哪种英特尔实感设备适合您?
原文链接
https://www.intelrealsense.com/which-device-is-right-for-you/
无论您是深度和跟踪硬件的新手,还是经验丰富的专业人士,确定我们提供的众多英特尔实感产品中哪些产品适合您的项目仍然是一项挑战。在这篇文章中,我们将讨论英特尔实感深度摄像头 SR305、D415、D435 和 D435i,以及英特尔实感跟踪摄像头 T265 和新型激光雷达摄像头 L515。
首先,深度有什么用?跟踪是什么意思?深度相机不仅可以看到场景的 2D 细节,还可以计算每个像素距相机的距离。像 D400 系列这样的立体相机从相机上的两个传感器拍摄两张图像,这些图像的视角略有不同,然后对它们进行比较。两个图像中相同点之间的偏移可用于确定深度。L515 等 LiDAR 相机向场景周围发射激光,并测量光反射回相机所需的时间。像 SR305 这样的编码光相机使用介于两种方法之间的方法,即投射图案光,然后评估图案随时间的变形情况。
当您拥有这些深度图像时,您可以将它们用于许多不同的目的。3D 扫描是一种流行的应用,此外还有骨骼和手势跟踪、测量、体积捕捉、VR 和 AR,以及机器人和无人机中的许多用途。
另一方面,当我们谈论跟踪相机时,我们谈论的是可以跟踪其自身位置和空间运动的相机。虽然深度相机可用于跟踪相机前面的物体和人,但像 T265 这样的跟踪相机可用于高精度跟踪其附着的任何物体。这可能是增强现实耳机、自主无人机或自主机器人之类的东西。
相机详细分解
从立体深度相机开始,让我们看看模型之间有什么相同之处。从物理上看,前三款立体深度相机(D415、D435、D435i)的尺寸大致相同(毫米以内)。D455 尺寸较大,可适应传感器之间更大的距离(或基线)95 毫米。它们都使用相同的视觉处理器通过 USB 3.1 提供 RGB-D 数据,并且具有相同的最大深度分辨率 1280 x 720。有关具体测量结果,请参阅帖子末尾的完整比较表。立体深度相机的一个关键优势是它们在室内和室外表现同样出色 - 尽管您应该避免太阳直接指向相机镜头的情况。
D415 和 D435
这两个型号之间有两个主要区别 - 视场 (FOV) 和快门类型。D435i 在各方面都与 D435 相同,只是增加了惯性测量单元或 IMU,因此对于所有其他功能,您可以假设它与 D435 相同。
视场
英特尔实感深度摄像头 D415 的视场角 (FOV) 约为 650°。英特尔实感 D435 深度摄像头具有更宽的视场角,约为 85°。
这对于相机的性能意味着什么?由于英特尔实感 D435 深度摄像头的视场较大,因此在查看图像的特定部分时,您会发现粒度较小。
这些图片显示了每个摄像头传感器所见内容的放大和夸大视图:
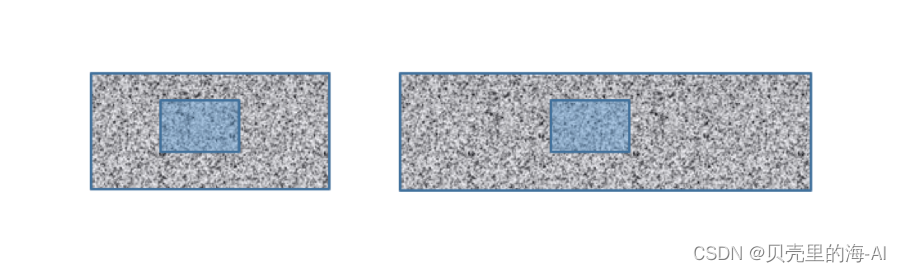
查看图片上相同大小的区域,请注意英特尔实感 D415 具有更高的像素密度,这意味着它对于任何给定区域都比英特尔实感 D435 更准确在相同的点上。在相同分辨率下,D415 每度拥有更多像素,因为它在更窄的视场中拥有相同数量的像素。虽然这在某些情况下可能并不重要,例如物体回避或人员检测,但当准确性是首要考虑因素时(例如在 3D 扫描中),D415 将提供更好、更准确的扫描。简而言之,D415 的精度是 D435 的两倍以上。
快门类型
其次,英特尔实感 D415 深度摄像头具有滚动快门,而英特尔实感 D435 深度摄像头具有全局快门。具有卷帘快门的相机通过快速左右或垂直扫描来记录场景中的所有像素。这通常会在几个帧的过程中发生,但数据将保存为单个帧。
