STM32--TIM定时器(3)
文章目录
- 输入捕获简介
- 频率测量
- 输入捕获通道
- 输入捕获基本结构
- PWMI的基本结构
- 输入捕获模式测量PWM频率和占空比
- 代码
- 编码器接口
- 正交编码器
- 工作模式
- 接口基本结构
- TIM编码接口器测速
- 代码:
输入捕获简介
输入捕获IC(Input Capture),是处理器捕获外部输入信号的功能。基于定时器抓取输入信号指定触发方式之间的长度。通过输入捕获功能,我们可以测量脉冲宽度和测量频率。
在每个高级定时器和通用器都有4个输入捕获通道。
当通道输入引脚出现指定电平跳变时,当前CNT的值将被锁存到CCR中,可用于测量PWM波形的频率、占空比、脉冲间隔、电平持续时间等参数。
输入捕获功能主要涉及以下几个关键概念:
捕获通道(Capture Channel):定时器可以配置多个捕获通道,每个通道用于捕获一个外部事件的触发时间和脉冲宽度。
计数器(Counter):定时器的计数器用于记录定时器的计数值,表示经过的时间。
捕获寄存器(Capture Register):捕获寄存器用于存储捕获通道捕获到的时间戳或者脉冲宽度值。
触发源(Trigger Source):触发源可以是定时器的输入引脚(如外部信号源),或者是定时器自身的输出(如另一个定时器的通道输出)。
中断(Interrupt):当捕获事件发生时,定时器会触发相应的中断,可以在中断服务程序中处理捕获结果。
频率测量
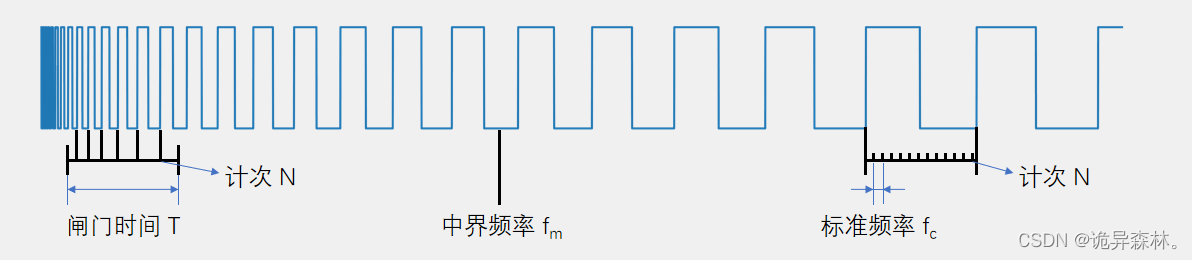
测频法:在闸门时间T内,对上升沿计次,得到N,则频率f_x=N / T.
这种方法要求测量的频率比较快,计算频率的N越多,计算的越精确,也就表明频率越快;
测周法:两个上升沿内,以标准频率fc计次,得到N ,则频率f_x=f_c / N.
这种方法要求所测频率比较低,要求标准频率要远大于所测频率,这样N会算的越多,所测频率越准确。
中界频率:测频法与测周法误差相等的频率点f_m=√f_c / T
这种方法主要用来判断所测频率用哪种方法比较合适,根据所给的标准频率和时间T去验证。
输入捕获通道
先看总框图
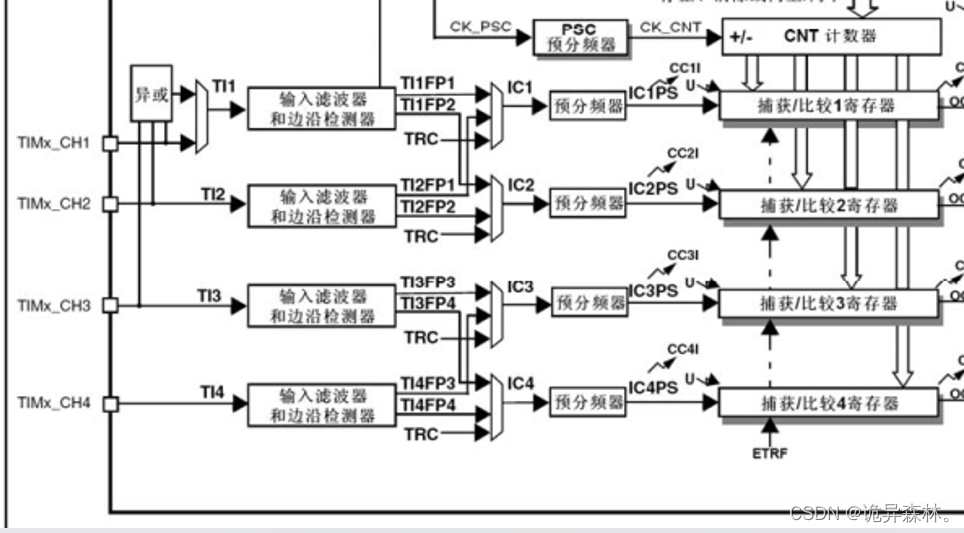
最左边的是输入捕获的通道引脚,有4个,可以参考引脚定义表来确认通道;
进来之后有一个三输入的异或门,执行逻辑是当三个引脚有任何一个引脚有电平翻转的时候,输出引脚就发生电平翻转,之后输出通过数据选择器,到达输入捕获通道1,异或这里有两个选择,如果是上面那个,那输入捕获通道1就是三个引脚的异或值,如果选择下面一个,那么异或门就没有用,直接四个通道各用各的引脚。这个异或门主要用于三相无刷电机。
接着进入输入滤波器和边沿检测器,滤波器可以对输入信号进行滤波,避免毛刺和干扰信号;边沿检测器可以选择上升沿触发或者下降沿触发,触发后执行后续电路;并且这里是设计了两套滤波检测电路,第一套电路经过滤波和极性选择,得到TI1FP1,进入后续电路;第二套电路同样的操作,得到TI2FP2,进入后续电路;输入通道2也是同样的道理。对于TI1FP1会进入通道1的后续电路,TI2FP2会进入通道2的后续电路。这样做就能让一个引脚的输入映射到两个捕获单元了。下面还有一个TRC输入,也是用于无刷电机的驱动。
走到预分频器,每个通道都各有一个,可以对输入的频率进行分频,分频后的信号就能够触发捕获电路开始工作。每来一个值,CNT中的值就会转到捕获寄存器进行锁存。可以根据这个值进行时间,频率的计算。同时也会产生捕获事件(CC1I),还会产生标志位(U)到寄存器上,可以产生中断。
再看捕获通道:
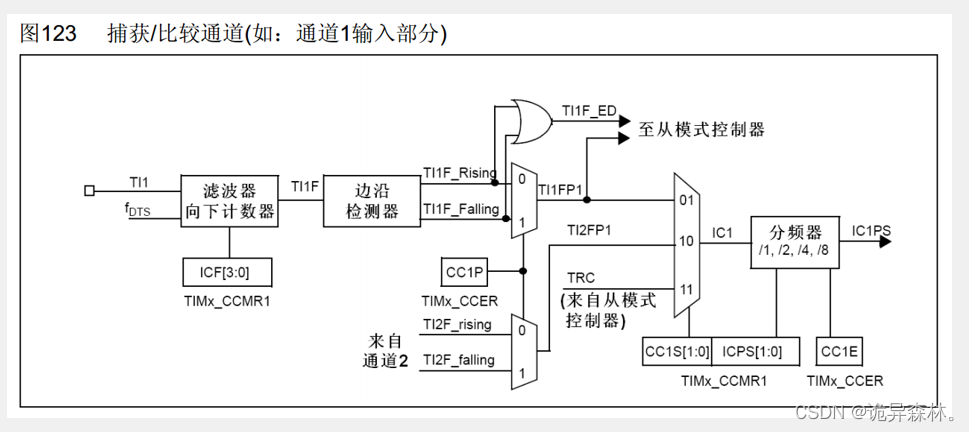
通过输入引脚引入滤波器,TI1就是输入的引脚,输出的TI1F就是滤波后的信号,fDTS是滤波器的采样时钟来源,下面是CCMR1是控制滤波器参数的寄存器;
滤波后的信号进入边沿检测器,捕获上升沿或者下降沿,用下面的CCER寄存器就能选择极性。
得到的TI1FP1通过数据选择器,进入通道1的后续电路。
CC1S可以对数据选择器进行选择,IPPS可以对分频器进行配置,CCIE控制输出的使能。
这个TI1FP1信号触发进入通道1后续电路时,也可以同时触发从模式,从模式中有模式可以对CNT进行自动清0。
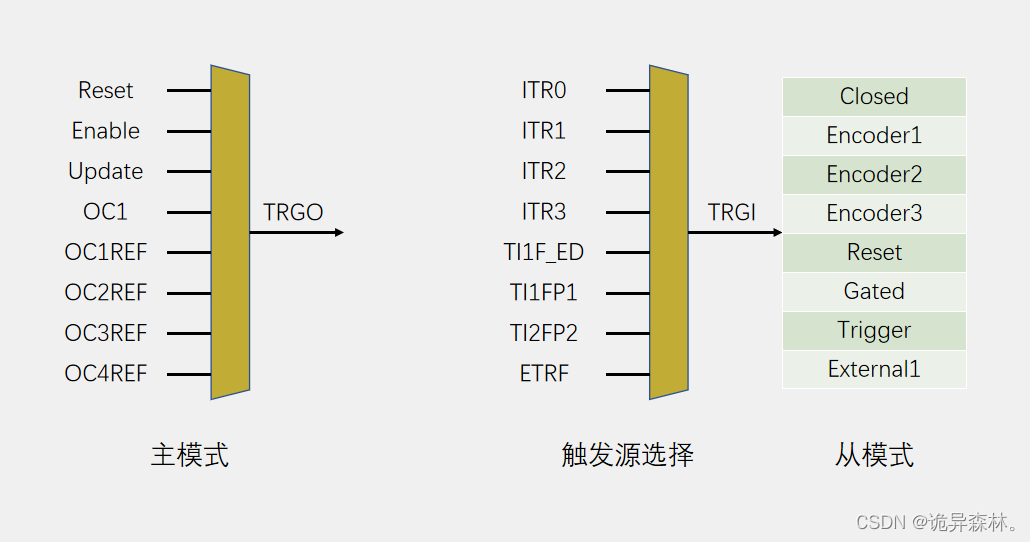
主模式将定时器的内部信号映射到TRGO引脚,用于触发别的外设;
从模式就是接收其他外设或者自身外设的信号,用于控制自身定时器的运行。
触发源可以选择一个信号到TRGI引脚上;
像我们刚才的选择,就是触发源选择TI1FP1,从模式的Reset;这样就完成对CNT自动清零的设置。
输入捕获基本结构

