AI助力智能安检,基于图像目标检测实现危险品X光智能安全检测系统
基于AI相关的技术来对一些重复性的但是又比较重要的工作来做智能化助力是一个非常有潜力的场景,关于这方面的项目开发实践在我之前的文章中也有不少的实践,感兴趣的话可以自行移步阅读即可:
《AI助力智能安检,基于目标检测模型实现X光安检图像智能检测分析》
《基于轻量级YOLO模型的X光安检场景下危险物品检测系统》
智能安检相关的任务大都是基于X光数据进行的,基于X光相关的其他类型的项目还有一些,感兴趣的话自行阅读即可:
《基于YOLOv5开发构建手部X光骨骼检测识别分析系统》
《基于轻量级yolov5的手部X光骨骼实例分割检测识别分析系统》
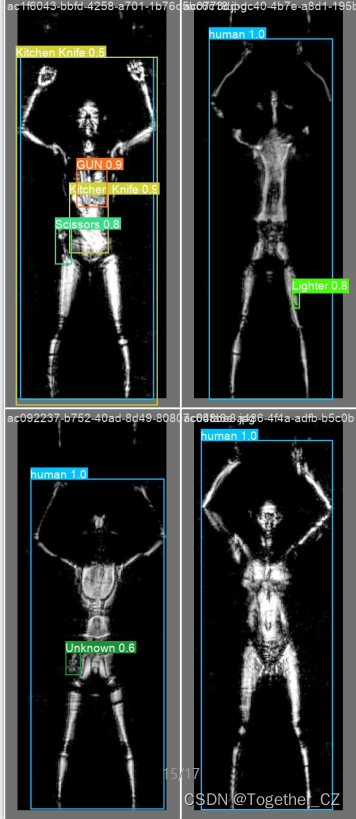
本文的主要落脚点在X光智能安检,前面虽然也有这块的项目实践,但是大都是基于行李的安检图像数据进行的,这里的主要研究对象是人,也就是说核心的目的是行人携带的或者是夹带的各种可能存在危险的物品进行智能化的检测识别,首先看下效果图:

接下来简单看下数据集:

可以看到:实验设定所用到的数据集来源于真实场景单人拍摄的数据。
考虑到实际项目使用过程中所需要的精度和时效性问题,这里模型的主要选型考虑再n、s和m这三款中进行选择,希望达到的是在精度达到指标的情况下尽可能更加轻量化。
整套项目基于v7.0代码开发实现,这里时间比较充裕,所以n、s和m三款不同参数量级的模型我都开发实现了。接下来我们依次看下:
【yolov5n】
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters
nc: 13 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
【yolov5s】
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters
nc: 13 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
【yolov5m】
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters
nc: 13 # number of classes
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
训练完成后,为了直观对比分析不同量级模型的性能差异,这里对其进行整体对比可视化,如下所示:
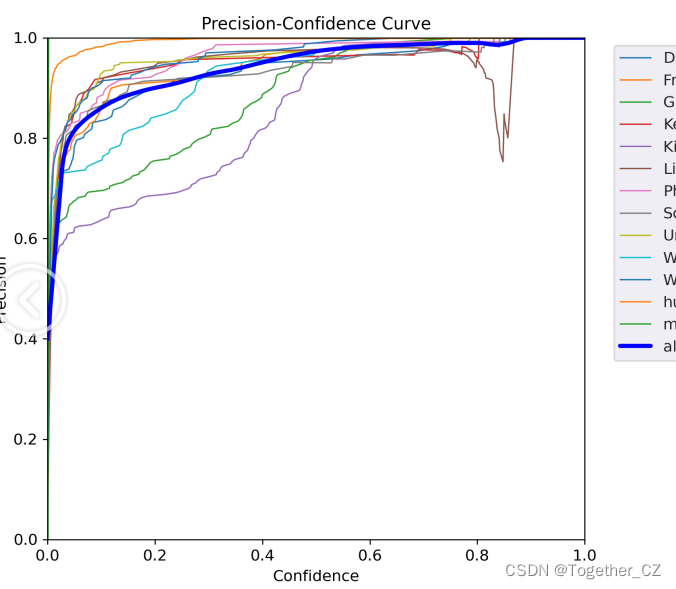
【Precision曲线】
精确率曲线(Precision-Recall Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