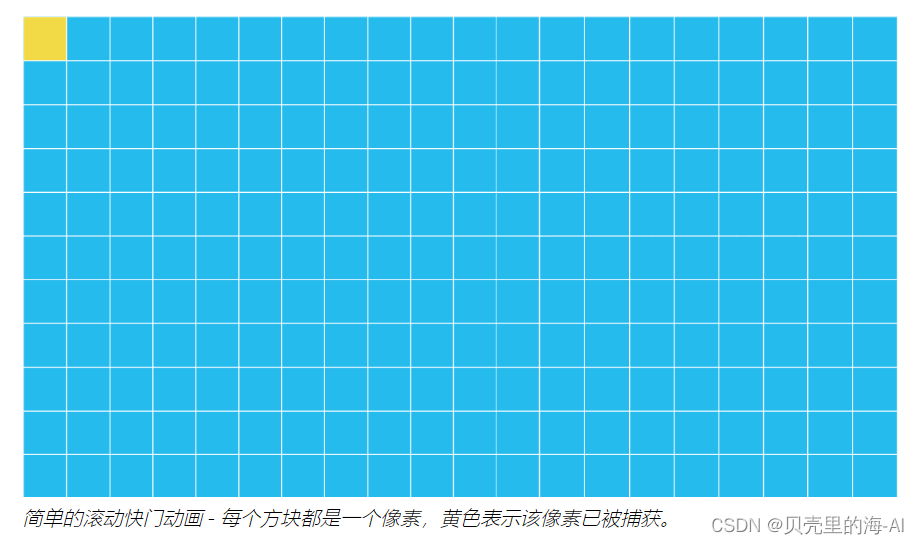
全局快门相机的操作方式有所不同,它们在单个帧中拍摄整个场景,因此每个像素都会被同时捕获。
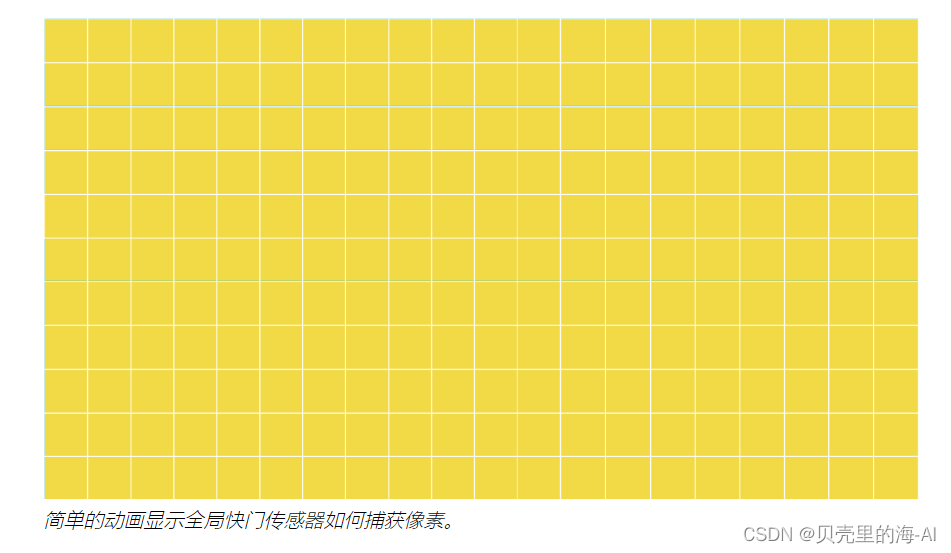
简单的动画显示全局快门传感器如何捕获像素。
在实践中,由于卷帘快门相机捕获的图像按时间略有划分,因此当场景中的某些物体快速移动时,可能会导致奇怪的图像伪影。在下图中,螺旋桨叶片扭曲,因为当成像传感器到达图像的不同部分时,螺旋桨已轻微移动。
英特尔实感 D435 深度摄像头的更宽视场使其更适合机器人和无人机导航等用例。更大的视场可以让您有更多的时间对障碍物做出反应,此外,如果您通过防止深度图像模糊来捕捉高速运动,则全局快门可以提供更好的性能。
英特尔实感深度摄像头 D455
D455 是加入立体深度系列的最新摄像头。如前所述,D455 将深度传感器之间的距离延长至 95 mm,从而将 4 m 处的深度 (Z) 误差*改善至小于 2%。D455 在 D435i 的设计上进行了改进,并进行了多项更改。与 D415/D435/D435i 相同的范围内,更宽的基线可提供更好的精度。
为了改善深度和 RGB 图像之间的对应性,RGB 传感器包含全局快门以匹配深度传感器上的全局快门。两个传感器现在都有 86° 的视野。这些更改使深度和 RGB 点更容易对齐。
与 D435i 一样,D455 还集成了 IMU,使您的应用程序能够在相机移动的任何情况下完善其深度感知。D455 通过 USB 3.1 连接供电,功耗与 D435i 类似。
英特尔实感模块差异
深度摄像头之间的另一个区别是,英特尔实感 D415 深度摄像头基于英特尔实感 D415 模块。这意味着成像器、发射器和 RGB 位于一块计算板或加强板上,从而使校准变得更加容易。D455 还将所有成像器、发射器和 RGB 传感器放置在同一个加强板上。
英特尔实感 D435 摄像头基于英特尔实感 D430 模块,并带有一个附加但独立的 RGB 摄像头。深度算法基于传感器的精确放置,因此不将它们固定在同一加强筋上可能会使深度和 RGB 之间的校准出现问题。然而,上一代相机的用户表示,他们确实希望能够灵活地选择自己的 RGB 传感器,因此 D435 诞生了,虽然使用这款相机同时精确校准颜色和深度数据更具挑战性,但仍然是可能的。
成像器差异和准确性
英特尔实感 D415 深度摄像头使用 2 兆像素成像器,而英特尔实感 D435 深度摄像头的成像器各为 1 兆像素。
最小 Z 差异
接下来,让我们比较“最小 Z”或从深度相机到被捕获物体的距离。与英特尔实感 D415 深度摄像头相比,英特尔实感 D435 深度摄像头在任何给定范围内都具有更多的深度噪声 (>2x),并且在相同分辨率下它的最小操作距离更小 (~0.5x),这意味着您可以获得离相机更近。例如,在 848 x 480 分辨率下,英特尔实感 D415 深度摄像头的最小 Z 约为 29 厘米,而英特尔实感 D435 深度摄像头的最小 Z 为 17 厘米。D455 在 4 m 处的深度误差小于 2%,最佳范围为 0.4 至 6 m。
相关文章:
哪种英特尔实感设备适合您?
原文链接 https://www.intelrealsense.com/which-device-is-right-for-you/ 无论您是深度和跟踪硬件的新手,还是经验丰富的专业人士,确定我们提供的众多英特尔实感产品中哪些产品适合您的项目仍然是一项挑战。在这篇文章中,我们将讨论英特尔…...

