约束优化:约束优化的三种序列无约束优化方法
文章目录
- 约束优化:约束优化的三种序列无约束优化方法
- 外点罚函数法
- L2-罚函数法:非精确算法
- 对于等式约束
- 对于不等式约束
- L1-罚函数法:精确算法
- 内点罚函数法:障碍函数法
- 等式约束优化问题的拉格朗日函数法:Uzawa's Method for convex optimization
- 参考文献
约束优化:约束优化的三种序列无约束优化方法
罚函数法是指将约束作为惩罚项加到目标函数中,从而转化成熟悉的无约束优化问题。
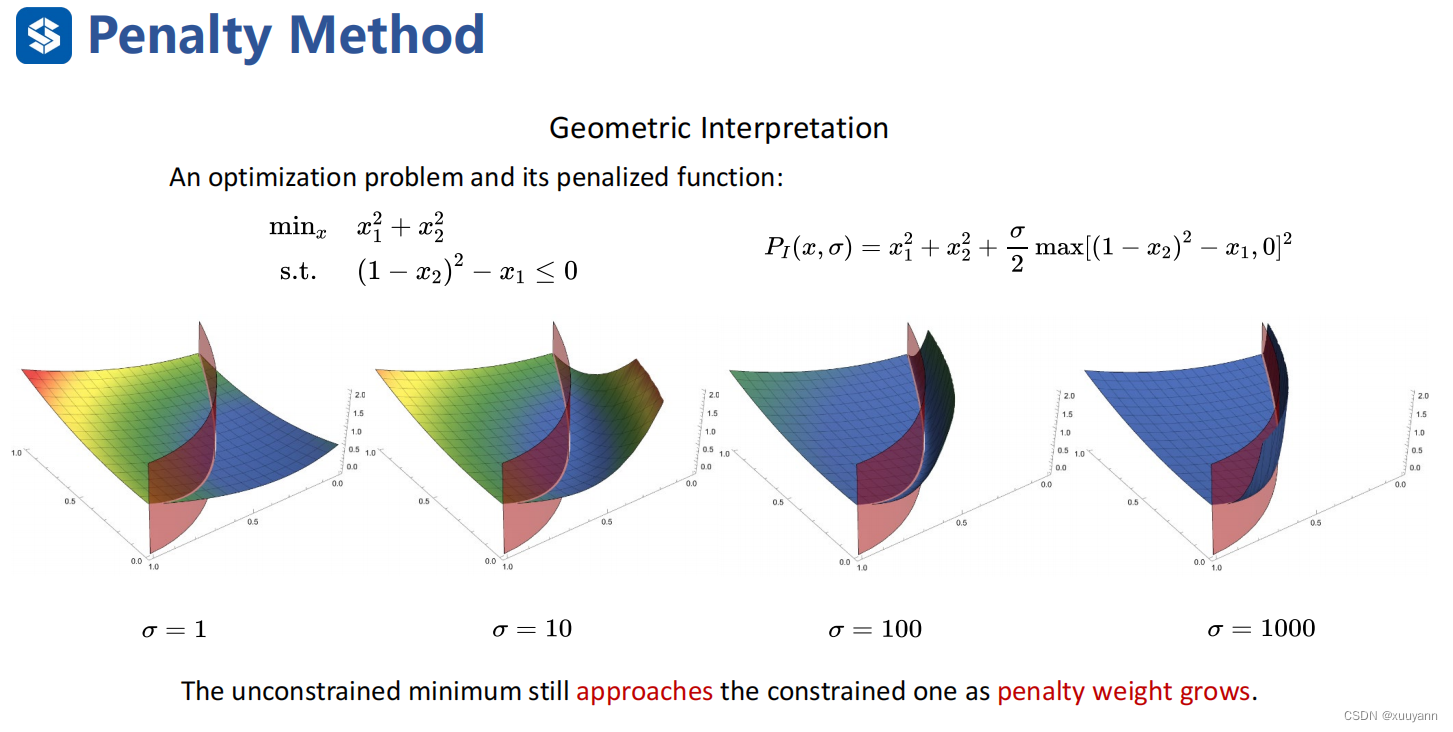
外点罚函数法
简而言之,外点罚函数法是指对于可行域外的点,惩罚项为正,即对该点进行惩罚;对于可行域内的点,惩罚项为0,即不做任何惩罚。因此,该算法在迭代过程中点列一般处于可行域之外,惩罚项会促使无约束优化问题的解落在可行域内。罚函数一般由约束部分乘正系数组成,通过增大该系数,我们可以更严厉地惩罚违反约束的行为,从而迫使惩罚函数的最小值更接近约束问题的可行区域。
