速通蓝桥杯嵌入式省一教程:(七)定时器输入捕获中断与PWM频率占空比测量
前文已经讲述过定时器的两个用法:基本定时中断与PWM输出。本节接着介绍第三种用法:定时器输入捕获中断。
在此之前,需要解释一下前文一直出现过的与定时器有关的概念。
定时器(TIMER):所谓定时器,其基本功能就是定时,我们可以通过设置定时器的频率也就是周期,来帮助我们完成定时功能。
预分配系数(Prescaler):将时钟源的频率进行不同的分频,用于作为定时器的频率。若时钟源的频率为80MHz,预分频系数为80-1,那么得到的定时器频率就是80,000,000/80=1MHz,周期是1us。
计数周期(Counter Period):当定时器计数若干个周期以后,重置定时器的计数。假设计数周期设置为1000-1,那么当定时器完成1000个周期的计数后(按如上设置,也就是1ms后),定时器的计数值从999重置为0,重新开始计数。定时器中断的原理就是当计数值到达设定的计数周期后产生中断。计数周期又叫重装载值(AutoReload)。
比较值(Compare):在正脉冲输出模式下,若设置比较值为100,那么当计数值处于0~99时,端口输出高电平;当计数值处于100~999时,端口输出低电平,得到的效果就是前100us输出高电平,后900us输出低电平,产生一个频率为1kHz,占空比为10%的PWM波。在Cube中,比较值又称为Pulse。
在掌握了这几个概念之后,大家在阅读前几节时对定时器的疑问应该就可以尽数消除。这也就是定时器频率计算公式与PWM频率、占空比计算公式的由来。
所谓定时器输入捕获中断,就是将定时器的某个通道设置为直接输入捕获模式以后,将外部信号接到该通道所在引脚上,当外部信号满足一定条件(如边沿跳变)时,就会触发中断。因此,若我们设置在外部信号发生上升沿跳变时触发中断,在中断程序中读取定时器的计数值后手动将其清零,那么通过所得计数值,结合预先设置好的时钟源频率与预分频系数,就能通过公式计算得到输入信号的频率了。
下面我们就来看看如何测量输入到PA7引脚的信号频率。首先用Cube进行定时器的配置。

可见PA7引脚同时作为多个定时器的通道,在这里我们选择TIM3的CH2通道。

同样,为了提高测量频率的精度,我们将预分频系数设置得尽可能小,计数周期设置得尽可能大。随后,打开定时器中断开关。

这样,我们就完成了在Cube中的设置。
与定时器中断类似,在程序初始化时,需要先开启定时器输入捕获中断:
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_2); //开启TIM3CH2的输入捕获(IC(Input Capture))中断然后编写定时器输入捕获中断函数,同样要注意函数名和形参均不能改动!!!可参照下图查找:


uint16_t prescaler = 1-1;
uint32_t ccl_value;
uint32_t pa7_frq;void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) //定时器输入捕获回调函数
{if (htim->Instance==TIM3 && htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2) //TIM3CH2触发的中断{ccl_value = HAL_TIM_ReadCaptureValue(htim, TIM_CHANNEL_2); //读取捕获值(计数值)__HAL_TIM_SetCounter(&htim3, 0); //重置计数值pa7_frq = 80000000/((prescaler+1)*ccl_value); //根据公式计算频率HAL_TIM_IC_Start(htim, TIM_CHANNEL_2); //重新开启输入捕获}
}在这里,我们用到了HAL_TIM_ReadCaptrueValue来读取当前捕获的计数值,其定义如下:
/*** @brief Read the captured value from Capture Compare unit* @param htim TIM handle.* @param Channel TIM Channels to be enabled* This parameter can be one of the following values:* @arg TIM_CHANNEL_1: TIM Channel 1 selected* @arg TIM_CHANNEL_2: TIM Channel 2 selected* @arg TIM_CHANNEL_3: TIM Channel 3 selected* @arg TIM_CHANNEL_4: TIM Channel 4 selected* @retval Captured value*/
uint32_t HAL_TIM_ReadCapturedValue(TIM_HandleTypeDef *htim, uint32_t Channel)若要测量占空比,则需要在测量频率的基础上,使用另一个通道作为间接输入,并设置为下降沿捕获。这样一来,每当上升沿捕获中断触发,定时器计数清零后,到达第一个下降沿处,间接输入捕获通道捕获从上升沿到下降沿之间的计数值ccl_value_1;到达第二个上升沿处,直接输入捕获通道捕获从上升沿到上升沿之间的计数值ccl_value_2,于是占空比就等于ccl_value_1/ccl_value_2。
在这里我们选择Channel1作为间接输入捕获通道,在Cube中的设置如下:

更改代码如下:
uint16_t prescaler = 1-1;
uint32_t ccl_value_1, ccl_value_2;
uint32_t pa7_frq;
float pa7_duty;void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) //定时器输入捕获回调函数
{if (htim->Instance==TIM3 && htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2) //TIM3CH2触发的中断{ccl_value_1 = HAL_TIM_ReadCaptureValue(htim, TIM_CHANNEL_1); //间接ccl_value_2 = HAL_TIM_ReadCaptureValue(htim, TIM_CHANNEL_2); //直接__HAL_TIM_SetCounter(&htim3, 0); //重置计数值pa7_frq = 80000000/((prescaler+1)*ccl_value); //根据公式计算频率pa7_duty = float(ccl_value_1/ccl_value_2); //计算占空比HAL_TIM_IC_Start(htim, TIM_CHANNEL_1); //重新开启间接输入捕获HAL_TIM_IC_Start(htim, TIM_CHANNEL_2); //重新开启直接输入捕获}
}下面我们通过第十四届省赛题来总结本节所讲内容:
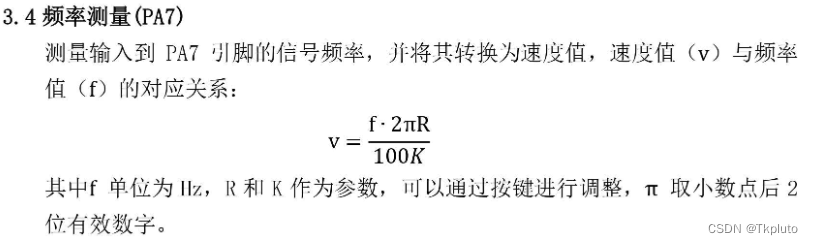
/* 以下代码添加到task.c中 */#define PI 3.14uint16_t prescaler = 1-1;
uint32_t ccl_value;
uint32_t pa7_frq;/* 测量频率 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{if (htim->Instance==TIM3 && htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2){ccl_value = HAL_TIM_ReadCaptureValue(htim, TIM_CHANNEL_2);__HAL_TIM_SetCounter(&htim3, 0);pa7_frq = 80000000/((prescaler+1)*ccl_value);V = (pa7_frq*2*PI*R)/(100*K);HAL_TIM_IC_Start(htim, TIM_CHANNEL_2);}
}
相关文章:
速通蓝桥杯嵌入式省一教程:(七)定时器输入捕获中断与PWM频率占空比测量
前文已经讲述过定时器的两个用法:基本定时中断与PWM输出。本节接着介绍第三种用法:定时器输入捕获中断。 在此之前,需要解释一下前文一直出现过的与定时器有关的概念。 定时器(TIMER):所谓定时器,其基本功能就是定时…...
深入理解python虚拟机:程序执行的载体——栈帧
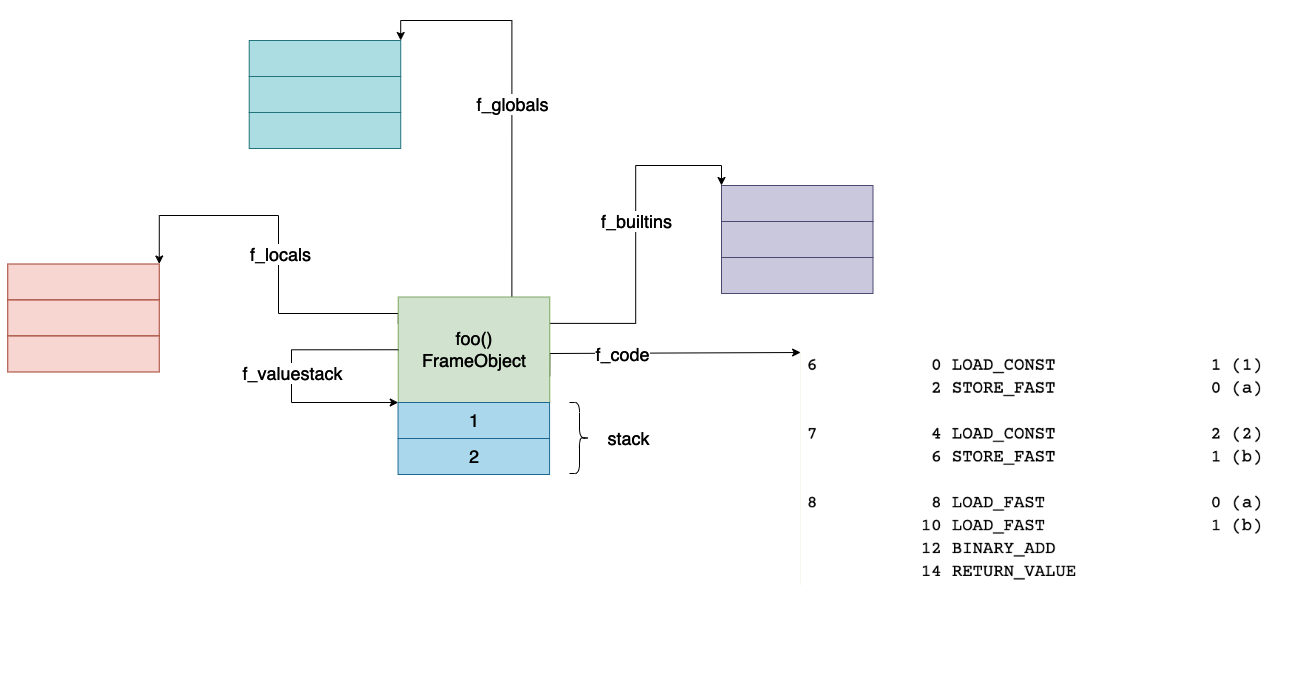
栈帧(Stack Frame)是 Python 虚拟机中程序执行的载体之一,也是 Python 中的一种执行上下文。每当 Python 执行一个函数或方法时,都会创建一个栈帧来表示当前的函数调用,并将其压入一个称为调用栈(Call Stac…...