C++11的四种强制类型转换
目录 语法格式 static_cast(静态转换) dynamic_cast(动态转换) const_cast(常量转换) reinterpret_cast(重解释) 语法格式 cast-name <typename> (expression) 其中cast-name为static_cast、dynamic_cast、const_cast 和 reinterpret_cast之一…...
分布式事务(4):两阶段提交协议与三阶段提交区别
1 两阶段提交协议 两阶段提交方案应用非常广泛,几乎所有商业OLTP数据库都支持XA协议。但是两阶段提交方案锁定资源时间长,对性能影响很大,基本不适合解决微服务事务问题。 缺点: 如果协调者宕机,参与者没有协调者指…...
------ 实现多节点渲染【修改beginWork和completeWork】)
React源码解析18(9)------ 实现多节点渲染【修改beginWork和completeWork】
摘要 目前,我们已经实现了单节点的,beginWork,completeWork,diff流程。但是对于多节点的情况,比如: <div><span></span><span></span> </div>这种情况,我们还没有处…...
【GUI】基于开关李雅普诺夫函数的非线性系统稳定(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
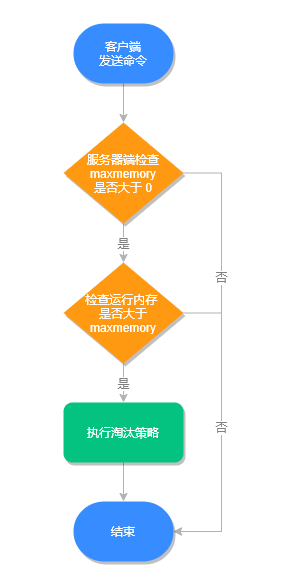
Redis 缓存满了怎么办?
引言 Redis 缓存使用内存来保存数据,随着需要缓存的数据量越来越大,有限的缓存空间不可避免地会被写满。此时,应该怎么办?本篇文章接下来就来聊聊缓存满了之后的数据淘汰机制。 值得注意的是,在 Redis 中 过期策略 和…...
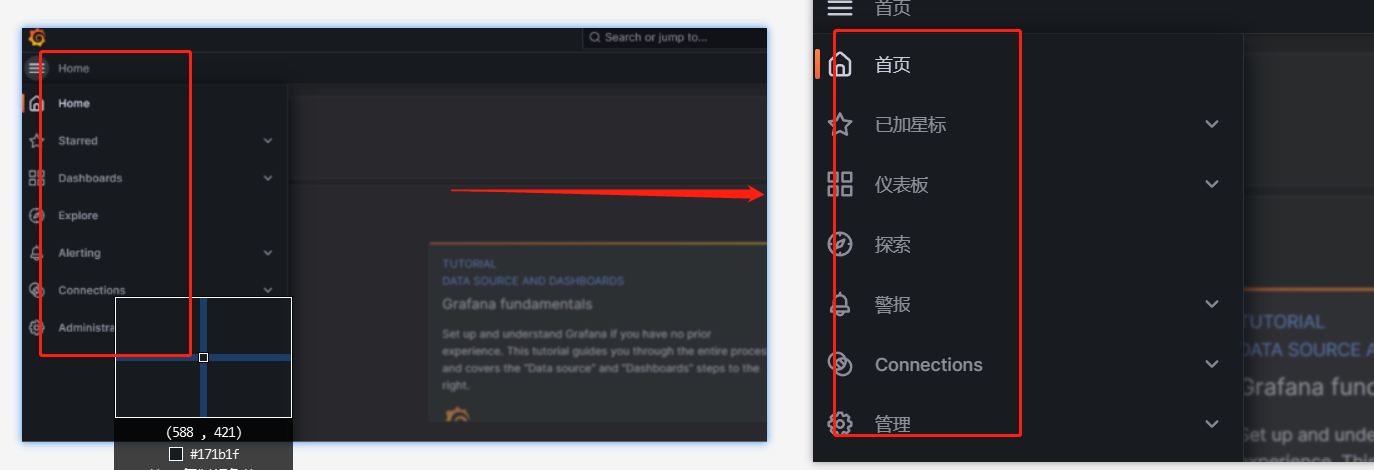
Grafana 安装配置教程
Grafana 安装配置教程 一、介绍二、Grafana 安装及配置2.1 下载2.2 安装2.2.1 windows安装 - 图形界面2.2.2 linux安装 - 安装脚本 三、Grafana的基本配置3.1 登录3.2 Grafana设置中文 四、grafana基本使用 一、介绍 Grafana是一个通用的可视化工具。对于Grafana而言࿰…...