L2-罚函数法:非精确算法
对于等式约束


对于不等式约束
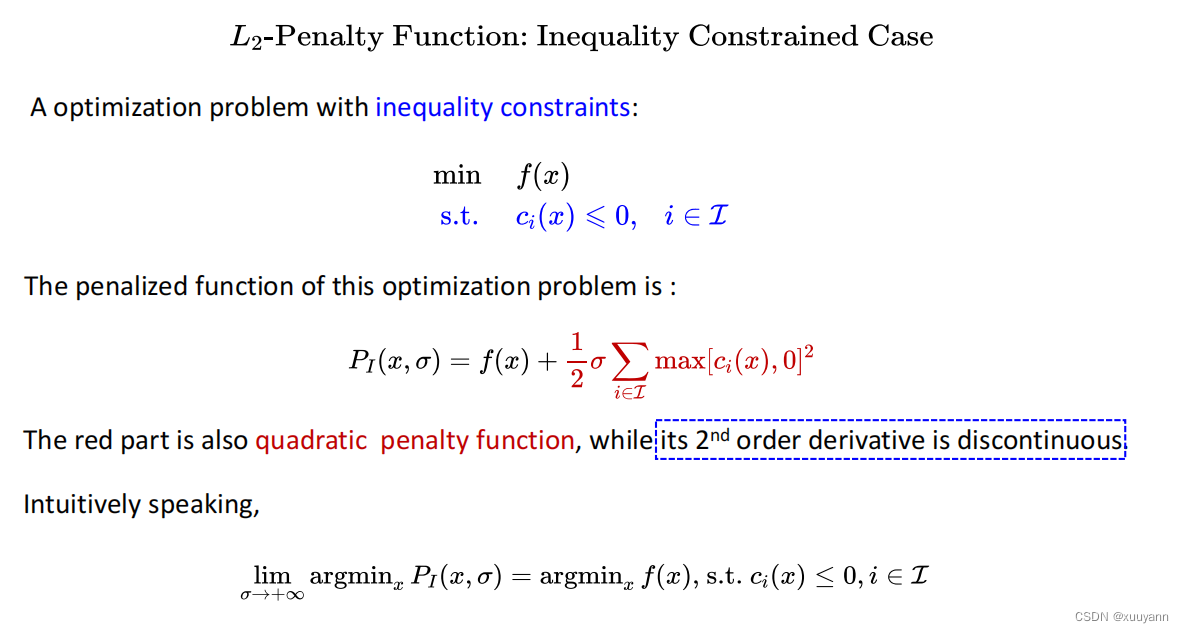
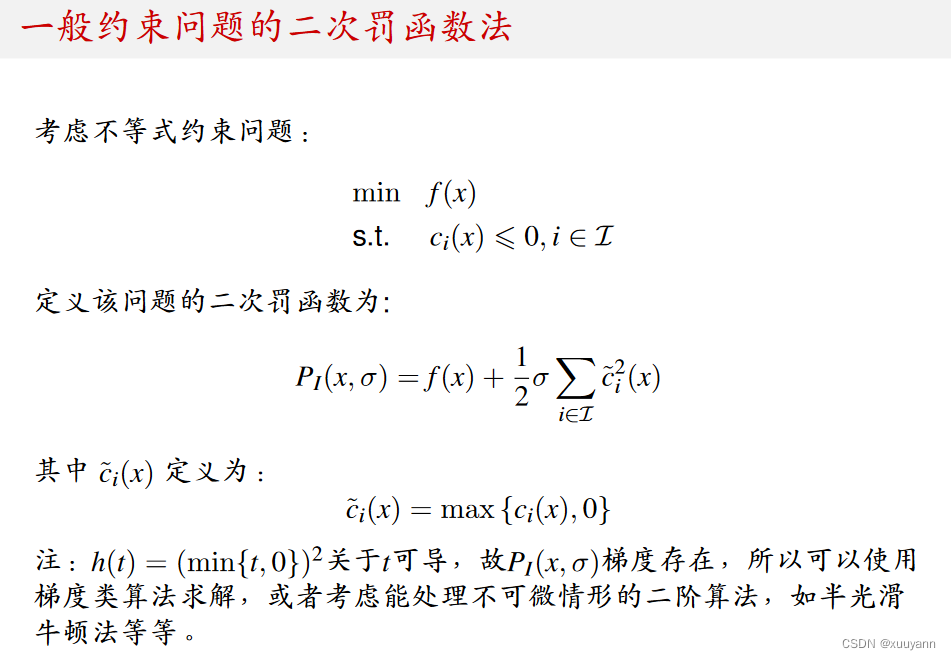
对于一般优化问题,则是将上述不等式约束和等式约束的惩罚项加到一起。

什么情况下使用L2-罚函数法?
- 实际优化问题中,等式与不等式约束具有物理意义;
- 约束违背量不要求特别小,在1e-2~1e-3之间可接受就行。例如某优化问题中速度约束v≤10v \leq 10v≤10,解v=10.01v=10.01v=10.01也可以接受。
使用该方法时,可采用如下两种方式:
- 一步到位,即取σ\sigmaσ足够大,直接解无约束罚函数P最优化问题,此时P最优解是个近似解,与实际最优解之间的误差在可接受范围内;
