机器人的运动范围
声明
该系列文章仅仅展示个人的解题思路和分析过程,并非一定是优质题解,重要的是通过分析和解决问题能让我们逐渐熟练和成长,从新手到大佬离不开一个磨练的过程,加油!
原题链接
机器人的运动范围![]() https://leetcode.cn/leetbook/read/illustration-of-algorithm/9h6vo2/
https://leetcode.cn/leetbook/read/illustration-of-algorithm/9h6vo2/
算法分析
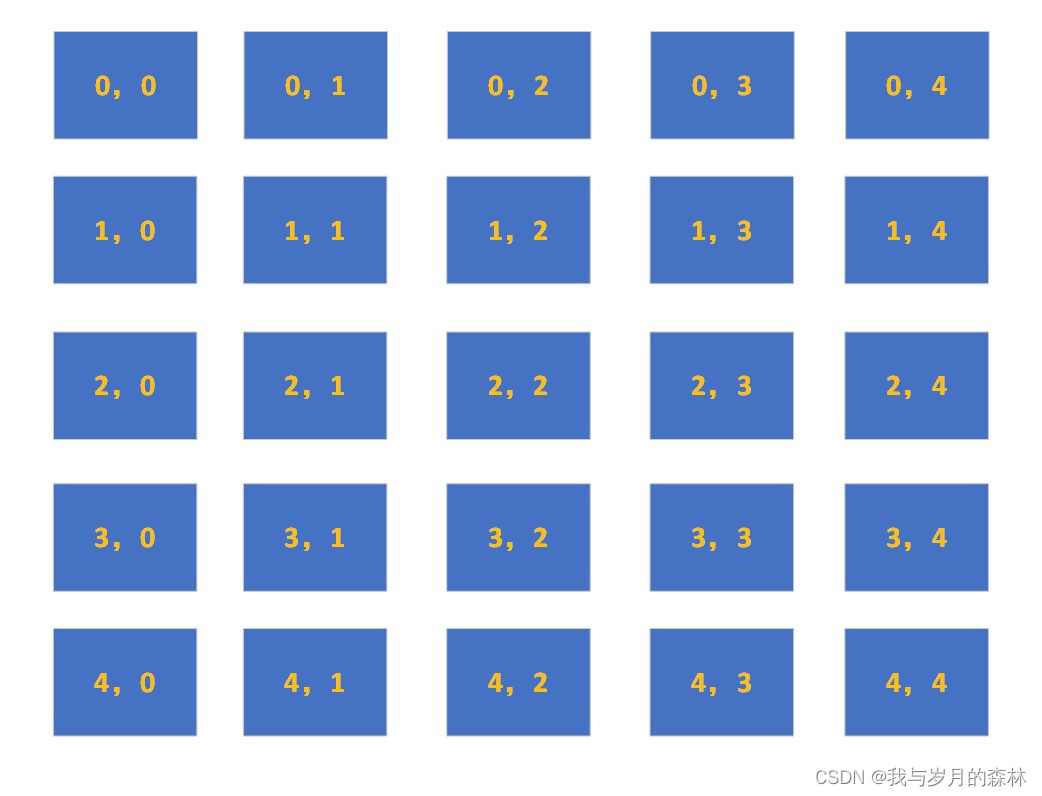
图1是机器人移动范围的网格,结合题目的描述,我们来确定变量和逻辑主体。
(1)变量:设网格的行数为m,列数为n,移动限定值为k,设单元格坐标为(x,y),[x]表示x的数位之和,[y]同理,可达坐标个数sum,已探索坐标列表list。
(2)特殊描述:
①k是用于判断移动是否合理的值,要求[x]+[y] <= k;
②数位之和:如数字45,[45]=4+5=9;
③移动方向分为上下左右,不可越界;
④起点为(0,0),1 <= m <= 100,1 <= n <= 100,0 <= k <= 20;
(3)求取[x]:
①x < 10,[x] = x;
②x >= 10,[x] = x - (x / 10) * 9;
(4)越界判断:
单元格坐标为(x,y),x属于[0,M-1],y属于[0,N-1],若x或y均满足指定取值范围则表明未越界,反之则越界。
(5)机器人移动:
传入行数、列数、当前坐标、移动限定值、可达解个数、已访问的坐标值列表。检测当前坐标是否越界,若越界则return;检测当前坐标数位和是否满足条件,若不满足则return;检测当前坐标是否重复访问,若重复访问则return;三种情况均不满足则将当前坐标添加至已访问列表中,然后继续尝试往上下左右四个方向进行移动,重复上述过程。
(6)定义一个坐标值数据结构:
用于记录横纵坐标、比较坐标以及生成基于当前坐标指定方向的坐标值。
代码示例(C#)
//主方法
public int MovingCount(int m, int n, int k)
{if (m <= 0 || n <= 0 || k < 0) return 0;int sum = 0;List<Vector2> list = new();Search(m, n, new(0, 0), k, ref sum, ref list);return sum;
}//移动方向的枚举值
private enum Direction
{unknown, left, right, up, down
}//坐标值数据结构
private struct Vector2
{public int x;//横坐标public int y;//纵坐标public Vector2(int x, int y){this.x = x;this.y = y;}//比较方法public bool CompareTo(Vector2 vector){return x == vector.x && y == vector.y;}//生成基于当前坐标指定方向的坐标值public Vector2 Generate(Direction direction){return direction switch{Direction.left => new Vector2(x - 1, y),Direction.right => new Vector2(x + 1, y),Direction.up => new Vector2(x, y + 1),Direction.down => new Vector2(x, y - 1),_ => new Vector2(x, y),};}
}//坐标搜索方法
//参数:行数、列数、坐标值、移动限定值、可达解个数、已访问的坐标值列表
private void Search(int m, int n, Vector2 vector, int k, ref int sum, ref List<Vector2> list)
