戏安装终极指南
3分钟上手Awoo Installer:Switch游戏安装终极指南 【免费下载链接】Awoo-Installer A No-Bullshit NSP, NSZ, XCI, and XCZ Installer for Nintendo Switch 项目地址: https://gitcode.com/gh_mirrors/aw/Awoo-Installer 还在为Switch游戏安装烦恼吗…...

GPT-4V食物识别实测:准确率真能到87.5%?我们复现了那篇论文的实验
GPT-4V食物识别技术深度测评:从实验室数据到真实场景的挑战 当一张摆盘精致的牛排照片被上传到GPT-4V界面,三秒后系统不仅识别出"肋眼牛排",还精确标注出"约350克"和"780千卡"时,这种看似科幻的场景…...

RK3562核心板选型与开发实战:从硬件拆解到软件适配
1. 项目概述:为什么是PET_RK3562_CORE? 在嵌入式开发领域,尤其是智能硬件和物联网设备的设计中,核心板的选择往往是决定项目成败、成本控制和技术路线的关键一步。最近几年,基于ARM架构的国产化芯片方案异军突起&#…...

Windows电脑直接运行安卓应用:APK安装器完全指南
Windows电脑直接运行安卓应用:APK安装器完全指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾幻想过在Windows电脑上流畅运行安卓应用ÿ…...

3分钟拯救经典游戏:用DDrawCompat让Windows老游戏在现代系统上重生
3分钟拯救经典游戏:用DDrawCompat让Windows老游戏在现代系统上重生 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_mirro…...

Android Studio中文插件5分钟快速安装完整指南:告别英文开发困扰
Android Studio中文插件5分钟快速安装完整指南:告别英文开发困扰 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 还在…...

SQLI-labs 第十七关:POST二次注入与报错注入实战解析
1. 二次注入与报错注入的核心原理 二次注入就像是一个潜伏的特工,它不会在第一次接触时就暴露自己。想象这样一个场景:你在网站注册时输入了一个恶意用户名,系统当时没有表现出任何异常。但当你后续修改密码时,这个潜伏的恶意代码…...

从硬件连接到数据可视化:基于RS485-USB的传感器数据采集全流程解析
1. 硬件连接:从传感器到电脑的物理链路搭建 工业传感器数据采集的第一步,就是建立可靠的物理连接。以常见的星仪压力变送器为例,我们需要解决三个关键问题:传感器供电、信号传输转换、以及电脑端识别。这里我分享几个实际项目中容…...

3步解决Mac读写NTFS难题:免费开源工具完全指南
3步解决Mac读写NTFS难题:免费开源工具完全指南 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and management for NTFS …...

突破性效率工具:3步实现Draw.io Mermaid智能绘图完整方案
突破性效率工具:3步实现Draw.io Mermaid智能绘图完整方案 【免费下载链接】drawio_mermaid_plugin Mermaid plugin for drawio desktop 项目地址: https://gitcode.com/gh_mirrors/dr/drawio_mermaid_plugin 还在为传统拖拽式绘图效率低下而烦恼吗࿱…...