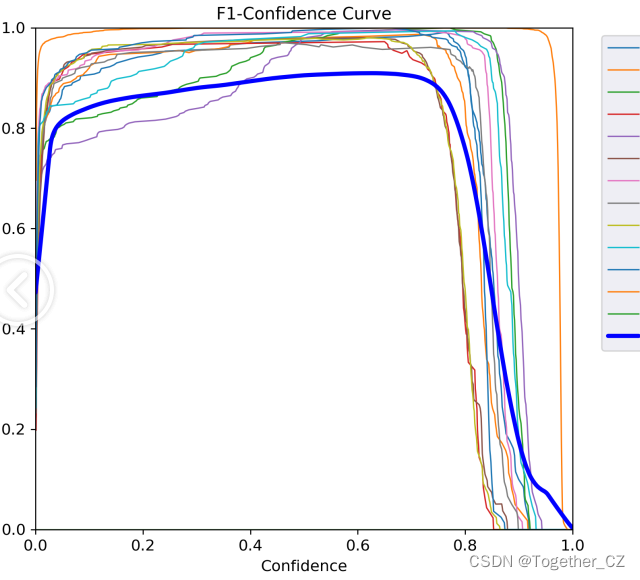
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。

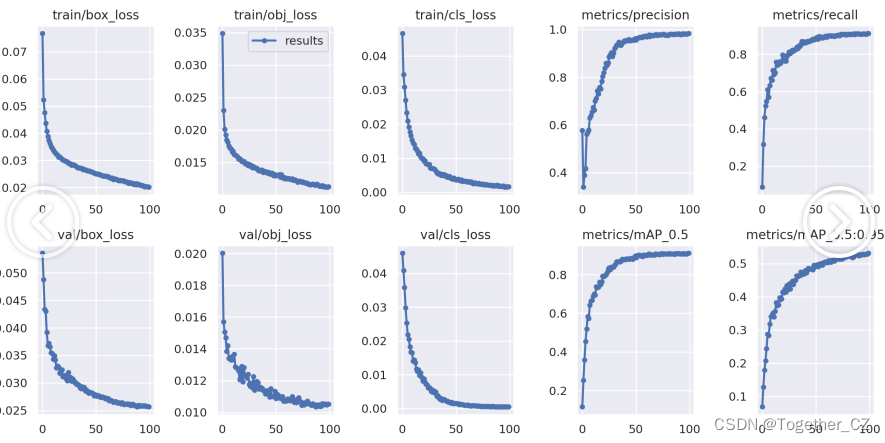
【loss对比曲线】

整体来看不难发现:n系列模型效果最低,m系列模型效果最优,s系列模型兼顾了精度和速度,在实测分析场景下最终选用的也是s系列的模型,后续还可以对其进行进一步的剪枝处理达到进一步精简参数量的目的。
这里我们以最终选定的yolov5s模型为例,看下对应模型的结果详情:
【混淆矩阵】

【F1值】
【精确率曲线】
【PR曲线】

【召回率曲线】

【整体训练过程可视化】
【Batch计算实例】
因为我这里资源限制,所以设定的训练使用的batch-size都是比较小的。
相关文章:
AI助力智能安检,基于图像目标检测实现危险品X光智能安全检测系统
基于AI相关的技术来对一些重复性的但是又比较重要的工作来做智能化助力是一个非常有潜力的场景,关于这方面的项目开发实践在我之前的文章中也有不少的实践,感兴趣的话可以自行移步阅读即可:《AI助力智能安检,基于目标检测模型实现…...

开源软件的崛起:历史与未来
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...

apk 静默安装
apk 静默安装 - 欧颜柳 - 博客园 (cnblogs.com) 如果需要应用进行静默安装,则需要满足一下两个条件 1 必须添加权限 <uses-permission android:name"android.permission.INSTALL_PACKAGES" /> 2 必须是系统应用,或者系统签名应用 方法…...