{//越界检测if (vector.x < 0 || vector.x >= m || vector.y < 0 || vector.y >= n) return;//当前坐标的数位和检测if (DigitalSum(vector.x) + DigitalSum(vector.y) > k) return;//重复访问检测if (list.Exists(vec => vec.CompareTo(vector))) return;list.Add(vector);sum++;//生成当前坐标的四个方向的坐标值Vector2[] vectors ={vector.Generate(Direction.left),vector.Generate(Direction.right),vector.Generate(Direction.up),vector.Generate(Direction.down)};//搜索四个方向的坐标Search(m, n, vectors[0], k, ref sum, ref list);Search(m, n, vectors[1], k, ref sum, ref list);Search(m, n, vectors[2], k, ref sum, ref list);Search(m, n, vectors[3], k, ref sum, ref list);
}//计算指定值的数位和
private int DigitalSum(int val)
{if (val < 10) return val;return val - (val / 10) * 9;
}算法解说
根据题目要求我们需要通过一个网格来模拟机器人的移动范围,并且我们对机器人可移动的单元格进行了限定,我们从左至右和从上至下分别从小到大对坐标进行划分,如此我们便可以唯一确定每一个单元格,如图1所示。坐标除了用于记录位置信息外我们还需要它提供一些特殊的方法,例如CompareTo和Generate,这两个方法分别用于比较坐标和生成基于当前坐标指定方向的坐标,因此我们应该把它单独为一个类。
其次就是我们搜索机器人移动路径的主要方法了,可以先尝试模拟一下,我们从起始点出发,拥有四个可移动的方向,但是这就存在三个特殊情况,,所以我们需要对每个坐标进行判断,第一需要考虑这个坐标是否越界,第二需要考虑这个坐标是否受到移动限定值的影响,第三需要考虑这个坐标是否已经探索过,只有当以上三个情况均不满足的时候,才应该记录为允许移动的坐标。
如何将算法分析转换为代码,依旧是确定两个点,一是变量,二是逻辑主体,结合算法分析中的描述即可确定我们需要定义哪些变量以及逻辑主体是什么。
相关文章:
机器人的运动范围
声明 该系列文章仅仅展示个人的解题思路和分析过程,并非一定是优质题解,重要的是通过分析和解决问题能让我们逐渐熟练和成长,从新手到大佬离不开一个磨练的过程,加油! 原题链接 机器人的运动范围https://leetcode.c…...
学习笔记|基于Delay实现的LED闪烁|模块化编程|SOS求救灯光|STC32G单片机视频开发教程(冲哥)|第六集(下):实现LED闪烁
文章目录 2 函数的使用1.函数定义(需要带类型)2.函数声明(需要带类型)3.函数调用 3 新建文件,使用模块化编程新建xxx.c和xxx.h文件xxx.h格式:调用头文件验证代码调用:完整的文件结构如下&#x…...
微服务-Ribbon(负载均衡)
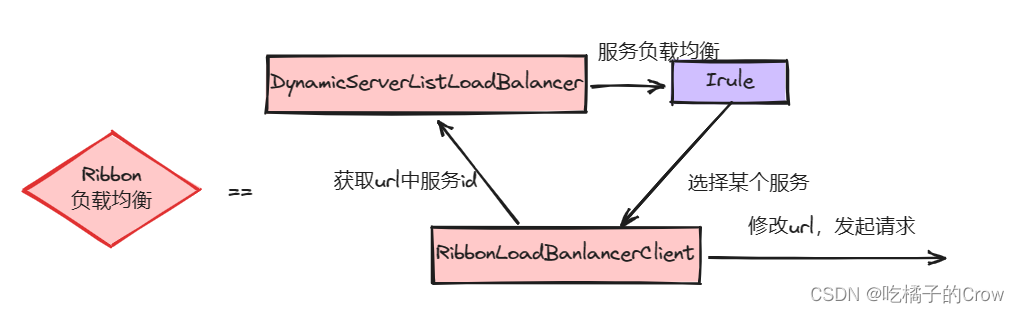
负载均衡的面对多个相同的服务的时候,我们选择一定的策略去选择一个服务进行 负载均衡流程 Ribbon结构组成 负载均衡策略 RoundRobinRule:简单的轮询服务列表来选择服务器AvailabilityFilteringRule 对两种情况服务器进行忽略: 1.在默认情…...
解决C#报“MSB3088 未能读取状态文件*.csprojAssemblyReference.cache“问题
今天在使用vscode软件C#插件,编译.cs文件时,发现如下warning: 图(1) C#报cache没有更新 出现该warning的原因:当前.cs文件修改了,但是其缓存文件*.csprojAssemblyReference.cache没有更新,需要重新清理一下工程&#x…...
GeoScene Pro在地图制图当中的应用
任何地理信息系统建设过程中,背景地图的展示效果对整个系统功能的实现没有直接影响;但是地图的好看与否,会间接的决定着整个项目的高度。 一幅精美的地图不仅能令人赏心悦目、眼前一亮,更能将人吸引到你的系统中,更愿意…...