【Linux】临界资源和临界区
目录 一、临界资源 二、如何实现对临界资源的互斥访问 1、互斥量 2、信号量 3、临界区 三、临界区 四、进程进入临界区的调度原则 一、临界资源 概念:临界资源是一次仅允许一个进程使用的共享资源,如全局变量等。 二、如何实现对临界资源的互斥访问 …...

拓扑排序Topological sorting/DFS C++应用例题P1113 杂务
拓扑排序 拓扑排序可以对DFS的基础上做变更从而达到想要的排序效果。因此,我们需要xy准备,vis数组记录访问状态,每一个任务都可以在dfs的过程中完成。 在使用拓扑排序方法时一些规定: 通常使用一个零时栈不会直接输出排序的节点…...
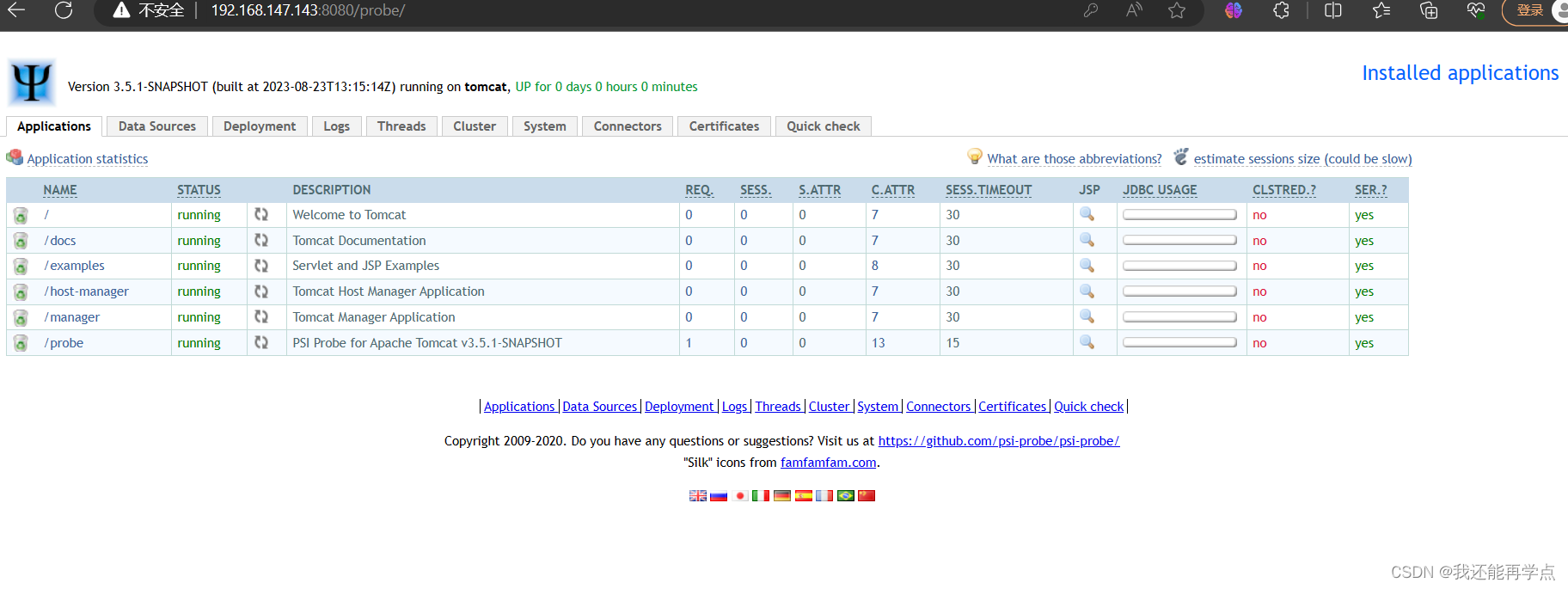
基于jenkins构建生成CICD环境
目录 一、安装配置jenkins 1、环境配置 2、软件要求 3、jdk安装(我是最小化安装,UI自带java要先删除rm -rf /usr/local/java 4、安装jenkins-2.419-1.1 二、Jenkins配置 1、修改jenkins初始密码 2、安装 Jenkins 必要插件 3、安装 Publish Over SS…...

