opencv-手势识别
# HandTrackingModule.py
import cv2
import mediapipe as mpclass HandDetector:"""使用mediapipe库查找手。导出地标像素格式。添加了额外的功能。如查找方式,许多手指向上或两个手指之间的距离。而且提供找到的手的边界框信息。"""def __init__(self, mode=False, maxHands=2, detectionCon=0.5, minTrackCon = 0.5):""":param mode: 在静态模式下,对每个图像进行检测:param maxHands: 要检测的最大手数:param detectionCon: 最小检测置信度:param minTrackCon: 最小跟踪置信度"""self.mode = modeself.maxHands = maxHandsself.modelComplex = Falseself.detectionCon = detectionConself.minTrackCon = minTrackCon# 初始化手部识别模型self.mpHands = mp.solutions.handsself.hands = self.mpHands.Hands(self.mode, self.maxHands, self.modelComplex,self.detectionCon, self.minTrackCon)self.mpDraw = mp.solutions.drawing_utils # 初始化绘图器self.tipIds = [4, 8, 12, 16, 20] # 指尖列表self.fingers = []self.lmList = []def findHands(self, img, draw=True):"""从图像(BRG)中找到手部。:param img: 用于查找手的图像。:param draw: 在图像上绘制输出的标志。:return: 带或不带图形的图像"""imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 将传入的图像由BGR模式转标准的Opencv模式——RGB模式,self.results = self.hands.process(imgRGB)if self.results.multi_hand_landmarks:for handLms in self.results.multi_hand_landmarks:if draw:self.mpDraw.draw_landmarks(img, handLms,self.mpHands.HAND_CONNECTIONS)return imgdef findPosition(self, img, handNo=0, draw=True):"""查找单手的地标并将其放入列表中像素格式。还可以返回手部周围的边界框。:param img: 要查找的主图像:param handNo: 如果检测到多只手,则为手部id:param draw: 在图像上绘制输出的标志。(默认绘制矩形框):return: 像素格式的手部关节位置列表;手部边界框"""xList = []yList = []bbox = []bboxInfo =[]self.lmList = []if self.results.multi_hand_landmarks:myHand = self.results.multi_hand_landmarks[handNo]for id, lm in enumerate(myHand.landmark):h, w, c = img.shapepx, py = int(lm.x * w), int(lm.y * h)xList.append(px)yList.append(py)self.lmList.append([px, py])if draw:cv2.circle(img, (px, py), 5, (255, 0, 255), cv2.FILLED)xmin, xmax = min(xList), max(xList)ymin, ymax = min(yList), max(yList)boxW, boxH = xmax - xmin, ymax - yminbbox = xmin, ymin, boxW, boxHcx, cy = bbox[0] + (bbox[2] // 2), \bbox[1] + (bbox[3] // 2)bboxInfo = {"id": id, "bbox": bbox,"center": (cx, cy)}if draw:cv2.rectangle(img, (bbox[0] - 20, bbox[1] - 20),(bbox[0] + bbox[2] + 20, bbox[1] + bbox[3] + 20),(0, 255, 0), 2)return self.lmList, bboxInfodef fingersUp(self):"""查找列表中打开并返回的手指数。