yolov5封装进ros系统
一,要具备ROS环境
ROS环境搭建可以参考我之前的文章
ROS参考文章1
ROS参考文章2
建立ROS工作空间
ROS系统由自己的编译空间规则。
cd 你自己想要的文件夹(我一般是home目录)
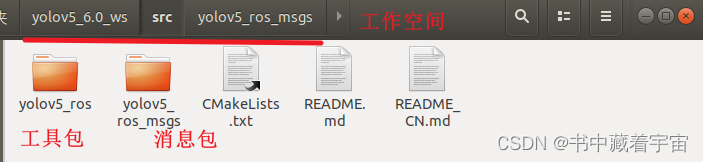
- mkdir -p (你自己的文件夹名字,比如我是yolov5_ws)/src(src不能更换名字)(举例:mkdir -p yolov5/src)
- 建立工具包,catkin create_pkg yolov5_ros roscpp rospy std_msgs message_generation message_runtime
- 在yolov5_ros 文件下建立如下几个文件夹:
- launch 文件夹(launch文件)
- media 文件夹(测试视频文件,可以不要)
- scripts文件夹(存放py的脚本文件)
- weights文件(存放yolov5的权重文件,自己可以设置,改完之后,在launch文件夹里面记得同步更改)
- yolov5文件夹(存放yolov5源码,版本不限制)
- 新建消息文件夹yolo5_ros_msgs ,limian 里面新建msg文件夹,存放我们的自定义消息包类型
- msg里面新建我们需要自定义的消息类型xxx.msg ,如下所示👇
float64 probability
int64 xmin
int64 ymin
int64 xmax
int64 ymax
int16 num
string Class