这里我们将采用上面的测周法进行测量;
举个例子,我们事先给时间单元的预分频器给72(接上内部时钟72MHz),那么频率就为1000000Hz。GPIO口输入一个频率为100Hz的PWM,通过滤波器和边缘检测极性选择,TI1FP1信号会触发后续通道电路并且触发从模式,以100Hz的一个周期来算,也就是在两个上升沿(100Hz)期间,1000000Hz的可以计算10000次(1000000/100),那么捕获寄存器就会得到10000的值,接着从模式会对CNT清零。这样得到的捕获值就可以对输入的频率进行计算。
当然,我们无法保证最后100Hz最后的周期是完整的,所以会有所误差(±1)。
PWMI的基本结构
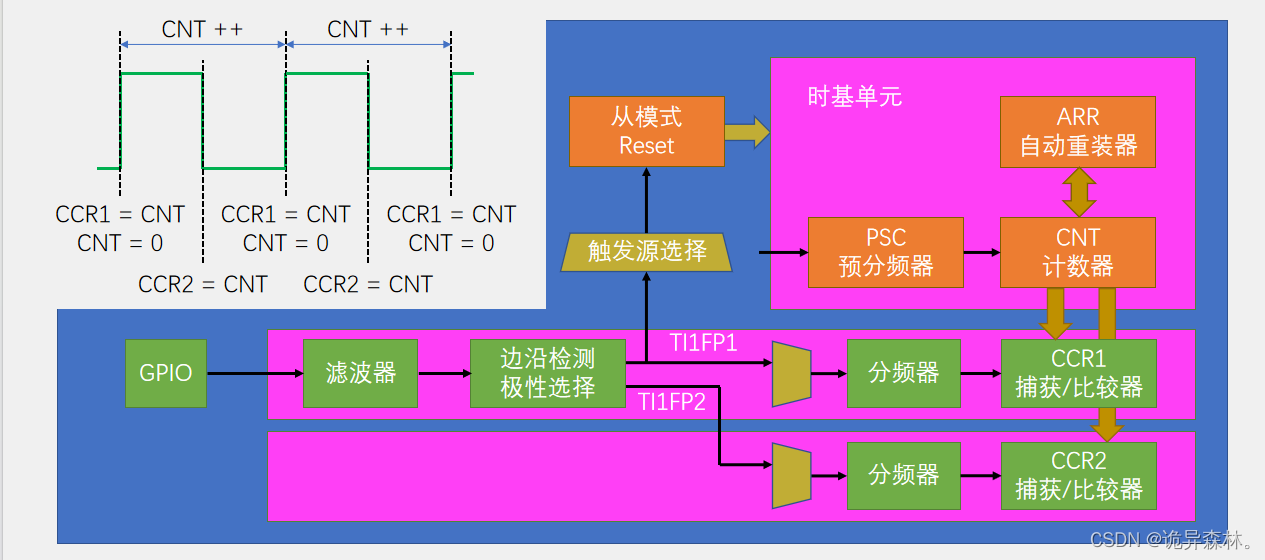
相比于上面的基本结构,这里多了一条捕获通道,这个TI2FP2触发的极性与TI1FP1相反,我们利用这个TI2FP2可以计算PWM的占空比。
例如TI1FP1触发极性为上升沿,TI2FP2触发极性为下降沿,我们还是以上面的例子展开延申,一个100Hz的周期内可以计算到10000次的标准频率周期,假设占空比为50%,那么在100Hz周期内,以标准频率去算的话,将会有5000次,那么这样把5000除以10000就可以得到占空比了。
输入捕获模式测量PWM频率和占空比
接线模式:
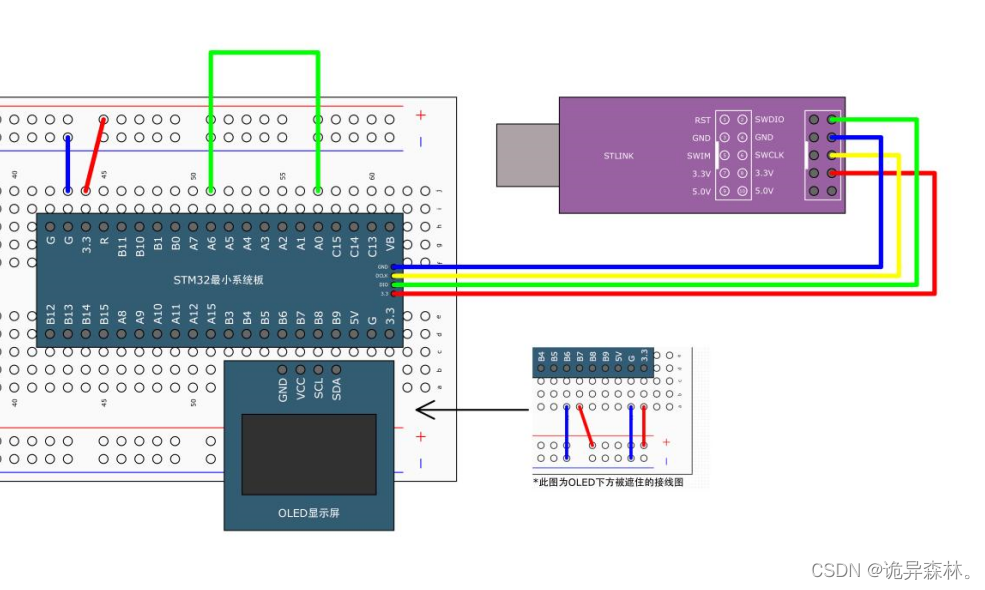
我们将在A0口输出一个PWM,由A6进行对A0口的PWM频率和占空比的测量。
代码
OLED所取路径
PWM.h
#ifndef __PWM_H__
#define __PWM_H__void PWM_Init();
void PWM_SetCompare(uint16_t Compare);
void PWM_Prescaler(uint16_t Prescaler);#endifPWM.c
#include "stm32f10x.h" // Device headervoid PWM_Init()
{//开启APB1外设开关RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//配置内部时钟TIM2TIM_InternalClockConfig(TIM2);//时钟结构体初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //划分TIM2TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //计时器模式TIM_TimeBaseInitStructure.TIM_Period=100-1; //自动加载寄存器周期值TIM_TimeBaseInitStructure.TIM_Prescaler=720-1; //预分频值TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0; //指定重复计时器的值,这里不用到TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//配置输出比较结构体TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; //配置输出比较模式TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //指定输出极性TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//输出比较状态TIM_OCInitStructure.TIM_Pulse=0; //指定要捕获的脉冲值CCRTIM_OC1Init(TIM2,&TIM_OCInitStructure);//启用TIM2外设控制TIM_Cmd(TIM2,ENABLE);}
//可以设置占空比
void PWM_SetCompare(uint16_t Compare)
{//配置TIM2比较值TIM_SetCompare1(TIM2,Compare);
}
//配置TIMx的预调度器,可以设置PWM频率
void PWM_Prescaler(uint16_t Prescaler)
{TIM_PrescalerConfig(TIM2,Prescaler,TIM_PSCReloadMode_Immediate);
}IC.h
#ifndef __IC_H__
#define __IC_H__void IC_Init();
uint32_t IC_GetFreq();
uint16_t IC_GetDuty();#endifIC.c
#include "stm32f10x.h" // Device header
#include "PWM.h"void IC_Init()
{//开启外设时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//引脚输出初始化GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);//Time内部时钟TIM_InternalClockConfig(TIM3);//内部时钟初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);//输入捕获初始化TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel=TIM_Channel_1; //选择通道TIM_ICInitStructure.TIM_ICFilter=0xF; //指定输入捕获过滤器TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising; //触发方式TIM_ICInitStructure.TIM_ICPrescaler=TIM_ICPSC_DIV1; //不分频TIM_ICInitStructure.TIM_ICSelection=TIM_ICSelection_DirectTI; //直流方式//配置TIM3外设测量通道2,输出初始化通道相反,流相反,触发方式相反的成员TIM_PWMIConfig(TIM3,&TIM_ICInitStructure);//选择输入触发源TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);//选择从模式TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);TIM_Cmd(TIM3,ENABLE);
}//获取输入捕获PWM频率
uint32_t IC_GetFreq()
{//72M/72=1Mreturn 1000000/(TIM_GetCapture1(TIM3)+1);//根据计算验证,捕获值为9999,有1的误差
}
//获取输入捕获PWM占空比
uint16_t IC_GetDuty()
{return ((TIM_GetCapture2(TIM3))*100/TIM_GetCapture1(TIM3)+1);
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
#include "IC.h"int main()
{OLED_Init();PWM_Init();IC_Init();OLED_ShowString(1,1,"Freq:00000Hz");OLED_ShowString(2, 1, "Duty:00%");PWM_Prescaler(7200-1); //Freq=72M/(PSC+1)/100PWM_SetCompare(75); //Duty=CCR/100;不能超过100while(1){OLED_ShowNum(1,6,IC_GetFreq(),5);OLED_ShowNum(2,6,IC_GetDuty(),2);}
}编码器接口
编码器接口常应用于测量、控制和位置检测等领域的传感器,用于监测旋转和线性运动的位置和速度。
每个高级定时器和通用定时器都拥有1个编码器接口。
两个输入引脚借用了输入捕获的通道1和通道2。
编码器接口模式基本上相当于使用了一个带有方向选择的外部时钟。
正交编码器
正交编码器通常由两个光电传感器组成,分别成为A相和B相。这两个相位差90°的信号输出,可以通过检测两个相位信号的变化来确认旋转方向和计数值。

