PyTorch学习笔记(十六)——利用GPU训练
一、方式一
网络模型、损失函数、数据(包括输入、标注)
找到以上三种变量,调用它们的.cuda(),再返回即可
if torch.cuda.is_available():mynn = mynn.cuda()if torch.cuda.is_available():loss_function = loss_function.cuda()for data in train_dataloader:imgs,targets = dataif torch.cuda.is_available():imgs = imgs.cuda()targets = targets.cuda()for data in test_dataloader:imgs,targets = dataif torch.cuda.is_available():imgs = imgs.cuda()targets = targets.cuda()完整代码:
import torch
import torchvision
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
# from model import *# 准备数据集
train_data = torchvision.datasets.CIFAR10(root="../datasets",train=True,transform=torchvision.transforms.ToTensor(),download=False)
test_data = torchvision.datasets.CIFAR10(root="../datasets",train=False,transform=torchvision.transforms.ToTensor(),download=False)train_data_size = len(train_data)
test_data_size = len(test_data)
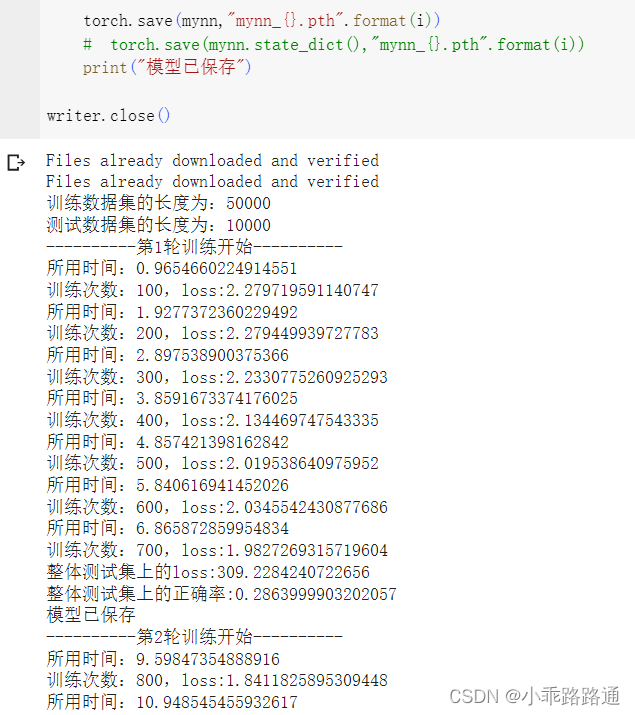
print("训练数据集的长度为:{}".format(train_data_size))
print("测试数据集的长度为:{}".format(test_data_size))# 利用dataloader来加载数据集
train_dataloader = DataLoader(train_data,batch_size=64)
test_dataloader = DataLoader(test_data,batch_size=64)# 创建网络模型
class MyNN(nn.Module):def __init__(self):super(MyNN, self).__init__()self.model = nn.Sequential(nn.Conv2d(3, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 64, 5, 1, 2),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(64 * 4 * 4, 64),nn.Linear(64, 10))def forward(self, x):x = self.model(x)return x
mynn = MyNN()
if torch.cuda.is_available():mynn = mynn.cuda()# 损失函数
loss_function = nn.CrossEntropyLoss()
if torch.cuda.is_available():loss_function = loss_function.cuda()
# 优化器
learning_rate = 1e-2
optimizer = torch.optim.SGD(mynn.parameters(), lr=learning_rate)# 设置训练网络的一些参数
total_train_step = 0 # 记录训练次数
total_test_step = 0 # 记录测试次数
epoch = 10 # 训练的轮数# 添加tensorboard
writer = SummaryWriter("../logs_train")start_time = time.time()
for i in range(epoch):print("----------第{}轮训练开始----------".format(i+1))# 训练步骤开始mynn.train()for data in train_dataloader:imgs,targets = dataif torch.cuda.is_available():imgs = imgs.cuda()targets = targets.cuda()outputs = mynn(imgs)loss = loss_function(outputs, targets)# 优化器优化模型optimizer.zero_grad()loss.backward()optimizer.step()total_train_step += 1if total_train_step % 100 == 0:end_time = time.time()print("所用时间:{}".format(end_time - start_time))print("训练次数:{},loss:{}".format(total_train_step, loss.item()))writer.add_scalar("train_loss",loss.item(),total_train_step)# 测试步骤开始mynn.eval()total_test_loss = 0total_accuracy = 0with torch.no_grad():for data in test_dataloader:imgs,targets = dataif torch.cuda.is_available():imgs = imgs.cuda()targets = targets.cuda()outputs = mynn(imgs)loss = loss_function(outputs, targets)total_test_loss += lossaccuracy = (outputs.argmax(1) == targets).sum()total_accuracy += accuracyprint("整体测试集上的loss:{}".format(total_test_loss))print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))writer.add_scalar("test_loss",total_test_loss,total_test_step)writer.add_scalar("test_accuracy",total_accuracy/test_data_size,total_test_step)total_test_step += 1torch.save(mynn,"mynn_{}.pth".format(i))# torch.save(mynn.state_dict(),"mynn_{}.pth".format(i))print("模型已保存")writer.close()比较CPU和GPU的训练时间:


查看GPU信息:
在 终端里输入nvidia-smi
使用Google Colab:Google 为我们提供了一个免费的GPU
修改 ——> 笔记本设置 ——> 硬件加速器选择GPU(每周免费使用30h)

二、方式二(更常用)
定义训练设备
device = torch.device("cpu")# 对于单显卡来说,以下两种方式没有区别
device = torch.device("cuda")
device = torch.device("cuda:0")# 一种语法的简写,程序在 CPU 或 GPU/cuda 环境下都能运行
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")网络模型、损失函数、数据(包括输入、标注)
找到以上三种变量,.to(device),再返回即可
mynn = MyNN()
mynn = mynn.to(device)
# 这里可以不用再赋值给mynn,直接mynn.to(device) 也可以loss_function = nn.CrossEntropyLoss()
loss_function = loss_function.to(device)
# 这里可以不用再赋值给loss_function ,直接loss_function .to(device) 也可以for data in train_dataloader:imgs,targets = dataimgs = imgs.to(device)targets = targets.to(device)# 这里必须赋值for data in test_dataloader:imgs,targets = dataimgs = imgs.to(device)targets = imgs.to(device)# 这里必须赋值完整代码:
import torch
import torchvision
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
# from model import *# 定义训练的设备
# device = torch.device("cpu")
# device = torch.device("cuda")
# device = torch.device("cuda:0")
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")# 准备数据集
train_data = torchvision.datasets.CIFAR10(root="../datasets",train=True,transform=torchvision.transforms.ToTensor(),download=False)
test_data = torchvision.datasets.CIFAR10(root="../datasets",train=False,transform=torchvision.transforms.ToTensor(),download=False)train_data_size = len(train_data)
test_data_size = len(test_data)
print("训练数据集的长度为:{}".format(train_data_size))
print("测试数据集的长度为:{}".format(test_data_size))# 利用dataloader来加载数据集
train_dataloader = DataLoader(train_data,batch_size=64)
test_dataloader = DataLoader(test_data,batch_size=64)# 创建网络模型
class MyNN(nn.Module):def __init__(self):super(MyNN, self).__init__()self.model = nn.Sequential(nn.Conv2d(3, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 64, 5, 1, 2),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(64 * 4 * 4, 64),nn.Linear(64, 10))def forward(self, x):x = self.model(x)return x
mynn = MyNN()
mynn.to(device)# 损失函数
loss_function = nn.CrossEntropyLoss()
loss_function.to(device)
# 优化器
learning_rate = 1e-2
optimizer = torch.optim.SGD(mynn.parameters(), lr=learning_rate)# 设置训练网络的一些参数
total_train_step = 0 # 记录训练次数
total_test_step = 0 # 记录测试次数
epoch = 10 # 训练的轮数# 添加tensorboard
writer = SummaryWriter("../logs_train")start_time = time.time()
for i in range(epoch):print("----------第{}轮训练开始----------".format(i+1))# 训练步骤开始mynn.train()for data in train_dataloader:imgs,targets = dataimgs = imgs.to(device)targets = targets.to(device)outputs = mynn(imgs)loss = loss_function(outputs, targets)# 优化器优化模型optimizer.zero_grad()loss.backward()optimizer.step()total_train_step += 1if total_train_step % 100 == 0:end_time = time.time()print("所用时间:{}".format(end_time - start_time))print("训练次数:{},loss:{}".format(total_train_step, loss.item()))writer.add_scalar("train_loss",loss.item(),total_train_step)# 测试步骤开始mynn.eval()total_test_loss = 0total_accuracy = 0with torch.no_grad():for data in test_dataloader:imgs,targets = dataimgs = imgs.to(device)targets = targets.to(device)outputs = mynn(imgs)loss = loss_function(outputs, targets)total_test_loss += lossaccuracy = (outputs.argmax(1) == targets).sum()total_accuracy += accuracyprint("整体测试集上的loss:{}".format(total_test_loss))print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))writer.add_scalar("test_loss",total_test_loss,total_test_step)writer.add_scalar("test_accuracy",total_accuracy/test_data_size,total_test_step)total_test_step += 1torch.save(mynn,"mynn_{}.pth".format(i))# torch.save(mynn.state_dict(),"mynn_{}.pth".format(i))print("模型已保存")writer.close()相关文章:
PyTorch学习笔记(十六)——利用GPU训练
一、方式一 网络模型、损失函数、数据(包括输入、标注) 找到以上三种变量,调用它们的.cuda(),再返回即可 if torch.cuda.is_available():mynn mynn.cuda() if torch.cuda.is_available():loss_function loss_function.cuda(…...