- msg里面新建我们需要自定义的消息类型xxx.msg ,如下所示👇
备注:自己定义的消息包类型,不要忘记了CMakelist.txt文件里面修改编译规则。👇
cmake_minimum_required(VERSION 3.0.2)
project(yolov5_ros_msgs)find_package(catkin REQUIRED COMPONENTSstd_msgsmessage_generationmessage_runtimerospystd_msgs
)add_message_files(DIRECTORY msgFILESBoundingBox.msgBoundingBoxes.msg
)generate_messages(DEPENDENCIESstd_msgs
)catkin_package(CATKIN_DEPENDS message_generation message_runtime rospy std_msgs)include_directories(
# include${catkin_INCLUDE_DIRS}
)
具体每一项的意义可以参考我如下博客,写的非常详细
编译依赖项意义的参考博客
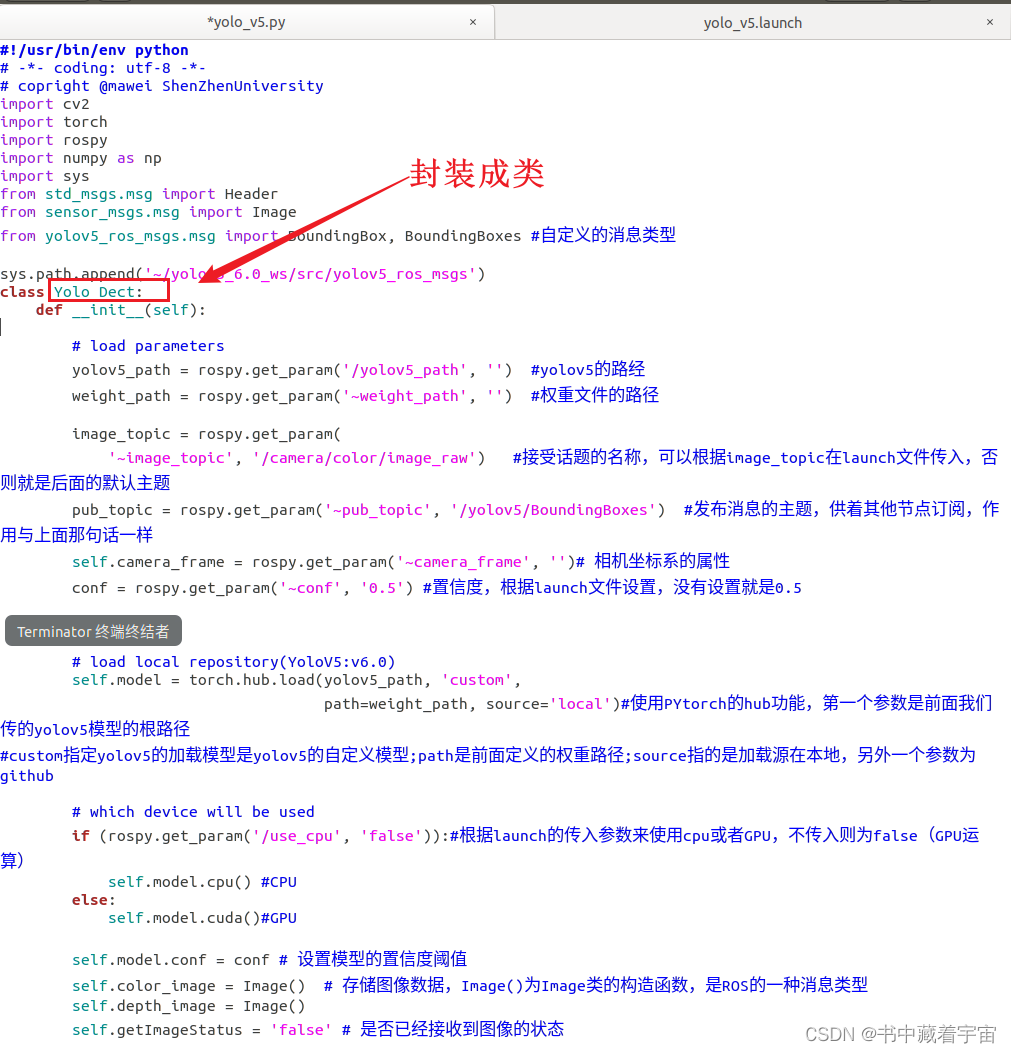
编写脚本封装yolo算法
这个根据自己的YOLO版本类型进行封装。我把该代码上传至我的个人github。
#启动脚本编写(根据个人节点情况编写)