在正交编码器中,两个相位信号的波形是基于格雷码(Gray Code)的。格雷码是一种二进制编码,相邻的数值只有一个位数发生变化。这样设计的好处是,在旋转过程中,即使出现脉冲跳变也不会导致计数错误。
通过对A相和B相信号进行解码,可以获取准确的旋转位置和方向。例如,当顺时针旋转时,A相先变化然后B相变化,而逆时针旋转时,B相先变化然后A相变化。
工作模式
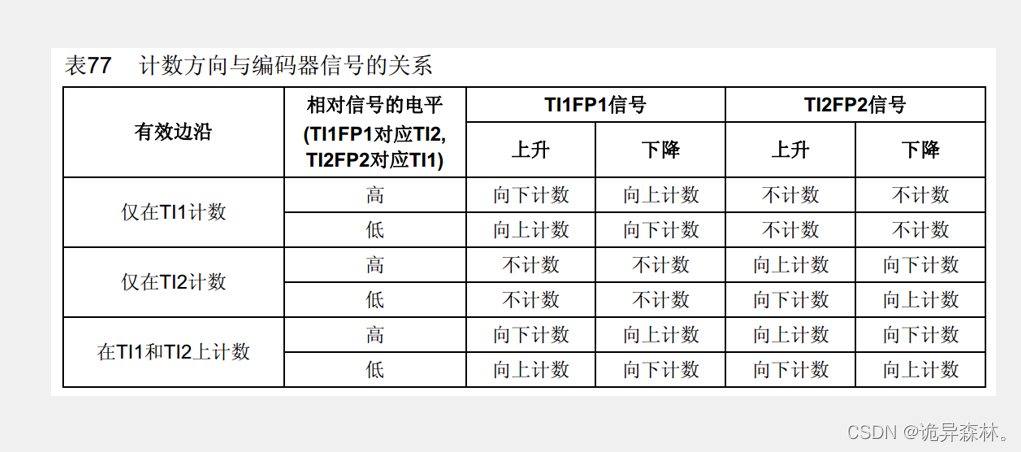
我们主要用TI1和TI2上的计数模式。
举个例子,在TI1低电平时,TI2上升沿,那么计数减少;TI2下降沿,计数增加。在TI1高电平时,TI2上升沿,那么计数增加;TI2下降沿,计数减少;
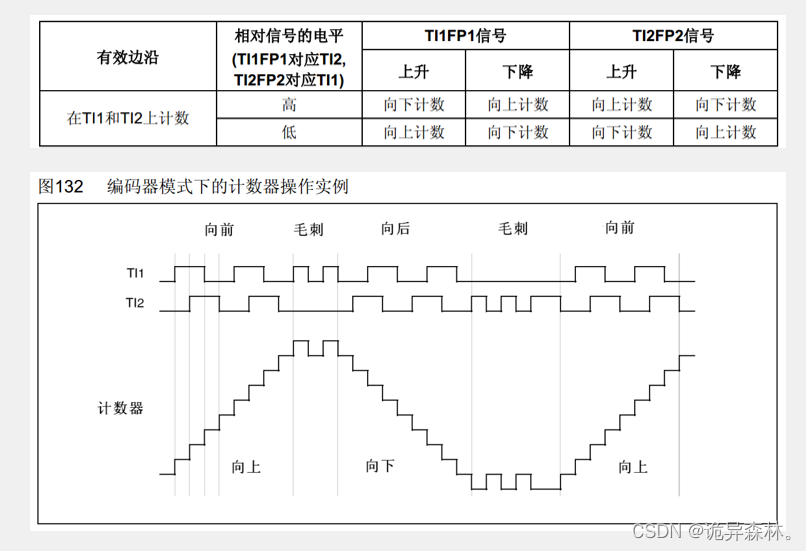
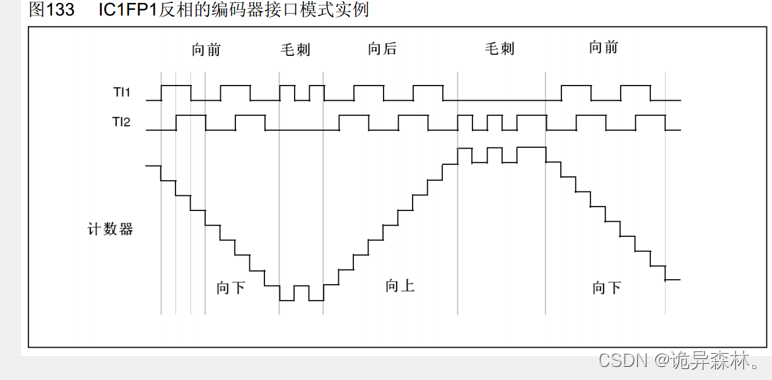
这是极性不反向的情况,也就是TI1和TI2的触发极性相同时,
若是相反:
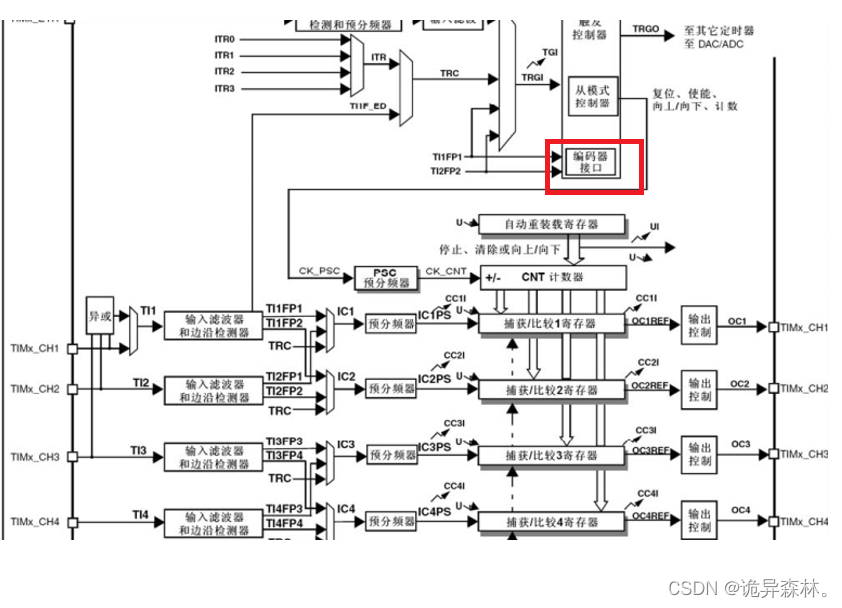
接口基本结构
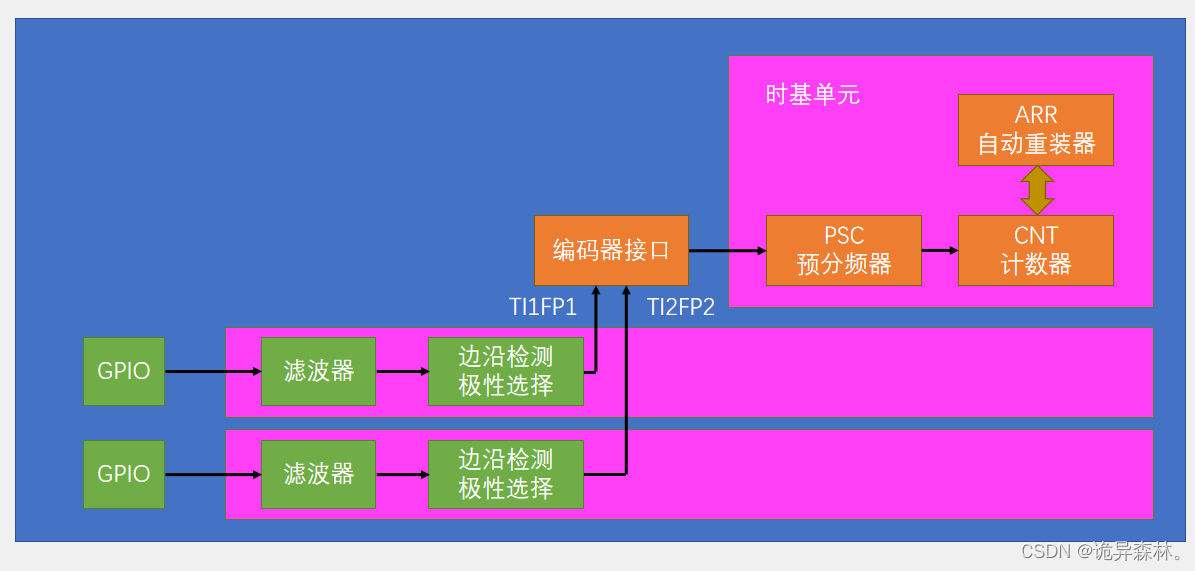
这里的编码器接口充当外部时钟,通过捕获输入的频率作为时钟源。
TIM编码接口器测速
接线方式:
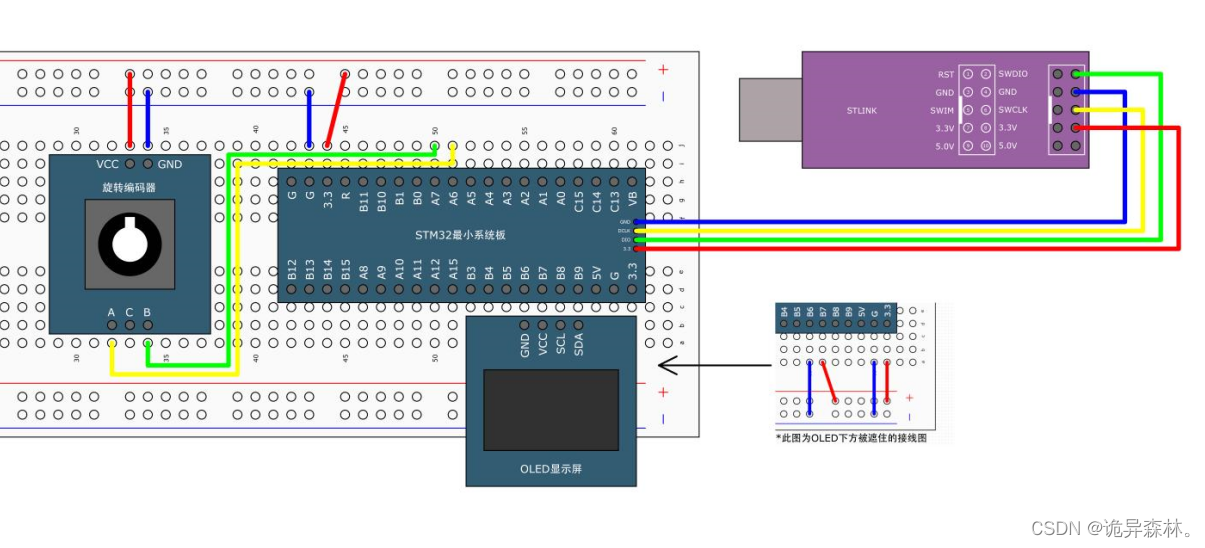
通过编码器的旋转速度,让它显示在屏幕上。
代码:
Timer.h
#ifndef __TIMER_H__
#define __TIMER_H__void Timer_Init();#endifTimer.c
#include "stm32f10x.h" // Device headervoid Timer_Init()
{//开启APB1外设开关RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//配置TIM2为内部时钟TIM_InternalClockConfig(TIM2);//时钟结构体初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //划分TIM2TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //计时器模式TIM_TimeBaseInitStructure.TIM_Period=10000-1; //自动加载寄存器周期值TIM_TimeBaseInitStructure.TIM_Prescaler=7200-1; //预分频值TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0; //指定重复计时器的值,这里不用到TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//TIM_ClearFlag(TIM2, TIM_FLAG_Update);//启用TIM2中断TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//配置优先级分组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//NVIC初始化NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;NVIC_Init(&NVIC_InitStructure);//启用TIM2外设控制TIM_Cmd(TIM2,ENABLE);
}内部时钟中断,利用TIM2作为时间中断,每隔一秒钟,将会进入中断函数。
