STM32模拟SPI协议获取24位模数转换(24bit ADC)芯片AD7791电压采样数据
STM32模拟SPI协议获取24位模数转换(24bit ADC)芯片AD7791电压采样数据
STM32大部分芯片只有12位的ADC采样性能,如果要实现更高精度的模数转换如24位ADC采样,则需要连接外部ADC实现。AD7791是亚德诺(ADI)半导体一款用于低功耗、24位Σ-Δ型模数转换器(ADC) ,适合低频测量应用,提供50 Hz/60 Hz同步抑制。
这里介绍基于AD7791的24位ADC采样实现。
AD7791控制协议
AD7791的管脚如下所示:
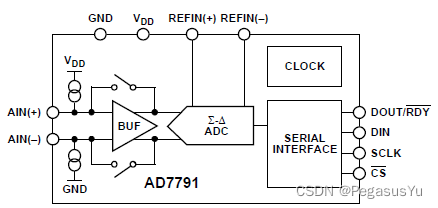
AD7791可以工作在2.5V~5.25V供电范围(VDD),而用于模数转换的参考电压可以通过引脚REFIN(+)和REFIN(–)单独设置,从而可以针对特定电压范围更高精度的采样。如果REFIN(+) - REFIN(–) = 1V, 则对应24位采样分辨率率为1/(2^24)=0.00000006V。当然要使得这个级别的电压分辨率有效,对电路噪声的控制要求也很高。
AIN(+)和AIN(-)用于连接输入信号,通过芯片内部寄存器配置,有两种转换模式,即AIN(+)相对AIN(-)是单边电压或双边电压。单边电压模式,采样值0x000000对应AIN(+)-AIN(-)=0,采样值0xFFFFFF对应AIN(+)-AIN(-)=REFIN(+) - REFIN(–) 。双边电压模式,采样值0x000000对应AIN(+)-AIN(-)=-(REFIN(+) - REFIN(–)),采样值0x800000对应AIN(+)-AIN(-)=0,采样值0xFFFFFF对应AIN(+)-AIN(-)=REFIN(+) - REFIN(–) 。
AD7791通过SPI总线进行访问控制,其中数据输出管脚DOUT也是转换完成可读取指示信号/RDY, 访问协议操作主要逻辑如下:
- 向通讯寄存器发送指令,设置采样的通道和读操作模式(单次或连续),并且设置下一次访问是对哪个寄存器进行操作,以及进行的是读还是写;
- 写模式寄存器,设置采用单次转换还是连续转换模式,单边还是双边转换模式,以及是否buffered模式(buffered模式对应信号接收管脚端接收阻抗高阻模式),以及buffered模式是否在输入端引用100ns电流源;
- 在配置模式寄存器后,可以再向通讯寄存器发送指令指示后续读取数据寄存器,然后按照24位格式读取采样到的ADC值;
- 芯片支持对供电电压的采样识别,原理为供电电压内部LDO降压到1.17V作为VDD采样电路的参考供电,而VDD本身分压到1/5接到ADC采样端。所以供电电压识别为(VDD采样值/16777216)1.175 V.
- 可配置滤波寄存器以控制采样转换输出频率,影响到噪声抑制级别;
- 可以读取状态寄存器获得一些状态信息。
STM32工程配置
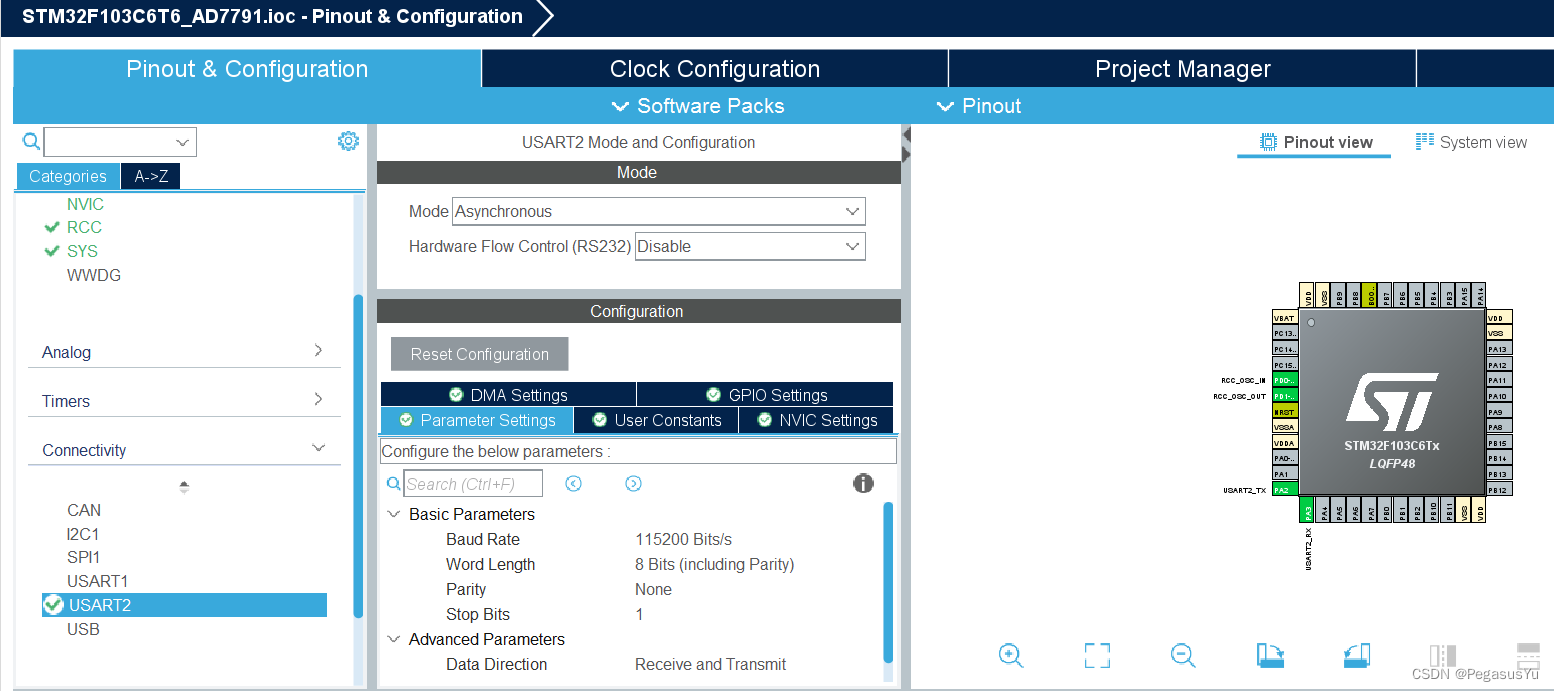
这里以STM32F103C6T6及STM32CUBEIDE开发工具为例,介绍AD7791的24位ADC采样实现。
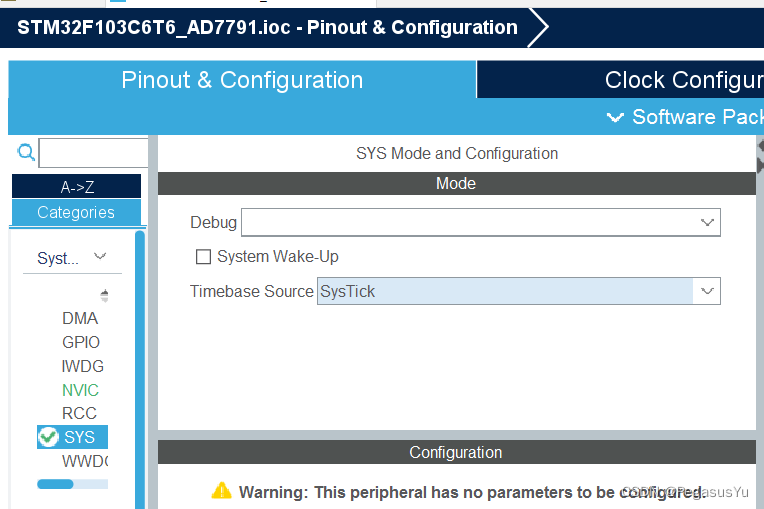
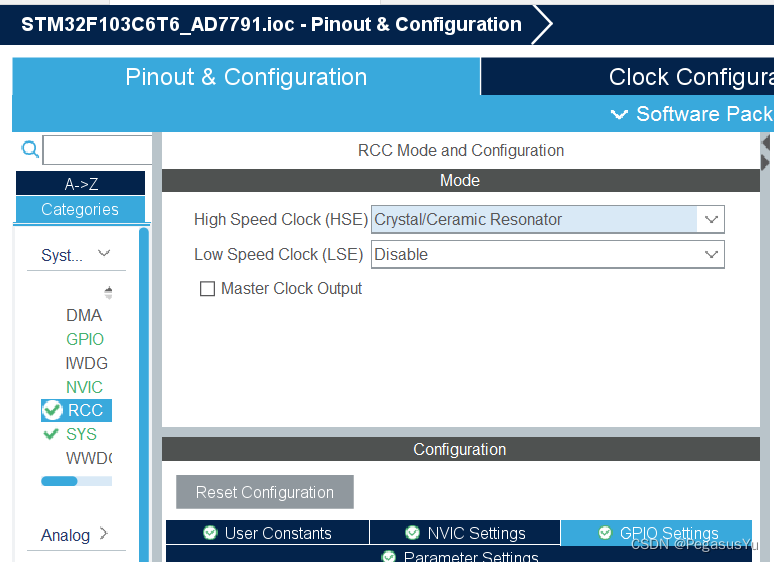
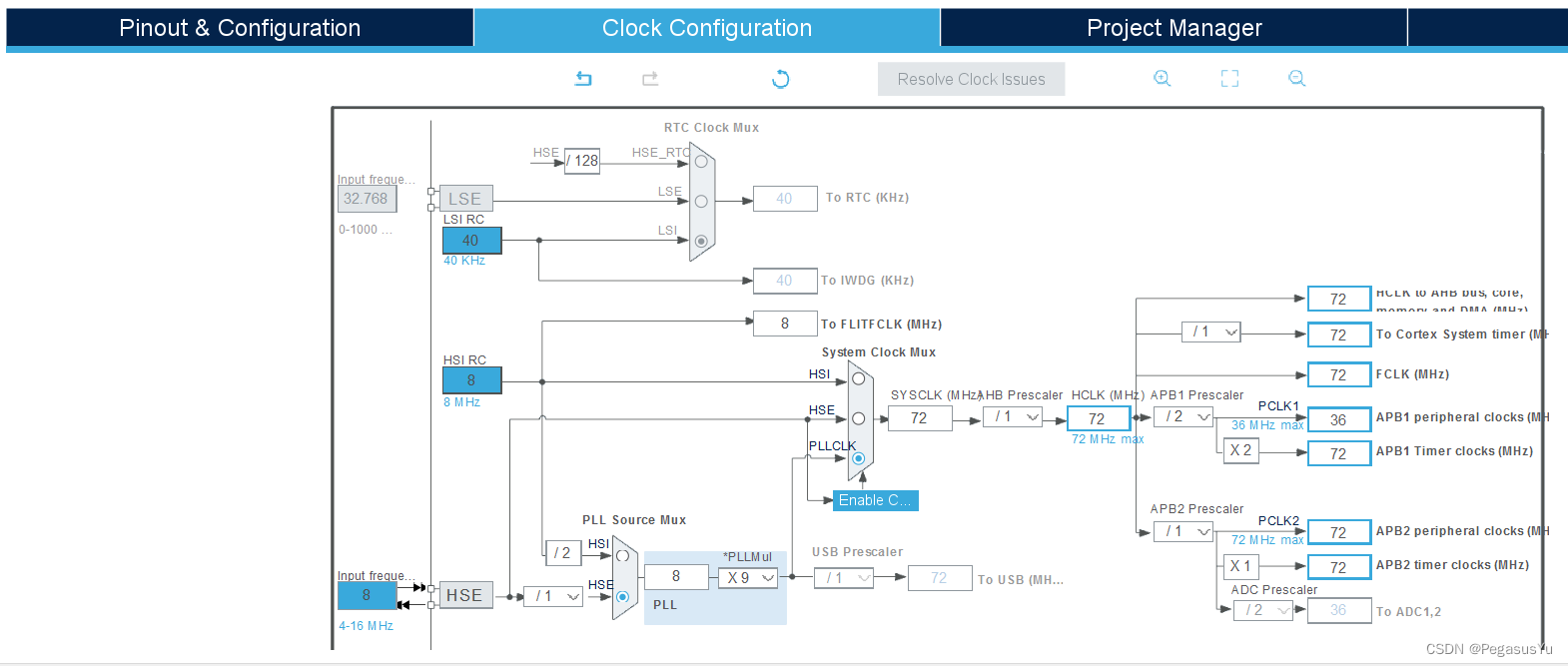
首先建立基本工程并配置时钟:
配置一个串口如UART2作为通讯打印输出口
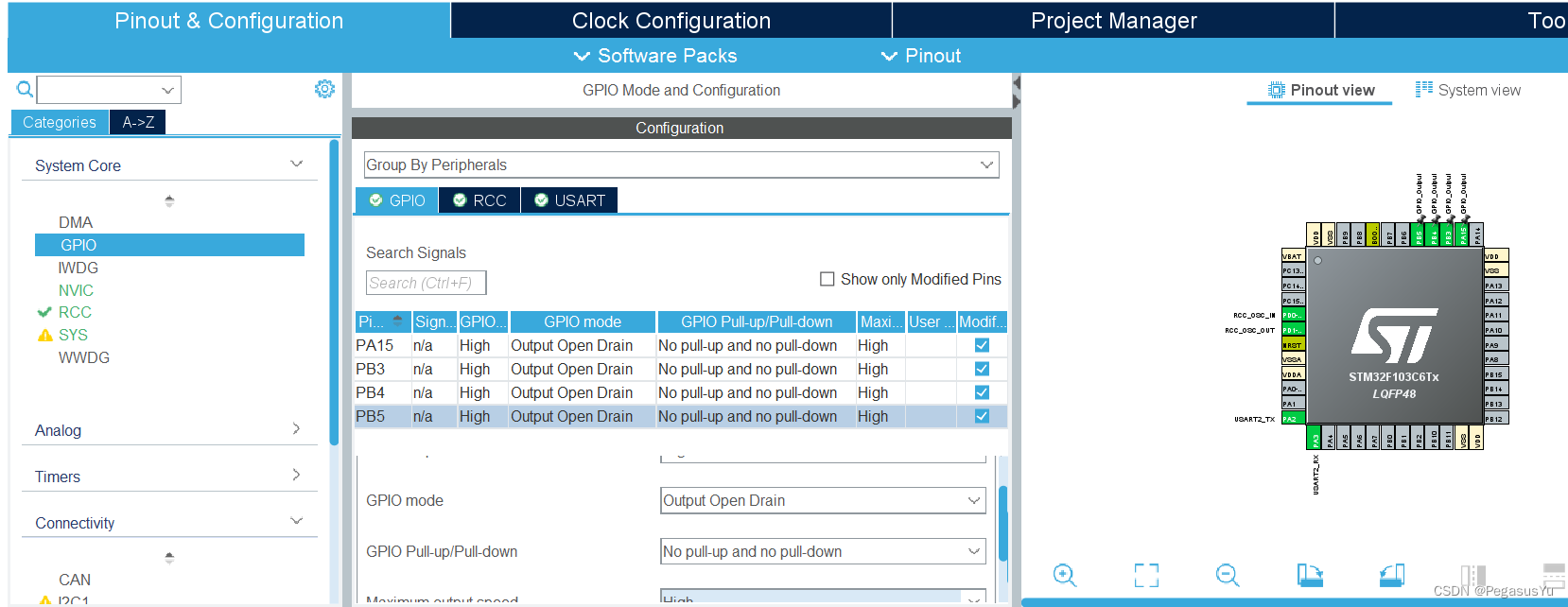
再选择4根管脚作为模拟协议用的GPIO, 这里用PA15作为CS,PB3作为CLK,PB4作为MISO, PB5作为MOSI,各管脚上外部电阻上拉到AD7791的供电电压,STM32的管脚配置为Open-drain模式,从而可以兼容不同供电电压的AD7791访问连接, 因此STM32的GPIO也都选择为具有FT(5V耐压)能力的管脚。
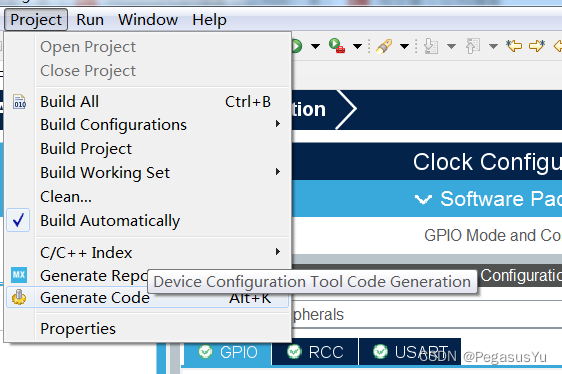
保存并生成基本工程代码:
STM32工程代码
AD7791的ADC数据读取有5种模式:
- 单次转换单次单读
- 单次转换多次单读(读到同样的数据)
- 连续转换单次单读
- 连续转换多次单读
- 连续抓换多次连读
其中单读和连续的区别是,单读的每次读取前要发送一次写操作,连续的所有读取前只发送一次写操作。这里的工程代码对5种模式都做了函数实现。
代码采用的微秒级延时函数实现,参考: STM32 HAL us delay(微秒延时)的指令延时实现方式及优化
代码用到串口打印printf函数的重载及采用的浮点转换函数,参考: STM32 UART串口printf函数应用及浮点打印代码空间节省 (HAL)
完整的main.c工程代码如下:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2022 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{__IO uint32_t firstms, secondms;__IO uint32_t counter = 0;firstms = HAL_GetTick()+1;secondms = firstms+1;while(uwTick!=firstms) ;while(uwTick!=secondms) counter++;usDelayBase = ((float)counter)/1000;
}void PY_Delay_us_t(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);delayReg = 0;while(delayReg!=usNum) delayReg++;
}void PY_usDelayOptimize(void)
{__IO uint32_t firstms, secondms;__IO float coe = 1.0;firstms = HAL_GetTick();PY_Delay_us_t(1000000) ;secondms = HAL_GetTick();coe = ((float)1000)/(secondms-firstms);usDelayBase = coe*usDelayBase;
}void PY_Delay_us(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t msNum = Delay/1000;__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);if(msNum>0) HAL_Delay(msNum);delayReg = 0;while(delayReg!=usNum) delayReg++;
}/*
*Convert float to string type
*Written by Pegasus Yu in 2022
*stra: string address as mychar from char mychar[];
*float: float input like 12.345
*flen: fraction length as 3 for 12.345
*/
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <math.h>
void py_f2s4printf(char * stra, float x, uint8_t flen)