国标混凝土结构设计规范的混凝土本构关系——基于python代码生成
文章目录 0. 背景1. 代码2. 结果测试 0. 背景 最近在梳理混凝土塔筒的计算指南,在求解弯矩曲率关系以及MN相关曲线时,需要混凝土的本构关系作为输入条件。 1. 代码 这段代码还是比较简单的。不过需要注意的是,我把受拉和受压两种状态统一了…...
)
系统架构设计-架构师之路(八)
软件架构概述 需求分析到软件设计之间的过渡过程就是软件架构。 需求分析人员整理成文档,但是开发人员对业务并不熟悉,这时候中间就需要一个即懂软件又懂业务的人,架构师来把文档整理成系统里的各个开发模块,布置开发任务。 软…...

【SA8295P 源码分析】25 - QNX Ethernet MAC 驱动 之 emac_isr_thread_handler 中断处理函数源码分析
【SA8295P 源码分析】25 - QNX Ethernet MAC 驱动 之 emac_isr_thread_handler 中断处理函数源码分析 一、emac 中断上半部:emac_isr()二、emac 中断下半部:emac_isr_thread_handler()2.1 emac 中断下半部:emac_isr_sw()系列文章汇总见:《【SA8295P 源码分析】00 - 系列文章…...

函数栈帧的创建与销毁
目录 引言 基础知识 内存模型 寄存器的种类与功能 常用的汇编指令 函数栈帧创建与销毁 main()函数栈帧的创建 NO1. NO2. NO3. NO4. NO5. NO6. main()函数栈帧变量的创建 调用Add()函数栈帧的预备工作——传参 NO1. NO2. NO3. Add()函数栈帧的创建 …...