会分别考虑左手和右手:return:竖起手指的列表"""if self.results.multi_hand_landmarks:myHandType = self.handType()fingers = []# Thumbif myHandType == "Right":if self.lmList[self.tipIds[0]][0] > self.lmList[self.tipIds[0] - 1][0]:fingers.append(1)else:fingers.append(0)else:if self.lmList[self.tipIds[0]][0] < self.lmList[self.tipIds[0] - 1][0]:fingers.append(1)else:fingers.append(0)# 4 Fingersfor id in range(1, 5):if self.lmList[self.tipIds[id]][1] < self.lmList[self.tipIds[id] - 2][1]:fingers.append(1)else:fingers.append(0)return fingersdef handType(self):"""检查传入的手部是左还是右:return: "Right" 或 "Left""""if self.results.multi_hand_landmarks:if self.lmList[17][0] < self.lmList[5][0]:return "Right"else:return "Left"import cv2
from HandTrackingModule import HandDetectorclass Main:def __init__(self):self.camera = cv2.VideoCapture(0,cv2.CAP_DSHOW)self.camera.set(3, 1280)self.camera.set(4, 720)def Gesture_recognition(self):while True:self.detector = HandDetector()frame, img = self.camera.read()img = self.detector.findHands(img)lmList, bbox = self.detector.findPosition(img)if lmList:x_1, y_1 = bbox["bbox"][0], bbox["bbox"][1]x1, x2, x3, x4, x5 = self.detector.fingersUp()if (x2 == 1 and x3 == 1) and (x4 == 0 and x5 == 0 and x1 == 0):cv2.putText(img, "2_TWO", (x_1, y_1), cv2.FONT_HERSHEY_PLAIN, 3,(0, 0, 255), 3)elif (x2 == 1 and x3 == 1 and x4 == 1) and (x1 == 0 and x5 == 0):cv2.putText(img, "3_THREE", (x_1, y_1), cv2.FONT_HERSHEY_PLAIN, 3,(0, 0, 255), 3)elif (x2 == 1 and x3 == 1 and x4 == 1 and x5 == 1) and (x1 == 0):cv2.putText(img, "4_FOUR", (x_1, y_1), cv2.FONT_HERSHEY_PLAIN, 3,(0, 0, 255), 3)elif x1 == 1 and x2 == 1 and x3 == 1 and x4 == 1 and x5 == 1:cv2.putText(img, "5_FIVE", (x_1, y_1), cv2.FONT_HERSHEY_PLAIN, 3,(0, 0, 255), 3)elif x2 == 1 and (x1 == 0, x3 == 0, x4 == 0, x5 == 0):cv2.putText(img, "1_ONE", (x_1, y_1), cv2.FONT_HERSHEY_PLAIN, 3,(0, 0, 255), 3)elif x1 and (x2 == 0, x3 == 0, x4 == 0, x5 == 0):cv2.putText(img, "GOOD!", (x_1, y_1), cv2.FONT_HERSHEY_PLAIN, 3,(0, 0, 255), 3)cv2.imshow("camera", img)if cv2.getWindowProperty('camera', cv2.WND_PROP_VISIBLE) < 1:breakcv2.waitKey(1)if cv2.waitKey(1) & 0xFF == ord("q"):breakif __name__ == '__main__':Solution = Main()Solution.Gesture_recognition()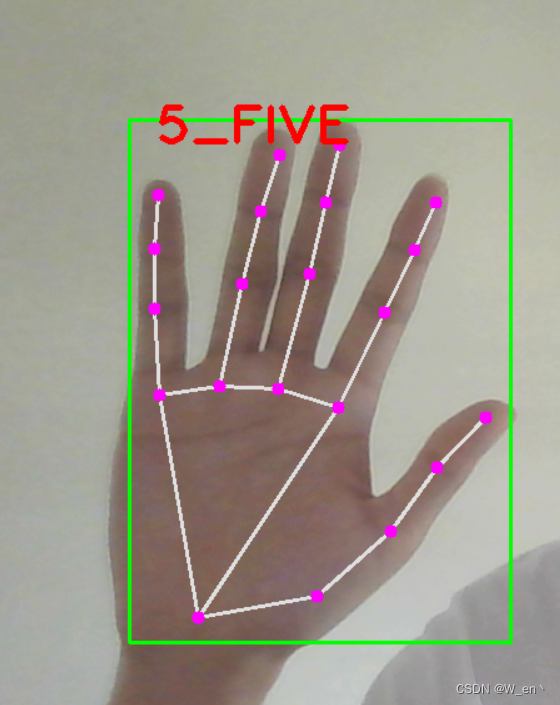
相关文章:
opencv-手势识别
# HandTrackingModule.py import cv2 import mediapipe as mpclass HandDetector:"""使用mediapipe库查找手。导出地标像素格式。添加了额外的功能。如查找方式,许多手指向上或两个手指之间的距离。而且提供找到的手的边界框信息。"""…...
qcdisplaycfg_ADP_STAR_LA.xml 配置文件解析)
【SA8295P 源码分析】10 - HQX Display(OpenWFD)qcdisplaycfg_ADP_STAR_LA.xml 配置文件解析
【SA8295P 源码分析】10 - HQX Display(OpenWFD)qcdisplaycfg_ADP_STAR_LA.xml 配置文件解析 一、HQX Display 介绍1.1 OpenWF Display Driver二、HQX Display 配置文件参数解析2.1 qcdisplaycfg.xml 配置文件2.1 配置两个 DPUs in QNX2.1.1 配置 graphics_ADP_STAR.conf : …...