在线图片怎么转换成PDF?在线图片转换成PDF步骤介绍
文件格式要转化不知道怎么办?想要网上下载文件格式转换软件,但是却不知道下载哪个好?今天小编小编就给大家分享一下靠谱的小圆象PDF转换器工具,想知道这款软件好不好用?在线图片怎么转换成PDF?那就进来看看吧。 在线图片怎么转换成PDF 小圆象PDF转换…...
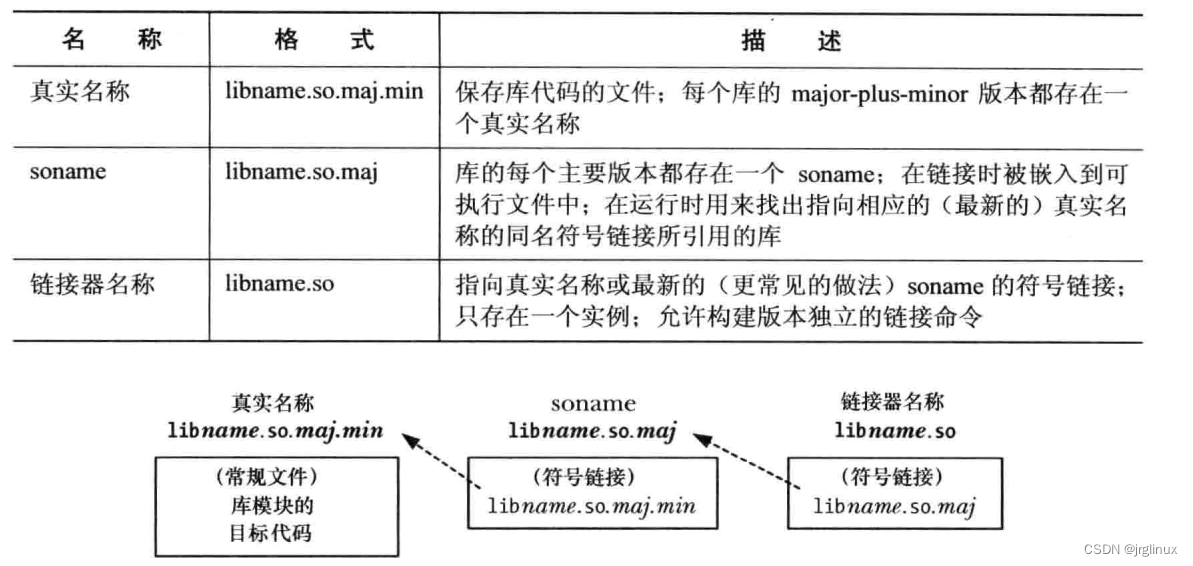
Linux共享库基础及实例
共享库是将库函数打包成一个可执行文件,使得其在运行时可以被多个进程共享。 目标库 回顾下构建程序的一种方式: 将每个源文件编译成目标文件,再通过链接器将这些目标文件链接组成一个可执行程序。 gcc -g -c prog.c mod1.c mod2.c gcc -g …...
java八股文面试[java基础]——final 关键字作用
为什么局部内部类和匿名内部类只能访问final变量: 知识来源 【基础】final_哔哩哔哩_bilibili...
Redis 分布式锁存在什么问题 ?如何解决 ?
目录 1. 如何实现分布式锁 2. Redis 分布式锁存在什么问题 2.1 解决死锁问题 2.2 解决锁误删问题 1. 如何实现分布式锁 Redis 天生就可以作为一个分布式系统来使用,所以它实现的锁都是分布式锁。 Redis 可以通过 setnx(set if not exists)…...