<?xml version="1.0" encoding="utf-8"?><launch><!-- Load Parameter --><param name="yolov5_path" value="$(find yolov5_ros)/yolov5"/><param name="use_cpu" value="True" /><!-- Start yolov5 and ros wrapper --><node pkg="yolov5_ros" type="yolo_v5.py" name="yolov5_ros" output="screen" ><param name="weight_path" value="$(find yolov5_ros)/weights/yolov5s.pt"/><param name="image_topic" value="/usb_cam/image_raw" /><param name="pub_topic" value="/yolov5/BoundingBoxes" /><param name="camera_frame" value="camera_color_frame"/><param name="conf" value="0.3" /></node></launch>
编译和添加环境变量
这个地方搞过ROS的都知道,不做详细说明。
编译完毕之后,运行脚本
roslaunch yolov5_ros 脚本名称运行结果
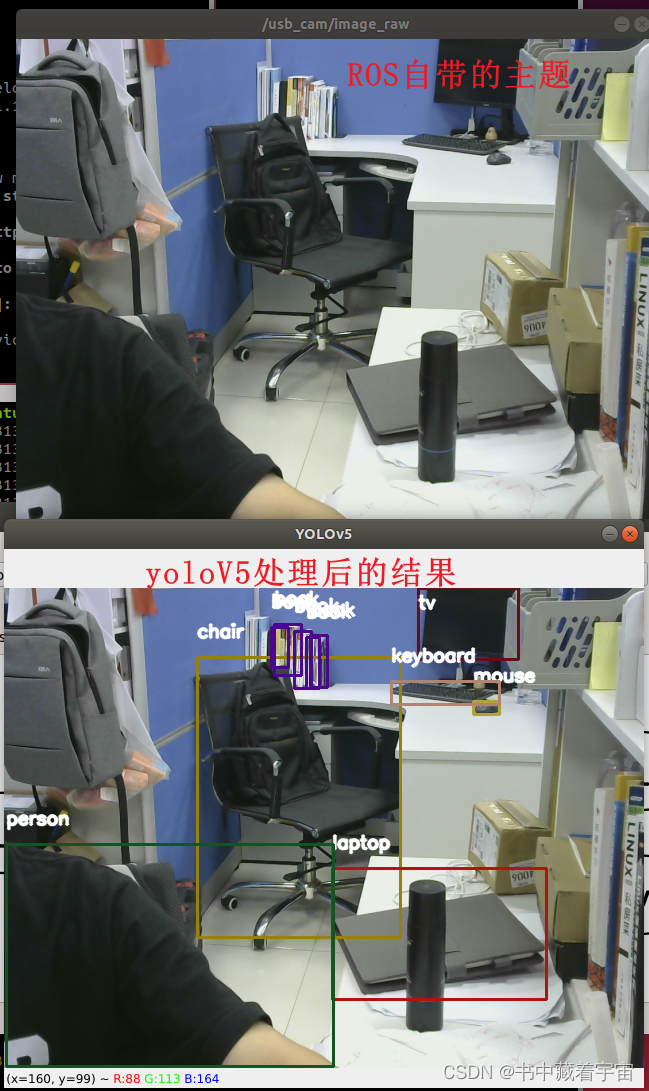
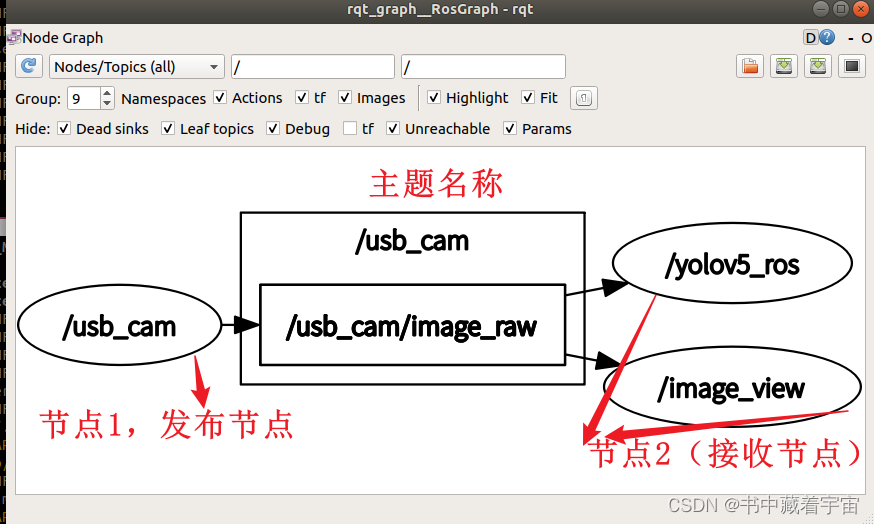
运行的主题名称👇
riz显示👇
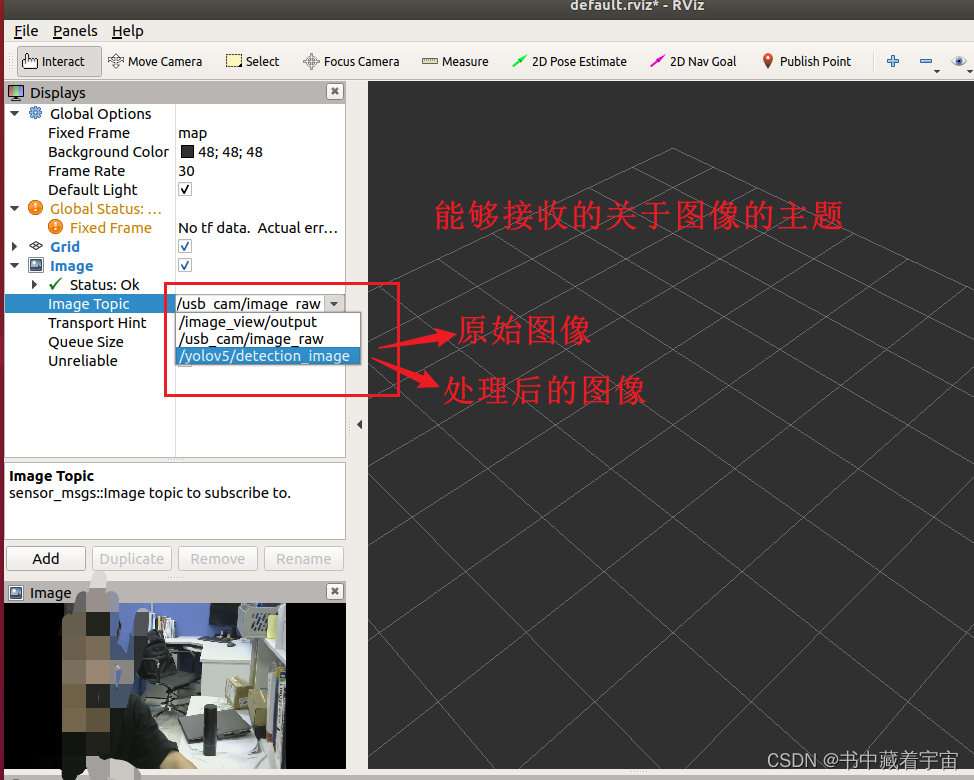
运行结果👇

