【Unity3D赛车游戏】【四】在Unity中添加阿克曼转向,下压力,质心会让汽车更稳定

👨💻个人主页:@元宇宙-秩沅
👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅!
👨💻 本文由 秩沅 原创
👨💻 收录于专栏:Unity游戏demo
⭐🅰️Unity3D赛车游戏⭐
文章目录
- ⭐🅰️Unity3D赛车游戏⭐
- ⭐前言⭐
- 🎶(==A==)车辆优化——阿克曼转向添加
- 😶🌫️认识阿克曼转向
- 😶🌫️区别:
- 😶🌫️关键代码
- 😶🌫️完整代码
- 🎶(==B==)车辆优化——车身持续稳定的优化
- 😶🌫️速度属性实时转换
- 😶🌫️为车子添加下压力
- 😶🌫️质心的添加centerMess
- 😶🌫️轮胎的平滑度的显示
- ⭐🅰️⭐
⭐前言⭐
–
😶🌫️版本: Unity2021
😶🌫️适合人群:Unity初学者
😶🌫️学习目标:3D赛车游戏的基础制作
😶🌫️技能掌握:
🎶(A)车辆优化——阿克曼转向添加
😶🌫️认识阿克曼转向
引用:阿克曼转向是一种现代汽车的转向方式,也是移动机器人的一种运动模式,在汽车转弯的时候,内外轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎
原理图:
_____________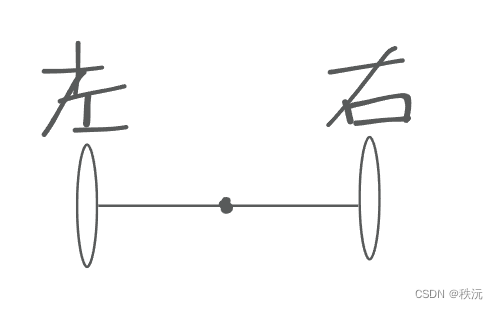
简单理解:一个杆子把左轮和右轮连接起来一起转。
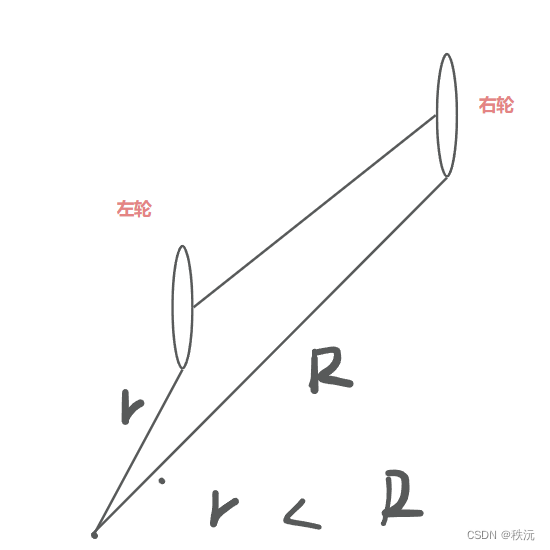
左轮的旋转的半径小于右轮
优点:大大减小了车轮转向需要的空间,转向更加稳定
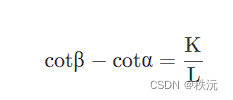
- 阿克曼公式:
β为汽车前外轮转角,α为汽车前内轮转角,K为两主销中心距,L为轴距。
😶🌫️区别:
-
未添加阿克曼转向之前的原理:
通过控制轮子的最大转向范围来转向