Unity记录4.2-存储-从json文件获取Tile路径
文章首发见博客:https://mwhls.top/4813.html。 无图/格式错误/后续更新请见首发页。 更多更新请到mwhls.top查看 欢迎留言提问或批评建议,私信不回。 汇总:Unity 记录 摘要:从json文件获取Tile材质路径。 确定保存方案-2023/08/1…...
vue3页面传参?
...

NB水表和LoRa水表有哪些不同之处?
NB水表和LoRa水表是两种目前市场上常见的智能水表,它们在功能、性能、应用场景等方面存在一些不同之处。 一、技术方面 NB水表采用NB-IoT技术,而LoRa水表采用LoRa技术。NB-IoT技术是窄带物联网技术,它具有良好的低功耗、低成本、高覆盖、高可…...
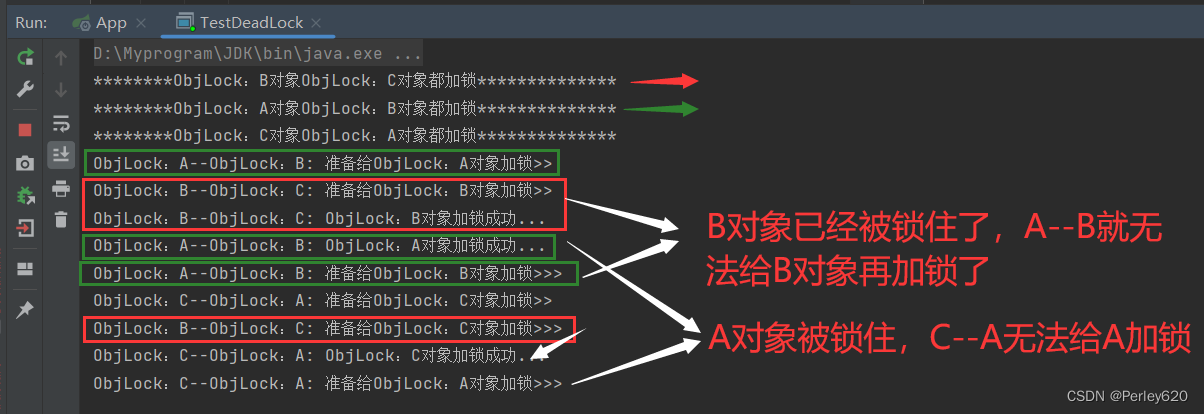
Java进阶(6)——抢购问题中的数据不安全(非原子性问题) Java中的synchronize和ReentrantLock锁使用 死锁及其产生的条件
目录 引出场景:大量请求拥挤抢购事务的基本特征ACID线程安全的基本特征 加锁(java)synchronized锁ReentrantLock锁什么是可重入锁?如何保证可重入 滥用锁的代价?(死锁)死锁的四个必要条件死锁的案例 总结 引出 1.大量请…...

SpringBoot初级开发--加入Log4j进行日志管理打印(6)
日志记录在整个java工程开发中占着很重要的比重,因为很多问题的排查需要通过日志分析才能确认。在SpringBoot中我用得最多的就是log4j这个日志框架。接下来我们具体配置log4j. log4j定义了8个级别的log(除去OFF和ALL,可以说分为6个级别&#…...

计算机竞赛 基于GRU的 电影评论情感分析 - python 深度学习 情感分类
文章目录 1 前言1.1 项目介绍 2 情感分类介绍3 数据集4 实现4.1 数据预处理4.2 构建网络4.3 训练模型4.4 模型评估4.5 模型预测 5 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于GRU的 电影评论情感分析 该项目较为新颖,适合作为竞…...
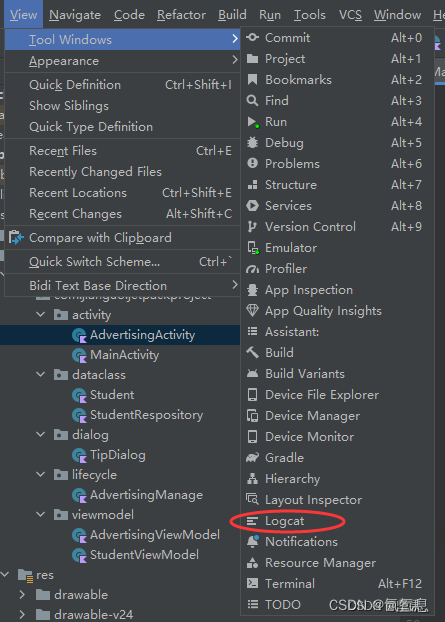
android logcat问题 怎么换成旧版
参考 如果想切换回旧版LOGCAT,按照下方步骤设置即可 File->Settings->Expermental->Logcat->Enable new Logcat tool window:取消勾选 设置好后上方会有一个Toast,询问你是否使用新版logcat,关掉即可 最新测试版移…...