相关文章:
yolov5封装进ros系统
一,要具备ROS环境 ROS环境搭建可以参考我之前的文章 ROS参考文章1 ROS参考文章2 建立ROS工作空间 ROS系统由自己的编译空间规则。 cd 你自己想要的文件夹(我一般是home目录) mkdir -p (你自己的文件夹名字,比如我是yolov5…...

Flowable 源码目录结构
title: Flowable 源码目录结构 date: 2023-8-17 23:47:20 tags: - Flowable 下载源码 下载地址:flowable/flowable-engine at flowable-6.7.2 (github.com) Git 下载方式:git clone gitgithub.com:flowable/flowable-engine.git 切换分支 git checkout -…...
科大讯飞星火模型申请与chatgpt 3.5模型以及new bing的对比
科大讯飞星火模型 申请科大讯飞星火认知大模型账号科大讯飞星火认知大模型使用1.界面介绍2. 在编程能力上与chatgpt 3.5对比科大讯飞星火模型chatgpt 3.5模型 3. 在图片生成能力上与new bing对比 总结 申请科大讯飞星火认知大模型账号 注册网址: 科大讯飞星火认知大…...

无涯教程-TensorFlow - 分布式计算
本章将重点介绍如何开始使用分布式TensorFlow,目的是帮助开发人员了解重复出现的基本分布式TF概念,如TF服务器。无涯教程将使用Jupyter Notebook分布式TensorFlow。 第1步 - 导入分布式计算必需的必要模块- import tensorflow as tf 第2步 - …...

python+django+mysql项目实践五(信息搜索)
python项目实践 环境说明: Pycharm 开发环境 Django 前端 MySQL 数据库 Navicat 数据库管理 信息搜素 输入内容进行搜索,内容有文本类和时间类 文本类需要模糊搜索,包含即检索 时间类需要选取时间范围内的内容 views 利用Q完成对指定内容的检索 检索后按检索内容更新…...
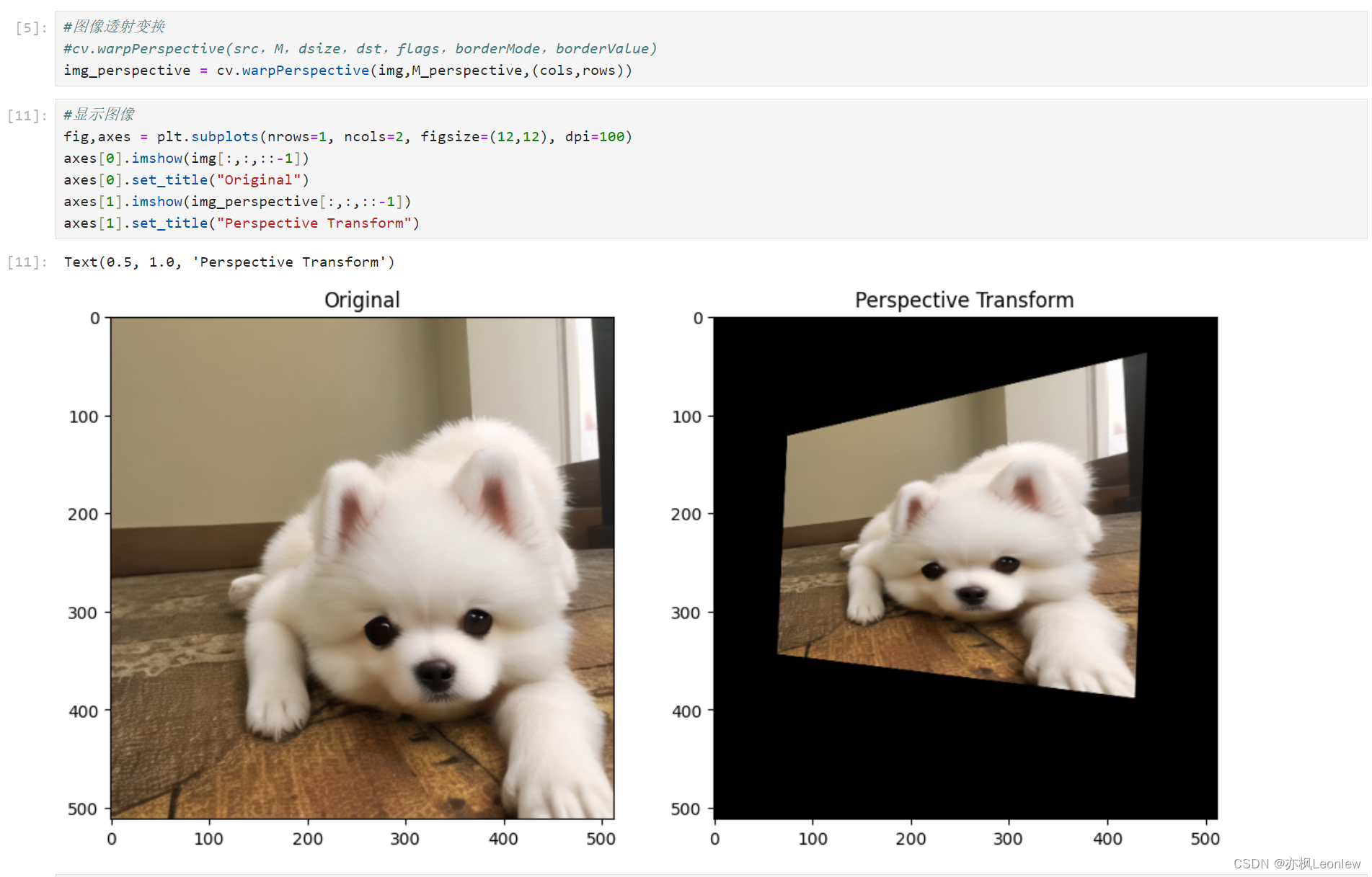
Python Opencv实践 - 图像透射变换
import cv2 as cv import numpy as np import matplotlib.pyplot as pltimg cv.imread("../SampleImages/pomeranian.png", cv.IMREAD_COLOR) rows,cols img.shape[:2] print(rows,cols)#opencv中的透射变换,需要一个3x3透射变换矩阵 #这个矩阵可以通过…...

