基于YOLOV8模型和Kitti数据集的人工智能驾驶目标检测系统(PyTorch+Pyside6+YOLOv8模型)
摘要:基于YOLOV8模型和Kitti数据集的人工智能驾驶目标检测系统可用于日常生活中检测与定位车辆、汽车等目标,利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外本系统还支持图片、视频等格式的结果可视化与结果导出。本系统采用YOLOv8目标检测算法训练数据集,使用Pysdie6库来搭建前端页面展示系统。另外本系统支持的功能还包括训练模型的导入、初始化;检测置信分与检测后处理IOU阈值的调节;图像的上传、检测、可视化结果展示与检测结果导出;视频的上传、检测、可视化结果展示与检测结果导出;摄像头的图像输入、检测与可视化结果展示;已检测目标个数与列表、位置信息;前向推理用时等功能。本博文提供了完整的Python代码与安装和使用教程,适合新入门的朋友参考,部分重要代码部分都有注释,完整代码资源文件请转至文末的下载链接。

需要源码的朋友在后台私信博主获取下载链接
基本介绍
近年来,机器学习和深度学习取得了较大的发展,深度学习方法在检测精度和速度方面与传统方法相比表现出更良好的性能。YOLOv8 是 Ultralytics 公司继 YOLOv5 算法之后开发的下一代算法模型,目前支持图像分类、物体检测和实例分割任务。YOLOv8 是一个 SOTA模型,它建立在之前YOLO 系列模型的成功基础上,并引入了新的功能和改进,以进一步提升性能和灵活性。具体创新包括:一个新的骨干网络、一个新的 Ancher-Free 检测头和一个新的损失函数,可以在从 CPU 到 GPU 的各种硬件平台上运行。因此本博文利用YOLOv8目标检测算法实现一种基于YOLOV8模型和Kitti数据集的人工智能驾驶目标检测系统,再使用Pyside6库搭建出界面系统,完成目标检测页面的开发。本博主之前发布过关于YOLOv5算法的相关模型与界面,需要的朋友可从我之前发布的博客查看。另外本博主计划将YOLOv5、YOLOv6、YOLOv7和YOLOv8一起联合发布,需要的朋友可以持续关注,欢迎朋友们关注收藏。
环境搭建
(1)打开项目目录,在搜索框内输入cmd打开终端

(2)新建一个虚拟环境(conda create -n yolo8 python=3.8)

(3)激活环境,安装ultralytics库(yolov8官方库),pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple

(4)注意到这种安装方式只会安装cpu版torch,如需安装gpu版torch,需在安装包之前先安装torch:pip install torch2.0.1+cu118 torchvision0.15.2+cu118 -f https://download.pytorch.org/whl/torch_stable.html;再,pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple

(5)安装图形化界面库pyside6:pip install pyside6 -i https://pypi.tuna.tsinghua.edu.cn/simple
界面及功能展示
下面给出本博文设计的软件界面,整体界面简洁大方,大体功能包括训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;已检测目标列表、位置信息;前向推理用时。初始界面如下图:

模型选择与初始化
用户可以点击模型权重选择按钮上传训练好的模型权重,训练权重格式可为.pt、.onnx以及engine等,之后再点击模型权重初始化按钮可实现已选择模型初始化的配置。

置信分与IOU的改变
在Confidence或IOU下方的输入框中改变值即可同步改变滑动条的进度,同时改变滑动条的进度值也可同步改变输入框的值;Confidence或IOU值的改变将同步到模型里的配置,将改变检测置信度阈值与IOU阈值。
图像选择、检测与导出
用户可以点击选择图像按钮上传单张图像进行检测与识别,上传成功后系统界面会同步显示输入图像。