工业安全生产平台在面粉行业的应用分享
一、背景介绍 面粉行业是一个传统的工业行业,安全生产问题一直备受关注。然而,由于生产过程中存在的各种安全隐患和风险,如粉尘爆炸、机械伤害等,使得面粉行业的安全生产形势依然严峻。为了解决这一问题,工业安全生产…...
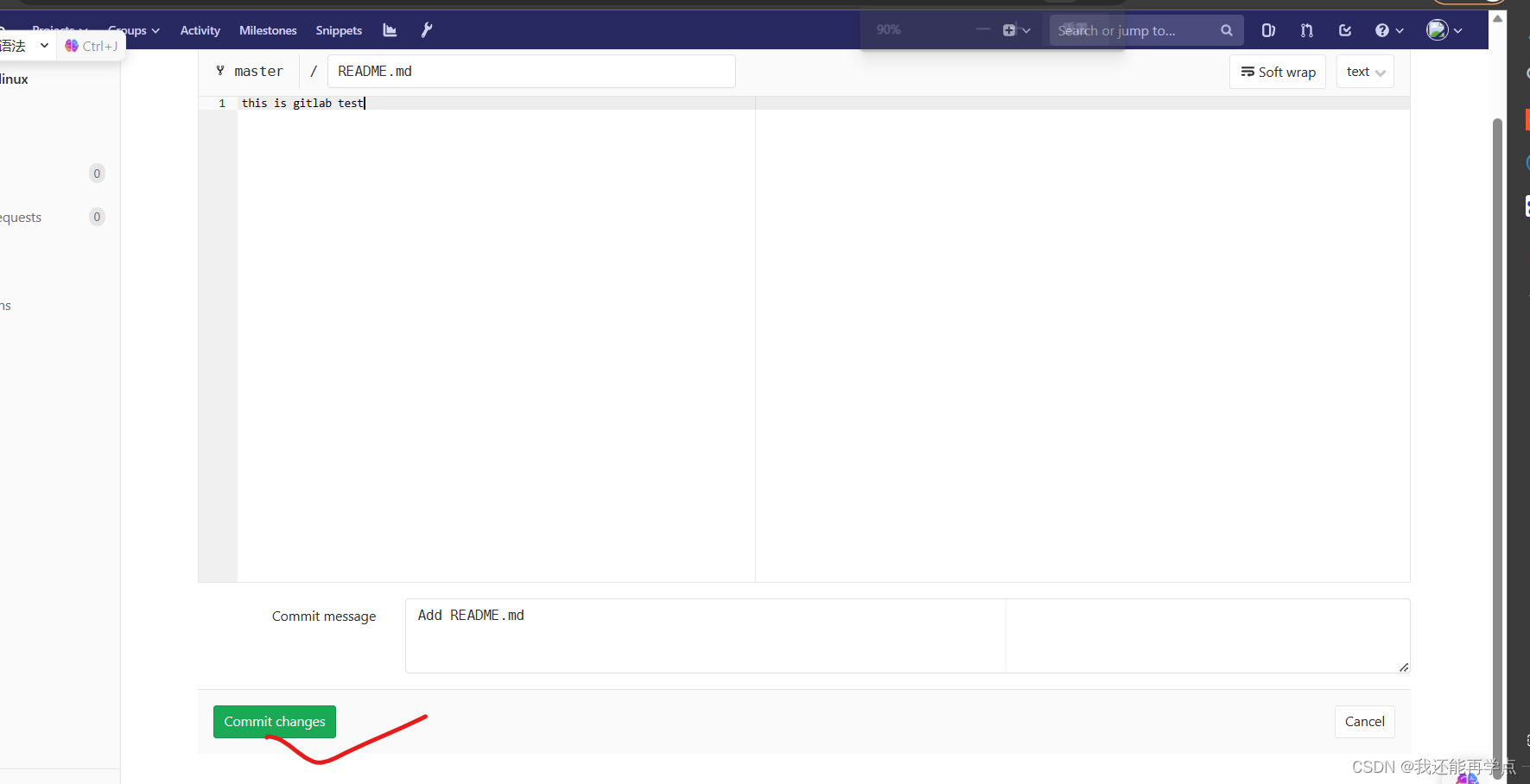
Gitlab服务部署及应用
目录 Gitlab简介 Gitlab工作原理 Gitlab服务构成 Gitlab环境部署 安装依赖包 启动postfix,并设置开机自启 设置防火墙 下载安装gitlab rpm包 