SpringBoot + Vue 微人事项目(第二天)
昨天做了微人事登录的前端页面和后端接口,实现了前后端接口的对接,输入正确的用户名和密码之后,成功的跳转到home页。现在要做的就是Home页的Title制作 Home页的title制作 使用Element UI中的Container布局容器 复制的代码如下,…...

【AIGC】 快速体验Stable Diffusion
快速体验Stable Diffusion 引言一、安装二、简单使用2.1 一句话文生图2.2 详细文生图 三、进阶使用 引言 stable Diffusion是一款高性能的AI绘画生成工具,相比之前的AI绘画工具,它生成的图像质量更高、运行速度更快,是AI图像生成领域的里程碑…...
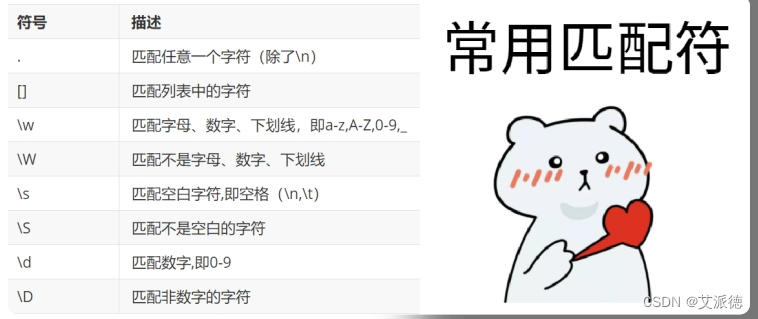
Python入门【动态添加属性和方法、正则表达式概述、match函数的使用、常用匹配符、限定符 、限定符使用示例】(二十九)
👏作者简介:大家好,我是爱敲代码的小王,CSDN博客博主,Python小白 📕系列专栏:python入门到实战、Python爬虫开发、Python办公自动化、Python数据分析、Python前后端开发 📧如果文章知识点有错误…...

《Go 语言第一课》课程学习笔记(四)
构建模式:Go Module 的 6 类常规操作 为当前 module 添加一个依赖 我们如何为一个 Go Module 添加一个新的依赖包呢? 如果我们要为项目增加一个新依赖:github.com/google/uuid,我们首先会更新源码:package mainimpor…...