再点击图像检测按钮可完成输入图像的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

再点击检测结果展示按钮可在系统左下方显示输入图像检测的结果,系统将显示识别出图片中的目标的类别、位置和置信度信息。

点击图像检测结果导出按钮即可导出检测后的图像,在保存栏里输入保存的图片名称及后缀即可实现检测结果图像的保存。

点击结束图像检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频,或者点击打开摄像头按钮来开启摄像头。
视频选择、检测与导出
用户点击选择视频按钮上传视频进行检测与识别,之后系统会将视频的第一帧输入到系统界面中显示。

再点击视频检测按钮可完成输入视频的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击暂停视频检测按钮即可实现输入视频的暂停,此时按钮变为继续视频检测,输入视频帧与帧检测结果会保留在系统界面,可点击下拉目标框选择已检测目标的坐标位置信息,再点击继续视频检测按钮即可实现输入视频的检测。
点击视频检测结果导出按钮即可导出检测后的视频,在保存栏里输入保存的图片名称及后缀即可实现检测结果视频的保存。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频,或者点击打开摄像头按钮来开启摄像头。
摄像头打开、检测与结束
用户可以点击打开摄像头按钮来打开摄像头设备进行检测与识别,之后系统会将摄像头图像输入到系统界面中显示。

再点击摄像头检测按钮可完成输入摄像头的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频,或者点击打开摄像头按钮来开启摄像头。
算法原理介绍
本系统采用了基于深度学习的单阶段目标检测算法YOLOv8,相较于之前的YOLO系列目标检测算法,YOLOv8目标检测算法具有如下的几点优势:(1)更友好的安装/运行方式;(2)速度更快、准确率更高;(3)新的backbone,将YOLOv5中的C3更换为C2F;(4)YOLO系列第一次尝试使用anchor-free;(5)新的损失函数。YOLOv8模型的整体结构如下图所示,原图见mmyolo的官方仓库。

YOLOv8与YOLOv5模型最明显的差异是使用C2F模块替换了原来的C3模块,两个模块的结构如下图所示,原图见mmyolo的官方仓库。

另外Head 部分变化最大,从原先的耦合头变成了解耦头,并且从 YOLOv5 的 Anchor-Based 变成了 Anchor-Free。其结构对比如下图所示。

数据集介绍
本系统使用的Kitti数据集标注了行人(Pedestrian)、面包车(Van)、坐着的人(Person Sitting)、汽车(Car)、卡车(Truck)、骑自行车的人(Cyclist)、有轨电车(Tram)以及其他目标(Misc)这八个类别,数据集总计7481张图片。该数据集中类别都有大量的旋转和不同的光照条件,有助于训练出更加鲁棒的检测模型。本文实验的Kitti检测识别数据集包含训练集6000张图片,验证集1481张图片,选取部分数据部分样本数据集如下图所示。由于YOLOv5算法对输入图片大小有限制,需要将所有图片调整为相同的大小。为了在不影响检测精度的情况下尽可能减小图片的失真,我们将所有图片调整为640x640的大小,并保持原有的宽高比例。此外,为了增强模型的泛化能力和鲁棒性,我们还使用了数据增强技术,包括随机旋转、缩放、裁剪和颜色变换等,以扩充数据集并减少过拟合风险。

关键代码解析
在训练阶段,我们使用了预训练模型作为初始模型进行训练,然后通过多次迭代优化网络参数,以达到更好的检测性能。在训练过程中,我们采用了学习率衰减和数据增强等技术,以增强模型的泛化能力和鲁棒性。一个简单的单卡模型训练命令如下。

在训练时也可指定更多的参数,大部分重要的参数如下所示:

在测试阶段,我们使用了训练好的模型来对新的图片和视频进行检测。通过设置阈值,将置信度低于阈值的检测框过滤掉,最终得到检测结果。同时,我们还可以将检测结果保存为图片或视频格式,以便进行后续分析和应用。本系统基于YOLOv8算法,使用PyTorch实现。代码中用到的主要库包括PyTorch、NumPy、OpenCV、Pyside6等。