修改配置文件/etc/gitlab/gitlab.rb,生产环境下可以根据需求修改 重新加载配置文件 浏览器登录Gitlab输…...
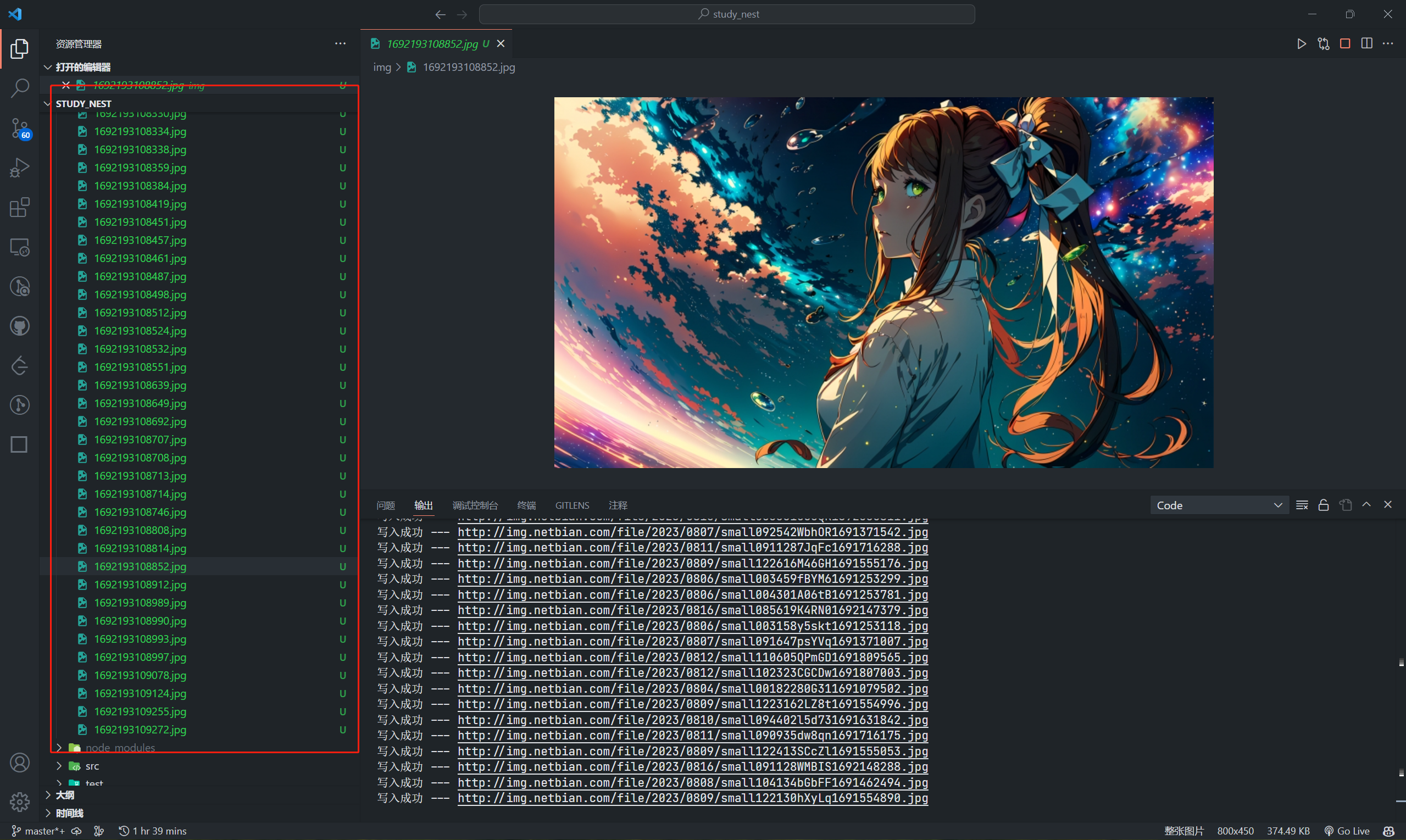
【nodejs】用Node.js实现简单的壁纸网站爬虫
1. 简介 在这个博客中,我们将学习如何使用Node.js编写一个简单的爬虫来从壁纸网站获取图片并将其下载到本地。我们将使用Axios和Cheerio库来处理HTTP请求和HTML解析。 2. 设置项目 首先,确保你已经安装了Node.js环境。然后,我们将创建一个…...