-
添加之后
更稳定,机动性更强

😶🌫️关键代码
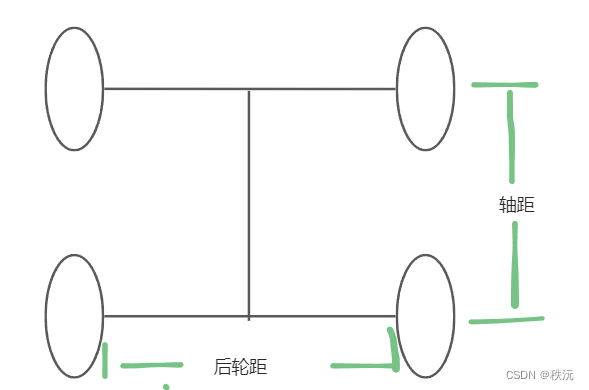
- 后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小
if (horizontal > 0 ) {
//后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * horizontal;} else if (horizontal < 0 ) { wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * horizontal;} else {wheels[0].steerAngle =0;wheels[1].steerAngle =0;}
😶🌫️完整代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 车轮的运动
//___________创建者:_______秩沅________
//_____________________________________
//-------------------------------------//驱动模式的选择
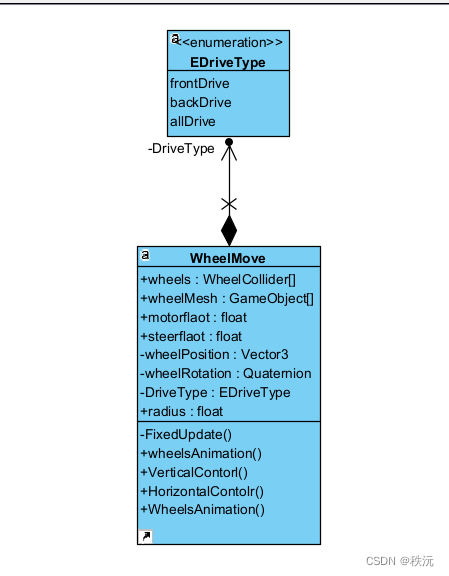
public enum EDriveType
{frontDrive, //前轮驱动backDrive, //后轮驱动allDrive //四驱
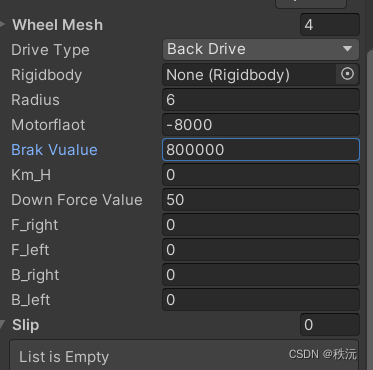
}public class WheelMove : MonoBehaviour
{//-------------------------------------------//四个轮子的碰撞器public WheelCollider[] wheels ;//网格的获取public GameObject[] wheelMesh;//扭矩力度public float motorflaot = 200f;//初始化三维向量和四元数private Vector3 wheelPosition = Vector3.zero;private Quaternion wheelRotation = Quaternion.identity;//-------------------------------------------//驱动模式选择 _默认前驱public EDriveType DriveType = EDriveType.frontDrive;//轮半径public float radius = 0.25f;private void FixedUpdate(){WheelsAnimation(); //车轮动画VerticalContorl(); //驱动管理HorizontalContolr(); //转向管理}//垂直轴方向管理(驱动管理)public void VerticalContorl(){switch (DriveType){case EDriveType.frontDrive: //选择前驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length - 2; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical *(motorflaot / 2); //扭矩马力归半}}break;case EDriveType.backDrive://选择后驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 2; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * (motorflaot / 2); //扭矩马力归半}}break;case EDriveType.allDrive://选择四驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * ( motorflaot / 4 ); //扭矩马力/4}}break;default:break;}}//水平轴方向管理(转向管理)public void HorizontalContolr(){if (InputManager.InputManagerment.horizontal > 0){//后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else if (InputManager.InputManagerment.horizontal < 0){wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else{wheels[0].steerAngle = 0;wheels[1].steerAngle = 0;}}//车轮动画相关public void WheelsAnimation(){for (int i = 0; i < wheels.Length ; i++){//获取当前空间的车轮位置 和 角度wheels[i].GetWorldPose(out wheelPosition, out wheelRotation);//赋值给wheelMesh[i].transform.position = wheelPosition;print(wheelRotation);wheelMesh[i].transform.rotation = wheelRotation * Quaternion .AngleAxis (90,Vector3 .forward );}}
}}}
}🎶(B)车辆优化——车身持续稳定的优化
WheelMove脚本 ——> CarMoveControl脚本 更改脚本名
😶🌫️速度属性实时转换
- 每小时多少公里 和 每秒多少米的对应关系 ——1m/s = 3.6km/h
速度属性建议改成Int类型 ,float类型会上下浮动不准确
//1m/s = 3.6km/hKm_H =(int)(rigidbody.velocity.magnitude * 3.6) ;Km_H = Mathf.Clamp( Km_H,0, 200 ); //油门速度为 0 到 200 Km/H之间- 相机测速 m/s
//相机监测实时速度Control = target.GetComponent<CarMoveControl>();speed = (int )Control.Km_H / 4;speed = Mathf.Clamp(0, 55,speed ); //对应最大200公里每小时
- 添加四个轮子的实时速度,对应虚度属性,可以明显的观察四驱和二驱的汽车动力
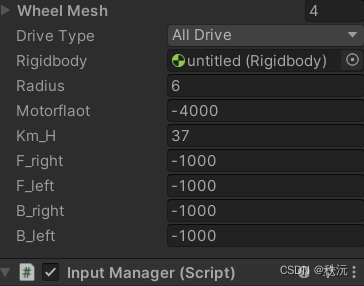
//车辆物理属性相关public void VerticalAttribute(){//1m/s = 3.6km/hKm_H =(int)(rigidbody.velocity.magnitude * 3.6) ;Km_H = Mathf.Clamp( Km_H,0, 200 ); //油门速度为 0 到 200 Km/H之间//显示每个轮胎的扭矩f_right = wheels[0].motorTorque;f_left = wheels[1].motorTorque;b_right = wheels[2].motorTorque;b_left = wheels[3].motorTorque;}
😶🌫️为车子添加下压力
知识百科: 什么是下压力
下压力是车在行进中空气在车体上下流速不一产生的,使空气的总压力指向地面从而增加车的抓地力.
速度越大,下压力越大,抓地更强,越不易翻车