{uint32_t base;int64_t dn;char mc[32];base = pow(10,flen);dn = x*base;sprintf(stra, "%d.", (int)(dn/base));dn = abs(dn);if(dn%base==0){for(uint8_t j=1;j<=flen;j++){stra = strcat(stra, "0");}return;}else{if(flen==1){sprintf(mc, "%d", (int)(dn%base));stra = strcat(stra, mc);return;}for(uint8_t j=1;j<flen;j++){if((dn%base)<pow(10,j)){for(uint8_t k=1;k<=(flen-j);k++){stra = strcat(stra, "0");}sprintf(mc, "%d", (int)(dn%base));stra = strcat(stra, mc);return;}}sprintf(mc, "%d", (int)(dn%base));stra = strcat(stra, mc);return;}
}
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
#define AD7791_CS_LOW HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_RESET)
#define AD7791_CS_HIGH HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_SET)
#define AD7791_CLK_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_RESET)
#define AD7791_CLK_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_SET)
#define AD7791_DIN_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET)
#define AD7791_DIN_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET)
#define AD7791_DOUT_nRDY HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4)void AD7791_RST(void)
{
/** The serial interface can be reset by writing a series of 1s on the DIN input. If a Logic 1 is written to the AD7791 line for at least* 32 serial clock cycles, the serial interface is reset.** The DOUT/ RDY pin operates as a Data Ready signal also, the line going low when a new data-word is available in the output register.* It is reset high when a read operation from the data register is complete.* It also goes high prior to the updating of the data register to indicate when not to read from the device to ensure that a data read is* not attempted while the register is being updated.*/AD7791_CS_HIGH;AD7791_DIN_HIGH;AD7791_CLK_HIGH;AD7791_CS_LOW;PY_Delay_us_t(1);for(uint8_t i=0;i<32;i++){AD7791_CLK_LOW;PY_Delay_us_t(1);AD7791_CLK_HIGH;PY_Delay_us_t(1);}AD7791_DIN_LOW;AD7791_CS_HIGH;
}/** write access to any of the other registers on the part begins with a write operation to the communications register followed by a* write to the selected register.* A read operation from any other register (except when continuous read mode is selected) starts* with a write to the communications register followed by a read operation from the selected register.*/void AD7791_WR_1BYTE(uint8_t cmd) //write 8-bit data
{for(uint8_t i=0; i<8; i++){AD7791_CLK_LOW;if ((cmd<<i)&0x80) AD7791_DIN_HIGH;else AD7791_DIN_LOW;PY_Delay_us_t(1);AD7791_CLK_HIGH;PY_Delay_us_t(1);}}uint32_t AD7791_RD_3BYTE(void) //read 24-bit data
{uint8_t rbit = 0;uint32_t rdata = 0;for(uint8_t i=1; i<=24; i++){PY_Delay_us_t(1);AD7791_CLK_LOW;PY_Delay_us_t(1);AD7791_CLK_HIGH;rbit = AD7791_DOUT_nRDY;if (rbit != 0) rdata |= (((uint32_t)rbit)<<(24-i));}return rdata;
}void AD7791_POWER_DOWN(void)
{AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x10);AD7791_WR_1BYTE(0xc4);AD7791_CS_HIGH;
}uint8_t AD7791_READ_STATUS_REG(void)
{uint8_t rbit = 0;uint8_t rdata = 0;AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x08);AD7791_DIN_LOW;AD7791_CLK_HIGH;for(uint8_t i=1; i<=8; i++){PY_Delay_us_t(1);AD7791_CLK_LOW;PY_Delay_us_t(1);AD7791_CLK_HIGH;rbit = AD7791_DOUT_nRDY;if (rbit != 0) rdata |= ((rbit)<<(8-i));}AD7791_CS_HIGH;return rdata;
}uint8_t AD7791_SET_FILTER_REG(uint8_t data)
{/** Due to chip fault, 0 or 1 written to lowest bit of filter register will become 1. So to write 0x04 will get back-read value 0x05.* So don't write filter register if you want to keep 0x04 in filter register which will be filled 0x04 when power up.*/uint8_t mode = 0x04; //default: clock without division, 16.6Hz output rateuint8_t rbit = 0;uint8_t rdata = 0;AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x20);mode = data;AD7791_WR_1BYTE(mode);AD7791_CS_HIGH;AD7791_RST();PY_Delay_us_t(1);AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x28);AD7791_DIN_LOW;AD7791_CLK_HIGH;for(uint8_t i=1; i<=8; i++){PY_Delay_us_t(1);AD7791_CLK_LOW;PY_Delay_us_t(1);AD7791_CLK_HIGH;rbit = AD7791_DOUT_nRDY;if (rbit != 0) rdata |= ((rbit)<<(8-i));}AD7791_CS_HIGH;return rdata;}uint32_t AD7791_SAMPLE_VDD_SINGLE(void)