云服务器-Docker容器-系统搭建部署
一、引言 最近公司在海外上云服务器,作者自己也搞了云服务器去搭建部署系统,方便了解整体架构和系统的生命周期,排查解决问题可以从原理侧进行分析实验。虽然用的云不是同一个,但是原理都是相通的。 二、选型 作者选用的是腾讯云…...

ES 索引重命名--Reindex(一)
ES reindex脚本流程,下图为整体流程: 步骤(1):每次写入把之前的索引删除再重新创建索引,然后判断索引是否创建成功,由于创建成功返回结果是json,因此用Json Input插件去解析json获得…...
Spring之bean的生命周期
目录 1.Bean的初始化过程 1.1代码详解 1.2思考 2.Bean的单例与多例选择 2.1论证单例与多例优缺点 2.2论证初始化时间点 2.3个例演示 Spring Bean的生命周期: 一、通过XML、Java annotation(注解)以及Java Configuration(配置类),等方式…...
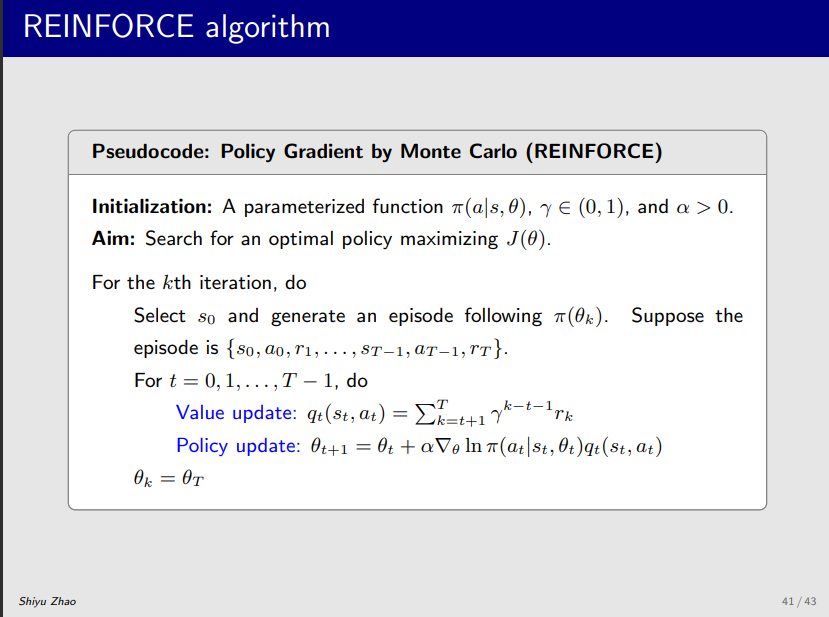
策略梯度方法
策略梯度方法 数学背景 给定一个标量函数 J ( θ ) J\left(\theta\right) J(θ),利用梯度上升法,使其最大化,此时的 π θ \pi_\theta πθ就是最优策略。 θ t 1 θ t α ∇ θ J ( θ t ) \theta_{t1}\theta_t\alpha \nabla_\theta…...