Encoder.h
#ifndef __ENCODER_H__
#define __ENCODER_H__void Encoder_Init();
int16_t Encoder_Get();#endifEncoder.c
#include "stm32f10x.h" // Device headervoid Encoder_Init()
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);//编码器接口模式相当于接入一个外设时钟TIM_TimeBaseInitTypeDef TimeBaseInitStructure;TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;TimeBaseInitStructure.TIM_Period=65535-1; //ARRTimeBaseInitStructure.TIM_Prescaler=1-1; //PSCTimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM3,&TimeBaseInitStructure);//输入捕获TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel=TIM_Channel_1;TIM_ICInitStructure.TIM_ICFilter=0xF;TIM_ICInit(TIM3,&TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel=TIM_Channel_2;TIM_ICInitStructure.TIM_ICFilter=0xF;TIM_ICInit(TIM3,&TIM_ICInitStructure);//编码接口器TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);//设置两个触发极性为相同的//启用TIM外设TIM_Cmd(TIM3,ENABLE);
}
//获取速度值,获取后将计数器清0
int16_t Encoder_Get()
{int16_t Temp;Temp=TIM_GetCounter(TIM3);TIM_SetCounter(TIM3,0);return Temp;
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
#include "Timer.h"int16_t Speed;int main()
{OLED_Init();Timer_Init();Encoder_Init();OLED_ShowString(1,1,"Speed:");while(1){OLED_ShowSignedNum(1,7,Speed,4);}
}
//中断函数
void TIM2_IRQHandler()
{if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET){//将数值赋给SpeedSpeed=Encoder_Get();TIM_ClearITPendingBit(TIM2,TIM_IT_Update);}
}相关文章:
STM32--TIM定时器(3)
文章目录 输入捕获简介频率测量输入捕获通道输入捕获基本结构PWMI的基本结构输入捕获模式测量PWM频率和占空比代码 编码器接口正交编码器工作模式接口基本结构TIM编码接口器测速代码: 输入捕获简介 输入捕获IC(Input Capture),是处理器捕获外部输入信号…...