{
/*
* Along with converting external voltages, the analog input chan-nel can be used to monitor the voltage on the VDD pin.
* When the CH1 and CH0 bits in the communications register are set to 1,
* the voltage on the VDD pin is internally attenuated by 5 and the resultant voltage is applied to the Σ-Δ modulator using an internal 1.17 V reference for analog to digital conversion.
*/uint32_t vdd = 0;AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x17);AD7791_WR_1BYTE(0x06);while(AD7791_DOUT_nRDY) ;AD7791_WR_1BYTE(0x3f);vdd = AD7791_RD_3BYTE();AD7791_CS_HIGH;AD7791_RST();return vdd;/** voltage = (vdd/16777216)*1.17*5*/
}/* ** Mode1: single conversion mode + single read mode : get one-time 24-bit data (write operation advanced before read operation)* Mode2: single conversion mode + multi-time single read mode: get multi-time same 24-bit data (write operation advanced before every read operation)* Mode3: continuous conversion mode + single read mode: get one-time 24-bit data (write operation advanced before read operation)* Mode4: continuous conversion mode + multi-time single read mode: get multi-time individual 24-bit data (write operation advanced before every read operation)* Mode5: continuous conversion mode + continuous read mode: get multi-time individual 24-bit data (only once write operation for all read operations)*/void AD7791_Mode1_RD(uint32_t *result)
{AD7791_CLK_HIGH;AD7791_CS_LOW;//AD7791_WR_1BYTE(0x12); //used for AIN(–) – AIN(–) test onlyAD7791_WR_1BYTE(0x10);AD7791_WR_1BYTE(0x86);//single conversion mode, no burn-out current, uni-polar and bufferedwhile(AD7791_DOUT_nRDY) ;AD7791_WR_1BYTE(0x38);//single read(*result) = AD7791_RD_3BYTE();AD7791_CS_HIGH;AD7791_RST();
}void AD7791_Mode2_RD(uint32_t *result, uint32_t times)
{AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x10);AD7791_WR_1BYTE(0x86);//single conversion mode, no burn-out current, uni-polar and bufferedwhile(AD7791_DOUT_nRDY) ;for(uint32_t i=0; i<times; i++){AD7791_WR_1BYTE(0x38);//single readresult[i] = AD7791_RD_3BYTE();PY_Delay_us_t(1);}AD7791_CS_HIGH;AD7791_RST();
}void AD7791_Mode3_RD(uint32_t *result)
{AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x10);AD7791_WR_1BYTE(0x06);//continuous conversion mode, no burn-out current, uni-polar and bufferedwhile(AD7791_DOUT_nRDY) ;AD7791_WR_1BYTE(0x38);//single read(*result) = AD7791_RD_3BYTE();AD7791_CS_HIGH;AD7791_RST();
}void AD7791_Mode4_RD(uint32_t *result, uint32_t times)
{AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x10);AD7791_WR_1BYTE(0x06);//continuous conversion mode, no burn-out current, uni-polar and bufferedfor(uint32_t i=0; i<times; i++){while(AD7791_DOUT_nRDY) ;AD7791_WR_1BYTE(0x38);//single readresult[i] = AD7791_RD_3BYTE();PY_Delay_us_t(1);}AD7791_CS_HIGH;AD7791_RST();
}void AD7791_Mode5_RD(uint32_t *result, uint32_t times)
{AD7791_CLK_HIGH;AD7791_CS_LOW;AD7791_WR_1BYTE(0x10);AD7791_WR_1BYTE(0x06);//continuous conversion mode, no burn-out current, uni-polar and bufferedAD7791_WR_1BYTE(0x3c);//continuous readfor(uint32_t i=0; i<times; i++){while(AD7791_DOUT_nRDY) ;result[i] = AD7791_RD_3BYTE();PY_Delay_us_t(1);}AD7791_CS_HIGH;AD7791_RST();