xlsx xlsx-style file-saver 导出json数据到excel文件并设置标题字体加粗
xlsx:用于处理Excel文件。xlsx-style:用于添加样式到Excel文件中。file-saver:用于将生成的Excel文件保存到用户的计算机上 npm install xlsx xlsx-style file-saver// 导入所需库 const XLSX require(xlsx); const XLSXStyle require(xls…...

Win11游戏高性能模式怎么开
1、点击桌面任务栏上的“开始”图标,在打开的应用中,点击“设置”; 2、“设置”窗口,左侧找到“游戏”选项,在右侧的选项中,找到并点击打开“游戏模式”; 3、打开的“游戏模式”中,找…...
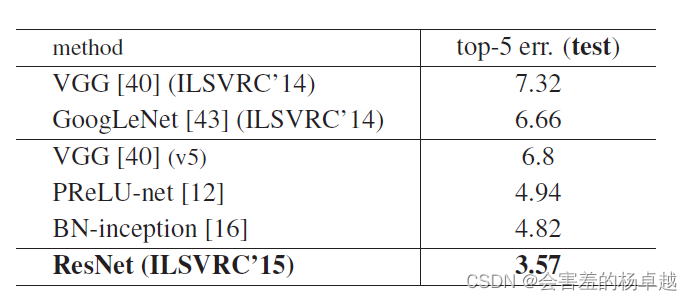
深度学习最强奠基作ResNet《Deep Residual Learning for Image Recognition》论文解读(上篇)
1、摘要 1.1 第一段 作者说深度神经网络是非常难以训练的,我们使用了一个残差学习框架的网络来使得训练非常深的网络比之前容易得很多。 把层作为一个残差学习函数相对于层输入的一个方法,而不是说跟之前一样的学习unreferenced functions 作者提供了…...

第22次CCF计算机软件能力认证
第一题:灰度直方图 解题思路: 哈希表即可 #include<iostream> #include<cstring>using namespace std;const int N 610; int a[N]; int n , m , l;int main() {memset(a , 0 , sizeof a);cin >> n >> m >> l;for(int …...

Go语言基础之基本数据类型
Go语言中有丰富的数据类型,除了基本的整型、浮点型、布尔型、字符串外,还有数组、切片、结构体、函数、map、通道(channel)等。Go 语言的基本类型和其他语言大同小异。 基本数据类型 整型 整型分为以下两个大类: 按…...

Linux Tracing Technologies
目录 1. Linux Tracing Technologies 1. Linux Tracing Technologies Linux Tracing TechnologieseBPFXDPDPDK...

iOS自定义下拉刷新控件
自定义下拉刷新控件 概述 用了很多的别人的下拉刷新控件,想写一个玩玩,自定义一个在使用的时候也会比较有意思。使应用更加的灵动一些,毕竟谁不喜欢各种动画恰到好处的应用呢。 使用方式如下: tableview.refreshControl XRef…...
Springboot写单元测试
导入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-test</artifactId><exclusions><exclusion><groupId>org.junit.vintage</groupId><artifactId>junit-vintag…...