n5173b是德科技keysight N5173B信号发生器
产品概述 是德科技/安捷伦N5173B EXG模拟信号发生器 当您需要平衡预算和性能时,是德科技N5173B EXG微波模拟信号发生器是经济高效的选择。它提供解决宽带滤波器、放大器、接收机等参数测试的基本信号。执行基本LO上变频或CW阻塞,低成本覆盖13、20、31.…...
------ 实现多节点的Diff算法)
React源码解析18(10)------ 实现多节点的Diff算法
摘要 在上一篇中,实现了多节点的渲染。但是之前写得diff算法,只能适用于单节点的情况,例如这种情况: <div><p><span></span></p> </div>如果对于多节点的情况: <ul><…...

Linux指令篇!
Linux 是一个广泛使用的开源操作系统,以下是一些常用的 Linux 知识点和指令: 1. 文件和目录操作: - ls:列出目录内容 - cd:切换目录 - pwd:显示当前工作目录 - mkdir:创建目录 - touch…...

Vue2学习笔记のVue组件化编程
目录 Vue组件化编程非单文件组件基本使用几个注意点组件的嵌套VueComponent一个重要的内置关系 单文件组件index.htmlmain.jsApp.vueSchool.vueStudent.vue 各位小伙伴们好呀,不知道上一篇文章你是否有收获!这篇是Vue2学习笔记第二篇,也是Vue…...

