驱动 - 20230829
练习
基于platform实现
在根节点下,增加设备树
myplatform {compatible="hqyj,myplatform";interrupts-extended=<&gpiof 9 0>, <&gpiof 7 0>, <&gpiof 8 0>;led1-gpio=<&gpioe 10 0>;reg=<0x12345678 59>;};驱动代码
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#include <linux/poll.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/timer.h>
#include <linux/of.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/platform_device.h>
#include <linux/mod_devicetable.h>// 中断
struct device_node *dnode;
unsigned int key_irqno;
struct gpio_desc *gpiono;
// 字符设备驱动
int major;
// 自动创建设备节点
struct class *cls;
struct device *dev;struct resource *res;int number = 0;
unsigned int condition = 0;
wait_queue_head_t wq_head; // 等待队列头// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{int ret;char kbuf[128] = {0};sprintf(kbuf, "number = %d", number);if (file->f_flags & O_NONBLOCK){// 非阻塞return -EINVAL;}else{// 阻塞ret = wait_event_interruptible(wq_head, condition);if (ret < 0){printk("receive signal.... \n");return ret;}}// 拷贝数据到用户空间ret = copy_to_user(ubuf, kbuf, size);if (ret){printk("copy_to_user err \n");return -EIO;}// condition清零condition = 0;return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}// 定义操作方法结构体遍历并且初始化
struct file_operations fops = {.open = mycdev_open,.read = mycdev_read,.write = mycdev_write,.release = mycdev_close,
};irqreturn_t key_handler(int irq, void *dev)
{if (number == 0){number = 1;}else{number = 0;}gpiod_set_value(gpiono, number);condition = 1;wake_up_interruptible(&wq_head);return IRQ_HANDLED;
}// 封装probe函数和remove函数
int pdrv_probe(struct platform_device *pdev)
{printk("pdrv_probe --------------------------- \n");int ret;/*** 1. 注册设备驱动*/major = register_chrdev(0, "mychrdev", &fops);if (major < 0){printk("字符设备驱动注册失败 \n");return major;}printk("字符设备驱动注册成功\n");/*** 2. 自动创建设备节点*/// 向上提交目录信息cls = class_create(THIS_MODULE, "mycdev");if (IS_ERR(cls)){printk("向上提交目录信息失败\n");return -PTR_ERR(cls);}printk("向上提交目录信息成功\n");// 向上提交设备信息dev = device_create(cls, NULL, MKDEV(major, 0), NULL, "mycdev0");if (IS_ERR(dev)){printk("向上提交设备节点失败\n");return -PTR_ERR(cls);}// 3. 初始化等待队列头init_waitqueue_head(&wq_head);// 获取MEM类型的资源res = platform_get_resource(pdev, IORESOURCE_MEM, 0);if (res == NULL){printk("获取MEM类型资源失败\n");return -ENXIO;}/*** 中断*/// 获取软中断号key_irqno = platform_get_irq(pdev, 0);if (key_irqno < 0) {printk("获取软中断号失败 \n");return -ENXIO;}printk("获取软中断号成功 \n");// 注册中断ret = request_irq(key_irqno, key_handler, IRQF_TRIGGER_FALLING, "key1", NULL);if (ret < 0){printk("注册中断失败\n");return -1;}printk("注册中断成功\n");/*** LED灯*/// 获取gpio编号gpiono=gpiod_get_from_of_node(pdev->dev.of_node,"led1-gpio",0,GPIOD_OUT_HIGH,NULL);if(IS_ERR(gpiono)){printk("解析gpio信息失败\n");return -PTR_ERR(gpiono);}printk("解析gpio编号成功\n");return 0;
}
int pdrv_remove(struct platform_device *pdev)
{free_irq(key_irqno, NULL);gpiod_set_value(gpiono, 0);gpiod_put(gpiono);device_destroy(cls, MKDEV(major, 0));class_destroy(cls);unregister_chrdev(major, "mychrdev");printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}// 构建设备树匹配表
struct of_device_id oftable[] = {{.compatible="hqyj,myplatform",},{},
};// 分配驱动信息对象并初始化
struct platform_driver pdrv = {.probe = pdrv_probe,.remove = pdrv_remove,.driver = {.name="aaaaa",.of_match_table = oftable,},
};module_platform_driver(pdrv);MODULE_LICENSE("GPL");应用层代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#include <sys/wait.h>
#include <pthread.h>
#include <signal.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <sys/time.h>
#include <sys/epoll.h>int main(int argc, const char* argv[])
{int fd;char buf[128];if ((fd = open("/dev/mycdev0", O_RDWR)) == -1) {perror("open error");exit(EXIT_FAILURE);}while (1) {bzero(buf, sizeof(buf));read(fd, buf, sizeof(buf));printf("status = %s\n", buf);}close(fd);return 0;
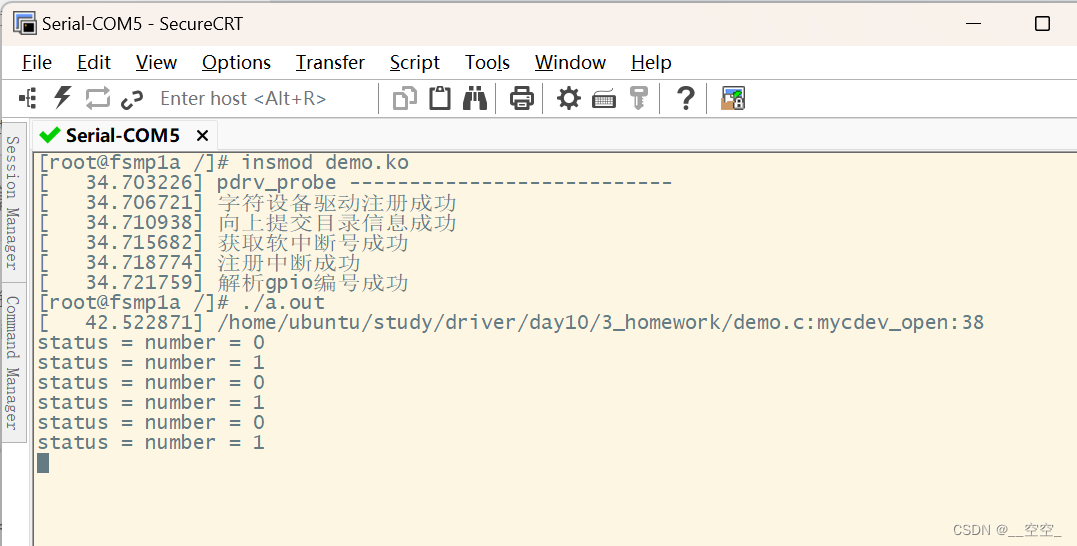
}效果展示
相关文章:
驱动 - 20230829
练习 基于platform实现 在根节点下,增加设备树 myplatform {compatible"hqyj,myplatform";interrupts-extended<&gpiof 9 0>, <&gpiof 7 0>, <&gpiof 8 0>;led1-gpio<&gpioe 10 0>;reg<0x12345678 59>;}…...
数组(个人学习笔记黑马学习)
一维数组 1、定义方式 #include <iostream> using namespace std;int main() {//三种定义方式//1.int arr[5];arr[0] 10;arr[1] 20;arr[2] 30;arr[3] 40;arr[4] 50;//访问数据元素/*cout << arr[0] << endl;cout << arr[1] << endl;cout &l…...