- 关键代码
//-------------下压力添加-----------------//速度越大,下压力越大,抓地更强rigidbody.AddForce(-transform.up * downForceValue * rigidbody.velocity .magnitude );
😶🌫️质心的添加centerMess
知识百科:什么是质心?——质量中心
汽车制造商在设计汽车时会考虑质心的位置和重心高度,以尽可能减小质心侧偏角。 一些高性能汽车甚至会采用主动悬挂系统来控制车身侧倾,从而减小质心侧偏角,提高车辆的稳定性和操控性。
质量中心越贴下,越不容易翻
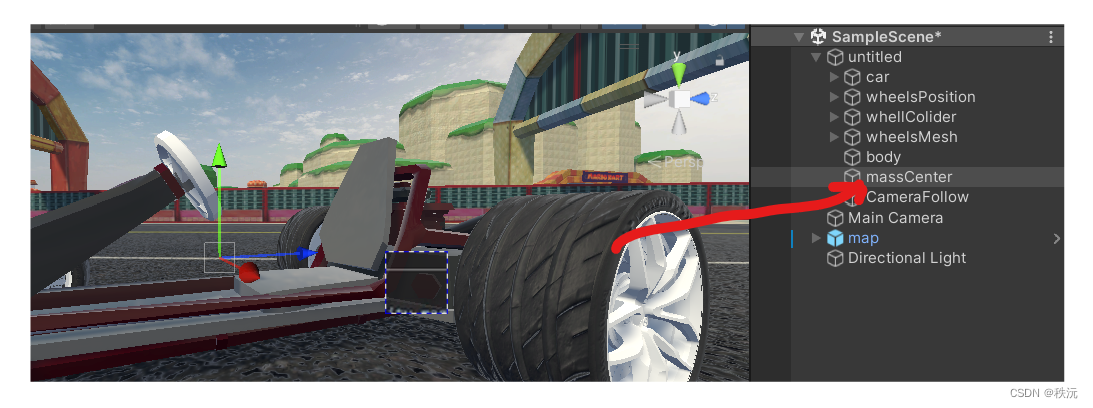
//-------------质量中心同步----------------//质量中心越贴下,越不容易翻rigidbody.centerOfMass = CenterMass;
- 手刹的添加
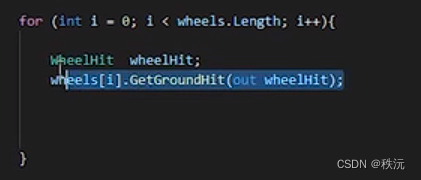
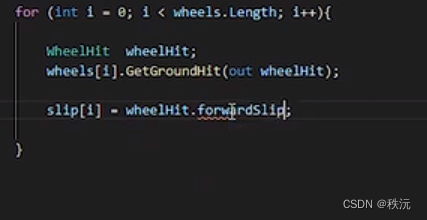
//手刹管理public void HandbrakControl(){if(InputManager.InputManagerment .handbanl ){ //后轮刹车wheels[2].brakeTorque = brakVualue;wheels[3].brakeTorque = brakVualue;}else{wheels[2].brakeTorque = 0;wheels[3].brakeTorque = 0;}}😶🌫️轮胎的平滑度的显示
wheelhit.forwardSlip;用来观看刹车轮胎在滚动方向上打滑。加速滑移为负,制动滑为正
_______
for (int i = 0; i < slip.Length; i++){WheelHit wheelhit;wheels[i].GetGroundHit(out wheelhit);slip[i] = wheelhit.forwardSlip; //轮胎在滚动方向上打滑。加速滑移为负,制动滑为正}
⭐🅰️⭐
⭐【Unityc#专题篇】之c#进阶篇】
⭐【Unityc#专题篇】之c#核心篇】
⭐【Unityc#专题篇】之c#基础篇】
⭐【Unity-c#专题篇】之c#入门篇】
⭐【Unityc#专题篇】—进阶章题单实践练习
⭐【Unityc#专题篇】—基础章题单实践练习
⭐【Unityc#专题篇】—核心章题单实践练习
你们的点赞👍 收藏⭐ 留言📝 关注✅是我持续创作,输出优质内容的最大动力!、