Pyside6界面设计
PySide是一个Python的图形化界面(GUI)库,由C++版的Qt开发而来,在用法上基本与C++版没有特别大的差异。相对于其他Python GUI库来说,PySide开发较快,功能更完善,而且文档支持更好。在本博文中,我们使用Pyside6库创建一个图形化界面,为用户提供简单易用的交互界面,实现用户选择图片、视频进行目标检测。
我们使用Qt Designer设计图形界面,然后使用Pyside6将设计好的UI文件转换为Python代码。图形界面中包含多个UI控件,例如:标签、按钮、文本框、多选框等。通过Pyside6中的信号槽机制,可以使得UI控件与程序逻辑代码相互连接。
实验结果与分析
在实验结果与分析部分,我们使用精度和召回率等指标来评估模型的性能,还通过损失曲线和PR曲线来分析训练过程。在训练阶段,我们使用了前面介绍的数据集进行训练,使用了YOLOv8算法对数据集训练,总计训练了100个epochs。在训练过程中,我们使用tensorboard记录了模型在训练集和验证集上的损失曲线。从下图可以看出,随着训练次数的增加,模型的训练损失和验证损失都逐渐降低,说明模型不断地学习到更加精准的特征。在训练结束后,我们使用模型在数据集的验证集上进行了评估,得到了以下结果。

下图展示了我们训练的YOLOv8模型在验证集上的PR曲线,从图中可以看出,模型取得了较高的召回率和精确率,整体表现良好。

下图展示了本博文在使用YOLOv8模型对数据集进行训练时候的Mosaic数据增强图像。

综上,本博文训练得到的YOLOv8模型在数据集上表现良好,具有较高的检测精度和鲁棒性,可以在实际场景中应用。另外本博主对整个系统进行了详细测试,最终开发出一版流畅的高精度目标检测系统界面,就是本博文演示部分的展示,完整的UI界面、测试图片视频、代码文件等均已打包上传,感兴趣的朋友可以关注我私信获取。
其他基于深度学习的目标检测系统如西红柿、猫狗、山羊、野生目标、烟头、二维码、头盔、交警、野生动物、野外烟雾、人体摔倒识别、红外行人、家禽猪、苹果、推土机、蜜蜂、打电话、鸽子、足球、奶牛、人脸口罩、安全背心、烟雾检测系统等有需要的朋友关注我,从博主其他视频中获取下载链接。
完整项目目录如下所示:

相关文章:
基于YOLOV8模型和Kitti数据集的人工智能驾驶目标检测系统(PyTorch+Pyside6+YOLOv8模型)
摘要:基于YOLOV8模型和Kitti数据集的人工智能驾驶目标检测系统可用于日常生活中检测与定位车辆、汽车等目标,利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外本系统还支持图片、视频等格式的结果可视化与结果导出。本系统采用…...
基于Android的课程教学互动系统 微信小程序uniapp
教学互动是学校针对学生必不可少的一个部分。在学校发展的整个过程中,教学互动担负着最重要的角色。为满足如今日益复杂的管理需求,各类教学互动程序也在不断改进。本课题所设计的springboot基于Android的教学互动系统,使用SpringBoot框架&am…...
OpenCV基础知识(9)— 视频处理(读取并显示摄像头视频、播放视频文件、保存视频文件等)
前言:Hello大家好,我是小哥谈。OpenCV不仅能够处理图像,还能够处理视频。视频是由大量的图像构成的,这些图像是以固定的时间间隔从视频中获取的。这样,就能够使用图像处理的方法对这些图像进行处理,进而达到…...