layui表格事件分析实例
在 layui 的表格组件中,区分表头事件和行内事件是通过事件类型(toolbar 和 tool)以及 lay-filter 值来实现的。 我们有一个表格,其中有一个工具栏按钮和操作按钮。我们将使用 layui 的 table 组件来处理这些事件。 HTML 结构&…...

Android NDK JNI与Java的相互调用
一、Jni调用Java代码 jni可以调用java中的方法和java中的成员变量,因此JNIEnv定义了一系列的方法来帮助我们调用java的方法和成员变量。 以上就是jni调用java类的大部分方法,如果是静态的成员变量和静态方法,可以使用***GetStaticMethodID、CallStaticObjectMethod等***。就…...

装备制造企业如何执行精益管理?
导 读 ( 文/ 2358 ) 精益管理是一种以提高效率、降低成本和优化流程为目标的管理方法。装备制造行业具备人工参与度高,产成品价值高,质量要求高的特点。 在装备制造企业中实施精益管理可以帮助企业提高竞争力、提升生产效率并提供高质量的产品。本文将…...
PHP8中自定义函数-PHP8知识详解
1、什么是函数? 函数,在英文中的单词是function,这个词语有功能的意思,也就是说,使用函数就是在编程的过程中,实现一定的功能。即函数就是实现一定功能的一段特定代码。 在前面的教学中,我们已…...