}
/* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
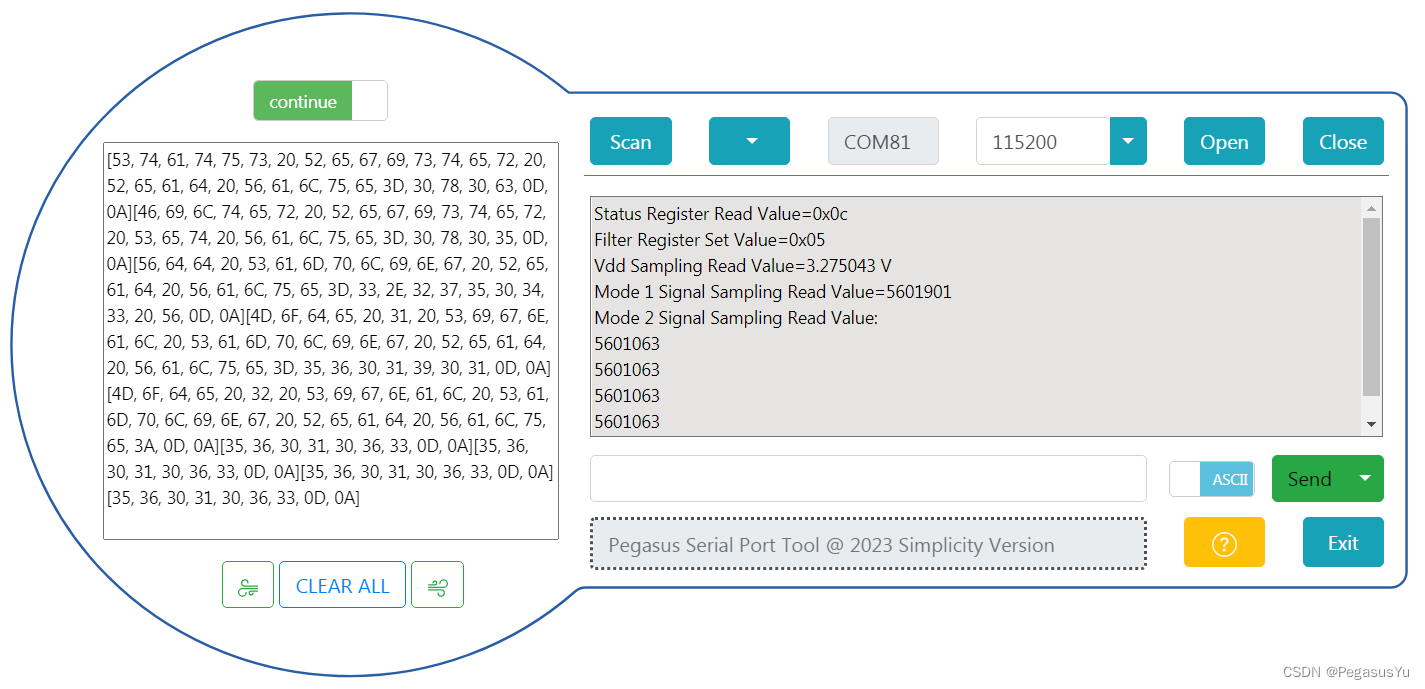
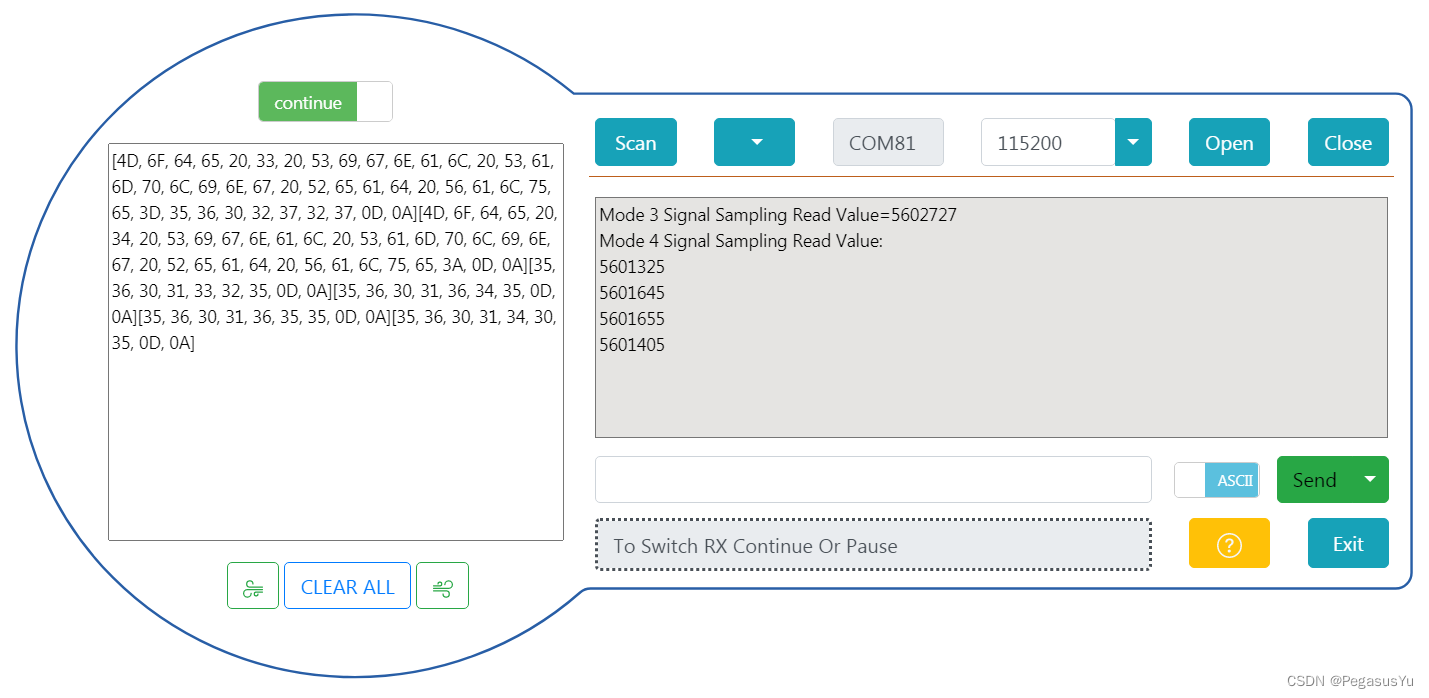
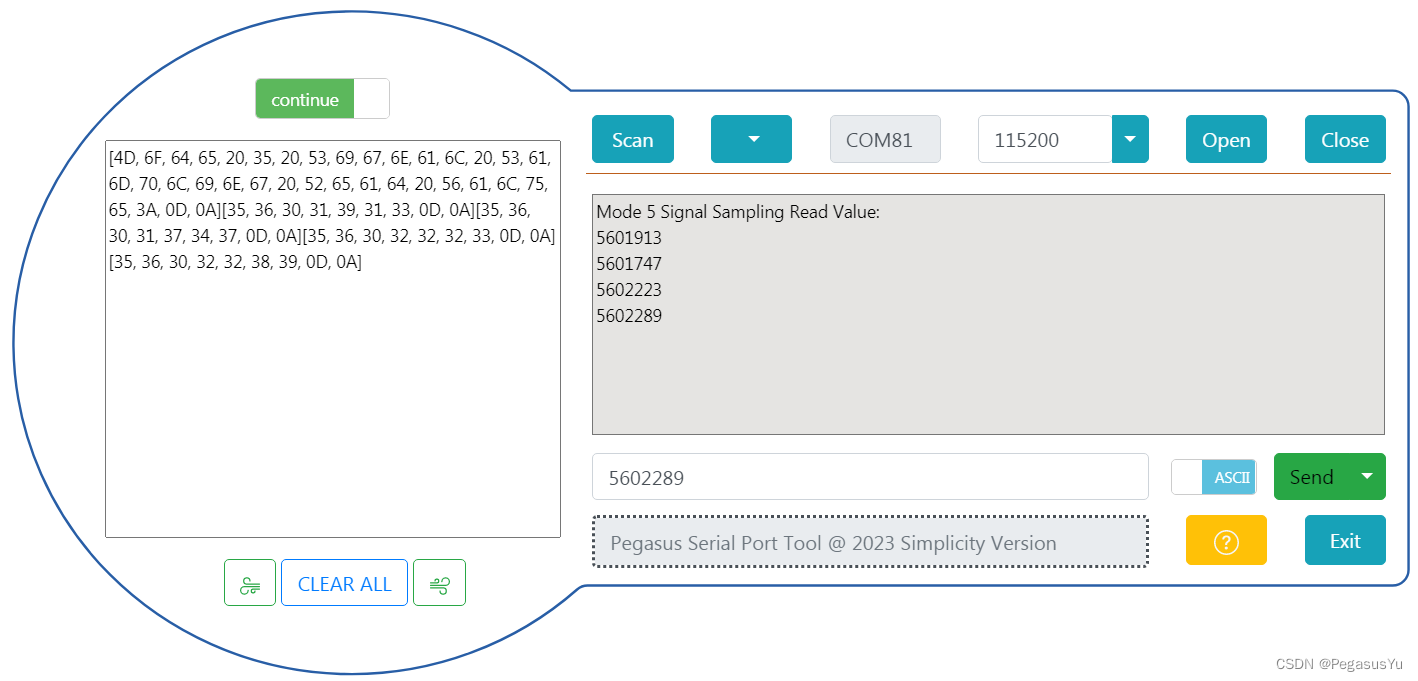
{/* USER CODE BEGIN 1 */uint32_t AData[128];float vdd;char mychar[100];/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART2_UART_Init();/* USER CODE BEGIN 2 */PY_usDelayTest();PY_usDelayOptimize();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){printf("Status Register Read Value=0x%02x\r\n", AD7791_READ_STATUS_REG());printf("Filter Register Set Value=0x%02x\r\n", AD7791_SET_FILTER_REG(0x05));vdd = ((float)AD7791_SAMPLE_VDD_SINGLE())*1.17*5/16777216;py_f2s4printf(mychar, vdd, 6);printf("VDD Sampling Read Value=%s V\r\n", mychar);AD7791_Mode1_RD(AData);printf("Mode 1 Signal Sampling Read Value=%d\r\n", AData[0]);AD7791_Mode2_RD(AData, 4);printf("Mode 2 Signal Sampling Read Value:\r\n%d\r\n%d\r\n%d\r\n%d\r\n", AData[0], AData[1], AData[2], AData[3]);AD7791_Mode3_RD(AData);printf("Mode 3 Signal Sampling Read Value=%d\r\n", AData[0]);AD7791_Mode4_RD(AData, 4);printf("Mode 4 Signal Sampling Read Value:\r\n%d\r\n%d\r\n%d\r\n%d\r\n", AData[0], AData[1], AData[2], AData[3]);AD7791_Mode5_RD(AData, 4);printf("Mode 5 Signal Sampling Read Value:\r\n%d\r\n%d\r\n%d\r\n%d\r\n", AData[0], AData[1], AData[2], AData[3]);PY_Delay_us_t(1000000);printf("\r\n");/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief USART2 Initialization Function* @param None* @retval None*/
static void MX_USART2_UART_Init(void)
{/* USER CODE BEGIN USART2_Init 0 *//* USER CODE END USART2_Init 0 *//* USER CODE BEGIN USART2_Init 1 *//* USER CODE END USART2_Init 1 */huart2.Instance = USART2;huart2.Init.BaudRate = 115200;huart2.Init.WordLength = UART_WORDLENGTH_8B;huart2.Init.StopBits = UART_STOPBITS_1;huart2.Init.Parity = UART_PARITY_NONE;huart2.Init.Mode = UART_MODE_TX_RX;huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart2.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART2_Init 2 *//* USER CODE END USART2_Init 2 */}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOD_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_SET);/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5, GPIO_PIN_SET);/*Configure GPIO pin : PA15 */GPIO_InitStruct.Pin = GPIO_PIN_15;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/*Configure GPIO pins : PB3 PB4 PB5 */GPIO_InitStruct.Pin = GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */STM32测试输出
串口测试输出如下:
例程下载
STM32F103C6T6模拟SPI协议读取24位模数转换(24bit ADC)芯片AD7791数据例程
–End–
相关文章:
STM32模拟SPI协议获取24位模数转换(24bit ADC)芯片AD7791电压采样数据
STM32模拟SPI协议获取24位模数转换(24bit ADC)芯片AD7791电压采样数据 STM32大部分芯片只有12位的ADC采样性能,如果要实现更高精度的模数转换如24位ADC采样,则需要连接外部ADC实现。AD7791是亚德诺(ADI)半导体一款用于低功耗、24…...
| 代码+思路+重要知识点)
华为OD机试题 - 交换字符(JavaScript)| 代码+思路+重要知识点
最近更新的博客 华为OD机试题 - 字符串加密(JavaScript) 华为OD机试题 - 字母消消乐(JavaScript) 华为OD机试题 - 字母计数(JavaScript) 华为OD机试题 - 整数分解(JavaScript) 华为OD机试题 - 单词反转(JavaScript) 使用说明 参加华为od机试,一定要注意不要完全背…...
最好的工程师像投资者一样思考,而不是建设者
我在大学期间住在图书馆。“我学习的教科书理论越多,我就会成为一名更好的工程师,”我想。然而,当我开始工作时,我注意到业内最优秀的工程师并不一定比应届毕业生了解更多的理论。他们只是带来了不同的心态,即投资者的…...
Mysql里的ibtmp1文件太大,导致磁盘空间被占满
目录 一、查看磁盘的时候发现磁盘空间100% 二、 排查的时候:查看是什么文件占用的时候,发现是数据库临时表空间增长的 三、为了避免以后再次出现ibtmp1文件暴涨,限制其大小,需在配置文件加入 四、重启Mysql实例(重启后…...
android kotlin 协程(四) 协程间的通信
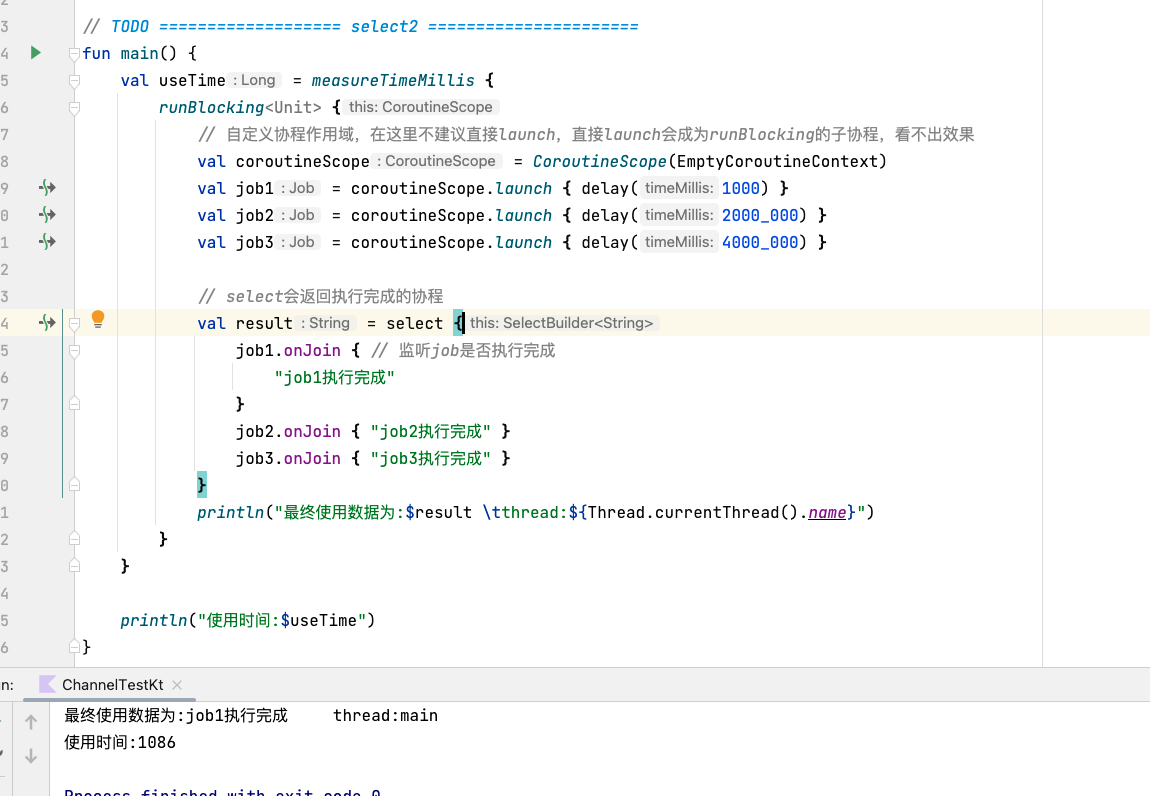
android kotlin 协程(四) 协程间的通信 学完本篇你将会了解到: channelproduceactorselect 先来通过上一篇的简单案例回顾一下挂起于恢复: fun main() {val waitTime measureTimeMillis {runBlocking<Unit> {println("main start") // 1 // …...