制定建立商务模式财务及企业管理信息系统的解决方案
1、调查企业对 Internet 的需求,并制定全面规划。由于电子商务的范围相当 广泛,企业在实施电子商务模式财务及企业管理信息系统时,应先调查哪些对于企 业的收益较大,然后进行全面规划,即规划信息化基本平台、后台企业…...
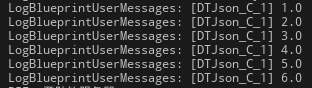
UE Json Operate 解析嵌套数组
演示如何使用 DTJsonOperate 插件,在蓝图中解析嵌套数组。 比如这个Json {"name": [[[1, 2]],[3, 4],[5, 6]] } 操作演示 最后打印 本功能需要插件支持,插件下载地址。...
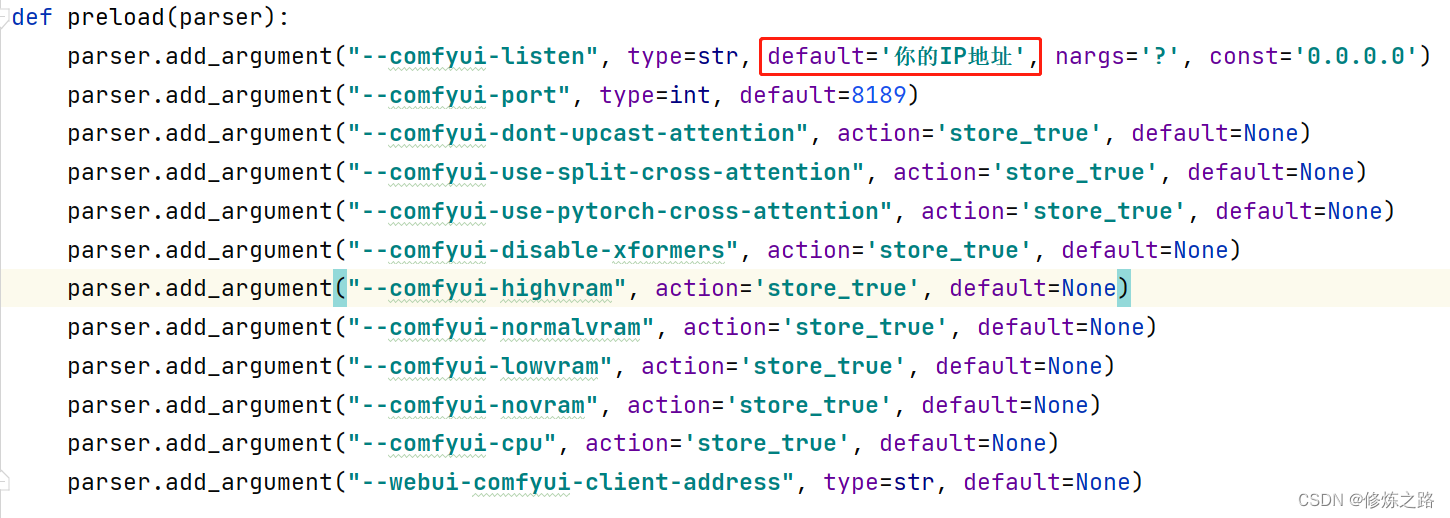
sd-webui安装comfyui扩展
文章目录 导读ComfyUI 环境安装1. 安装相关组件2. 启动sd-webui3. 访问sd-webui 错误信息以及解决办法 导读 这篇文章主要给大家介绍如何在sd-webui中来安装ComfyUI插件 ComfyUI ComfyUI是一个基于节点流程式的stable diffusion的绘图工具,它集成了stable diffus…...
Apache Doris 2.0.0 版本正式发布:盲测性能 10 倍提升,更统一多样的极速分析体验
亲爱的社区小伙伴们,我们很高兴地向大家宣布,Apache Doris 2.0.0 版本已于 2023 年 8 月 11 日正式发布,有超过 275 位贡献者为 Apache Doris 提交了超过 4100 个优化与修复。 在 2.0.0 版本中,Apache Doris 在标准 Benchmark 数…...
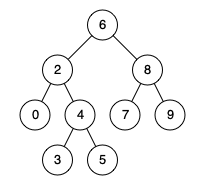
LeetCode235. 二叉搜索树的最近公共祖先
235. 二叉搜索树的最近公共祖先 文章目录 [235. 二叉搜索树的最近公共祖先](https://leetcode.cn/problems/lowest-common-ancestor-of-a-binary-search-tree/)一、题目二、题解方法一:递归方法二:迭代 一、题目 给定一个二叉搜索树, 找到该树中两个指定…...
设计模式——建造者(Builder)模式
建造者模式(Builder Pattern),又叫生成器模式,是一种对象构建模式 它可以将复杂对象的建造过程抽象出来,使这个抽象过程的不同实现方法可以构造出不同表现的对象。建造者模式是一步一步创建一个复杂的对象,…...