虚拟化技术:云计算发展的核心驱动力
文章目录 虚拟化技术的概念和作用虚拟化技术的优势虚拟化技术对未来发展的影响结论 🎉欢迎来到AIGC人工智能专栏~虚拟化技术:云计算发展的核心驱动力 ☆* o(≧▽≦)o *☆嗨~我是IT陈寒🍹✨博客主页:IT陈寒的博客🎈该系…...

光伏+旅游景区
传统化石燃料可开发量逐渐减少,并且对环境造成的危害日益突出。全世界都把目光投向了可再生能源,希望可再生能源能够改变人类的能源结构。丰富的太阳能取之不尽、用之不竭,同时对环境没有影响,光伏发电是近些年来发展最快…...
)
手搓文本向量数据库(自然语言搜索生成模型)
import paddle import jieba import pandas as pd import numpy as np import os from glob import glob from multiprocessing import Process, Manager, freeze_supportfrom tqdm import tqdm# 首先 确定的是输出的时候一定要使用pd.to_pickle() pd.read_pickle() # 计算的时…...

EVO大赛是什么
价格是你所付出的东西,而价值是你得到的东西 EVO大赛是什么? “EVO”大赛全称“Evolution Championship Series”,是北美最高规格格斗游戏比赛,大赛正式更名后已经连续举办12年,是全世界最大规模的格斗游戏赛事。常见…...

linux中使用clash代理
本机环境:ubuntu16 安装代理工具(这里使用clash) 可以手动下载解压,下载地址:https://github.com/Dreamacro/clash 也可以直接使用命令行,演示如下: userlocalhost:~$ curl https://glados.r…...
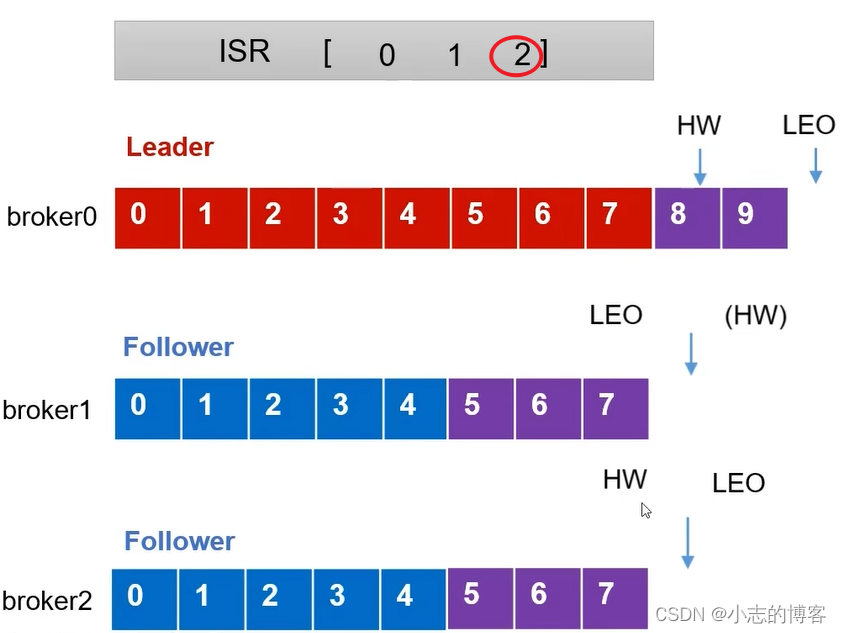
Kafka3.0.0版本——Follower故障处理细节原理
目录 一、服务器信息二、服务器基本信息及相关概念2.1、服务器基本信息2.2、LEO的概念2.3、HW的概念 三、Follower故障处理细节 一、服务器信息 三台服务器 原始服务器名称原始服务器ip节点centos7虚拟机1192.168.136.27broker0centos7虚拟机2192.168.136.28broker1centos7虚拟…...
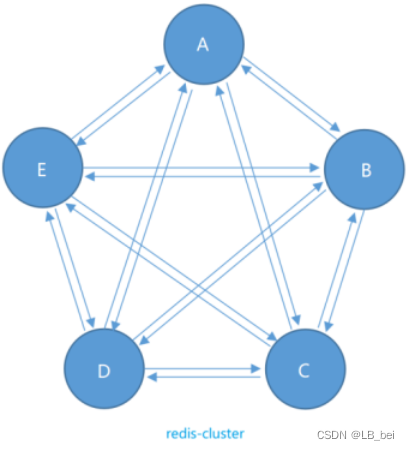
13.redis集群、主从复制、哨兵
1.redis主从复制 主从复制是指将一台redis服务器(主节点-master)的数据复制到其他的redis服务器(从节点-slave),默认每台redis服务器都是主节点,每个主节点可以有多个或没有从节点,但一个从节点…...