苹果手机通讯录突然没了怎么恢复?
手机成为生活中的必需品,都会存储着各种数据文件,比如我们使用过的APP、音乐、照片、通讯录等通常都是存在这里面的。但我们的操作难免会有意外,有的是手动不小心删的,有的是误删的,有的是自己孩子删的等,却…...

BI知识全解,值得收藏
2021年度,中国商业软件市场的增长趋势是快速增长的,达到7.8亿美元,同比增长34.9%。商业智能BI在企业应用中具有巨大的价值,并逐渐成为现代企业信息化和数字化转型的基础。所以,全面了解BI,对于企业管理是非…...
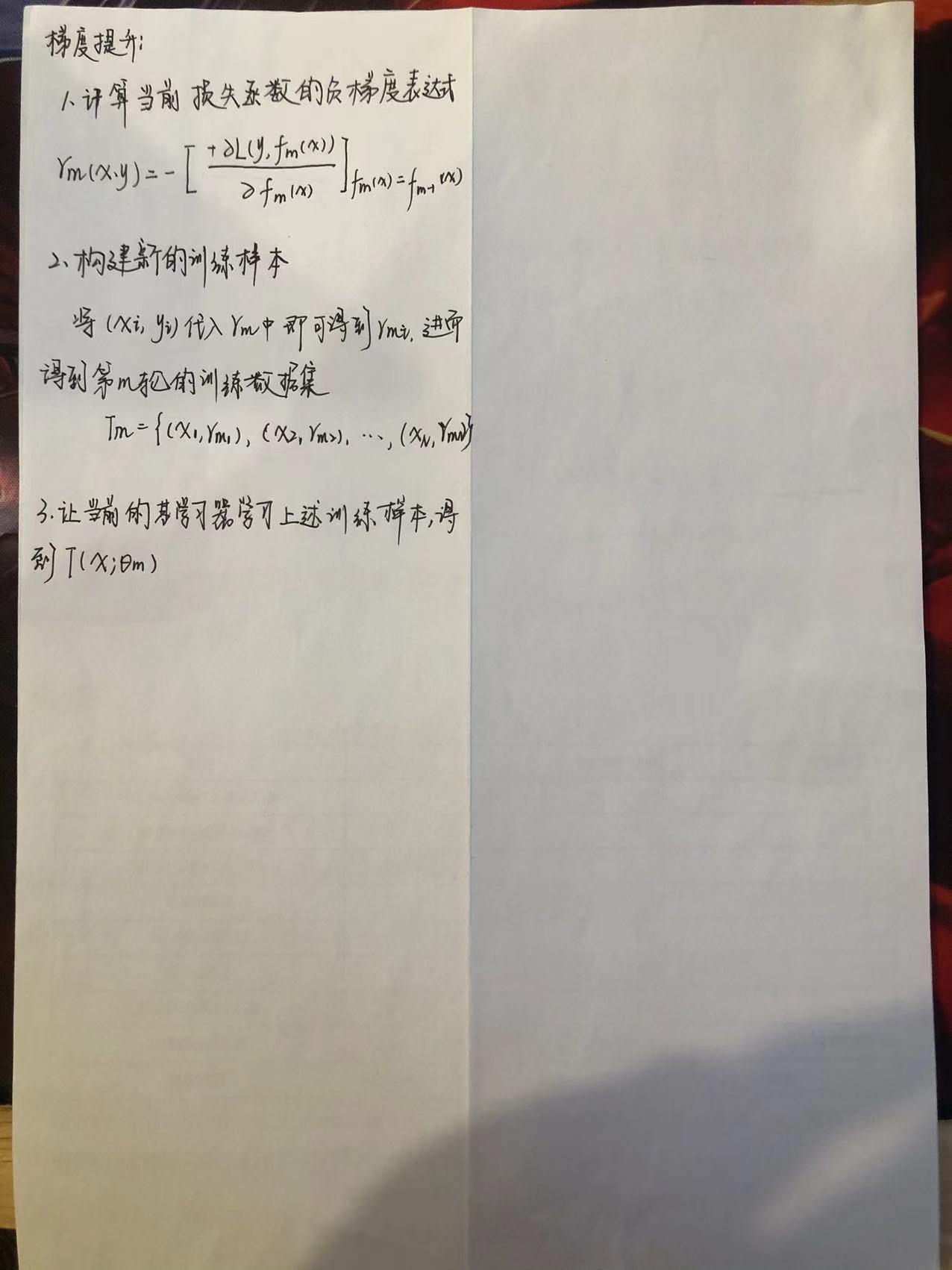
【机器学习】GBDT
1.什么是GBDT GBDT(Gradient Boosting Decision Tree),梯度提升树。它是一种基于决策树的集成算法。其中Gradient Boosting 是集成方法boosting中的一种算法,通过梯度下降来对新的学习器进行迭代。它是利用损失函数的负梯度方向在当前模型的值作为残差的…...