【实战】十一、看板页面及任务组页面开发(三) —— React17+React Hook+TS4 最佳实践,仿 Jira 企业级项目(二十五)
文章目录 一、项目起航:项目初始化与配置二、React 与 Hook 应用:实现项目列表三、TS 应用:JS神助攻 - 强类型四、JWT、用户认证与异步请求五、CSS 其实很简单 - 用 CSS-in-JS 添加样式六、用户体验优化 - 加载中和错误状态处理七、Hook&…...

金额千位符自定义指令
自定义指令文件 moneyFormat.js /*** v-money 金额千分位转换*/export default {inserted: inputFormatter({// 格式化函数formatter(num, util) {if(num null || num || num undefined || typeof(num) undefined){return }if(util 万元 || util 万){return formatMone…...

请不要用 JSON 作为配置文件,使用JSON做配置文件的缺点
我最近关注到有的项目使用JSON作为配置文件。我觉得这不是个好主意。 这不是JSON的设计目的,因此也不是它擅长的。JSON旨在成为一种“轻量级数据交换格式”,并声称它“易于人类读写”和“易于机器解析和生成”。 作为一种数据交换格式,JSON是…...
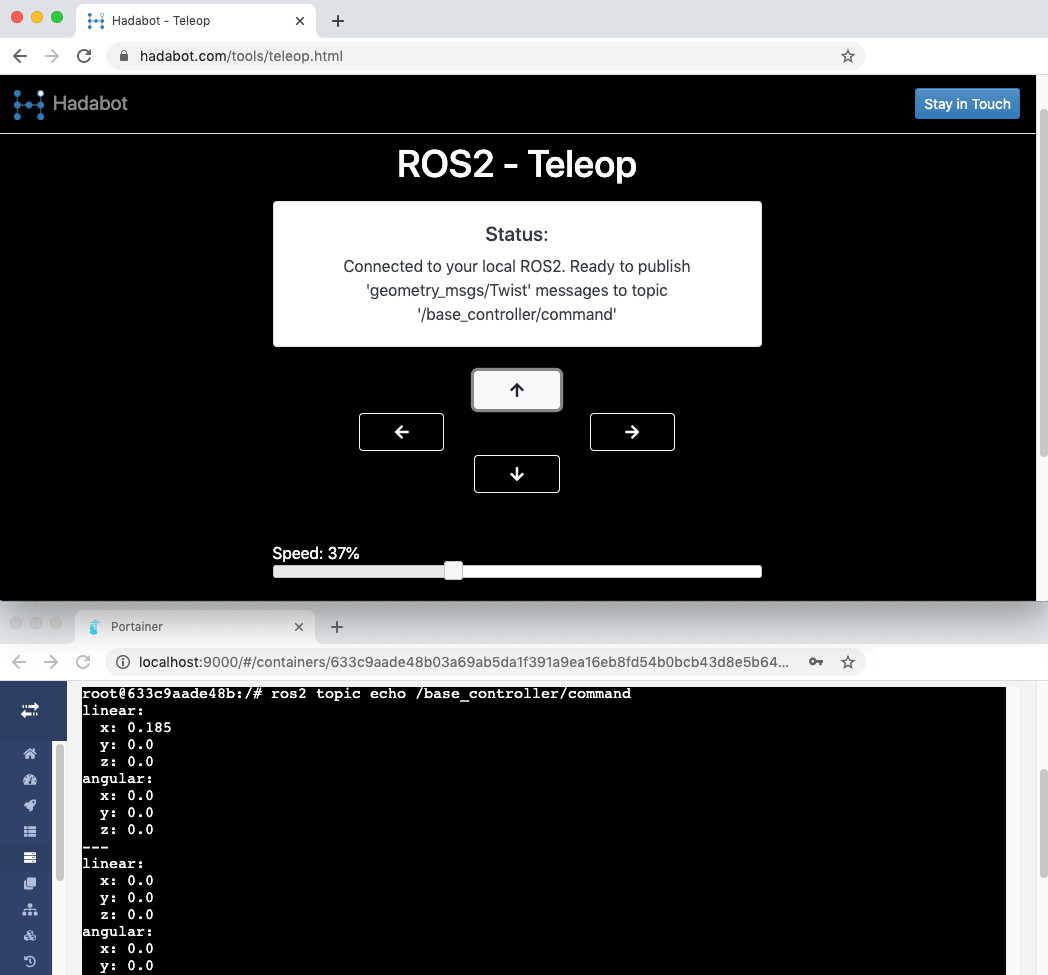
Hadabot:从网络浏览器操作 ROS2 远程控制器
一、说明 Hadabot Hadabot是一个学习ROS2和机器人技术的机器人套件。使用 Hadabot,您将能够以最小的挫败感和恐吓来构建和编程物理 ROS2 机器人。Hadabot套件目前正在开发中。它将仅针对ROS2功能,并强调基于Web的用户界面。 随着开发的进展&a…...

Kotlin 协程
Kotlin 协程(Coroutines)是一种轻量级的并发编程解决方案,旨在简化异步操作和多线程编程。它提供了一种顺序和非阻塞的方式来处理并发任务,使得代码可以更加简洁和易于理解。Kotlin 协程通过提供一套高级 API,使并发代…...
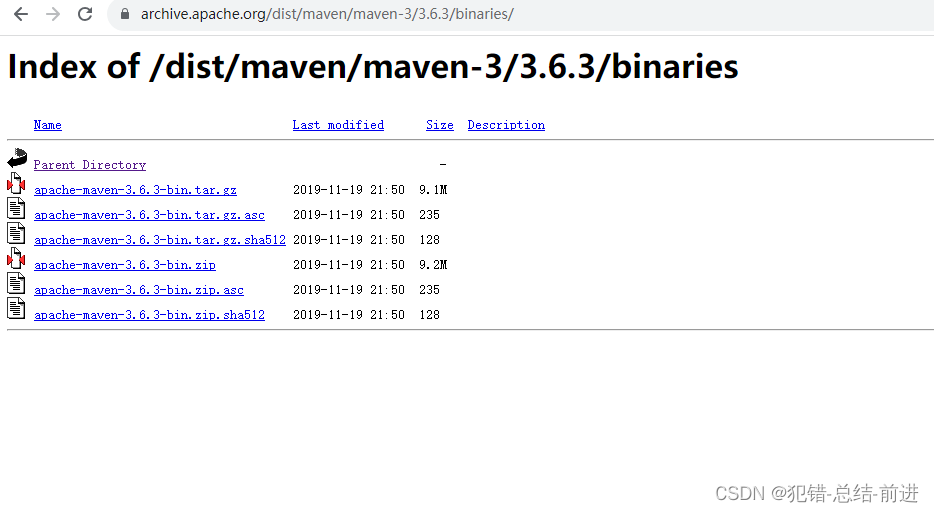
maven 从官网下载指定版本
1. 进入官网下载页面 Maven – Download Apache Maven 点击下图所示链接 2. 进入文件页,选择需要的版本 3. 选binaries 4. 选文件,下载即可...