相关文章:
【Unity3D赛车游戏】【四】在Unity中添加阿克曼转向,下压力,质心会让汽车更稳定
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:Uni…...

Python爬虫requests判断请求超时并重新post/get发送请求
在使用Python爬虫中,你可以使用requestsimport requests #Python爬虫requests判断请求超时并重新post发送请求,proxies为代理 def send_request_post(url, data, headers , proxies , max_retries3, timeout5):retries 0while retries < max_retries…...

CSS中如何实现多列布局?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 多列布局(Multi-column Layout)⭐ column-count⭐ column-width⭐ column-gap⭐ column-rule⭐ column-span⭐ 示例⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧…...

【C++】string简单实用详解
本片要分享的内容是有关于string的知识,在这之前得介绍一下什么是STL; 目录 1.STL简单介绍 2. string简单介绍 3.string简单使用 3.1.string的定义 3.2.字符串的拼接 3.3.string的遍历 3.3.1.循环遍历 3.3.2.迭代器遍历 4.string的函数构造 1.…...
opencv 进阶16-基于FAST特征和BRIEF描述符的ORB(图像匹配)
在计算机视觉领域,从图像中提取和匹配特征的能力对于对象识别、图像拼接和相机定位等任务至关重要。实现这一目标的一种流行方法是 ORB(Oriented FAST and Rotated Brief)特征检测器和描述符。ORB 由 Ethan Rublee 等人开发,结合了…...
Unity 类Scene窗口相机控制
类Scene窗口相机控制 🍔效果 🍔效果 传送门👈...
juc基础(三)
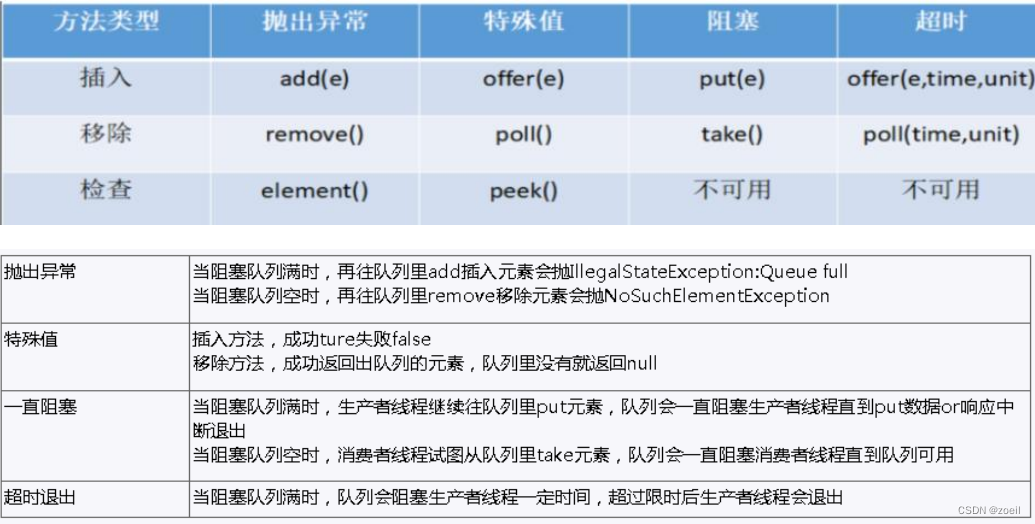
目录 一、读写锁 1、读写锁介绍 2、ReentrantReadWriteLock 3、例子 4、小结 二、阻塞队列 1、BlockingQueue 简介 2、BlockingQueue 核心方法 3、案例 4、常见的 BlockingQueue (1)ArrayBlockingQueue(常用) (2)Li…...
c语言函数指针和指针函数的区别,以及回调函数的使用。
函数指针是什么,函数指针本质也是指针,不过是指向函数的指针,存储的是函数的地址。 指针函数是什么,指针函数其实就是返回值是指针的函数,本质是函数。 函数指针是如何定义的呢,如下 void (*pfun)(int a,int b) 这…...