监听的用法watch
1、当想停止某页面定时刷新(监听路由的变化) /**组件被移除时调用 */deactivated() {clearInterval(this.timer);this.timer null;},/**监听路由变化是否刷新 */watch: {// 方法1 //监听路由是否变化$route(to, from) {if (to.name "xxx") {…...
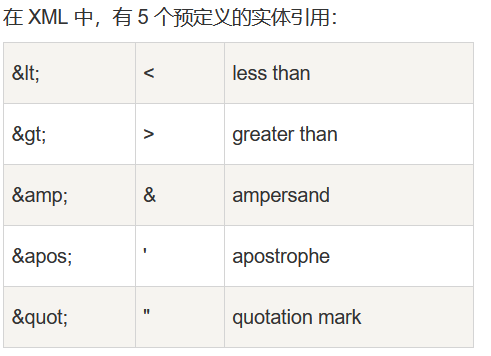
XML—标记语言
什么是XML? Extensible Markup Language,可扩展标记语言。 那标记语言是什么? 用文字做标记表达一些效果或携带一些数据。比如:HTML、XML 我的理解:用倾盆大雨表达雨很大 那XML为什么说是可扩展的呢? 还…...
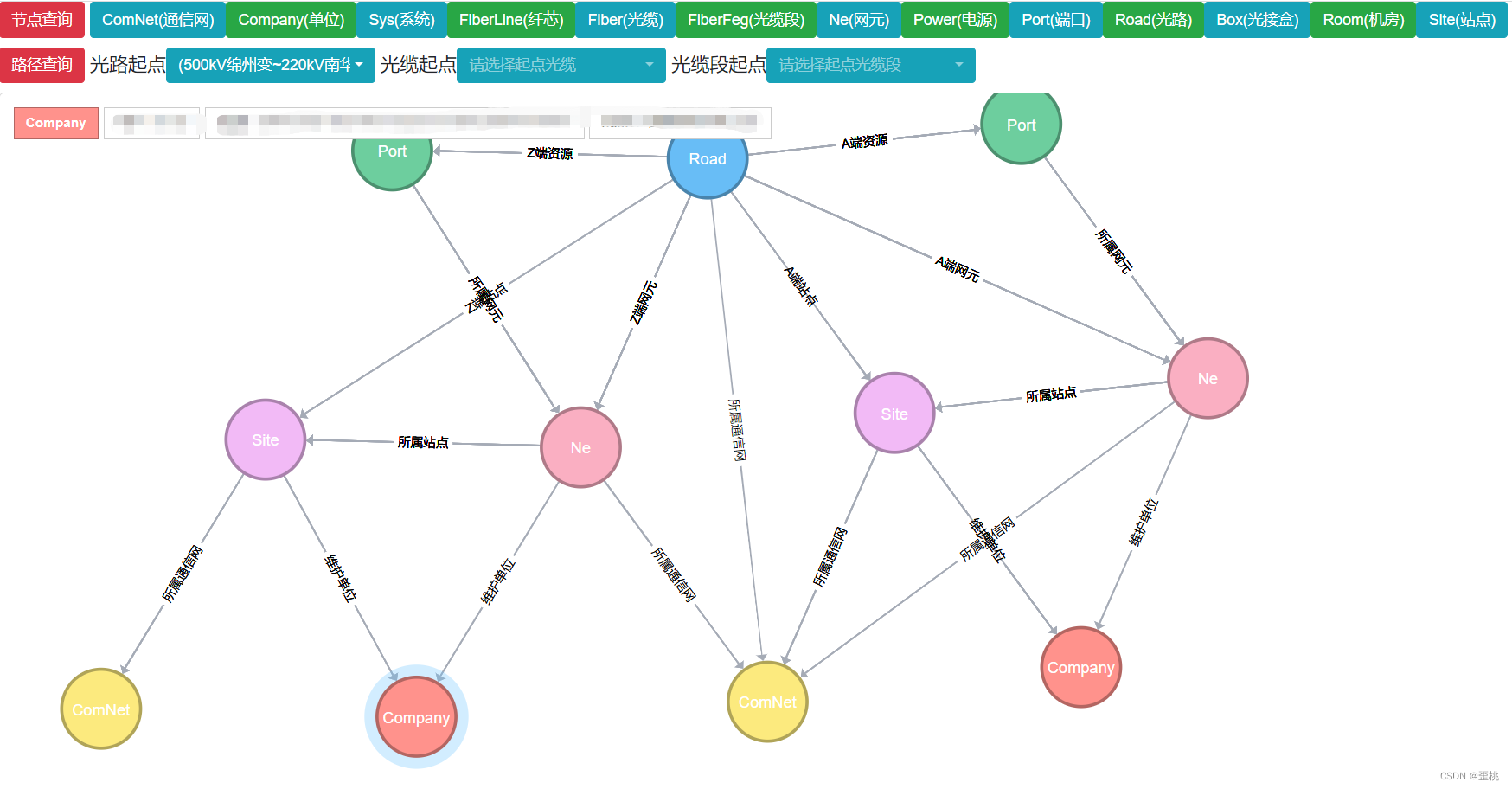
图数据库Neo4j学习五渲染图数据库neo4jd3
文章目录 1.现成的工具2.Neo4j JavaScript Driver3.neovis4.neo4jd34.1neo4jd3和neovis对比4.2获取neo4jd34.3neo4jd3的数据结构4.4Spring data neo4.4.1 定义返回数据格式4.4.1.1NeoResults4.4.1.2GraphVO4.4.1.3NodeVO4.4.1.4ShipVO 4.4.2 SDN查询解析4.4.2.1 Repo查询语句4.…...