跨境电商儿童沙画办理EN71测试标准
儿童沙画就是小孩子玩的那种用彩色沙子或者彩色墨水,在有图形轮廓的纸片上去绘画,可以按照儿童沙画底板上的人物轮廓线条,动物线条,风景线条,动漫线条,去添加自己喜欢的颜色,让单调的线条变成自…...
chrome浏览器账号密码输入框自动填充时背景色不变
处理前 使用延时的方式解决 .login-box input,password:-webkit-autofill .login-box input,password:-webkit-autofill:hover, .login-box input,password:-webkit-autofill:focus, .login-box input,password:-webkit-autofill:active {-webkit-transition-delay: 999999…...

CompressO终极指南:免费开源视频图片压缩工具完整使用教程
CompressO终极指南:免费开源视频图片压缩工具完整使用教程 【免费下载链接】compressO Convert any video/image into a tiny size. 100% free & open-source. Available for Mac, Windows & Linux. 项目地址: https://gitcode.com/gh_mirrors/co/compres…...

当FanControl风扇集体“罢工“:从系统诊断到完美修复的技术探险
当FanControl风扇集体"罢工":从系统诊断到完美修复的技术探险 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/G…...

Legacy iOS Kit终极指南:一站式拯救老旧iPhone/iPad的免费工具
Legacy iOS Kit终极指南:一站式拯救老旧iPhone/iPad的免费工具 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to restore/downgrade, save SHSH blobs, jailbreak legacy iOS devices, and more 项目地址: https://gitcode.com/gh_mirrors/le/Legacy-iOS-K…...

5分钟掌握暗黑破坏神2存档编辑:免费Web工具完整指南
5分钟掌握暗黑破坏神2存档编辑:免费Web工具完整指南 【免费下载链接】d2s-editor 项目地址: https://gitcode.com/gh_mirrors/d2/d2s-editor 还在为暗黑破坏神2中反复刷装备而烦恼吗?想快速体验不同职业的build却不想从头练级?d2s-ed…...

二分查找算法:中间值左偏还是右偏?
还记得吗?我们在前面探讨了区间的选择和主循环的停止判断条件,但是没有提到 中间索引位置的计算公式 middle(st, ed)。当区间的长度是奇数时,中间索引只有一个位置 mid (st ed) / 2,而当区间长度是偶数时,中间索引就…...

Python face_recognition 库实战:从环境搭建到人脸特征点检测
1. 环境准备:搭建人脸识别的开发环境 第一次接触人脸识别开发时,最让人头疼的就是环境配置。记得我刚开始用face_recognition库时,光是安装依赖就折腾了大半天。后来才发现,其实只要掌握几个关键步骤,整个过程可以非常…...

深度解析VisualCppRedist AIO:3种核心技术实现Windows运行时组件自动化管理
深度解析VisualCppRedist AIO:3种核心技术实现Windows运行时组件自动化管理 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist VisualCppRedist AIO项目…...

117.YOLOv5/v8数学原理+CSPDarknet架构,CUDA117环境一键部署
摘要 YOLO(You Only Look Once)系列算法是目标检测领域最主流的实时检测框架,其核心思想是将目标检测任务转化为一个端到端的回归问题。 本文从数学原理出发,系统阐述YOLOv5/v8的架构演进与核心机制,并提供一个从数据准备、模型训练到ONNX部署的完整可运行案例。 文章所有…...

如何在JavaScript中快速生成专业的PowerPoint演示文稿
如何在JavaScript中快速生成专业的PowerPoint演示文稿 【免费下载链接】PptxGenJS Build PowerPoint presentations with JavaScript. Works with Node, React, web browsers, and more. 项目地址: https://gitcode.com/gh_mirrors/pp/PptxGenJS PptxGenJS是一个功能强大…...

100+ RPG Maker MV/MZ插件:零代码打造专业级游戏体验的完整指南
100 RPG Maker MV/MZ插件:零代码打造专业级游戏体验的完整指南 【免费下载链接】RPGMakerMV RPGツクールMV、MZで動作するプラグインです。 项目地址: https://gitcode.com/gh_mirrors/rp/RPGMakerMV 你是否曾梦想用RPG Maker制作出媲美商业游戏的视觉效果和…...