博客系统之单元测试
对博客系统进行单元测试 1、测试查找已存在的用户 测试名称 selectByUsernameTest01 测试源码 //查找用户,存在 Test public void selectByUsernameTest01 () { UserDao userDao new UserDao(); String ret1 userDao.selectByUsername("张三").toStr…...

【ARM v8】如何在ARM上实现x86的rdtsc()函数
博主未授权任何人或组织机构转载博主任何原创文章,感谢各位对原创的支持! 博主链接 本人就职于国际知名终端厂商,负责modem芯片研发。 在5G早期负责终端数据业务层、核心网相关的开发工作,目前牵头6G算力网络技术标准研究。 博客…...

redis--事务
redis事务 在Redis中,事务是一组原子性操作的集合,它们被一起执行,要么全部执行成功,要么全部回滚。虽然Redis的事务并不遵循传统数据库的ACID特性,但它仍然提供了一种将多个命令打包成一组执行的机制,适用…...

111. 二叉树的最小深度
111. 二叉树的最小深度 给定一个二叉树,找出其最小深度。 最小深度是从根节点到最近叶子节点的最短路径上的节点数量。 说明:叶子节点是指没有子节点的节点。 /*** Definition for a binary tree node.* struct TreeNode {* int val;* TreeN…...

SpringMVC归纳与总结
前言 Spring的核心是IOC,一种依赖反转的解耦思想。MVC是一种处理Web请求的架构模式,当两者的作用结合,就形成了SpringMVC。 组成及运行原理 1. 两次映射 2. 为什么用适配器模式 过滤器与拦截器 1. 范围 静态资源与动态资源2. 生命周期…...
_django知识(二))
Python学习笔记_进阶篇(三)_django知识(二)
本章内容 Django model Model 基础配置 django默认支持sqlite,mysql, oracle,postgresql数据库。 <1> sqlite django默认使用sqlite的数据库,默认自带sqlite的数据库驱动 引擎名称:django.db.backends.sqlite3 <2>mysql …...

RISC-V 整型通用寄存器介绍
简介 RISC-V64位/32位提供了32个整型通用寄存器,编号是x0~x31,这些整型通用寄存器的宽度与架构位数一致。 浮点数寄存器与整形寄存器一样也提供了32个:f0~f31,位数与架构位数一致。 通用寄存器介绍 零寄存器 x0/zero x0寄存…...

学习Vue:【性能优化】异步组件和懒加载
在Vue.js应用开发中,性能优化是一个至关重要的主题,而异步组件和懒加载是提升性能的有效方法之一。本文将介绍什么是异步组件和懒加载,以及如何在Vue.js中应用这些技术来提升应用性能。 异步组件和懒加载 异步组件 异步组件是指在需要的时候…...

pdf格式文件下载不预览,云存储的跨域解决
需求背景 后端接口中返回的是pdf文件路径比如: pdf文件路径 (https://wangzhendongsky.oss-cn-beijing.aliyuncs.com/wzd-test.pdf) 前端适配是这样的 <ahref"https://wangzhendongsky.oss-cn-beijing.aliyuncs.com/wzd-test.pdf&…...

httplib + nlohmann::json上传数据时中文乱码解决
1、nlohmann::json 1.1 编码格式使用UTF-8 参考 nlohmann::json 中文乱码解决方案 (1)将数据先转为UTF-8格式 2、httplib 2.1 上传数据前 (1)调用httplib::Response对象的set_header()方法来设置编码格式 httplib::Response res…...

JavaScript中的设计模式之一--单例模式和模块
虽然有一种疯狂天才的感觉可能很诱人,但重新发明轮子通常不是设计软件的最佳方法。很有可能有人已经遇到了和你一样的问题,并以一种聪明的方式解决了它。这样的最佳实践在形式化后被称为设计模式。今天我们来看看它们的概念,并检查单例模式和…...