AI增强的社交网络·导师·电话客服……
本月共更新80条知识, 智能时代,人与人之间的差距,体现在前沿知识的整合上。 # BeFake AI AI-augmented social network AI增强的社交网络,用户使用文本提示来生成图像,拍摄自己的“AI”版本。任何人都可以创建全新的虚…...

c# Task异步使用
描述 Task出现之前,微软的多线程处理方式有:Thread→ThreadPool→委托的异步调用,虽然可以满足基本业务场景,但它们在多个线程的等待处理方面、资源占用方面、延续和阻塞方面都显得比较笨拙,在面对复杂的业务场景下&am…...

QuickLook概述和使用以及常用插件
1、QuickLook概述 QuickLook: 是可以快速预览的工具,开源、免费。通过空格键即可快速查看文件内容。 文件无需打开就可以用QuickLook一键快速预览。 说明文档:https://en.wikipedia.org/wiki/Quick_Look github地址:https://git…...

1A快恢复整流二极管型号汇总
快恢复整流二极管是二极管中的一种,开关特性好、反向恢复时间短,在开关电源、PWM脉宽调制器、变频器等电子电路中经常能看到它的身影。快恢复整流二极管的内部结构与普通PN结二极管不同,它属于PIN结型二极管,即在P型硅材料与N型硅…...

【element-ui】el-dialog改变宽度
dialog默认宽度为父元素的50%,这就导致在移动端会非常的窄,如图1,需要限定宽度。 解决方法:添加custom-class属性,然后在style中编写样式,注意,如果有scoped限定,需要加::v-deep &l…...

第三讲,实践编程 Eigen
目录 1.实践 Eigen1.1 Eigen的简介1.2 Eigen 向量和矩阵的 声明1.3 Eigen的输出操作1.4 矩阵和向量相乘 要注意数据类型 矩阵纬度1.5 矩阵的四则运算1.6 矩阵求解特征向量和特征值1.7 解方程 求逆 1.实践 Eigen 1.1 Eigen的简介 Eigen是一个 C 开源线性代数库。它提供了快…...