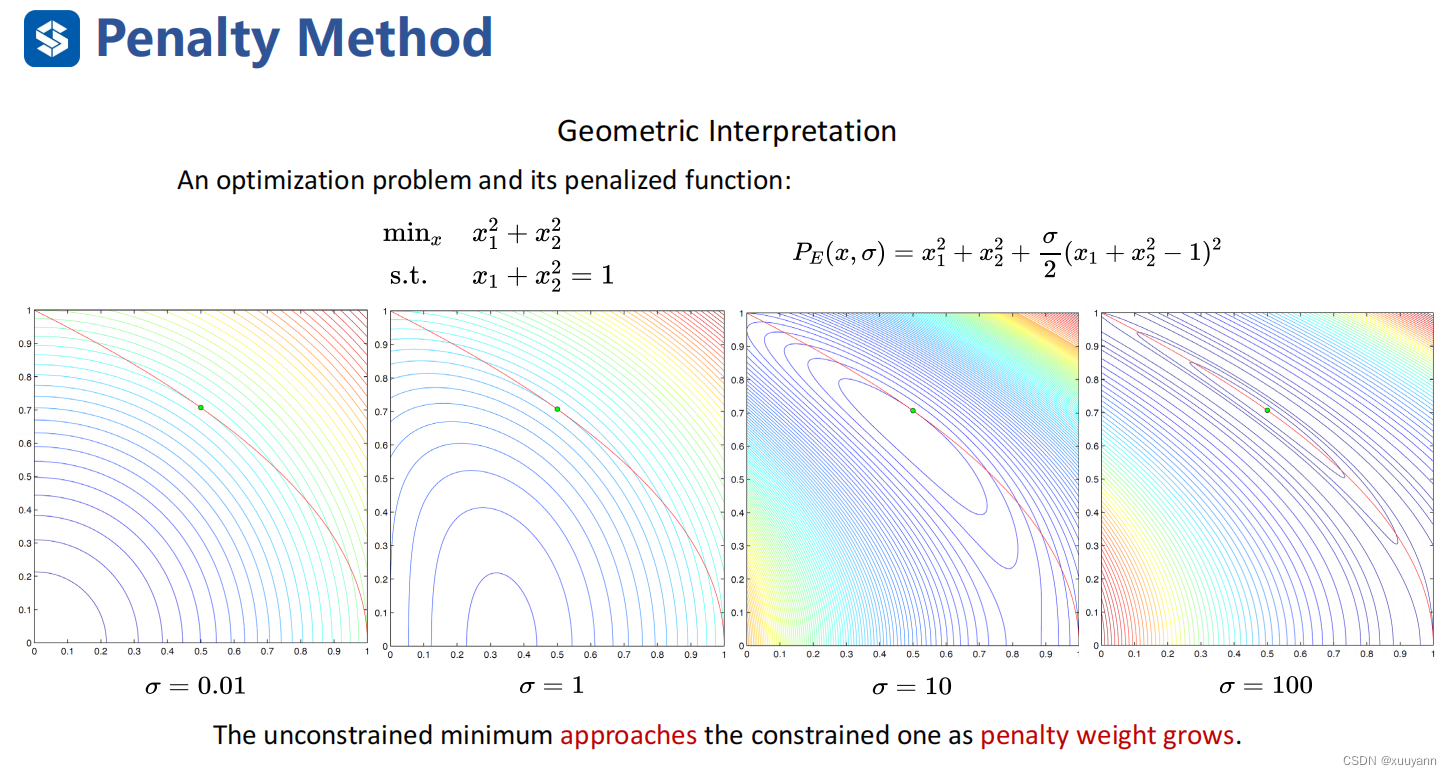
- 序列迭代优化,例如:
σ=1⟹P(x,1)\sigma=1 \implies P(x,1)σ=1⟹P(x,1),解x1∗=x1x^{*}_{1}=x_1x1∗=x1;
σ=10⟹P(x,10)\sigma=10 \implies P(x,10)σ=10⟹P(x,10),上一次迭代x1x_1x1作初值解x2∗=x2x^{*}_{2}=x_2x2∗=x2;
σ=100⟹P(x,100)\sigma=100 \implies P(x,100)σ=100⟹P(x,100),上一次迭代x2x_2x2作初值解x3∗=x3x^{*}_{3}=x_3x3∗=x3;
……直到达到收敛准则。算法伪代码如下:
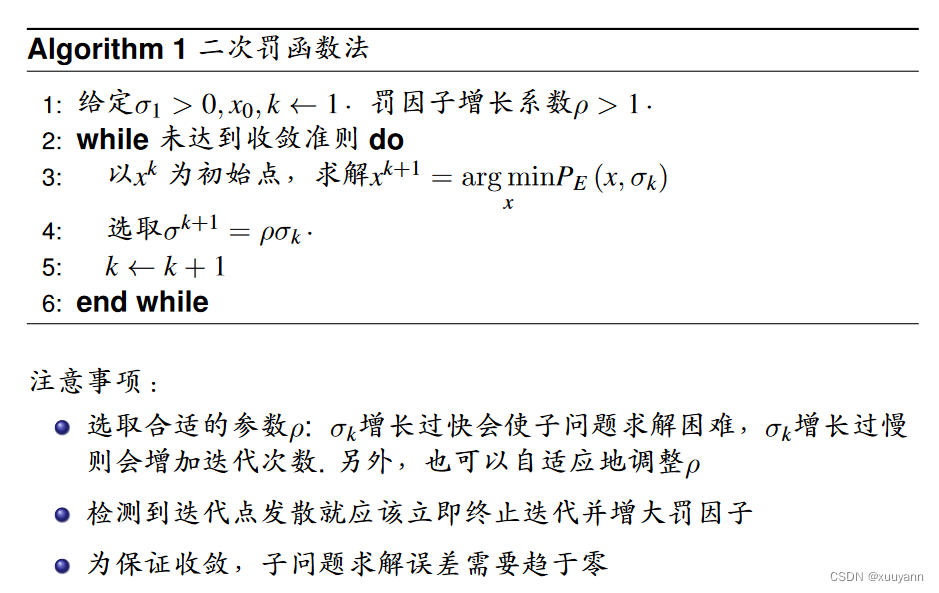
一般情况下,具体选择何种方式取决于实际工程问题的精度需求和速度需求。
L2-罚函数法的优缺点?