避坑指南:ESP32-C3蓝牙通信中ESP_GATTS_READ_EVT事件的正确理解与数据更新时机
ESP32-C3蓝牙GATT通信中的数据更新陷阱与实战解决方案 当你在ESP32-C3上实现蓝牙GATT通信时,是否遇到过这样的困惑:明明在ESP_GATTS_READ_EVT事件中更新了特征值,但客户端读取到的却总是旧数据?这个看似简单的现象背后,…...
)
别再折腾Bootloader了!STM32H7内部Flash+QSPI Flash混合运行实战(MDK配置详解)
STM32H7混合存储架构开发实战:告别Bootloader的繁琐时代 在嵌入式开发领域,STM32H7系列凭借其高性能Cortex-M7内核和丰富的外设资源,已成为工业控制、智能设备和图形界面应用的宠儿。然而,传统开发模式中Bootloader与应用程序分离…...

终极指南:如何用React JSON Schema Form快速构建专业表单设计语言
终极指南:如何用React JSON Schema Form快速构建专业表单设计语言 【免费下载链接】react-jsonschema-form A React component for building Web forms from JSON Schema. 项目地址: https://gitcode.com/gh_mirrors/re/react-jsonschema-form React JSON Sc…...

第八部分-企业级实践——39. 私有镜像仓库
39. 私有镜像仓库 1. 私有镜像仓库概述 私有镜像仓库用于存储和管理企业内部 Docker 镜像,提供镜像存储、分发、安全扫描、访问控制等功能。 ┌────────────────────────────────────────────────────────…...

Vivado里FIFO IP核的Standard和FWFT模式到底怎么选?一个波形对比就懂了
Vivado中FIFO IP核模式选择:Standard与FWFT的深度解析与实战指南 在FPGA开发中,数据缓冲是几乎所有高速数据处理系统不可或缺的一环。作为Xilinx工具链中的核心IP之一,FIFO Generator提供了灵活的数据缓冲解决方案。但当面对Standard FIFO和F…...

ARM GICv3虚拟中断处理:GICV_IAR寄存器详解
1. GICV_IAR寄存器概述GICV_IAR(Virtual Machine Interrupt Acknowledge Register)是ARM GICv3架构中虚拟CPU接口的关键寄存器,主要用于虚拟机环境下的中断确认机制。当虚拟中断信号到达处理器时,通过读取该寄存器可以获取当前最高…...

番茄小说下载神器:3步轻松打造个人数字图书馆
番茄小说下载神器:3步轻松打造个人数字图书馆 【免费下载链接】Tomato-Novel-Downloader 番茄小说下载器不精简版 项目地址: https://gitcode.com/gh_mirrors/to/Tomato-Novel-Downloader 还在为找不到心仪的小说资源而烦恼吗?还在为阅读体验不佳…...

英特尔无人机芯片战略:从RealSense到异构计算的技术博弈与市场挑战
1. 从移动梦碎到天空野心:英特尔为何押注无人机芯片?2016年5月,当英特尔在加州棕榈泉的夜空中点亮100架编队飞行的无人机时,这场名为“Drone 100”的灯光秀,其意义远不止一场炫目的营销。它更像是一份宣言,…...

开源技术如何驱动物联网创新:从硬件到软件的平民化革命
1. 物联网与开源:一场全民工程的序章十年前,如果有人告诉我,一个没有任何电子工程背景的艺术家,能自己动手做一个能联网、能自动浇花、还能在社交媒体上发照片的智能花盆,我大概会觉得他在讲科幻故事。但今天ÿ…...

告别工具堆叠:2026 年智能运维的核心竞争力是数据一体化
在运维行业待得越久,越能感受到一个普遍的痛点:很多团队工具越买越多,效率却没跟上。你是不是也踩过类似的坑?装了 Zabbix、Prometheus、ELK,再配上一堆自研脚本和自动化工具,看起来功能齐全,实…...