PostgreSQL命令行工具psql常用命令
1. 概述 通常情况下操作数据库使用图形化客户端工具,在实际工作中,生产环境是不允许直接连接数据库主机,只能在跳板机上登录到Linux服务器才能连接数据库服务器,此时就需要使用到命令行工具。psql是PostgreSQL中的一个命令行交互…...
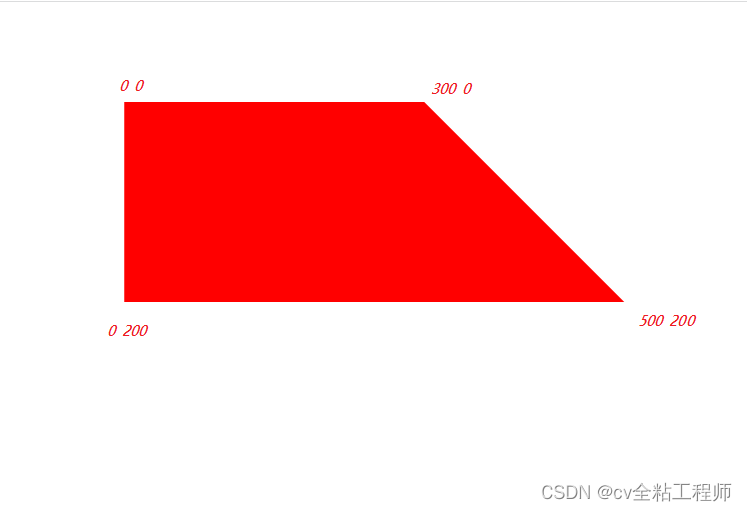
【CSS 画个梯形】
使用clip-path: polygon画梯形 clip-path: polygon使用方式如下: 效果实现 clip-path: polygon 是CSS的属性之一,用于裁剪元素的形状。它可以通过定义一个具有多边形顶点坐标的值来创建一个多边形的裁剪区域,从而实现元素的非矩形裁剪效果。…...

Spring Data Redis
文章目录 Redis各种Java客户端Spring Data Redis使用方式操作字符串类型的数据操作哈希类型数据列表类型集合类型有序集合类型通用类型 Redis各种Java客户端 Java中如何操作redis,这里主讲IDEA中的框架Spring Data Redis来操作redis Jedis是官方推出的,…...

软件测试的方法有哪些?
软件测试 根据利用的被测对象信息的不同,可以将软件测试方法分为:黑盒测试、灰盒测试、白盒测试。 1、白盒测试 1)概念:是依据被测软件分析程序内部构造,并根据内部构造分析用例,来对内部控制流程进行测试…...
Qt Designer)
Python Qt学习(二)Qt Designer
一开始以为Designer是个IDE,多番尝试之后,发现,是个UI设计工具,并不能在其中直接添加代码。保存之后,会生成一个后缀是UI的文件,再用pyuic5.exe将ui文件转化成py文件。pyuic5 -o 目标py文件 源ui文件...
)
我的数据上传类操作(以webDAV为例)
在登录处进行初始化: 1.读取配置 GModel.ServerSetin JsonToIni.GetClass<ServerSet>(ConfigFiles.ConfigFile);if (!string.IsNullOrWhiteSpace(GModel.ServerSetin.FTPUser)){OPCommon.NetControls.NetworkShareConnect.connectToShare(GModel.ServerSeti…...