POI实现百万数据导出
1、概述 我们都知道Excel可以分为早期的Excel2003版本(使用POI的HSSF对象操作)和Excel2007版本(使用POI的XSSF操作),两者对百万数据的支持如下: Excel 2003:在POI中使用HSSF对象时&#…...

Simics在网络转型与SDN迁移中的核心价值与应用
1. Simics在网络转型与SDN迁移中的核心价值解析网络架构正经历从传统硬件设备向软件定义网络(SDN)和网络功能虚拟化(NFV)的深刻变革。这场变革的核心挑战在于:如何在保持网络高性能的同时,实现控制平面与数据平面的解耦,以及如何将传统网络功…...

Cursor AI计算器:无缝集成开发工作流的智能计算解决方案
1. 项目概述:一个为开发者量身定制的光标计算器最近在GitHub上看到一个挺有意思的项目,叫kingdomseed/cursor-calculator。光看名字,你可能会想,这不就是个计算器吗?有什么好说的。但如果你是一个深度依赖代码编辑器&a…...

危化园区 ReID 跨镜管控难,镜像视界无感定位筑牢安全防线
危化园区 ReID 跨镜管控难,镜像视界无感定位筑牢安全防线危化工业园区作为化工生产、仓储、运输的核心载体,承载着易燃易爆、有毒有害等高危物料的全流程作业,其安全管控水平直接关系到人员生命安全、财产安全与生态环境安全。不同于普通工业…...

Adafruit Metro M4 AirLift开发板:硬件解析与物联网开发实战
1. 项目概述与硬件解析如果你正在寻找一款既能提供强大本地计算能力,又能轻松接入无线网络的微控制器开发板,那么Adafruit Metro M4 Express AirLift绝对是一个值得深入研究的选项。它不是简单的单片机加WiFi模块的堆砌,而是一个经过精心整合…...

iPhone、iPad、Mac功能联动!
今天分享几个iPhone、iPad、Mac之间的联动技巧 通讯转接 iPhone不在身边或者不方便拿出来接听电话,在身边的iPad、Mac也可以接听电话,设置方法如下: 打开设置 – 电话 – 在其他设备上通话 – 勾选上iPad、Mac设备就可以了,iPh…...

OpenGL 调试方式
调试手段总览 API 级错误检查:glGetError、断言、包装宏调试输出机制:GL_KHR_debug、glDebugMessageCallback、QOpenGLDebugLogger着色器与程序调试:编译/链接日志、离线编译器、颜色编码调试渲染结果调试:FBO 检查、glReadPixels…...

嵌入式开发中的模拟信号处理:ADC、DAC与PWM核心原理与CircuitPython实战
1. 项目概述:从数字世界到物理世界的桥梁在嵌入式开发的世界里,我们写的代码最终是要和物理世界打交道的。物理世界是连续的、模拟的——光线强弱、温度高低、声音大小,这些都不是简单的“开”或“关”,而是平滑变化的连续量。而我…...

开源AI智能体技能库:模块化设计赋能AI应用开发
1. 项目概述:一个开源的AI智能体技能库最近在GitHub上闲逛,发现了一个挺有意思的项目,叫free-ai-agent-skills。光看名字,你可能会觉得这又是一个堆砌各种AI工具调用的代码仓库。但点进去仔细研究后,我发现它的定位和设…...
SPI驱动NeoPixel:硬件时序优化与跨平台控制方案
1. 项目概述:当NeoPixel遇上SPI,一个关于时序的优雅解法玩过智能LED,比如Adafruit的NeoPixel或者国内常见的WS2812B灯带的朋友,大概都体会过那种又爱又恨的感觉。爱的是它单线控制、色彩绚烂,恨的是那娇贵到令人头疼的…...

用TensorFlow 2.0复现Mask R-CNN:从ResNet主干到ROI Align的保姆级代码解读
TensorFlow 2.0实现Mask R-CNN核心技术解析:从ResNet到ROI Align的工程实践 在计算机视觉领域,实例分割一直是最具挑战性的任务之一。它不仅需要精确地定位物体,还要在像素级别上区分不同实例。本文将深入探讨如何用TensorFlow 2.0实现Mask R…...