爬虫框架- feapder + 爬虫管理系统 - feaplat 的学习简记
文章目录 feapder 的使用feaplat 爬虫管理系统部署 feapder 的使用 feapder是一款上手简单,功能强大的Python爬虫框架 feapder 官方文档 文档写的很详细,可以直接上手。 基本命令: 创建爬虫项目 feapder create -p first-project创建爬虫 …...

设计模式详解-享元模式
类型:结构型模式 实现原理:尝试重用现有的同类对象,如果未找到匹配的对象,则创建新对象 目的:减少创建对象的数量以减少内存占用和提高性能。 解决的问题:大量的对象可能造成的内存溢出问题 解决方法&a…...

BDA初级分析——用SQL筛选数据
一、用SQL对数据分组 GROUP BY Group by,按...分组 作用:根据给定字段进行字段的分组,通常和聚合函数配合使用,实现分组的分析 写法:select ...from ...group by 字段名 (也可以是多个字段) GROUP BY的逻辑 SELECT gender,COUNT(user_id) …...
(成功踩坑)electron-builder打包过程中报错
目录 注意:文中的解决方法2,一定全部看完,再进行操作,有坑 背景 报错1: 报错2: 1.原因:网络连接失败 2.解决方法1: 3.解决方法2: 3.1查看缺少什么资源文件 3.2去淘…...
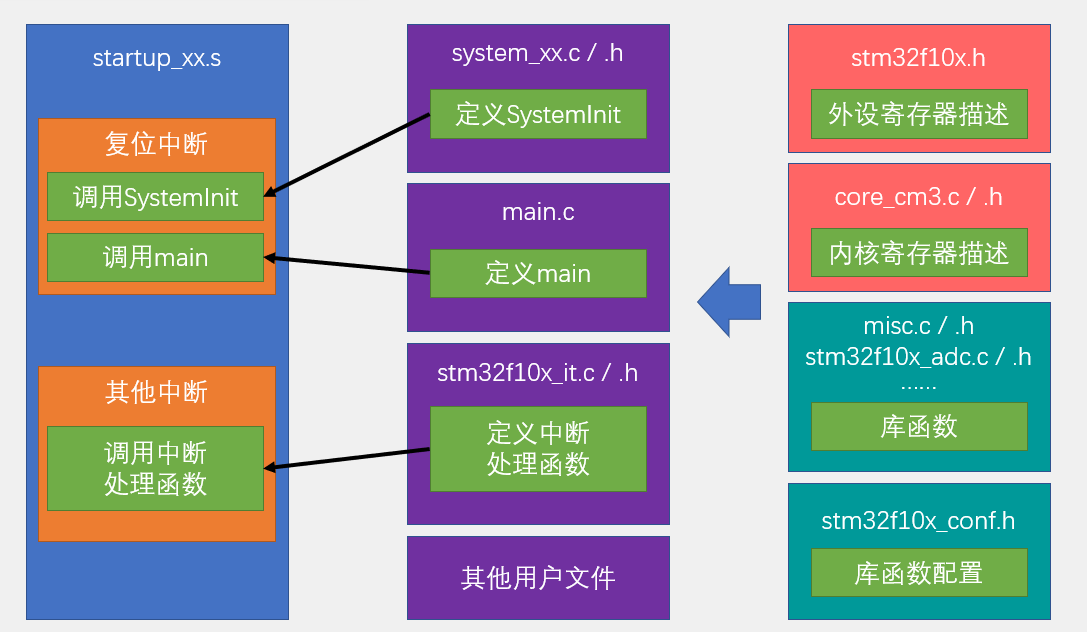
【STM32】 工程
🚩 WRITE IN FRONT 🚩 🔎 介绍:"謓泽"正在路上朝着"攻城狮"方向"前进四" 🔎🏅 荣誉:2021|2022年度博客之星物联网与嵌入式开发TOP5|TOP4、2021|2022博客之星TO…...
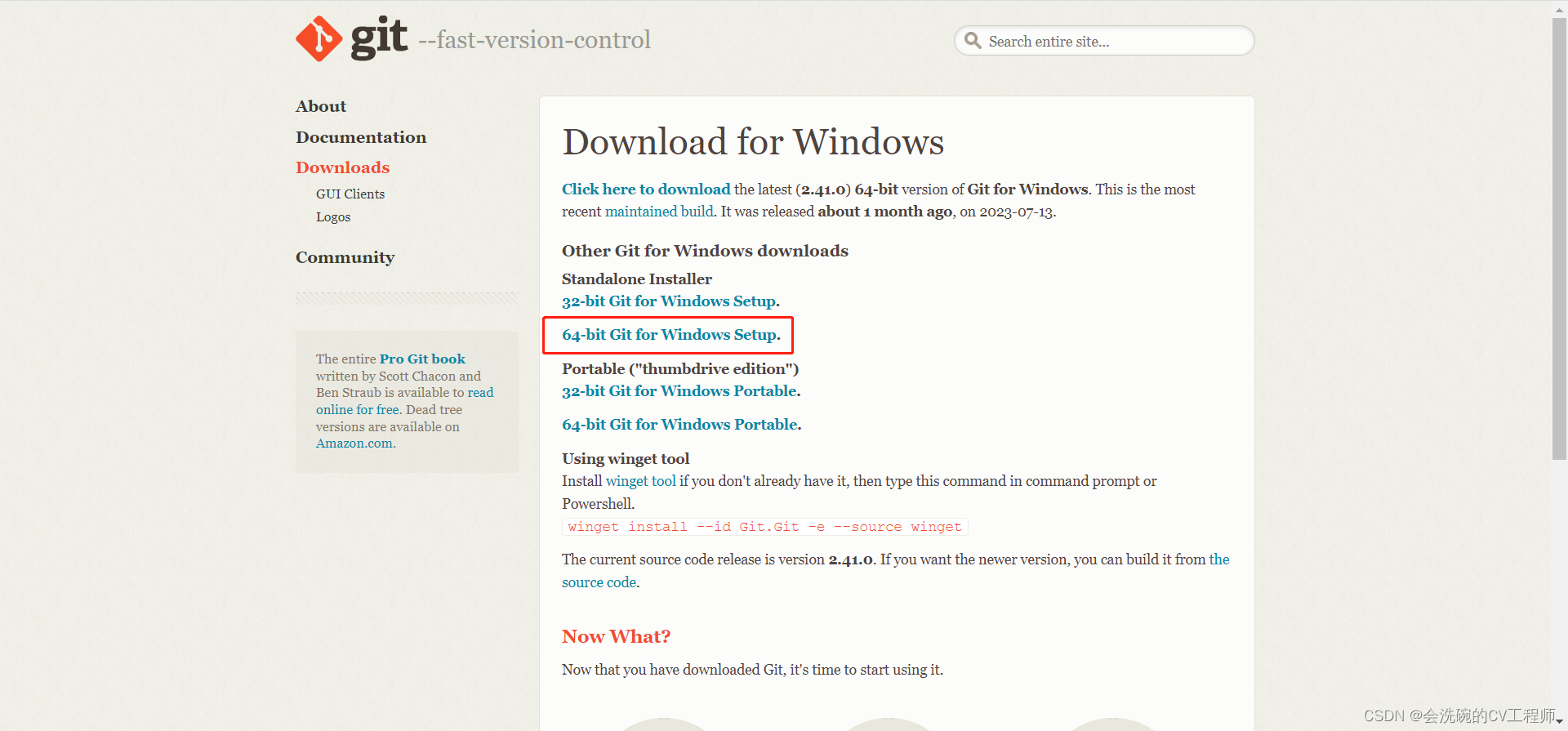
Git概述
目录 一、什么是Git 二、什么是版本控制系统 三、Git和SVN对比 SVN集中式 SVN优缺点 Git分布式 Git优缺点 四、Git工作流程 四个工作区域 工作流程 五、Git下载与安装 一、什么是Git 很多人都知道,林纳斯托瓦兹在1991年创建了开源的Linux,从…...