达梦数据库权限和预定角色介绍
概述 本文对达梦数据库数据库和对象权限及DM预定义角色及角色创建进行介绍。 1.权限管理 用户权限有两类:数据库权限和对象权限。 数据库权限主要是指针对数据库对象的创建、删除、修改的权限,对数据库备份等权限。 数据库权限一般由 SYSDBA、SYSAU…...
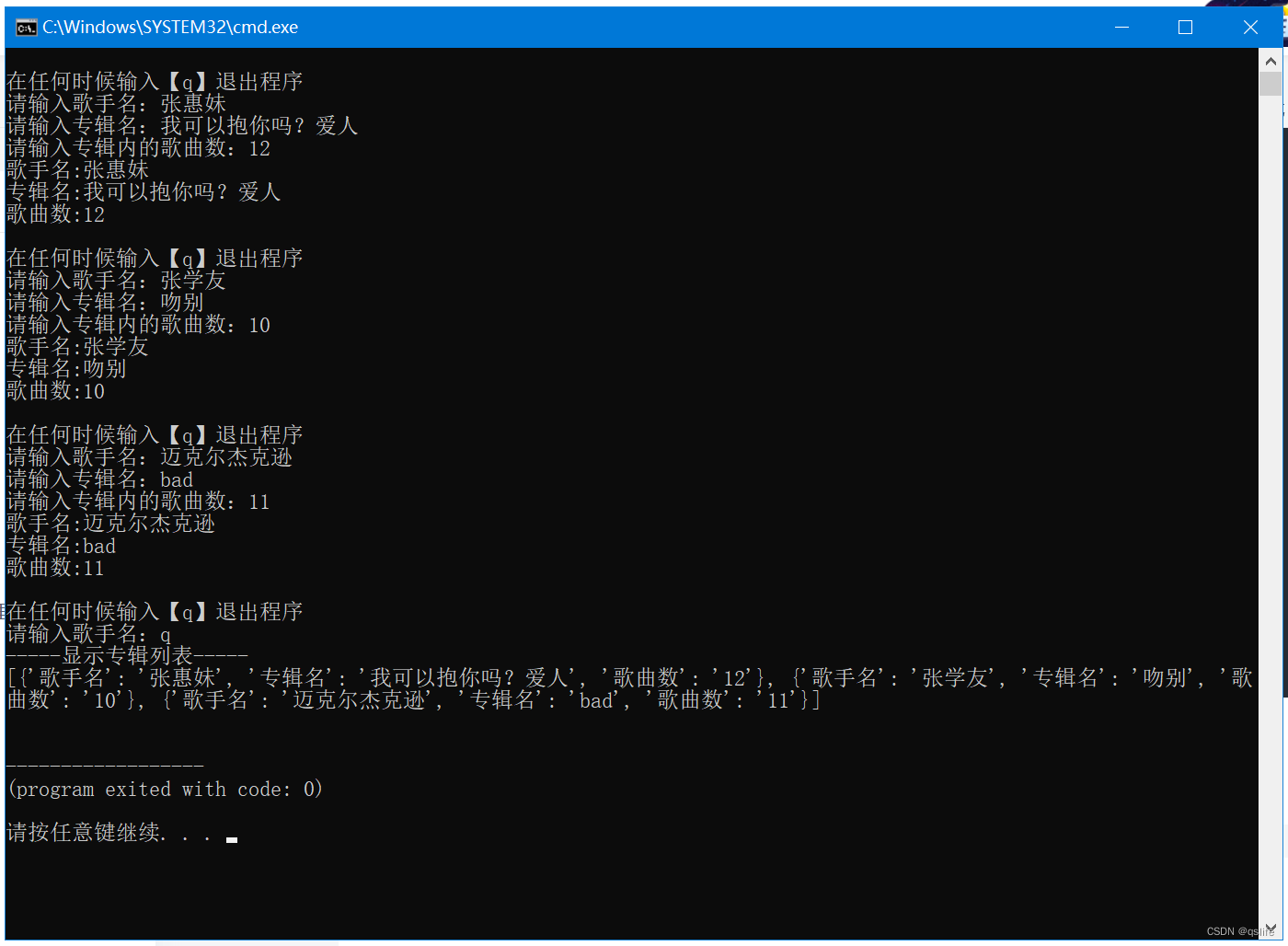
Python编程从入门到实践_8-8 用户的专辑_答案
Python编程从入门到实践_8-8 用户的专辑_答案 我也看了一些其他人的答案,很多的答案存在问题,每次调用函数 make_album() 后生成一个专辑字典会覆盖上次调用函数 make_album() 生成的字典,不符合题意。 我采取的解决方案是添加一个空列表 …...
HummingBird 基于 Go 开源超轻量级 IoT 物联网平台
蜂鸟(HummingBird) 是 Go 语言实现的超轻量级物联网开发平台,包含设备接入、产品管理、物模型、告警中心、规则引擎等丰富功能模块。系统采用GoLang编写,占用内存极低, 单物理机可实现百设备的连接。 在数据存储上&…...