什么是服务端渲染?前后端分离的优点和缺点?
一.概念 服务端渲染简单点就是服务端直接返回给客户端一个完整的页面,也就是一个完整的html页面,这个页面上已经有数据了。说到这里你可能会觉得后端怎么写页面啊,而且服务端返回页面不是加载更慢吗?错了,因为我们现在…...

【Java】优化重复冗余代码的8种方式
文章目录 前言1. 抽取公用方法2. 抽工具类3. 反射4.泛型5. 继承与多态6.使用设计模式7.自定义注解(或者说AOP面向切面)8.函数式接口和Lambda表达式 前言 日常开发中,我们经常会遇到一些重复代码。大家都知道重复代码不好,它主要有这些缺点:可…...
rabbitmq卸载重新安装3.8版本
卸载之前的版本的rabbitmq 卸载rabbitmq 卸载前先停止rabbitmq服务 /usr/lib/rabbitmq/bin/rabbitmqctl stop查看rabbitmq安装的相关列表 yum list | grep rabbitmq卸载rabbitmq相关内容 yum -y remove rabbitmq-server.noarch 卸载erlang 查看erlang安装的相关列表 …...
MyBatis分页思想和特殊字符
目录 一、MyBatis分页思想 1.1 使用场景 1.2 代码演示 二、MyBatis特殊字符 2.1代码演示 一、MyBatis分页思想 1.1 使用场景 Mybatis分页应用场景: MyBatis是一个Java持久层框架,它提供了一种将SQL查询和结果映射到Java对象的简单方式。分页是MyBa…...
设计模式大白话——命令模式
命令模式 一、概述二、经典举例三、代码示例(Go)四、总结 一、概述 顾名思义,命令模式其实和现实生活中直接下命令的动作类似,怎么理解这个命令是理解命令模式的关键!!!直接说结论是很不负责…...
[线程/C++(11)]线程池
文章目录 一、C实现线程池1. 头文件2. 测试部分 二、C11实现线程池1. 头文件2. 测试部分 一、C实现线程池 1. 头文件 #define _CRT_SECURE_NO_WARNINGS #pragma once #include<iostream> #include<string.h> #include<string> #include<pthread.h> #…...
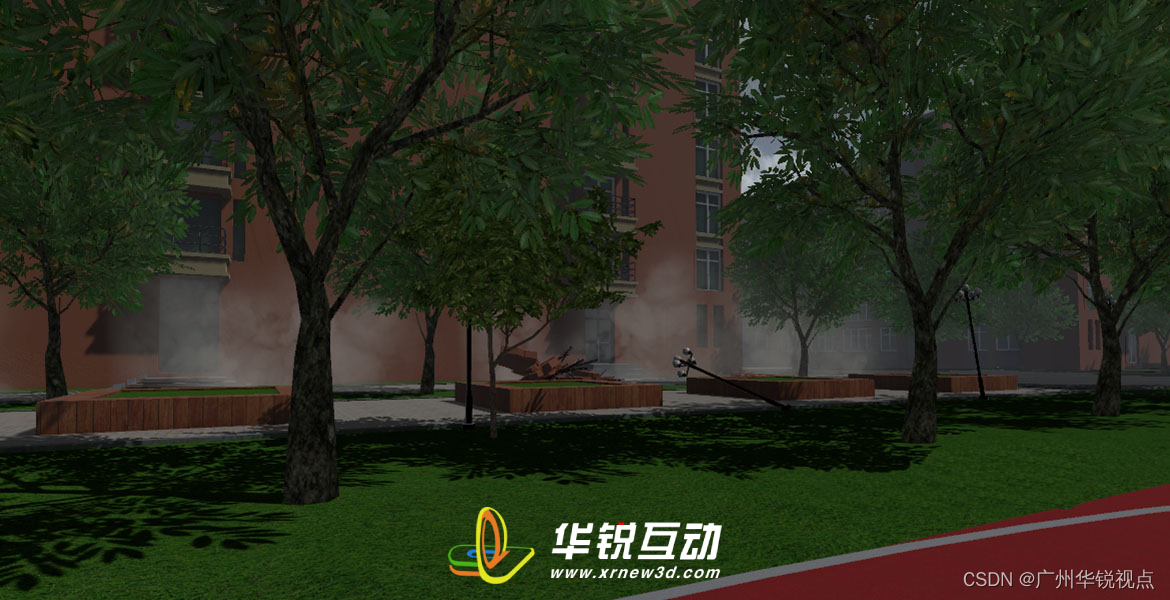
VR防地质灾害安全教育:增强自然灾害知识,提高自我保护意识
VR防地质灾害安全教育系统是一种虚拟仿真技术,可以通过虚拟现实技术模拟地震、泥石流、滑坡等地质灾害的发生和应对过程,帮助人们提高应对突发自然灾害的能力。这种系统的优势在于可以增强自然灾害知识,提高自我保护意识,锻炼人们…...