回归预测 | MATLAB实现GAM广义加性模型多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现GAM广义加性模型多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现GAM广义加性模型多输入单输出回归预测(多指标,多图)效果一览基本介绍程序设计参考资料 效果一览 基本…...
css学习4(背景)
1、CSS中,颜色值通常以以下方式定义: 十六进制 - 如:"#ff0000"RGB - 如:"rgb(255,0,0)"颜色名称 - 如:"red" 2、background-image 属性描述了元素的背景图像. 默认情况下,背景图像进…...

二、SQL,如何实现表的创建和查询
1、新建表格(在当前数据库中新建一个表格): (1)基础语法: create table [表名]( [字段:列标签] [该列数据类型] comment [字段注释], [字段:列标签] [该列数据类型] comment [字段注释], ……,…...

AI搜索优化效果哪家好
传统行业获客越来越难,价格战打得头破血流,这是过去三年我听得最多的抱怨。但就在上个月,我用一个完全不同的方法,让公司的获客成本从单次300元降到了不到30元。秘密就在AI搜索优化,而这30天的实测,让我对市…...

期刊论文发表难破局:虎贲等考 AI 以真文献 + 强实证,大幅提升录用率
在职称评审、毕业要求、科研考核的多重压力下,期刊论文早已成为硬指标。可现实是:投稿容易录用难,初审因选题、文献、实证、格式任意一点不合格就被拒稿,返修反复消耗数月。通用 AI 只能堆砌文字、编造来源,普通工具仅…...

松下绿色科技战略:技术复用与协同效应如何驱动企业转型
1. 松下困局:消费电子巨头的十字路口2013年初的拉斯维加斯,消费电子展(CES)的喧嚣与霓虹之下,松下的时任社长津贺一宏站在聚光灯前,面对的却是一个冰冷而残酷的现实:公司预计将连续第二年录得高…...

Rails控制台集成AI助手:ask_chatgpt Gem的实践指南
1. 项目概述:在Rails控制台里装一个AI助手 如果你是一个Ruby on Rails开发者,并且每天都在跟Rails控制台( rails console )打交道,那你肯定有过这样的时刻:盯着一段复杂的ActiveRecord查询,或…...

Cortex-R52内存管理与实时性优化技术解析
1. Cortex-R52内存管理架构解析Cortex-R52作为Armv8-R架构的旗舰级实时处理器,其内存管理系统针对高可靠性场景进行了深度优化。与传统MMU不同,R52采用了增强型MPU(Memory Protection Unit)设计,通过16-24个可编程保护…...

AI应用开发平台RiserFlow实战:从架构解析到智能客服构建
1. 项目概述:从“RiserFlow”看现代AI应用开发范式的演进最近在GitHub上看到一个挺有意思的项目,叫riserlabs/riserflow。光看这个名字,可能有点摸不着头脑,但如果你点进去,会发现它其实指向一个更具体的产品ÿ…...
)
【仅开放72小时】:Gemini Workspace与Microsoft Entra ID双向同步的密钥轮换脚本(含自动审计日志生成器)
更多请点击: https://intelliparadigm.com 第一章:Gemini Workspace整合方案概述 Gemini Workspace 是 Google 推出的面向企业级 AI 协作的统一平台,其核心价值在于将 Gemini 模型能力深度嵌入办公套件(如 Gmail、Drive、Docs、M…...

MatrixFusion™矩阵视频融合,一路画面管全厂,彻底消除车间监控盲区
MatrixFusion™矩阵视频融合,一路画面管全厂,彻底消除车间监控盲区在智能制造全域可视化管控的落地实践中,工业车间因设备密集、产线交错、通道迂回、多区域分割的固有场景特性,成为监控体系搭建的核心难点。传统工业视频监控系统…...

Poppins字体终极指南:免费开源的多语言几何无衬线字体完全解析
Poppins字体终极指南:免费开源的多语言几何无衬线字体完全解析 【免费下载链接】Poppins Poppins, a Devanagari Latin family for Google Fonts. 项目地址: https://gitcode.com/gh_mirrors/po/Poppins 如果你正在寻找一款既现代又专业的免费字体ÿ…...

【DeepSeek开发者垂直搜索实战指南】:3大行业落地案例+5个避坑要点,限时公开内部调优参数
更多请点击: https://intelliparadigm.com 第一章:DeepSeek开发者垂直搜索应用案例全景概览 DeepSeek系列大模型凭借其开源、高性能与强推理能力,正被广泛集成至开发者垂直搜索场景中——从代码片段检索、API文档语义查找,到私有…...