C#开发的OpenRA游戏高性能内存访问的方法
C#开发的OpenRA游戏高性能内存访问的方法 一个游戏性能往往是比较关键的, 因为游戏很多时候是比拼的是人的速度和技巧。 比如王者荣耀里,一个大招是否及时地放得出来,就会影响到一场比赛的关键。 而这个大招的释放,又取决于游戏运行在手机上的性能。 如果游戏太耗性能,导致…...
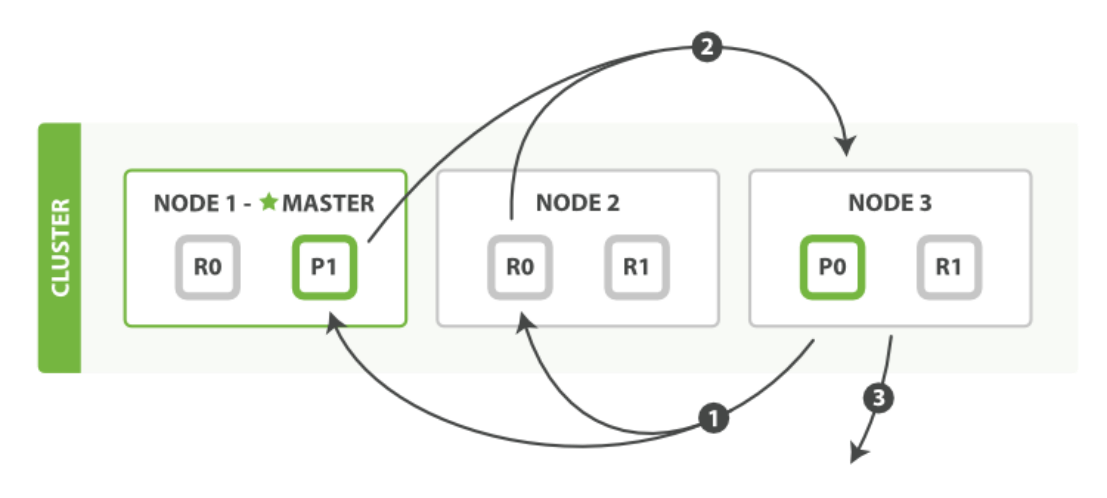
【elasticsearch】elasticsearch es读写原理
一、前言: 今天来学习下 es 的写入原理。 Elasticsearch底层使用Lucene来实现doc的读写操作: Luence 存在的问题: 没有并发设计 lucene只是一个搜索引擎库,并没有涉及到分布式相关的设计,因此要想使用Lucene来处理海量…...