Java课题笔记~ SpringBoot概述
问题导入 学习了SpringBoot入门案例之后,感觉对比SpringMVC哪一个更加方便简洁? SpringBoot是由Pivotal团队提供的全新框架,其设计目的是用来简化Spring应用的初始搭建以及开发过程 Spring程序缺点 配置繁琐 依赖设置繁琐 SpringBoot程序…...
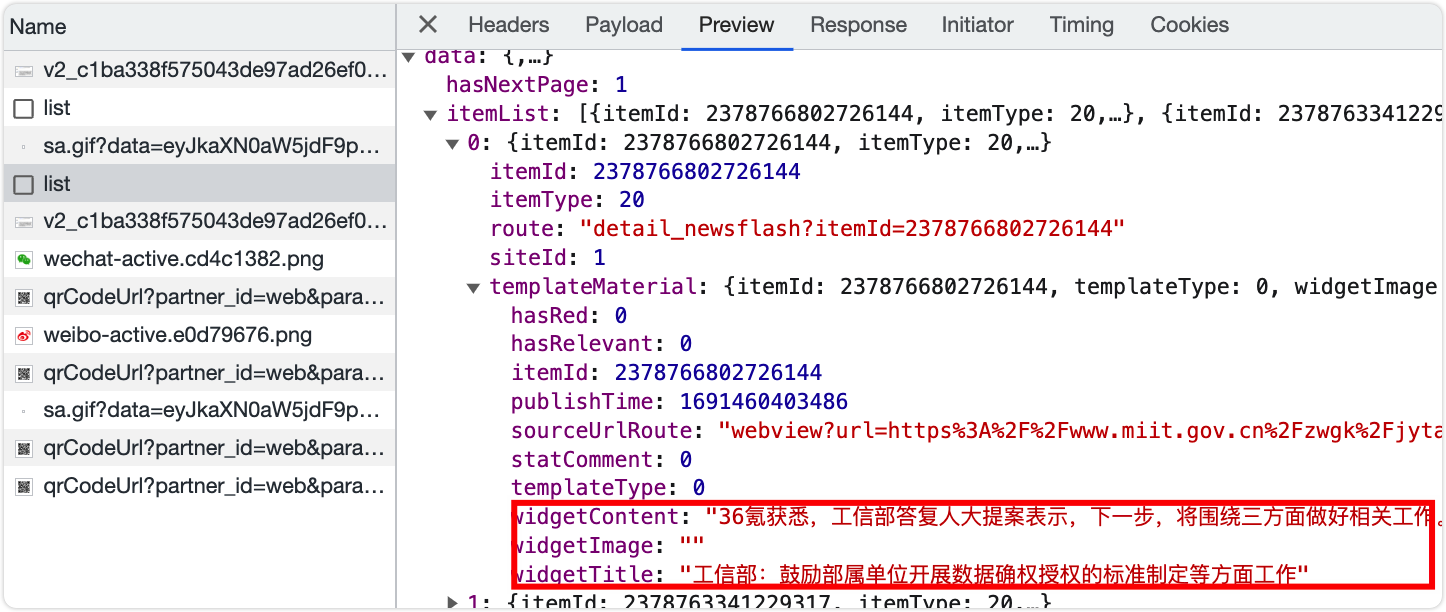
python优雅地爬虫!
背景 我需要获得新闻,然后tts,在每天上班的路上可以听一下。具体的方案后期我也会做一次分享。先看我喜欢的万能的老路:获得html内容-> python的工具库解析,获得元素中的内容,完成。 好家伙,我知道我爬…...

UVM RAL后门访问配置
先给一下大致的代码结构,根据代码结构来描述。 //dut结构 module my_dut(...);my_reg U_REG(......);endmodulemodule my_reg(...);//reg1和reg2是一个reg的两个field,reg3单独是一个regreg [15:0] reg1_q;reg [15:0] reg2_q;reg [31:0] reg3_q;endmodu…...

数学建模之“灰色预测”模型
灰色系统分析法在建模中的应用 1、CUMCM2003A SARS的传播问题 2、CUMCM2005A长江水质的评价和预测CUMCM2006A出版社的资源配置 3、CUMCM2006B艾滋病疗法的评价及疗效的预测问题 4、CUMCM2007A 中国人口增长预测 灰色系统的应用范畴大致分为以下几方面: (1)灰色关…...

Altium Designer实战:用xSignals搞定DDR4内存的等长布线,告别时序烦恼
Altium Designer实战:用xSignals实现DDR4内存精准等长布线 在高速PCB设计中,DDR4内存接口的布线一直是硬件工程师面临的技术高地。当信号速率突破2400MHz时,地址、命令与数据线之间哪怕几个ps的时序偏差都可能导致系统不稳定。传统手工计算网…...