linux字符串处理
目录 1 C 截取字符串,截取两个子串中间的字符串2 获取该字符串后面的字符串用 strstr() 函数查找需要提取的特定字符串,然后通过指针运算获取该字符串后面的字符串用 strtok() 函数分割字符串,找到需要提取的特定字符串后,调用 strtok() 传入…...

Nginx入门——Nginx的docker版本和windows版本安装和使用 代理的概念 负载分配策略
目录 引出nginx是啥正向代理和反向代理正向代理反向代理 nginx的安装使用Docker版本的nginx安装下载创建挂载文件获取配置文件创建docker容器拷贝容器中的配置文件删除容器 创建运行容器开放端口进行代理和测试 Windows版本的使用反向代理多个端口运行日志查看启动关闭重启 负载…...
Zebec Protocol:模块化 L3 链 Nautilus Chain,深度拓展流支付体系
过去三十年间,全球金融科技领域已经成熟并迅速增长,主要归功于不同的数字支付媒介的出现。然而,由于交易延迟、高额转账费用等问题愈发突出,更高效、更安全、更易访问的支付系统成为新的刚需。 此前,咨询巨头麦肯锡的一…...
Oracle-rolling upgrade升级19c
前言: 本文主要描述Oracle11g升19c rolling upgrade升级测试,通过逻辑DGautoupgrade方式实现rolling upgrade,从而达到在较少停机时间内完成Oracle11g升级到19c的目标 升级介绍: 升级技术: rolling upgrade轮询升级,通过采用跨版…...

Spring IOC详解
Spring 笔记 官网:https://spring.io/ 核心功能:当你的项目启动的时候,自动的将当前项目的各种 Bean 都自动的注册到 Spring 容器中,然后在项目的其他地方,如果需要用到这些 Bean,直接去 Spring 容器中查…...
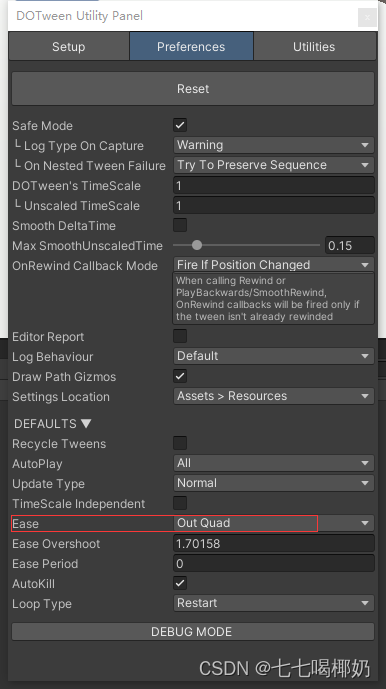
Unity——DOTween插件使用方法简介
缓动动画既是一种编程技术,也是一种动画的设计思路。从设计角度来看,可以有以下描述 事先设计很多基本的动画样式,如移动、缩放、旋转、变色和弹跳等。但这些动画都以抽象方式表示,一般封装为程序函数动画的参数可以在使用时指定&…...
数据库——Redis 单线程模型详解
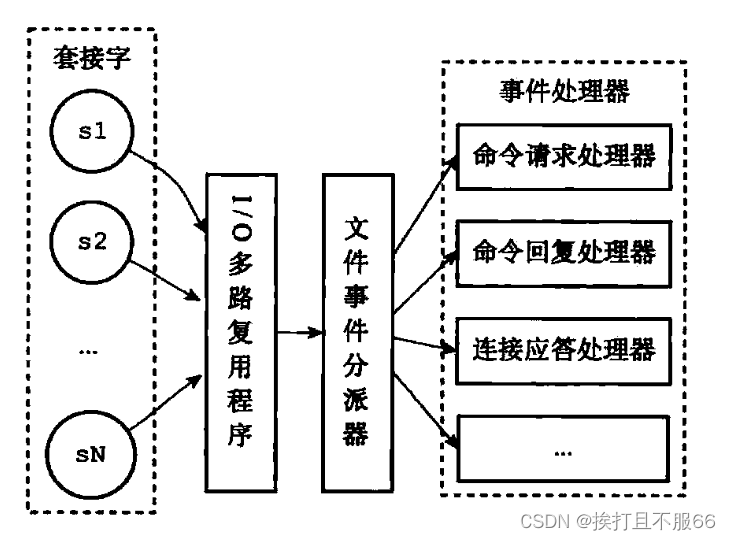
文章目录 Redis 基于 Reactor 模式来设计开发了自己的一套高效的事件处理模型 (Netty 的线程模型也基于 Reactor 模式,Reactor 模式不愧是高性能 IO 的基石),这套事件处理模型对应的是 Redis 中的文件事件处理器(file …...