数据结构---串(赋值,求子串,比较,定位)
目录 一.初始化 顺序表中串的存储 串的链式存储 二.赋值操作:将str赋值给S 链式表 顺序表 三.复制操作:将chars复制到str中 链式表 顺序表 四.判空操作 链式表 顺序表 五.清空操作 六.串联结 链式表 顺序表 七.求子串 链式表 顺序表…...
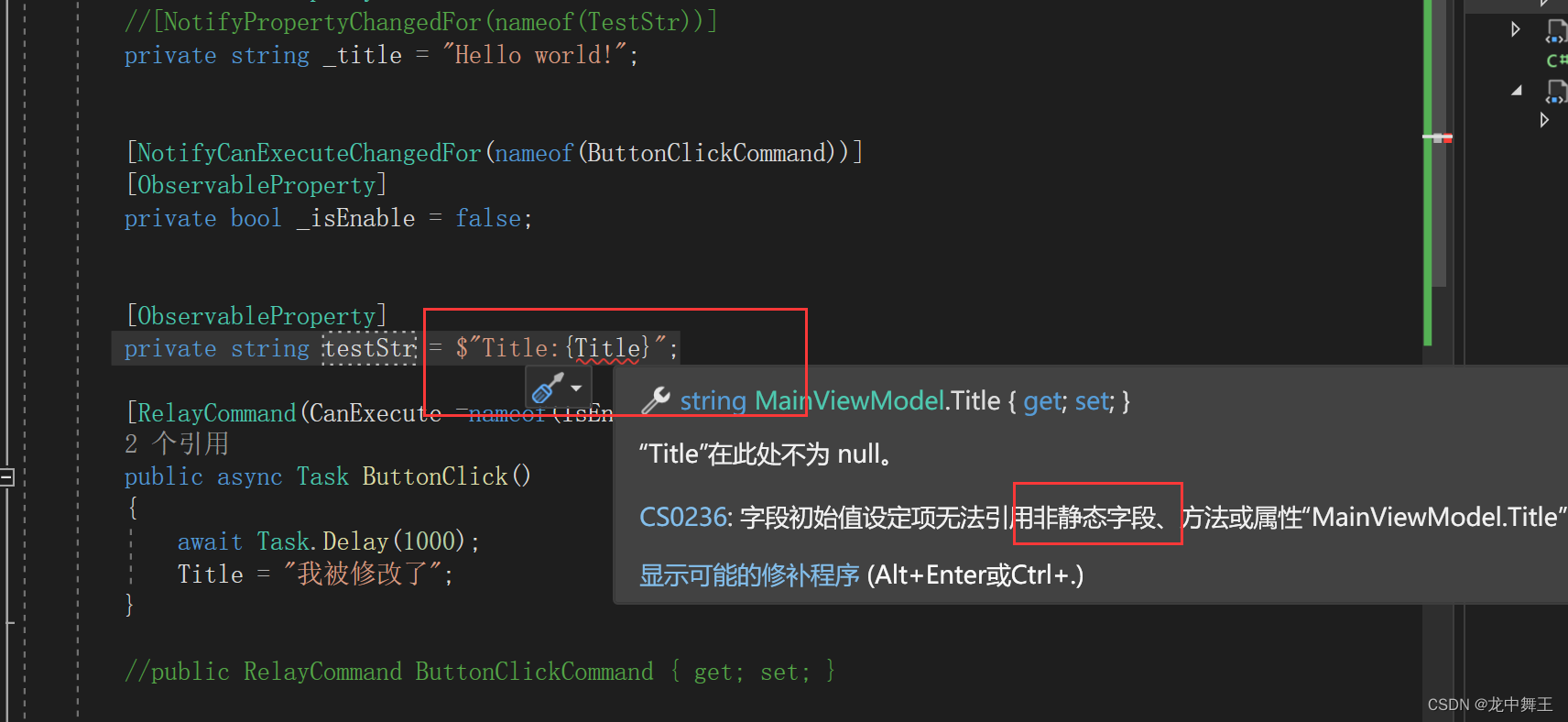
WPF CommunityToolkit.Mvvm
文章目录 前言ToolkitNuget安装简单使用SetProperty,通知更新RealyCommandCanExecute 新功能,代码生成器ObservablePropertyNotifyCanExecuteChangedForRelayCommand其他功能对应关系 NotifyPropertyChangedFor 前言 CommunityToolkit.Mvvm(…...