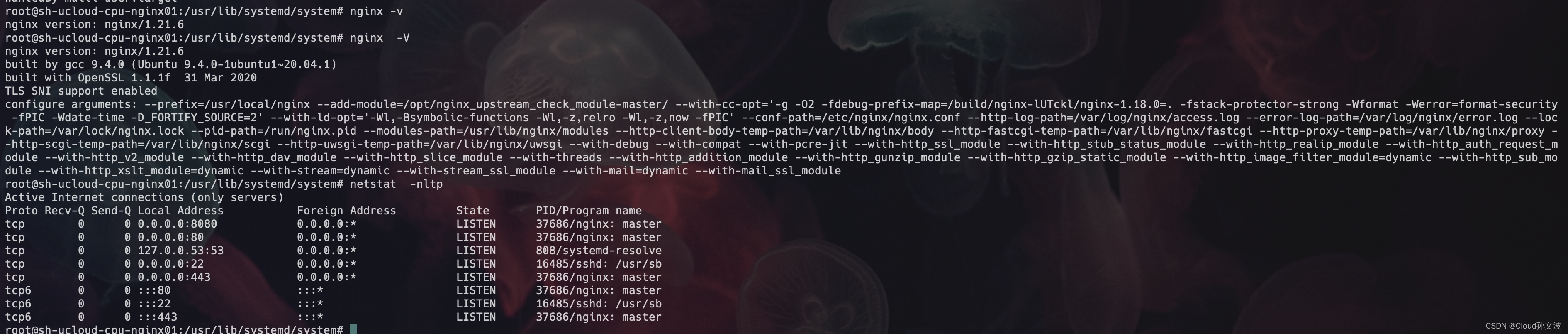
ubuntu 编译安装nginx及安装nginx_upstream_check_module模块
如果有帮助到你,麻烦点个赞呗~ 一、下载安装包 # 下载nginx_upstream_check_module模块 wget https://codeload.github.com/yaoweibin/nginx_upstream_check_module/zip/master# 解压 unzip master# 下载nginx 1.21.6 wget https://github.com/nginx/…...
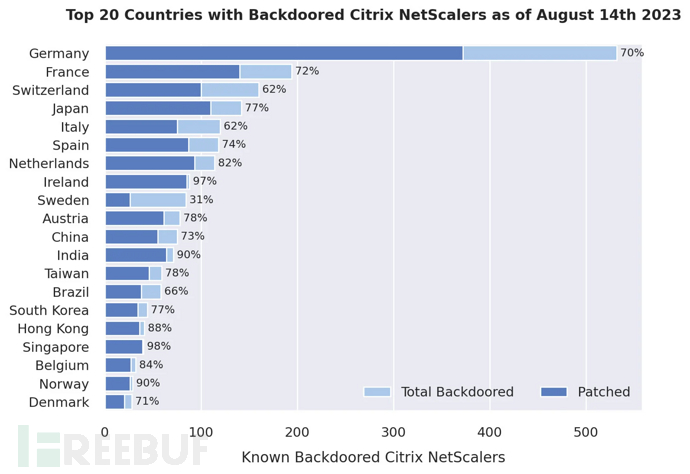
近 2000 台 Citrix NetScaler 服务器遭到破坏
Bleeping Computer 网站披露在某次大规模网络攻击活动中,一名攻击者利用被追踪为 CVE-2023-3519 的高危远程代码执行漏洞,入侵了近 2000 台 Citrix NetScaler 服务器。 研究人员表示在管理员安装漏洞补丁之前已经有 1200 多台服务器被设置了后门&#x…...
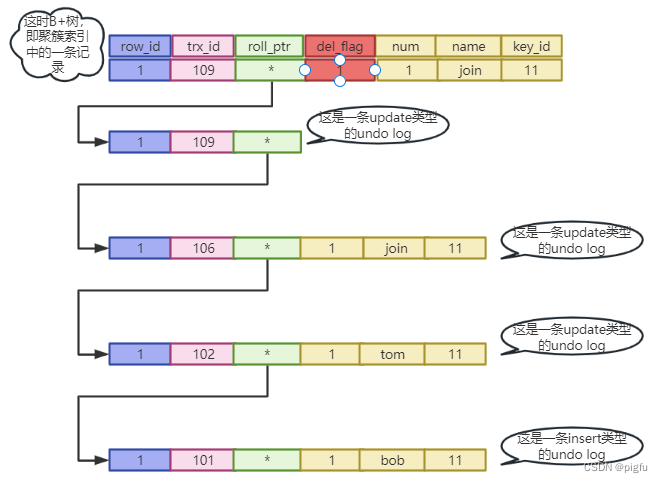
MySQL MVCC的详解之Read View
文章目录 概要一、基于UNDO LOG的版本链1.1、行记录结构1.2、了解UNDO LOG1.3、版本链 二、Read View2.1、判定机制 三、参考 概要 在上文中,我们提到了MVCC(Multi-Version Concurrency Control)多版本并发控制,是通过undo log来实现的。那具…...
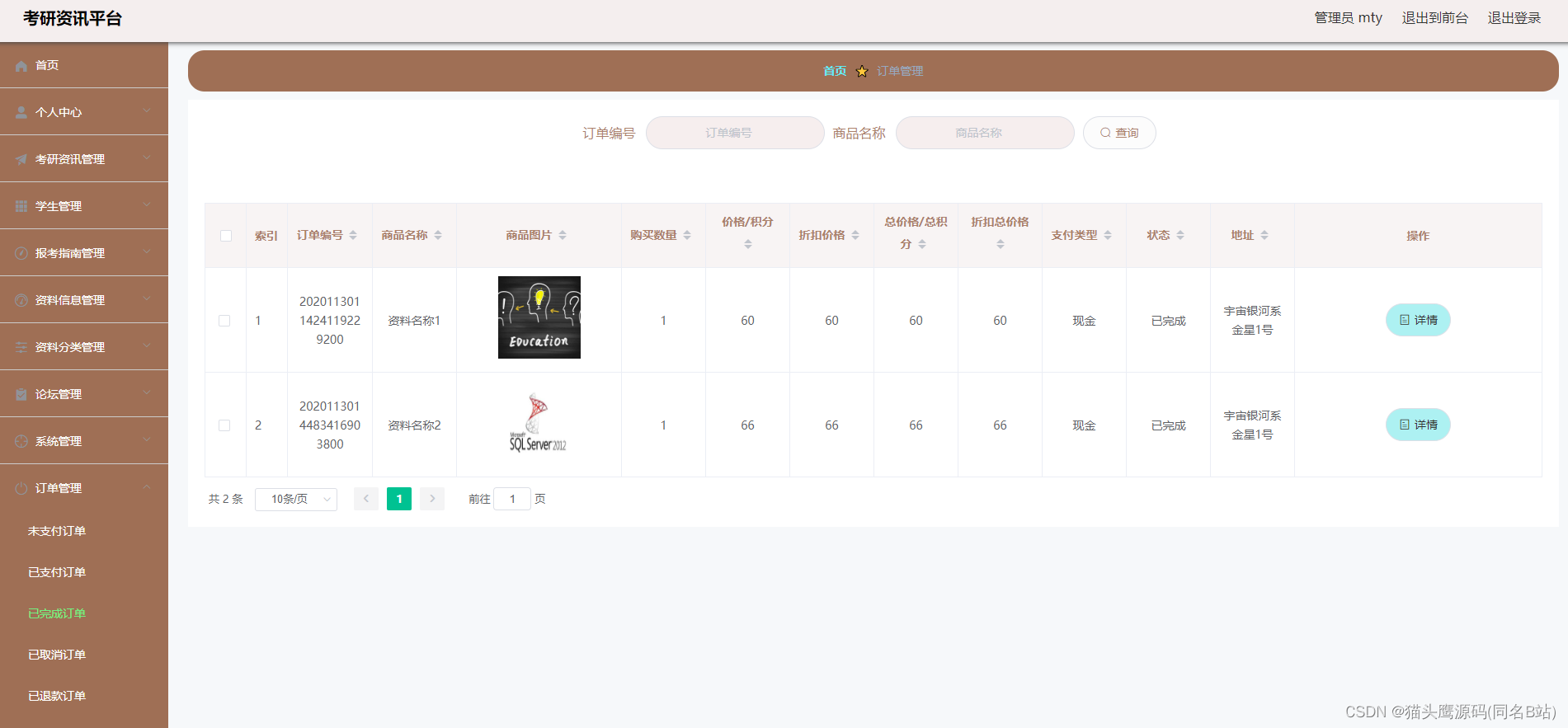
基于springboot+vue的考研资讯平台(前后端分离)
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战 主要内容:毕业设计(Javaweb项目|小程序等)、简历模板、学习资料、面试题库、技术咨询 文末联系获取 项目介绍…...
学习网络编程No.3【socket理论实战】