move与函数指针的简单使用
std::move() C11的标准库 提供了一个非常有用的函数 std::move(),std::move() 函数将一个左值强制转化为右值引用,以用于移动语义。 就是说 std::move(str); 之后原来的值因为变成了右值失效了 但是这样赋值可以避免出现拷贝 #include <iostream&g…...
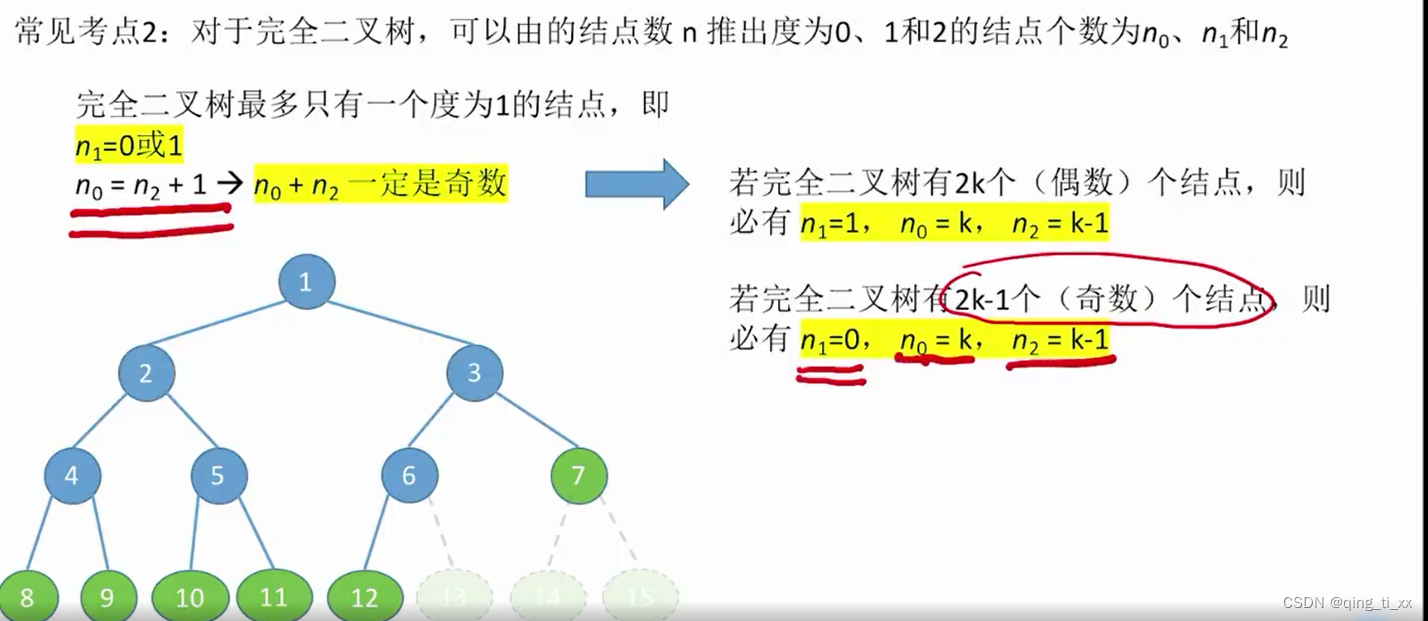
第五章 树与二叉树 二、二叉树的定义和常考考点
一、定义 二叉树可以用以下方式详细定义: 二叉树是由节点构成的树形结构,每个节点最多可以有两个子节点。每个节点有以下几个属性: 值:存储该节点的数据。左子节点:有一个左子节点,如果没有则为空。右子节…...

算法笔记/USACO Guide GOLD金组DP 1. Introduction to DP
USACO Guide中金组的内容分为一下六个章节 DP数学图论数据结构树一些附加主题 今天学习DP,以下内容: 初入DP背包DP图表中的路线最长递增序列状态压缩DP区间DP数位DP 初入DP Dynamic Programming (DP) is an important algorithmic technique in Comp…...

天锐绿盾安全U盘系统
安全U盘系统 01 简介 天锐绿盾安全U盘系统,是一款致力于保障U盘数据内容安全的产品。通过严格身份认证、便捷安全的密保机制、智能的U盘锁定或自毁设置、详细的文件操作日志、文件粉碎、设置还原等,天锐绿盾安全U盘系统为您U盘的数据保驾护航࿰…...