优点:
- 将约束优化问题转化为无约束优化问题,当ci(x)c_i(x)ci(x)光滑时可以调用一般的无约束光滑优化问题算法求解;
- 二次罚函数形式简洁直观而在实际中广泛使用。
缺点:
- 需要σ→∞\sigma \rightarrow \inftyσ→∞,此时海瑟矩阵条件数过大,对于无约束优化问题的数值方法拟牛顿法与共轭梯度法存在数值困难,且需要多次迭代求解子问题;
- 对于存在不等式约束的P(x,σ)P(x,\sigma)P(x,σ)可能不存在二次可微性质,光滑性降低;
- 不精确,与原问题最优解存在距离。
例子:
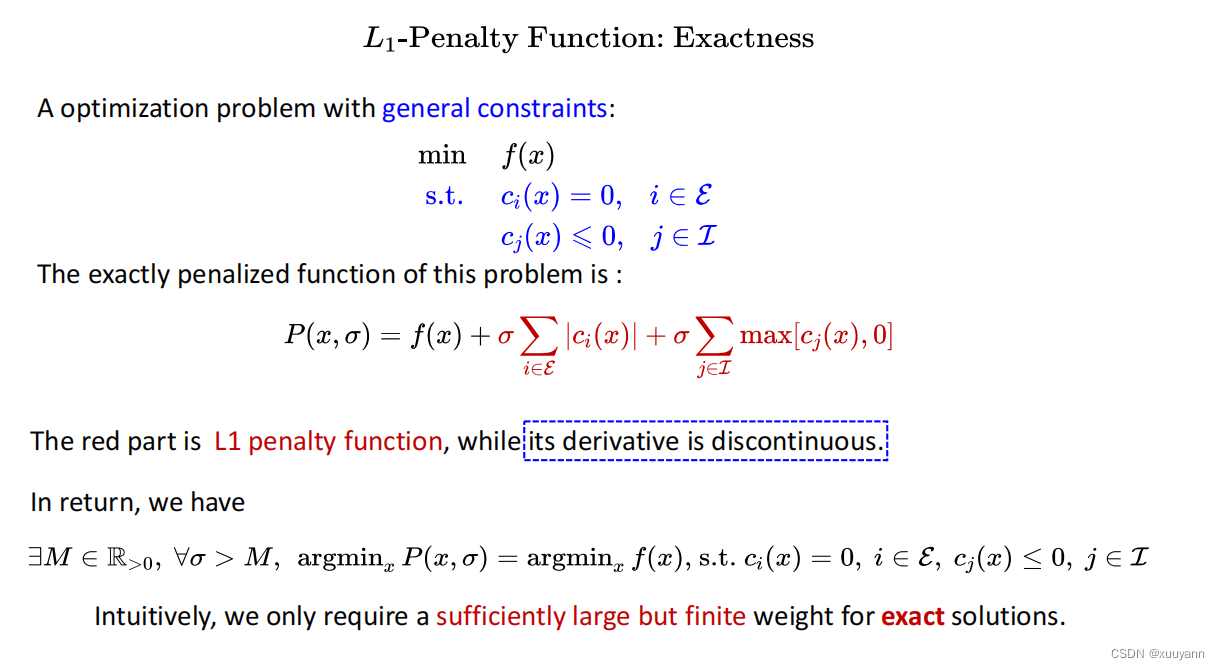
L1-罚函数法:精确算法
由于L2-罚函数法存在数值困难,并且与原问题的解存在误差,因此考虑精确罚函数法。精确罚函数是一种问题求解时不需要令罚因子趋于正无穷(或零)的罚函数。换句话说,若罚因子选取适当,对罚函数进行极小化得到的解恰好就是原问题的精确解。这个性质在设计算法时非常有用,使用精确罚函数的算法通常会有比较好的性质。
由于L1-罚函数非光滑,因此无约束优化问题P的收敛速度无法保证,这实际上就相当于用牺牲收敛速度的方式来换取优化问题P的精确最优解。
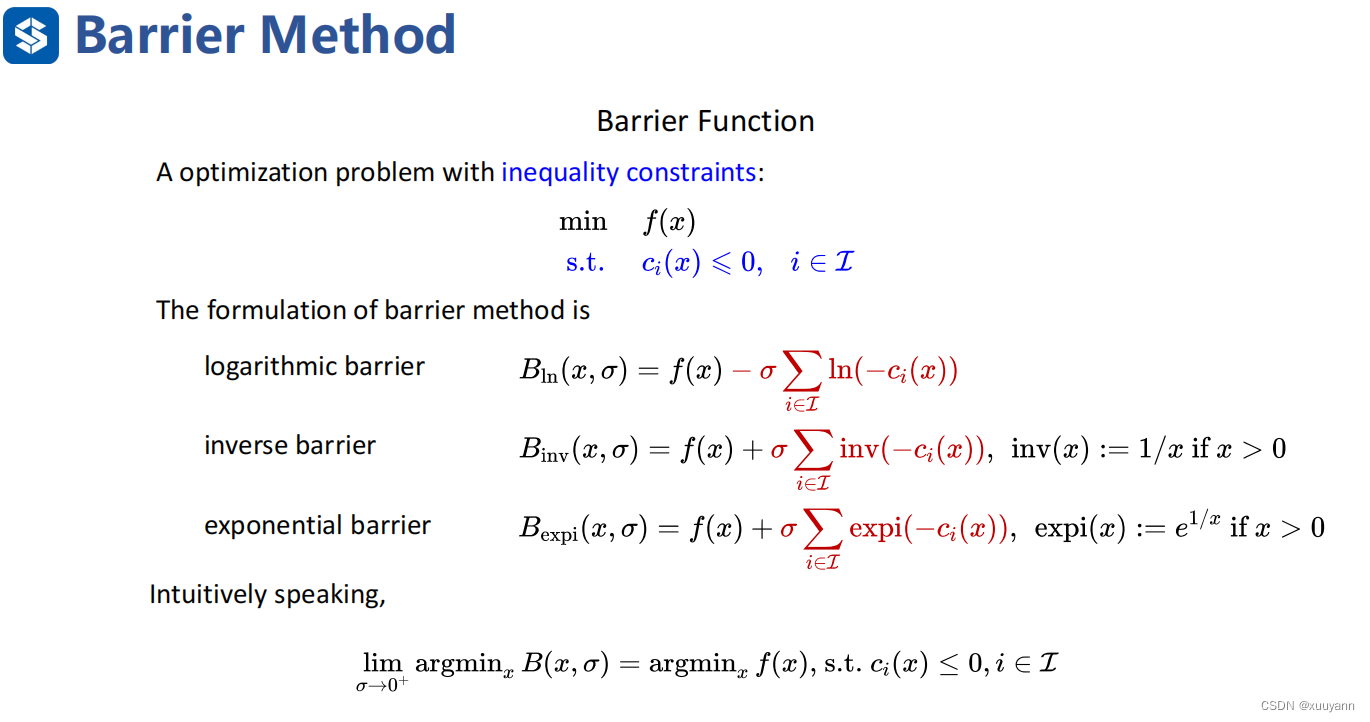
内点罚函数法:障碍函数法
前面介绍的L1和L2罚函数均属于外点罚函数,即在求解过程中允许自变量xxx位于原问题可行域之外,当罚因子趋于无穷时,子问题最优解序列从可行域外部逼近最优解。自然地,如果我们想要使得子问题最优解序列从可行域内部逼近最优解,则需要构造内点罚函数。顾名思义,内点罚函数在迭代时始终要求自变量xxx不能违反约束,因此它主要用于不等式约束优化问题。