引言: 北京时间:2023/8/12/15:32,自前天晚上更新完文章,看了一下鹅厂新出的《扫毒3》摆烂至现在,不知道是长大了,还是近年港片就那样,给我的感觉不是很好,也可能是国内市场对港片不…...
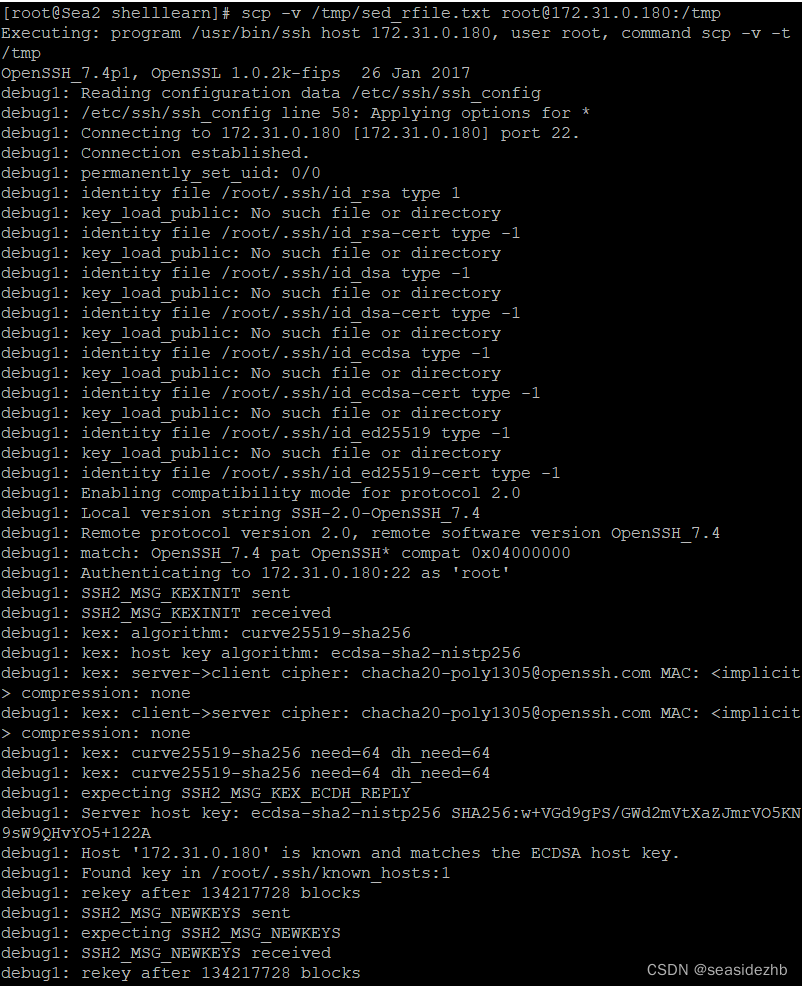
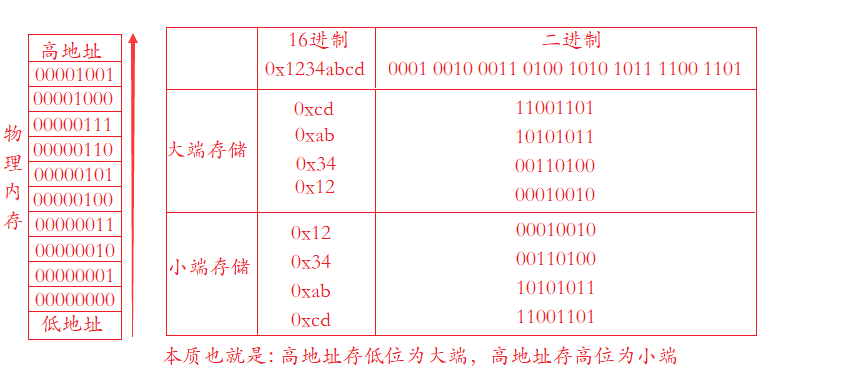
Linux学习之ssh和scp
ls /etc/ssh可以看到这个目录下有一些文件,而/etc/ssh/ssh_config是客户端配置文件,/etc/ssh/sshd_config是服务端配置文件。 cat -n /etc/ssh/sshd_config | grep "Port "可以看一下sshd监听端口的配置信息,发现这个配置端口是22…...
录制游戏视频的软件有哪些?分享3款软件!
“有录制游戏视频的软件推荐吗?最近迷上了网游,想录制点自己高端操作的游戏画面,但是不知道用什么软件录屏比较好,就想问问大家,有没有好用的录制游戏视频软件。” 在游戏领域,玩家们喜欢通过录制游戏视频…...
每日一题——螺旋矩阵
题目 给定一个m x n大小的矩阵(m行,n列),按螺旋的顺序返回矩阵中的所有元素。 数据范围:0≤n,m≤10,矩阵中任意元素都满足 ∣val∣≤100 要求:空间复杂度 O(nm) ,时间复杂度 O(nm)…...
每天10个小知识点)
前端面试的性能优化部分(12)每天10个小知识点
目录 系列文章目录前端面试的性能优化部分(1)每天10个小知识点前端面试的性能优化部分(2)每天10个小知识点前端面试的性能优化部分(3)每天10个小知识点前端面试的性能优化部分(4)每天…...
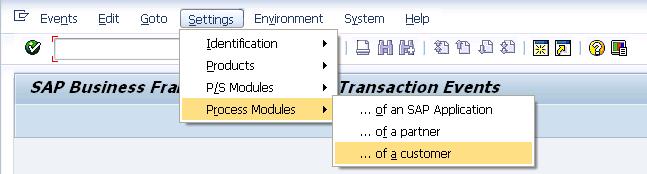
SAP BTEs 业务交易事件/增强(Business Transaction Event)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 前言 一、BTEs是什么? 二、使用步骤 1.查找BTE event 2.处理FM 总结 前言 SAP BTEs是一种新型的增强方式,可以通过事务代码FIFB打开&#…...