灰色预测模型
当谈论灰色预测时,通常是指灰色系统理论,它是一种用于处理少量数据或缺乏充分信息的情况下进行预测和分析的数学方法。灰色预测的核心思想是通过建立灰色模型来分析和预测数据的变化趋势。 我会解释灰色预测的基本原理、步骤和方法: 1. 灰色…...
Yolo系列-yolov1
YOLO-V1 经典的one-stage方法 YouOnlyLookOnce,名字就已经说明了一切!把检测问题转化成回归问题,一个CNN就搞定了!可以对视频进行实时检测,应用领域非常广! 核心思想: Yolov1的核心思想是将对象…...
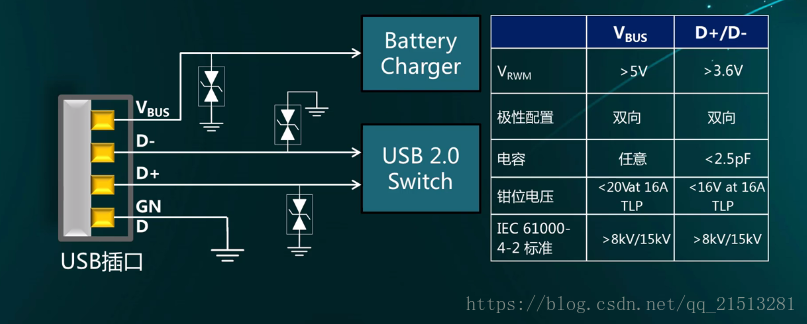
单片机TVS/ESD二极管防护
TVS 瞬态电压抑制二极管Transient Voltage Suppressor ESD 静电释放二极管 Electro-Static discharge 这两种本质上都是二极管。都是利用了二极管正向导通、反向截止的特性。二极管在反向截止截止条件下,如果电压继续增大,将会引发雪崩,使得…...

TCP协议的重点知识点
TCP协议的重点知识点 TCP(传输控制协议)是一种面向连接、可靠的数据传输协议,工作在传输层,提供可靠的字节流服务。它是互联网协议栈中最重要、最复杂的协议之一,也是面试中常被问到的知识点。本文将详细介绍TCP协议的各个重要概念。 TCP基本特性 TCP主要具有以下基本特性: …...

大数据——一文熟悉HBase
1、HBase是什么 HBase是基于HDFS的数据存储,它建立在HDFS文件系统上面,利用了HDFS的容错能力,内部还有哈希表并利用索引,可以快速对HDFS上的数据进行随时读写功能。 Hadoop在已经有一个HiveMapReduce结构的数据读写功能&#x…...
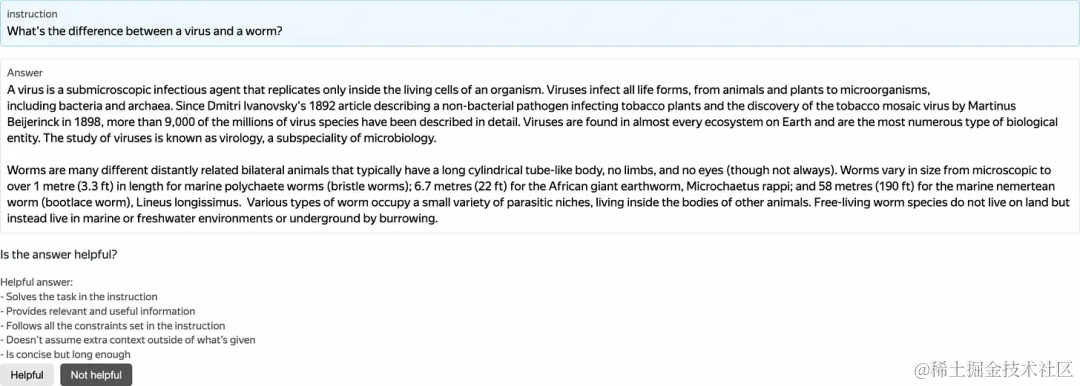
如何有效进行RLHF的数据标注?
编者按:随着大语言模型在自然语言处理领域的广泛应用,如何从人类反馈进行强化学习(RLHF)已成为一个重要的技术挑战。并且RLHF需要大量高质量的人工数据标注,这是一个非常费力的过程。 本文作者在数据标注领域具有丰富经…...
2023年8月22日OpenAI推出了革命性更新:ChatGPT-3.5 Turbo微调和API更新,为您的业务量身打造AI模型
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...