10.小程序样式
样式 css部分样式不支持,并且添加了rpx属性,小程序开发的时候应该使用rpx,而不是px,因为rpx是将移动端的屏幕大小分为750份,会自动按设备的大小去适配;我们在开发时应该以iphone6为基准的设备进行开发&…...
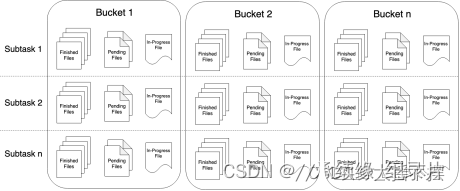
Flink 流式读写文件、文件夹
文章目录 一、flink 流式读取文件夹、文件二、flink 写入文件系统——StreamFileSink三、查看完整代码 一、flink 流式读取文件夹、文件 Apache Flink针对文件系统实现了一个可重置的source连接器,将文件看作流来读取数据。如下面的例子所示: StreamExe…...

【SA8295P 源码分析】64 - QNX 与 Android GVM 显示 Dump 图片方法汇总
【SA8295P 源码分析】64 - QNX 与 Android GVM 显示 Dump 图片方法汇总 一、QNX侧1.1 surfacedump 功能1.2 screenshot 功能二、Android GVM 侧2.1 screencap -p 导出 PNG 图片2.2 screencap 不加 -p 参数,导出 RGB32 图片2.3 dumpsys SurfaceFlinger --display-id 方法系列文…...

字符串旋转(1)
目录 编辑 题目要求😍: 题目内容❤: 题目分析📚: 主函数部分📕:编辑 方法一🐒: 方法二🐒🐒: 方法三🐒…...