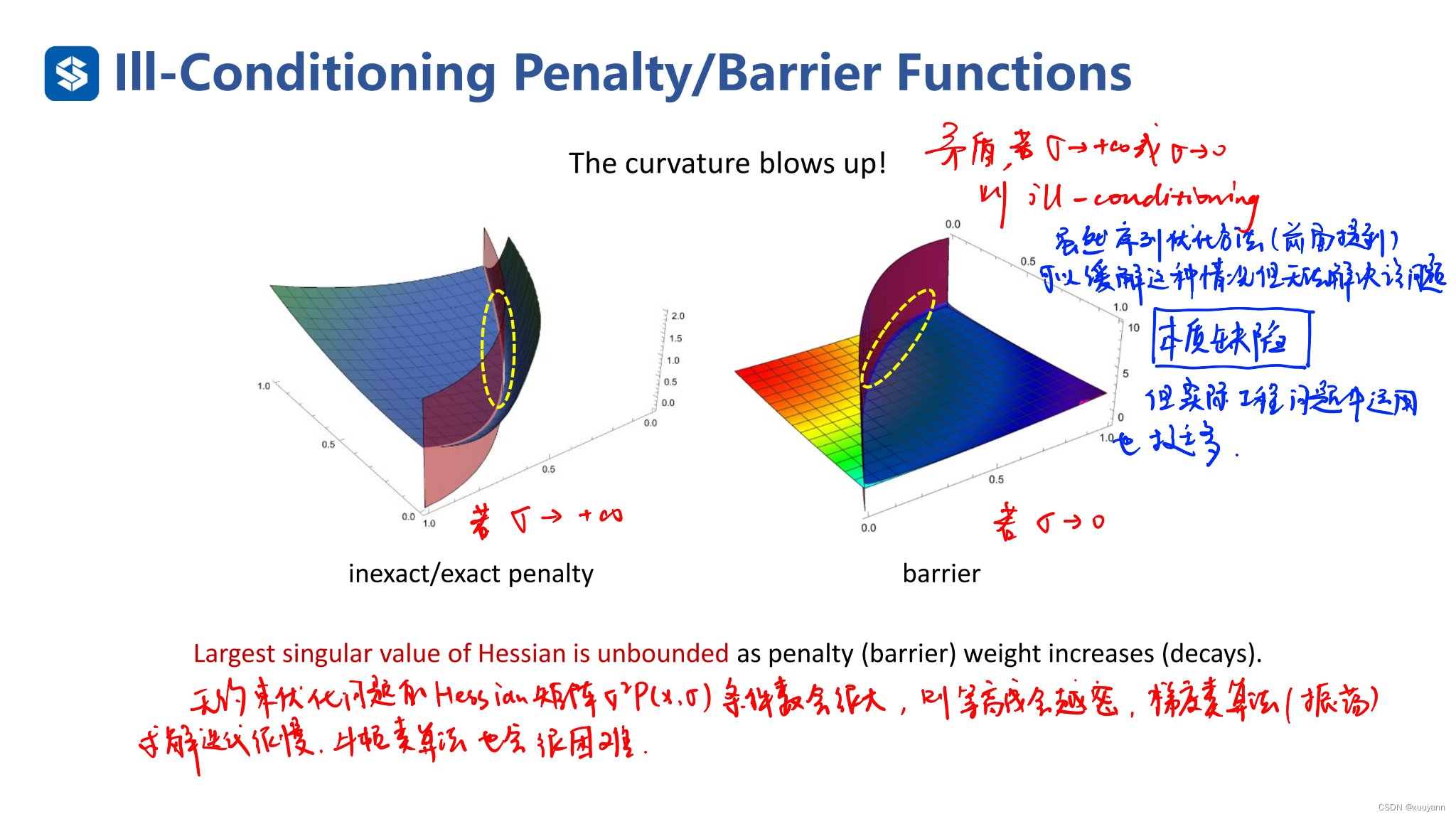
如下图所示,考虑含不等式约束的优化问题,为了使迭代点始终在可行域内,当迭代点趋于可行域边界时,我们需要罚函数趋于正无穷。常见的罚函数有三种:对数罚函数,逆罚函数和指数罚函数。对于原问题,它的最优解通常位于可行域边界,即ci(x)≤0c_i(x) \leq 0ci(x)≤0中至少有一个取到等号,此时需要调整惩罚因子σ\sigmaσ使其趋于0,这会减弱障碍罚函数在边界附近的惩罚效果。
算法伪代码如下:
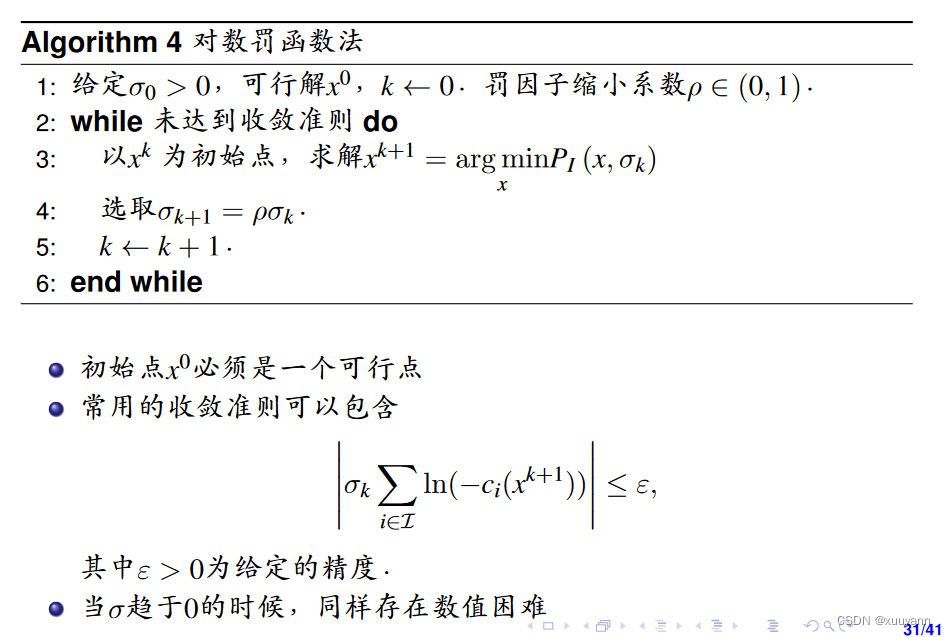
同样地,内点罚函数法也会有类似外点罚函数法的数值困难,即当σ\sigmaσ趋于0时,子问题P(x,σ)P(x,\sigma)P(x,σ)的海瑟矩阵条件数会趋于无穷,因此对子问题的求解将会越来越困难。
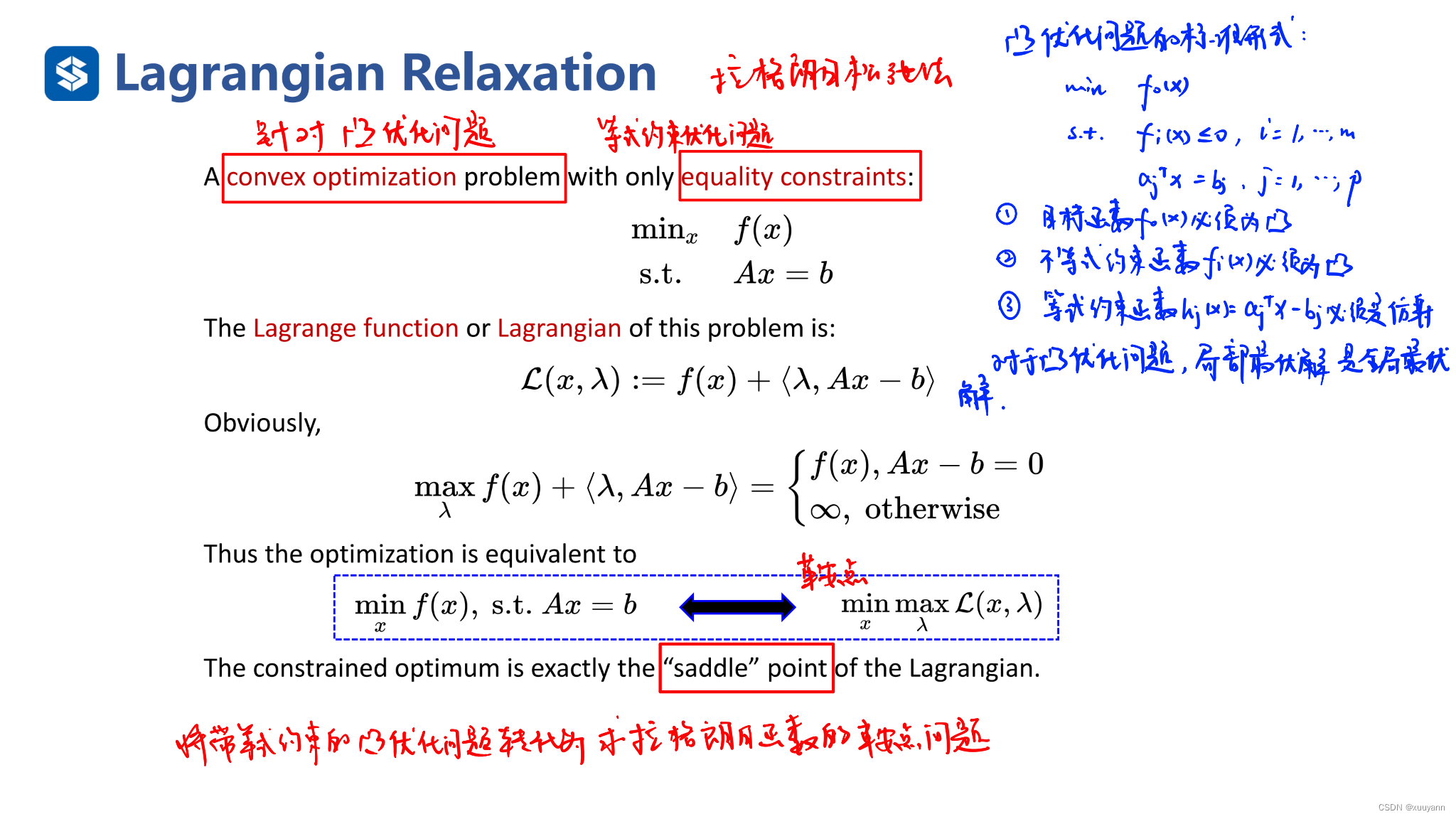
等式约束优化问题的拉格朗日函数法:Uzawa’s Method for convex optimization
基础预备:
凸优化学习笔记(一)
凸优化学习笔记:Lagrange函数、对偶函数、对偶问题、KKT条件
多元函数的极值和鞍点
**若原问题是凸问题,则KKT条件是充要条件。**原问题连续凸则拉格朗日函数严格凸,原问题的最优值p∗p^*p∗与对偶问题的最优值d∗d^*d∗相等,(x∗,λ∗)(x^*,\lambda ^*)(x∗,λ∗)是拉格朗日函数的鞍点,同时也是原问题和对偶问题的最优解。
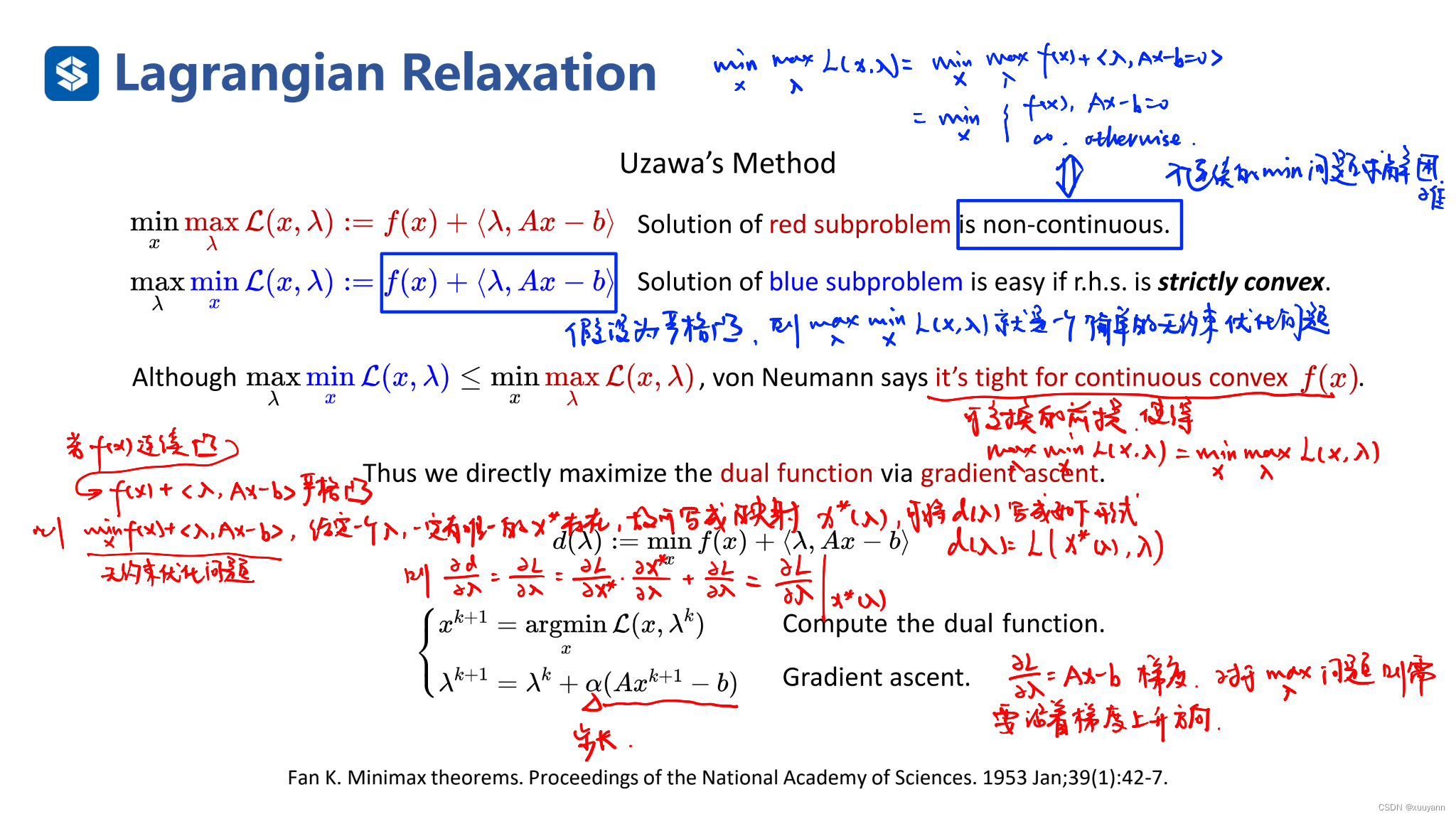
综上分析,Uzawa’s Method迭代过程分为两个步骤:
{xk+1=argminxL(x,λk)λk+1=λk+α(Axk+1−b)\left\{\begin{array}{l} x^{k+1}=\underset{x}{\operatorname{argmin}} \mathcal{L}\left(x, \lambda^k\right) \\ \lambda^{k+1}=\lambda^k+\alpha\left(A x^{k+1}-b\right) \end{array}\right. {xk+1=xargminL(x,λk)λk+1=λk+α(Axk+1−b)
(1)给定λk\lambda^kλk,求解minxL(x,λk)\min _x \mathcal{L}(x, \lambda^k)minxL(x,λk)无约束优化问题,求解得到xk+1x^{k+1}xk+1;
(2)更新λ\lambdaλ,L(xk+1,λ)L(x^{k+1},\lambda)L(xk+1,λ)关于λ\lambdaλ的梯度为∂L∂λ∣x+1=Axk+1−b\left.\frac{\partial L}{\partial \lambda}\right|_{x+1}=A x^{k+1}-b∂λ∂Lx+1=Axk+1−b,若要求解maxλL(xk+1,λ)\max _\lambda \mathcal{L}(x^{k+1}, \lambda)maxλL(xk+1,λ),则沿着梯度上升方向进入步长迭代,即λk+1=λk+α(Axk+1−b)\lambda^{k+1}=\lambda^k+\alpha\left(A x^{k+1}-b\right)λk+1=λk+α(Axk+1−b),α\alphaα为迭代步长。