当“数字孪生”有了坐标、时序和一棵“会落叶的树”:NNU‑Campus‑Geo3DGS 数据集深度解读
地理编码的3D高斯,联结了数字重建与“真实地面”之间的两条坐标轴线假设你是一名城市规划师,面对一座城市的数字孪生模型——楼宇轮廓完整、道路走向清晰、绿化植被葱郁——但无论怎样旋转视角,这座模型都“悬浮”在地理基准面之上࿰…...

AI时代,那些还在知乎认真回答问题的人
文/窦文雪编辑/李乐2023年5月1日,德里克文坐在电脑前,终于决定发出一些东西。那一天对他来说,更像是某种迟到多年的开场。此前十多年,他一直是知乎上一个安静的旁观者。很多时候,他躲在页面背后,看各个领域…...

六核国产CPU高性能显控方案:从自主可控到流畅体验的工程实践
1. 项目概述:从“能用”到“好用”的国产化显控之路 最近几年,但凡关注过信息技术领域的朋友,对“国产化”、“自主可控”这几个词一定不陌生。从芯片到操作系统,再到上层应用,一场深刻的产业变革正在发生。我作为一名…...

DeepSeek-Coder-V2:如何用开源代码智能模型解决企业级开发痛点?
DeepSeek-Coder-V2:如何用开源代码智能模型解决企业级开发痛点? 【免费下载链接】DeepSeek-Coder-V2 DeepSeek-Coder-V2: Breaking the Barrier of Closed-Source Models in Code Intelligence 项目地址: https://gitcode.com/GitHub_Trending/de/Deep…...

实测taotoken平台api调用的响应延迟与稳定性体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测taotoken平台api调用的响应延迟与稳定性体验 在将大模型能力集成到实际应用时,除了模型本身的效果,API…...

UVa 259 Software Allocation
题目分析 一个计算中心有 101010 台不同的计算机(编号 000 至 999),每台计算机在同一时间只能运行一个应用程序。有 262626 种应用程序,名称分别为 A\texttt{A}A 至 Z\texttt{Z}Z。每天会有用户提交应用程序,同一个应用…...

HTML到DOCX格式转换的技术实现与解决方案
HTML到DOCX格式转换的技术实现与解决方案 【免费下载链接】html-to-docx HTML to DOCX converter 项目地址: https://gitcode.com/gh_mirrors/ht/html-to-docx 在Web应用开发和企业文档处理流程中,HTML内容与Office文档格式之间的转换一直是一个技术难点。传…...

如何利用EdiZon实现Switch游戏存档编辑与内存修改的完整指南
如何利用EdiZon实现Switch游戏存档编辑与内存修改的完整指南 【免费下载链接】EdiZon 💡 A homebrew save management, editing tool and memory trainer for Horizon (Nintendo Switch) 项目地址: https://gitcode.com/gh_mirrors/ed/EdiZon EdiZon是一款专…...

提示词失效?图像模糊?边缘锯齿?,深度拆解Midjourney毛玻璃效果的3大渲染瓶颈与实时修复路径
更多请点击: https://kaifayun.com 第一章:Midjourney毛玻璃效果的本质与视觉语义定位 毛玻璃效果(Frosted Glass Effect)在 Midjourney 中并非原生支持的渲染模式,而是用户通过提示词工程、风格化参数与后期语义引导…...
)
告别BMC踩坑:手把手教你用U盘给IBM/Lenovo x3650 M5装系统(含JRE报错解决方案)
企业级服务器系统部署实战:IBM/Lenovo x3650 M5的U盘安装全指南 当面对一台崭新的IBM/Lenovo x3650 M5服务器时,许多IT运维人员都会遇到系统部署的挑战。虽然官方文档通常推荐通过BMC/IMM远程管理接口进行安装,但现实操作中,Java…...