模拟IC设计避坑指南:用Cadence Virtuoso仿真,揭秘电流镜精度下降的3个元凶
模拟IC设计避坑指南:用Cadence Virtuoso仿真,揭秘电流镜精度下降的3个元凶 在模拟CMOS集成电路设计中,电流镜作为基础模块广泛应用于偏置电路、有源负载等场景。然而许多工程师在Cadence Virtuoso IC617中完成电流镜设计后,常会遇…...

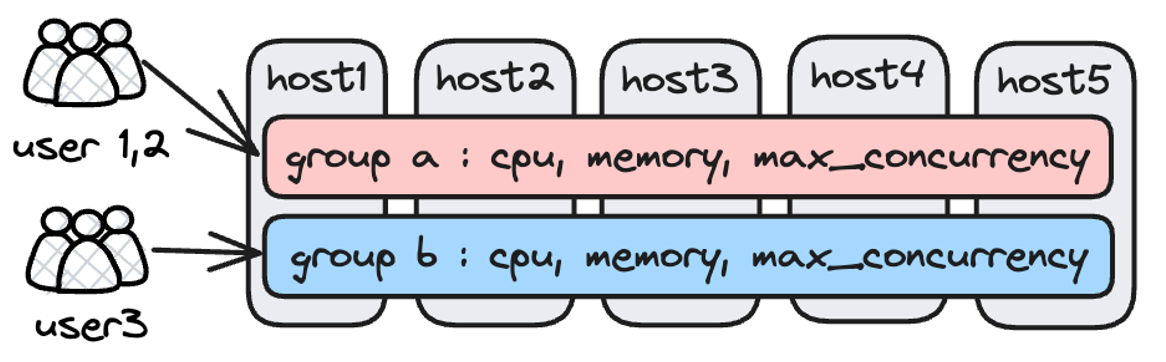
SmarterRouter:基于软件定义与模块化构建智能路由器系统
1. 项目概述:一个更聪明的路由器,它到底想做什么?如果你和我一样,折腾过家里的网络,从刷第三方固件到组软路由,那你肯定对“路由器”这三个字有复杂的感情。它本该是默默无闻的网络基石,却常常因…...

如何3步免费解锁WeMod专业版:2026年终极增强工具使用指南
如何3步免费解锁WeMod专业版:2026年终极增强工具使用指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的订阅费用而犹豫…...
研究(Matlab代码实现))
一种用于并网光伏系统的创新型多层逆变器,以降低总谐波失真(THD)研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 🎁…...

使用mcp-maker快速构建AI工具调用服务器:从协议原理到工程实践
1. 项目概述与核心价值最近在折腾AI应用开发,特别是想给大语言模型(LLM)装上更强大的“手脚”,让它能直接操作我电脑上的各种软件和工具。这听起来很酷,对吧?但实际操作起来,你会发现一个核心痛…...

AI模型部署实战:基于FastAPI与Tauri构建OpenClaw模型GUI应用
1. 项目概述与核心价值最近在AI应用开发圈里,一个名为“GrahamMiranda-AI/openclaw-model-gui”的项目引起了我的注意。乍一看这个标题,它融合了“openclaw-model”和“gui”两个关键部分,这让我立刻联想到一个典型的场景:一个已经…...

016、Git版本控制与协作开发流程
016 Git版本控制与协作开发流程 一个让我熬夜到凌晨三点的.gitignore 去年做一款基于STM32U5的TinyML手势识别项目,团队四个人,代码库从第一天就开始膨胀。第三天晚上,我习惯性git push,然后去睡觉。凌晨三点被手机震醒——同事在群里@我:“你push了个啥?编译不过了。”…...

AI绘图技能解析:用自然语言驱动Excalidraw自动生成图表
1. 项目概述:一个为Excalidraw注入AI灵魂的绘图技能如果你经常用Excalidraw画流程图、架构图或者白板草图,那你一定体会过那种“想法很丰满,画笔很骨感”的尴尬。脑子里明明有一个清晰的系统架构,但落到画布上,光是调整…...

像素风格技能图标自动生成:Python+Pillow实现模板化设计
1. 项目概述与核心价值最近在和一些做独立开发者和内容创作者的朋友聊天时,发现一个普遍痛点:大家手头都有不少好想法,但一到具体执行,尤其是需要制作宣传素材时,就卡住了。比如,想给自己的新App做个宣传图…...