Vue开发中如何解决国际化语言切换问题
Vue开发中如何解决国际化语言切换问题 引言: 在如今的全球化时代,应用程序的国际化变得越来越重要。为了让不同地区的用户能够更好地使用应用程序,我们需要对内容进行本地化,以适应不同语言和文化环境。对于使用Vue进行开发的应用…...

基于springboot+vue的流动人口登记系统(前后端分离)
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战 主要内容:毕业设计(Javaweb项目|小程序等)、简历模板、学习资料、面试题库、技术咨询 文末联系获取 项目介绍…...
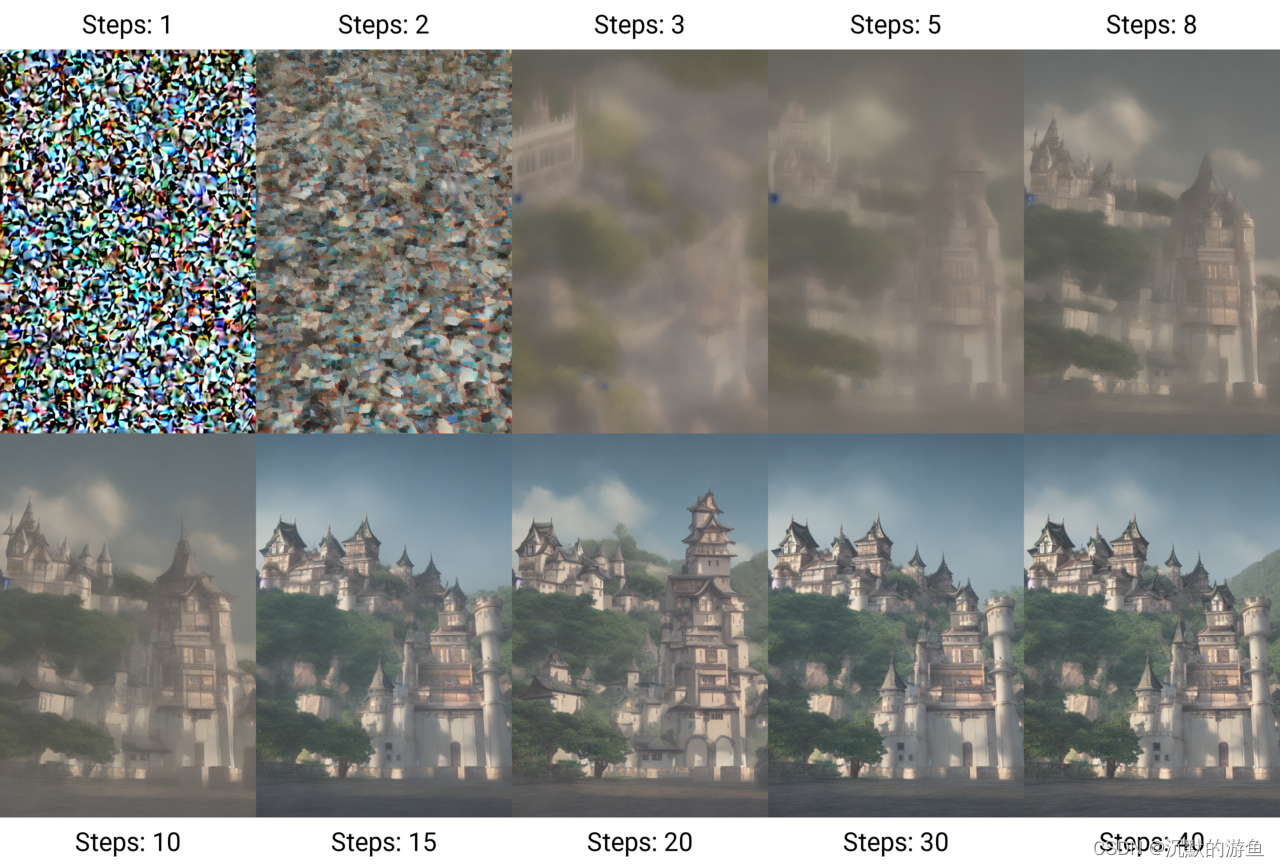
Stable Diffusion的使用以及各种资源
Stable Diffsuion资源目录 SD简述sd安装模型下载关键词,描述语句插件管理controlNet自己训练模型 SD简述 Stable Diffusion是2022年发布的深度学习文本到图像生成模型。它主要用于根据文本的描述产生详细图像,尽管它也可以应用于其他任务,如…...