【SA8295P 源码分析】13 - Android GVM 虚拟机 QUPv3 UART / SPI / I2C功能配置及透传配置
【SA8295P 源码分析】13 - Android GVM 虚拟机 QUPv3 UART / SPI / I2C功能配置及透传配置 一、QUP v3 介绍二、QUP v3 UART 功能配置2.1 TrustZone 域 Uart 资源权限配置:以 QUPV3_0_SE2 为例2.2 QNX Host 域关闭 Uart 资源:以 QUPV3_0_SE2 为例2.3 Android Kernel 域使能 U…...
STM32 F103C8T6学习笔记10:OLED显示屏GIF动图取模—简易时钟—动图手表的制作~
今日尝试做一款有动图的OLED实时时钟,本文需要现学一个OLED的GIF动图取模 其余需要的知识点有不会的可以去我 STM32 F103C8T6学习笔记 系列专栏自己查阅把,闲话不多,直接开肝~~~ 文章提供源码,测试工程下载,测试效…...
大数据课程K3——Spark的常用案例
文章作者邮箱:yugongshiye@sina.cn 地址:广东惠州 ▲ 本章节目的 ⚪ 掌握Spark的常用案例——WordCount; ⚪ 掌握Spark的常用案例——求平均值; ⚪ 掌握Spark的常用案例——求最大值和最小值; ⚪ 掌握Spark的常用案例——TopK; ⚪ 掌握Spark的常用案例…...

85-最大矩阵
题目 给定一个仅包含 0 和 1 、大小为 rows x cols 的二维二进制矩阵,找出只包含 1 的最大矩形,并返回其面积。 示例 1: 输入:matrix [[“1”,“0”,“1”,“0”,“0”],[“1”,“0”,“1”,“1”,“1”],[“1”,“1”,“1”,…...

8.3 【C语言】通过指针引用数组
8.3.1 数组元素的指针 所谓数组元素的指针就是数组元素的地址。 可以用一个指针变量指向一个数组元素。例如: int a[10]{1,3,5,7,9,11,13,15,17,19}; int *p; p&a[0]; 引用数组元素可以用下标法,也可以用指针法…...

基于Flink CDC实时同步PostgreSQL与Tidb【Flink SQL Client模式下亲测可行,详细教程】
文章目录 一、PostgreSQL作为数据来源(source),由flink读取1.postgre安装与配置2.flink安装与配置3.flink cdc postgre配置3.1 postgre配置(for flink cdc)3.2 flink cdc postgres的jar包下载 4.flink cdc postgre测试…...
Vue-5.编译器Idea
Vue专栏(帮助你搭建一个优秀的Vue架子) Vue-1.零基础学习Vue Vue-2.Nodejs的介绍和安装 Vue-3.Vue简介 Vue-4.编译器VsCode Vue-5.编译器Idea Vue-6.编译器webstorm Vue-7.命令创建Vue项目 Vue-8.Vue项目配置详解 Vue-9.集成(.editorconfig、…...

qiuzhiji3
本篇想介绍一下慧与,这里的工作氛围和企业文化令人难忘,希望更多人了解它 也想探讨一下不同的文化铸就的不同企业,究竟有哪些差别。 本篇将从我个人角度出发描述慧与。 2022/3/16至2023/7/31 本篇初次写于2023年8月20日 说起来在毕业之前那段…...

JVM——垃圾回收(垃圾回收算法+分代垃圾回收+垃圾回收器)
1.如何判断对象可以回收 1.1引用计数法 只要一个对象被其他对象所引用,就要让该对象的技术加1,某个对象不再引用其,则让它计数减1。当计数变为0时就可以作为垃圾被回收。 有一个弊端叫做循环引用,两个的引用计数都是1ÿ…...

QT TLS initialization failed问题(已解决) QT基础入门【网络编程】openssl
问题: qt.network.ssl: QSslSocket::connectToHostEncrypted: TLS initialization failed 这个问题的出现主要是使用了https请求:HTTPS ≈ HTTP + SSL,即有了加密层的HTTP 所以Qt 组件库需要OpenSSL dll 文件支持HTTPS 解决: 1.加入以下两行代码获取QT是否支持opensll以…...

SpringMVC之获取请求参数
文章目录 前言一、通过ServletAPI获取二、通过控制器方法的形参获取请求参数三、注解1.RequestParam2.RequestHeader3.CookieValue前面的代码总和:4.通过POJO获取请求参数 三、解决获取请求参数的乱码问题总结 前言 下面用到了thymeleaf,不知道的可以看…...