无需联网!Win11 本地 AI 工具 OpenClaw 部署详解
前言 OpenClaw(小龙虾 AI)作为 2026 年备受关注的本地 AI 自动化工具,全程无需依赖网络与云端账号,通过自然语言指令就能完成电脑操作自动化处理,有效提升日常办公与文件管理效率。 安装前重要提醒(必看&a…...

WechatDecrypt:3步快速解密微信聊天记录的终极指南
WechatDecrypt:3步快速解密微信聊天记录的终极指南 【免费下载链接】WechatDecrypt 微信消息解密工具 项目地址: https://gitcode.com/gh_mirrors/we/WechatDecrypt 还在为无法查看加密的微信聊天记录而烦恼吗?WechatDecrypt是一款专业的微信消息…...

TTS听觉校对法:技术写作质量提升的工程实践指南
1. 为什么我们需要“听”自己的文字:一个被忽视的校对革命作为一名写了十几年技术文档和博客的老兵,我敢说,最让我头疼的不是构思,也不是码字,而是最后那一步——校对。你肯定也经历过:一封精心撰写的邮件发…...
:深入剖析启动文件与BOOT模式)
【STM32F407启动探秘】从复位向量到main():深入剖析启动文件与BOOT模式
1. STM32F407启动过程全景图 当你按下STM32F407开发板的电源按钮时,芯片内部就像被施了魔法一样开始运转。这个看似简单的上电过程,实际上隐藏着一套精密的启动机制。作为开发者,理解这个过程就像掌握了一把打开STM32内核奥秘的钥匙。 我刚开…...

从零上手Dialog SmartSnippets:Studio与Toolbox核心功能实战解析
1. 初识Dialog SmartSnippets开发套件 第一次拿到DA1469x开发板时,我完全被它的低功耗特性吸引住了。但真正开始开发时才发现,Dialog提供的这套SmartSnippets开发工具才是真正的宝藏。SmartSnippets Studio和Toolbox就像开发者的左右手,一个负…...

独立开发者如何用AI验证创业点子:15分钟完成市场分析与风险评估
1. 项目概述:一个为独立开发者打造的AI创业点子验证伙伴如果你和我一样,是个喜欢自己动手鼓捣点东西的独立开发者,那你肯定也经历过这个阶段:脑子里冒出一个自认为绝妙的点子,兴奋地花上几周甚至几个月把它做出来&…...
)
从《飞机大战》项目倒推环境搭建:手把手教你为Python 3.8+配置Pygame开发环境(Windows版)
从《飞机大战》项目倒推环境搭建:手把手教你为Python 3.8配置Pygame开发环境(Windows版) 当你决定用Python开发一个《飞机大战》游戏时,第一步不是急着写代码,而是搭建一个能跑起来的环境。这就像盖房子前要先打地基—…...

RPGMZ 万能通用钩子代码 插入自己的代码逻辑
const prevUpdate SceneManager._scene.update; SceneManager._scene.update function() {prevUpdate.call(this); // 保留原版// 你的任意代码SceneManager._scene.update prevUpdate; // 用完归还 };例子1 消息框对话 如何插入自己的对话内容const prevUpdate SceneMan…...

基于Vue.js与AI对话的智能思维导图生成器开发实践
1. 项目概述:一个能“对话”的思维导图生成器最近在整理项目文档和梳理学习笔记时,我总感觉传统的思维导图工具少了点什么。要么是手动拖拽节点太繁琐,打断了思考的连贯性;要么是生成的导图结构僵化,难以体现思考的动态…...

Linux df 命令深度解析:从磁盘空间监控到 inode 耗尽排查
服务器磁盘满了,SSH 登录都报错 No space left on device。第一反应就是敲 df -h,但有时候明明显示还有空间,却还是报错——这是 inode 耗尽了。深入了解 df 命令后,发现这个看似简单的工具其实藏着不少门道。 df 的底层实现&…...