Redis 分布式锁的实现方式
一般来说,在对数据进行“加锁”时,程序首先需要通过获取(acquire)锁来得到对数据排他性访问的能力,然后才能对数据执行一系列操作,最后还要将锁释放(release)给其他程序。 对于能够…...

VMware上搭建的虚拟机突然本地无法连接服务器
长时间没有使用VMware 虚拟机了,今天突然登录上去,启动虚拟服务器后发现本地等不了了, 经过排查发现是开启了:VirtualBox Host-Only Network 关闭之后就本机就可以直连服务器了...

JDBC回顾
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 JDBC回顾 前言一、JDBC1.JDBC是什么?2.如何使用?(1)注册驱动(2)获取连接(3)操作…...

mq 消息队列 mqtt emqx ActiveMQ RabbitMQ RocketMQ
省流: 十几年前,淘宝的notify,借鉴ActiveMQ。京东的ActiveMQ集群几百台,后面改成JMQ。 Linkedin的kafka,因为是scala,国内很多人不熟。淘宝的人把kafka用java写了一遍,取名metaq,后…...

沃尔玛卖家必看!解决订单被Kan、Feng号问题的终极方案!
近期有很多沃尔玛卖家和工作室联系到我提到说在沃尔玛平台上下单,买家号出现副款义常订单被k掉,是什么原因、我们该如何去解决呢? 以下是一些可能导至你的测评订单被k单的原因: 1.技术问题:有时,网站或系…...
浅谈日常使用的 Docker 底层原理-三大底座
适合的读者,对Docker有过简单了解的朋友,想要进一步了解Docker容器的朋友。 前言 回想我这两年,一直都是在使用 Docker,看过的视频、拜读过的博客,大都是在介绍 Docker 的由来、使用、优点和发展趋势,但对…...

前端面试:【DOM】编织网页的魔法
嘿,亲爱的代码魔法师!在JavaScript的奇幻世界里,有一项强大的技能,那就是DOM操作。DOM(文档对象模型)操作允许你选择、修改和创建网页元素,就像是在编织一个魔法的网页。 1. 什么是DOMÿ…...
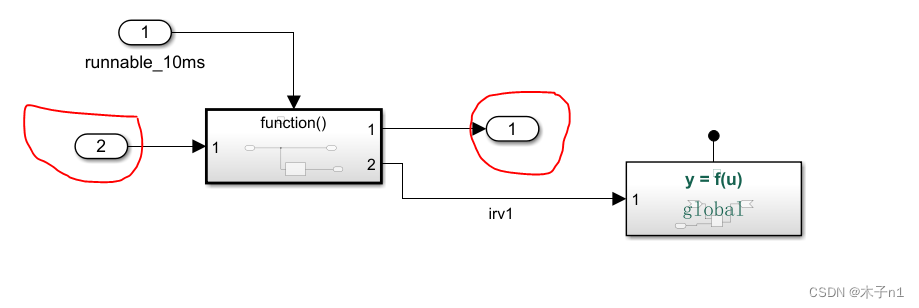
基于MATLAB开发AUTOSAR软件应用层Code mapping专题-part 2 Inport和Outports 标签页介绍
上篇我们介绍了Function页的内容,这篇我们介绍Inports和Outports页的内容,这里我们再次强调一个概念,code mapping是以simulink的角度去看的,就是先要在模型中建立simulink模块,在code mapping里映射他要对应的autosar的元素,之后生成代码时的c语言的名字是以Autosar的元…...