开源项目metabase-mcp-server:用MCP协议连接Metabase与AI智能体,实现对话式数据分析
1. 项目概述:当开源BI工具遇上AI智能体如果你和我一样,在日常工作中既要用Metabase做数据可视化看板,又要和Claude、Cursor这类AI助手打交道,那你肯定也遇到过这样的痛点:想问问AI“上个月华东区的销售额趋势”&#x…...

ARM MPMC内存控制器架构与优化策略
1. ARM MPMC内存控制器架构解析在嵌入式系统设计中,内存控制器作为处理器与存储设备之间的桥梁,其性能直接影响整个系统的运行效率。ARM PrimeCell多端口内存控制器(MPMC)是一种高度可配置的IP核,支持与多种类型存储设备的连接,包…...

LLM RAG还值得做吗?今天一下就顿悟了
在企业级AI应用领域,RAG(检索增强生成)不仅值得深耕,更是当前唯一能站稳脚跟的核心护城河。曾有人断言长上下文窗口(Long Context)会取代RAG,但这一说法早在2024年就被彻底证伪,进入…...

技术人必备的Chrome插件清单:第7个让调试效率翻倍
对于软件测试从业者而言,浏览器早已不是单纯的信息浏览窗口,而是集接口调试、性能分析、元素定位、辅助功能验证于一体的核心工作站。面对日益复杂的Web应用和紧迫的交付周期,一套精悍的Chrome插件组合往往能带来远超预期的效率回报。本文从测…...

3PEAK思瑞浦 TPA3532-SO1R SOP8 运算放大器
特性 超低输入偏置电流:-在TA25C时最大土1pA(实验室测试限值)-在-40C至125C(实验室测试限值)下,最大土30皮安 低输入失调电压:250V(最大值)集成保护缓冲器,最大偏移电压200V低电压噪声密度:18nV/Hz(在1kHz时). 宽带宽:2.1MHz 供电电压:4.5V至16V(2.25V至…...

收藏!小白程序员必备:2026年AI大模型就业新机遇与学习路线指南
根据世界经济论坛报告,到2030年科技、数据、AI等领域将创造1.7亿工作机会,同时淘汰9200万个岗位。AI市场规模预计到2034年达36804.7亿美元,年复合增长率19.20%。中国AI人才需求将远超供应。文章介绍了AI运营/AIGC内容创作者、算法工程师、大模…...
)
Midjourney v7新功能全维度压测报告(v6 vs v7实测对比:提示词容错率↑47%,构图理解准确率突破92.6%)
更多请点击: https://intelliparadigm.com 第一章:Midjourney v7新功能全面解析 Midjourney v7 于2024年第三季度正式发布,标志着AI图像生成在语义理解、构图控制与跨模态一致性方面迈入新阶段。本次升级不再仅依赖提示词(prompt…...

如何用DdddOcr在3分钟内构建离线验证码识别系统
如何用DdddOcr在3分钟内构建离线验证码识别系统 【免费下载链接】ddddocr 带带弟弟 通用验证码识别OCR pypi版 项目地址: https://gitcode.com/gh_mirrors/dd/ddddocr 在当今的自动化测试、数据采集和网络安全领域,验证码识别是绕不开的技术难题。传统的在线…...

B站命令行工具bilibili-cli:极客的终端视频浏览与自动化方案
1. 项目概述:在终端里逛B站,是一种什么体验? 如果你和我一样,是个重度命令行爱好者,或者单纯觉得在浏览器里点来点去效率太低,那么今天聊的这个工具可能会让你眼前一亮。 bilibili-cli ,顾名思…...
)
别再想当然!用AD628/INA等差分放大器做单端采集,必须搞懂的共模电压计算(附Excel工具)
差分放大器单端采集实战指南:共模电压计算与设计避坑 在工业传感器接口和医疗设备信号链设计中,差分放大器常被用于单端信号采集的场景。许多工程师习惯性地认为,只要将差分放大器的负输入端接地,就能轻松实现单端转差分功能。但实…...