该方法的前提就是原函数连续凸,L(x,λ)\mathcal L(x,\lambda)L(x,λ)关于xxx严格凸,则minxL(x,λk)\min _x \mathcal{L}(x, \lambda^k)minxL(x,λk)只存在一个最优解,可求出唯一xk+1x^{k+1}xk+1进而更新λk+1\lambda^{k+1}λk+1,否则xk+1x^{k+1}xk+1会存在多个,不知道选择哪个去更新λ\lambdaλ。因此缺点很明显,该方法要求原函数必须为连续凸函数,梯度上升步长需要调整且收敛速率不能保证。
参考文献
机器人中的数值优化
最优化:建模、算法与理论/最优化计算方法
相关文章:
约束优化:约束优化的三种序列无约束优化方法
文章目录约束优化:约束优化的三种序列无约束优化方法外点罚函数法L2-罚函数法:非精确算法对于等式约束对于不等式约束L1-罚函数法:精确算法内点罚函数法:障碍函数法等式约束优化问题的拉格朗日函数法:Uzawas Method fo…...
RocketMQ快速入门:消息发送、延迟消息、消费重试
一起学编程,让生活更随和! 如果你觉得是个同道中人,欢迎关注博主gzh:【随和的皮蛋桑】。 专注于Java基础、进阶、面试以及计算机基础知识分享🐳。偶尔认知思考、日常水文🐌。 目录1、RocketMQ消息结构1.1…...
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例
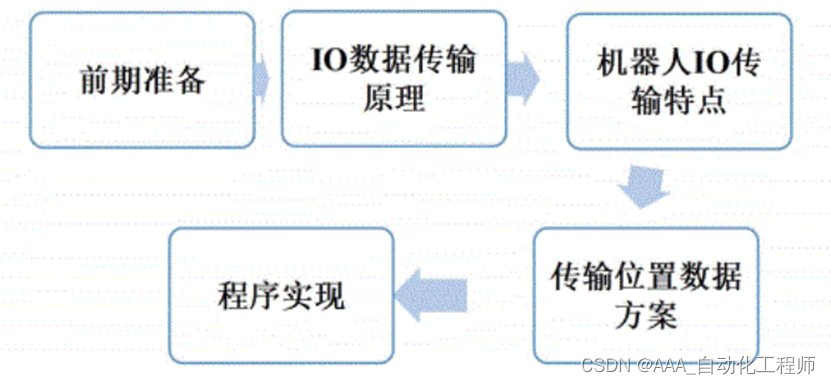
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例 在通信IO点位数量足够的情况下,可以使用机器人的IO点传输位置数据,这里以传输机器人的实时位置为例进行说明。 基本流程如下图所示: 基本步骤可参考如下: 首先确认机器人控制柜已经安装了总线通信软件(例如…...