新手友好:通过快马生成带详解的nodepad项目轻松入门Web开发
作为一个刚接触Web开发的新手,想要自己动手实现一个简易的文本编辑器(nodepad)可能会觉得无从下手。最近我在InsCode(快马)平台上尝试了这个项目,发现整个过程比我预想的要简单很多,特别适合像我这样的初学者来理解Web开发的基本流程。 项目结…...

在Windows上用C++部署YOLO11模型:从PyTorch训练到QT桌面应用的全流程避坑指南
工业级YOLO11模型C部署实战:从PyTorch到QT6.9的工程化落地指南 当Python训练的AI模型需要真正投入生产线时,C部署往往成为必经之路。去年在为某电子元件制造商部署电容极性检测系统时,我深刻体会到从Jupyter Notebook到稳定运行的Windows桌面…...

DDPG与TD3算法训练中tanh饱和区导致的边界值问题分析与调优
1. 为什么DDPG/TD3会卡在动作边界值? 第一次用DDPG训练机械臂控制任务时,我盯着监控曲线看了整整三天——那个该死的关节角度永远卡在30度的极限位置。后来换成TD3算法,发现同样会陷入这个怪圈。这就像新手司机开车总把方向盘打死,…...
)
别再为XCode证书头疼了!Unity打包iOS App的保姆级避坑指南(含iOSDeviceSupport下载)
Unity打包iOS应用终极避坑手册:从Xcode证书到真机调试全链路解决方案 每次看到Unity打包iOS时Xcode弹出的红色错误提示,是不是感觉血压瞬间飙升?作为经历过上百次打包踩坑的老司机,我决定把那些官方文档从不提及的"隐藏关卡&…...

tinyECC:Arduino嵌入式平台的轻量级ECC密码库
1. tinyECC 库概述:面向 Arduino 微控制器的轻量级椭圆曲线密码学实现tinyECC 是一个专为资源受限的 Arduino 微控制器平台设计的嵌入式椭圆曲线密码学(Elliptic Curve Cryptography, ECC)库。其核心目标是在仅有几 KB RAM 和数十 KB Flash 的…...

深度学习训练不再难:环境镜像帮你搞定所有依赖,专注代码开发
深度学习训练不再难:环境镜像帮你搞定所有依赖,专注代码开发 1. 镜像环境概述 深度学习项目开发中最令人头疼的问题之一就是环境配置。不同框架版本、CUDA版本、Python版本之间的兼容性问题常常让开发者陷入"依赖地狱"。本镜像正是为解决这一…...
)
新手必看:5分钟学会用Visio绘制PAD图和N-S图(附实例解析)
零基础掌握Visio绘制PAD图与N-S图的实战指南 在软件设计领域,可视化工具的重要性不言而喻。对于刚入门的开发者来说,掌握如何将抽象的逻辑思维转化为直观的图表是一项必备技能。Visio作为微软旗下的专业绘图工具,以其友好的界面和强大的功能&…...

钉钉H5应用PDF预览避坑指南:为什么iframe直接跳转下载页?
钉钉H5应用PDF预览技术解析:从安全策略到实战解决方案 每次在钉钉H5应用中尝试用iframe嵌套PDF时,那个突如其来的下载对话框总让人措手不及。这背后隐藏的不仅是技术限制,更是一场安全与用户体验的博弈。作为企业内部应用开发者,我…...

3个AI工具如何提升动态图像质量?专业级画质增强全攻略
3个AI工具如何提升动态图像质量?专业级画质增强全攻略 【免费下载链接】video2x A lossless video/GIF/image upscaler achieved with waifu2x, Anime4K, SRMD and RealSR. Started in Hack the Valley II, 2018. 项目地址: https://gitcode.com/GitHub_Trending/…...

小白也能懂!CosyVoice2-0.5B API调用全攻略,快速生成克隆语音
小白也能懂!CosyVoice2-0.5B API调用全攻略,快速生成克隆语音 1. 准备工作:认识CosyVoice2-0.5B CosyVoice2-0.5B是阿里开源的一款强大的语音克隆工具,它能让你用短短3-10秒的参考音频,就能克隆出几乎一模一样的声音…...