Mybatis多对多查询案例!
在MyBatis中执行多对多查询需要使用两个主要表和一个连接表(通常称为关联表)来演示。在这个示例中,我们将使用一个示例数据库模型,其中有三个表:students、courses 和 student_courses,它们之间建立了多对多…...
Android OpenCV(七十五): 看看刚”转正“的条形码识别
前言 2021年,我们写过一篇《OpenCV 条码识别 Android 平台实践》,当时的条形码识别模块位于 opencv_contrib 仓库,但是 OpenCV 4.8.0 版本开始, 条形码识别模块已移动到 OpenCV 主仓库,至此我们无需自行编译即可轻松地调用条形码识别能力。 Bar code detector and decoder…...
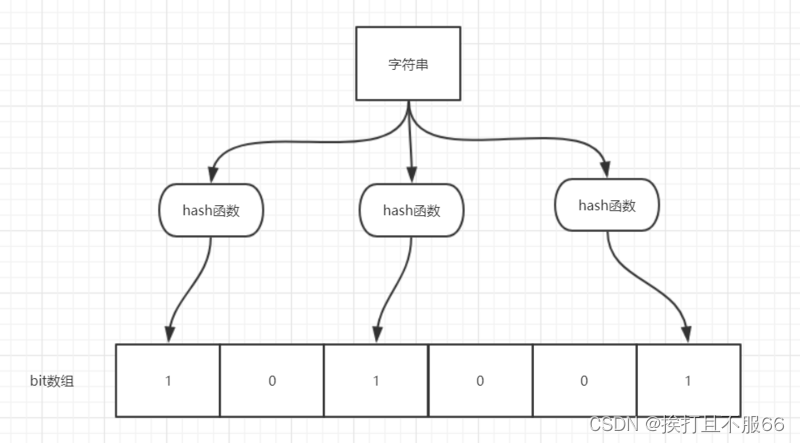
数据结构——布隆计算器
文章目录 1.什么是布隆过滤器?2.布隆过滤器的原理介绍3.布隆过滤器使用场景4.通过 Java 编程手动实现布隆过滤器5.利用Google开源的 Guava中自带的布隆过滤器6.Redis 中的布隆过滤器6.1介绍6.2使用Docker安装6.3常用命令一览6.4实际使用 1.什么是布隆过滤器…...