数据在内存中的存储【上篇】
文章目录⚙️1.数据类型的详细介绍🔩1.1.类型的基本归类⚙️2.整型在内存中的存储🔩2.1.原码、反码、补码🔩2.2.大小端的介绍⚙️1.数据类型的详细介绍 🥳基本的内置类型 : 💡char ---------- 字符数据类型…...
慕了没?3年经验,3轮技术面+1轮HR面,拿下字节30k*16薪offer
前段时间有个朋友出去面试,这次他面试目标比较清晰,面的都是业务量大、业务比较核心的部门。前前后后去了不少公司,几家大厂里,他说给他印象最深的是字节3轮技术面1轮HR面,他最终拿到了30k*16薪的offer。第一轮主要考察…...

「可信计算」与软件行为学
可信计算组织(Ttrusted Computing Group,TCG)是一个非盈利的工业标准组织,它的宗旨是加强在相异计算机平台上的计算环境的安全性。TCG于2003年春成立,并采纳了由可信计算平台联盟(the Trusted Computing Platform Alli…...
| 代码+思路+重要知识点)
华为OD机试题 - 找字符(JavaScript)| 代码+思路+重要知识点
最近更新的博客 华为OD机试题 - 字符串加密(JavaScript) 华为OD机试题 - 字母消消乐(JavaScript) 华为OD机试题 - 字母计数(JavaScript) 华为OD机试题 - 整数分解(JavaScript) 华为OD机试题 - 单词反转(JavaScript) 使用说明 参加华为od机试,一定要注意不要完全背…...