leetcode做题笔记90. 子集 II
给你一个整数数组 nums ,其中可能包含重复元素,请你返回该数组所有可能的子集(幂集)。 解集 不能 包含重复的子集。返回的解集中,子集可以按 任意顺序 排列。 思路一:回溯 int comp(const void* a, cons…...

“开发和运维”只是一个开始,最终目标是构建高质量的软件工程
随着技术的飞速发展,软件行业不断寻求改进和创新的方法来提供更高质量的产品。在这方面,DevOps已经展现出了巨大的潜力。通过打破开发和运维之间的壁垒,DevOps将持续集成、持续交付和自动化流程引入到软件开发中,使团队能够更快地…...

自学C#,要懂得善用MSDN
很多初学者学习编程,都会通过看别人写的教程、或者录制的视频,来学习。 这是一个非常好的途径,因为这个是非常高效的。 但是这样,存在两个问题: 1、教程不够全面:任何再好的教程,都无法囊括所…...

基于Playwright的Instagram自动化技能包:原理、实现与智能体集成
1. 项目概述与核心价值最近在折腾个人智能助理,想让它能帮我处理一些社交媒体上的琐事,比如自动查看Instagram上的新动态、给特定帖子点赞或者保存一些有趣的图片。在网上搜了一圈,发现了一个叫adamanz/instagram-skill的开源项目,…...

如何用LRCGET歌词下载神器一键解决数千首离线音乐歌词同步难题
如何用LRCGET歌词下载神器一键解决数千首离线音乐歌词同步难题 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否拥有一个庞大的离线音乐库&#x…...

回流平台深耕闲置翡翠流通,以数字化服务激活珠宝产业新动能
据中国珠宝玉石首饰行业协会数据,我国珠宝玉石首饰产业市场规模持续扩大,翡翠玉石作为第二大珠宝消费品类,市场存量可观。与此同时,发达国家二手高端消费品交易占整个高端消费品市场的20%至30%,我国目前占比约5%&#…...

设计工程化实践:将设计思维转化为开发者技能的工具探索
1. 项目概述:当设计思维遇上代码技能最近在GitHub上看到一个挺有意思的项目,叫Arthurescc/design-fusion.skill。光看这个名字,就让我这个在设计和开发交叉领域摸爬滚打了十来年的老手眼前一亮。“Design Fusion”直译是“设计融合”…...
)
WinHex不只是编辑器:手把手教你用它做磁盘镜像与克隆(避坑指南)
WinHex专业磁盘镜像与克隆实战指南:从取证备份到避坑技巧 1. 为什么WinHex是磁盘操作的首选利器 在数据恢复和取证领域,专业工具的选择往往决定了工作的成败。WinHex作为一款久经考验的十六进制编辑器,其功能远超出普通用户的想象。不同于常规…...

别再“另存为”了!职场人90%的无效内耗都源于这一个操作。企业文档如何管理?
加班到晚上八点,职场人小林终于改完了项目方案,随手点了“另存为”,命名为“方案_最终版.doc“后发到了工作群。本以为可以安心下班,群里却炸锅了:“小林,你这个最终版和我手里的不一样啊?”“我…...

避开这些坑!用Python做模糊控制项目时,关于隶属函数和规则表的5个常见误区
避开这些坑!用Python做模糊控制项目时,关于隶属函数和规则表的5个常见误区 第一次用Python实现模糊控制系统时,那种兴奋感我至今记得——仿佛打开了人工智能的另一扇门。但很快,这种兴奋就被各种报错和不符合预期的结果浇灭了。记…...

open62541批量读写踩坑实录:从‘UA_ReadRequest’配置到结果解析的完整避坑指南
open62541批量读写深度实战:从核心配置到异常处理的完整解决方案 在工业自动化与物联网系统开发中,OPC UA协议已成为设备互联的事实标准。作为开源实现的佼佼者,open62541为开发者提供了强大而灵活的工具集。但当面对需要高效处理大量节点数据…...

error while updating dependencies: node_modules包资源权限报错 缓存包构建
vue3vite - 解决报错error while updating dependencies:Error:EACCES:permission denied,mkdir ‘x‘(系统权限问题) 问题说明 在vite vue3项目开发中,出现报错: [vitel error while updating dependencies: Error:EACCES:permission deni…...

如何彻底解决Windows电脑自动锁屏问题:终极鼠标模拟工具使用指南
如何彻底解决Windows电脑自动锁屏问题:终极鼠标模拟工具使用指南 【免费下载链接】mousejiggler Mouse Jiggler is a very simple piece of software whose sole function is to "fake" mouse input to Windows, and jiggle the mouse pointer back and f…...