金融学复习博迪(第6-9章)
第6章 投资项目分析 学习目的:解释资本预算;资本预算基本法则 资本预算过程包含三个基本要素: 一提出针对投资项目的建议 一对这些建议进行评价 一决定接受和拒绝哪些建议 6.1项目分析的特性 资本预算的过程中的基本单位是单个的投资项目。投…...
解决idea登录github copilot报错问题
试了好多方案都没用,但是这个有用, 打开idea-help-edit custonm vm options 然后在这个文件里面输入 -Dcopilot.agent.disabledtrue再打开 https://github.com/settings/copilot 把这个设置成allow,然后重新尝试登录copilot就行就行 解决方…...

Proteus与Keil联调实战:从零搭建智能温控仿真系统
1. 环境准备与工具安装 第一次接触Proteus和Keil联调时,我花了大半天时间在环境配置上。现在回想起来,其实只要按步骤操作,半小时就能搞定所有准备工作。先说说必备的软件清单:Proteus 8.9以上版本、Keil MDK-ARM(记得…...

告别虚拟机卡顿:在Ubuntu 18.04上为ARM板交叉编译Qt5.12.9的完整配置流程
突破虚拟机性能瓶颈:Ubuntu 18.04下高效交叉编译Qt5.12.9的工程实践 当你在40GB磁盘空间的Ubuntu虚拟机上尝试编译Qt5.12.9时,解压后的2.8GB源码目录和漫长的编译等待时间可能已经让你抓狂。这不是个例——嵌入式开发工程师经常面临这样的困境࿱…...

在Hermes Agent中自定义Provider接入Taotoken服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Hermes Agent中自定义Provider接入Taotoken服务 对于使用Hermes Agent进行AI应用开发的团队而言,能够灵活接入不同的…...

手把手教你用UE5 C++为角色添加动态攀爬:支持移动平台与高度自适应
手把手实现UE5动态攀爬系统:移动平台与高度自适应全解析 在当代3A级动作游戏中,角色与环境的动态交互已成为沉浸感的核心要素。想象一个场景:玩家在摇晃的空中浮岛上追逐目标,需要连续攀爬移动中的平台;或是潜入敌方基…...

学习规划需要定期调整吗?
在当今竞争激烈的教育环境中,学习规划对于学生的成长和发展起着至关重要的作用。作为一名在学习规划领域深耕十年的专家,我见证了无数学生在学习规划的指引下取得优异成绩,也看到了一些学生因为规划不合理而走了不少弯路。那么,学…...

告别connect!Qt Creator里用Lambda表达式写信号槽,代码能有多简洁?
Qt Creator中Lambda表达式重构信号槽:极致简洁的现代C实践 在Qt开发中,信号槽机制是GUI编程的核心支柱,但传统connect写法往往导致代码臃肿。当面对大量简单交互逻辑时,频繁声明槽函数和connect调用会让代码库迅速膨胀。Lambda表达…...

新手避坑指南:你的FPGA按键消抖仿真为什么和板子对不上?
FPGA按键消抖实战:从仿真完美到真实失效的深度排查手册 刚接触FPGA开发的工程师常会遇到一个诡异现象:按键消抖模块在ModelSim里跑得风生水起,波形干净漂亮,可一旦下载到开发板就各种失灵——要么按键没反应,要么按一次…...

QGIS工程文件.QGZ与.QGS到底怎么选?从团队协作到版本控制的完整避坑指南
QGIS工程文件.QGZ与.QGS深度对比:团队协作与版本控制的最佳实践 当你在QGIS中完成一天的工作,点击保存按钮时,系统默认会生成.QGZ格式的文件。但你是否想过,这个看似简单的选择可能会影响未来团队协作的效率?在GIS项目…...

CGI Studio 3.11:AI驱动与安全合规的嵌入式HMI开发平台解析
1. 项目概述:为什么我们需要CGI Studio这样的HMI设计工具?在嵌入式系统开发领域,尤其是在汽车、工业和高端家电行业,图形用户界面的复杂度和美观度要求正以前所未有的速度提升。十年前,一个简单的单色LCD屏幕配上几个按…...

RAMba架构:RNN与稀疏注意力融合优化长文本处理
1. RAMba架构:RNN与稀疏注意力的创新融合在自然语言处理领域,处理长文本序列一直是个棘手的问题。传统Transformer架构虽然性能强大,但其注意力机制的计算复杂度与序列长度呈平方关系增长,这严重限制了模型处理长文本的能力。RAMb…...