Linux 进程启动方法
现实中程序编写的时候,经常会碰到一些这样需求:调用系统命令,完成一些操作,或判定结果 或获取结果作为启动进程,调用第三方进程,并监控进程是否退出加载升级进程,升级进程kill调用者或调用者自行…...

CLEVE:事件抽取的对比预训练
CLEVE: Contrastive Pre-training for Event Extraction 论文:CLEVE: Contrastive Pre-training for Event Extraction (arxiv.org) 代码:THU-KEG/CLEVE: Source code for ACL 2021 paper “CLEVE: Contrastive Pre-training for Event Extraction” (g…...
【C++】AVLTree——高度平衡二叉搜索树
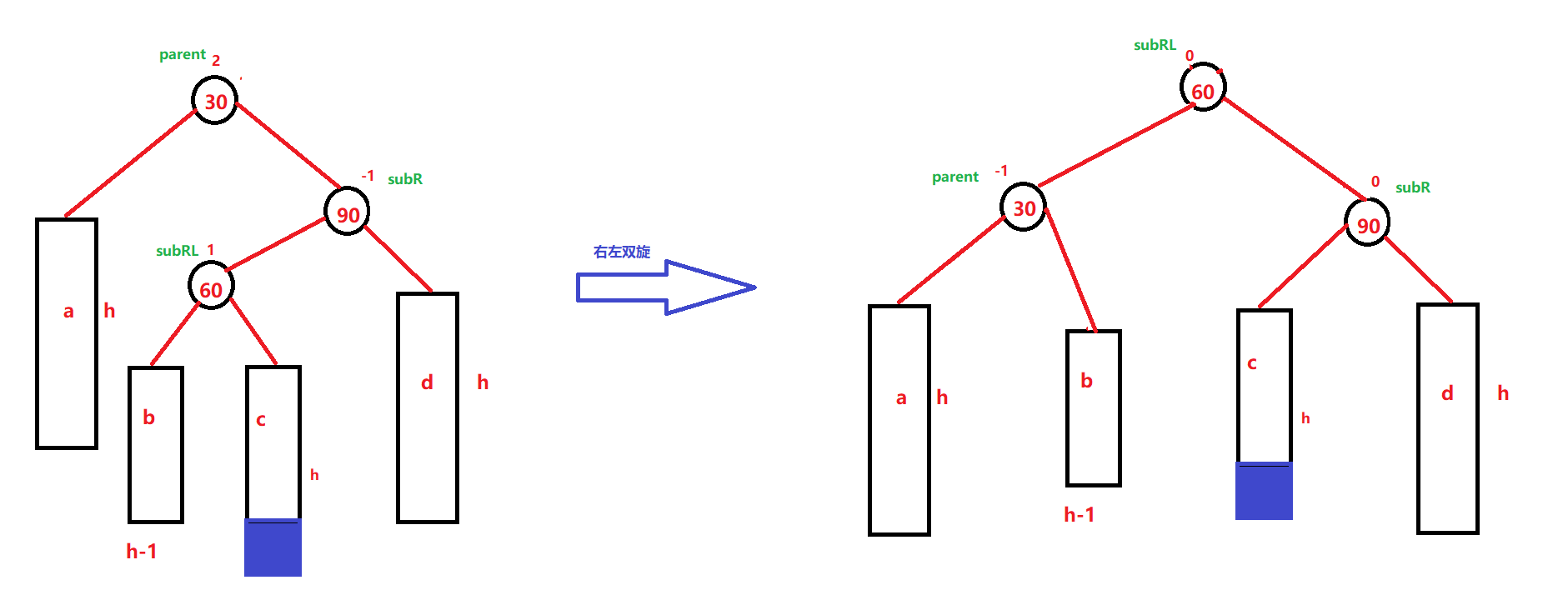
文章目录一、AVL树的概念二、AVL树节点的定义三、AVL树的插入四、AVL树的旋转1.左单旋2.右单旋3.左右双旋4.右左双旋五、进行验证六、AVLTree的性能个人简介📝 🏆2022年度博客之星Top18;🏆2022社区之星Top2;的🥇C/C领域优质创作者…...
软考中级-嵌入式系统设计师(二)
1、逻辑电路:组合逻辑单路、时序逻辑电路。根据电路是否有存储功能判断。 2、组合逻辑电路 指该电路在任一时刻的输出,仅取决于该时刻的输入信号,而与输入信号作用前电路的状态无关。一般由门电路组成,不含记忆元器件࿰…...

epoll 笔记
maxevents 参数大小一般不超过64必须够了 maxevents 个事件,才会传到用户空间吗?可见,只要有事件就可以传到用户空间。一台服务器可以支撑多少个链接https://blog.csdn.net/mijichui2153/article/details/81331345 0、两台虚拟机的初始状态如…...

vue(5)
文章目录1. 监测数据原理1.1 通过问题引出1.2 开始1.3 Vue.set() 方法1.4 vue 监视 数组1.5 小练习2. 收集表数据3. 过滤器4. 内置指令4.1 v-text4.2 v-html4.3 v-cloak4.4 v-once4.5 v-pre1. 监测数据原理 1.1 通过问题引出 1.2 开始 要想解决上面的这个问题 ,需要…...

vue 求助
这个浅灰色的背景框怎么改啊,没招了...

别再删容器重装了!Docker运行n8n工作流的正确姿势:从环境变量到数据持久化
Docker部署n8n工作流:从环境变量配置到持久化存储的完整实践指南 遇到n8n的Secure Cookie警告就删容器重装?这种简单粗暴的操作不仅低效,还可能丢失关键数据。本文将带你深入理解Docker部署n8n的正确方法论,从环境变量配置到数据…...

弃投《Nature Communications》转投它?这些期刊正在让这批科研人弯道超车!
《Science Advances》影响因子分区自引率12.5JCR Q1 / 综合1区 1.6%研究方向:多学科综合、自然科学与工程期刊亮点:AAAS顶刊,年发文约2000篇,国人占比约30%,审稿3-5个月,OA发表,是各学科冲一区顶…...

AI 术语通俗词典:置信度
置信度是统计学、机器学习、人工智能和信息检索中非常常见的一个术语。它通常用来描述一个模型、系统或方法对自己输出结果“有多确定”的程度。换句话说,置信度是在回答:这个结果看起来有多像是对的。如果说预测结果回答的是“模型给出的答案是什么”&a…...

Windows系统指针美化全攻略:基于开源方案的跨平台实现
Windows系统指针美化全攻略:基于开源方案的跨平台实现 【免费下载链接】macOS-cursors-for-Windows Tested in Windows 10 & 11, 4K (125%, 150%, 200%). With 2 versions, 2 types and 3 different sizes! 项目地址: https://gitcode.com/gh_mirrors/ma/macO…...
)
STM32F4项目实战:用INA219给锂电池做个“智能管家”(附完整代码)
STM32F4项目实战:用INA219打造高精度锂电池监控系统 锂电池作为便携式设备的能量来源,其状态监控直接影响设备可靠性和用户体验。传统电压检测法误差高达20%,而采用TI的INA219电流传感器配合STM32F4系列MCU,可实现0.5%精度的充放电…...

如何用GHelper替代Armoury Crate,让华硕笔记本性能与续航双丰收?
如何用GHelper替代Armoury Crate,让华硕笔记本性能与续航双丰收? 【免费下载链接】g-helper Lightweight, open-source control tool for ASUS laptops and ROG Ally. Manage performance modes, fans, GPU, battery, and RGB lighting across Zephyrus,…...

微电网优化调度:PSO与SSA算法的奇妙碰撞
Matlab代码:微电网的优化调度,以微电网的运行成本最小为目标进行优化,并把失负荷惩罚成本计入总目标当中,分别采用PSO算法和麻雀搜索算法(SSA算法,2020年新提出)进行优化求解,可分别…...

Tsuru容器网络终极性能测试指南:7大CNI插件深度对比与优化策略
Tsuru容器网络终极性能测试指南:7大CNI插件深度对比与优化策略 【免费下载链接】tsuru Open source and extensible Platform as a Service (PaaS). 项目地址: https://gitcode.com/gh_mirrors/ts/tsuru Tsuru作为开源可扩展的PaaS平台,其容器网络…...

如何为Wolverine贡献代码:从Bug报告到PR提交的完整指南
如何为Wolverine贡献代码:从Bug报告到PR提交的完整指南 【免费下载链接】wolverine 项目地址: https://gitcode.com/gh_mirrors/wo/wolverine Wolverine是一个能为Python脚本提供"再生修复能力"的工具,当脚本运行出错时,它…...