[蓝桥杯 2015 省 B] 移动距离
蓝桥杯 2015 年省赛 B 组 H 题题目描述X 星球居民小区的楼房全是一样的,并且按矩阵样式排列。其楼房的编号为 1,2,3,⋯ 。当排满一行时,从下一行相邻的楼往反方向排号。比如:当小区排号宽度为 6 时,开始情形如下:我们的…...
Pandas库入门仅需10分钟
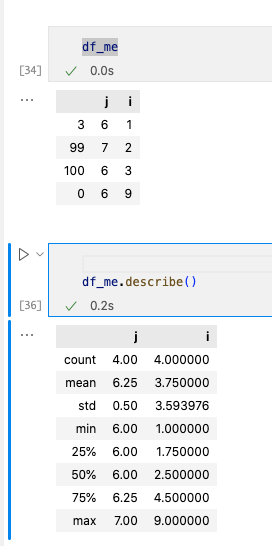
数据处理的时候经常性需要整理出表格,在这里介绍pandas常见使用,目录如下: 数据结构导入导出文件对数据进行操作 – 增加数据(创建数据) – 删除数据 – 改动数据 – 查找数据 – 常用操作(转置࿰…...

python的socket通信中,如何设置可以让两台主机通过外网访问?
要让两台主机通过外网进行Socket通信,需要在网络设置和代码实现两个方面进行相应的配置。下面是具体的步骤: 确认网络环境:首先要确保两台主机都能够通过外网访问。可以通过ping命令或者telnet命令来测试两台主机之间是否可以互相访问。 确定…...
)
检测数据的方法(回顾)
检测数据类型的4种方法typeofinstanceofconstructor{}.toString.call() 检测数据类型的4种方法 typeof 定义 用来检测数据类型的运算符 返回一个字符串,表示操作值的数据类型(7种) number,string,boolean,object,u…...
比特数据结构与算法(第三章_上)栈的概念和实现(力扣:20. 有效的括号)
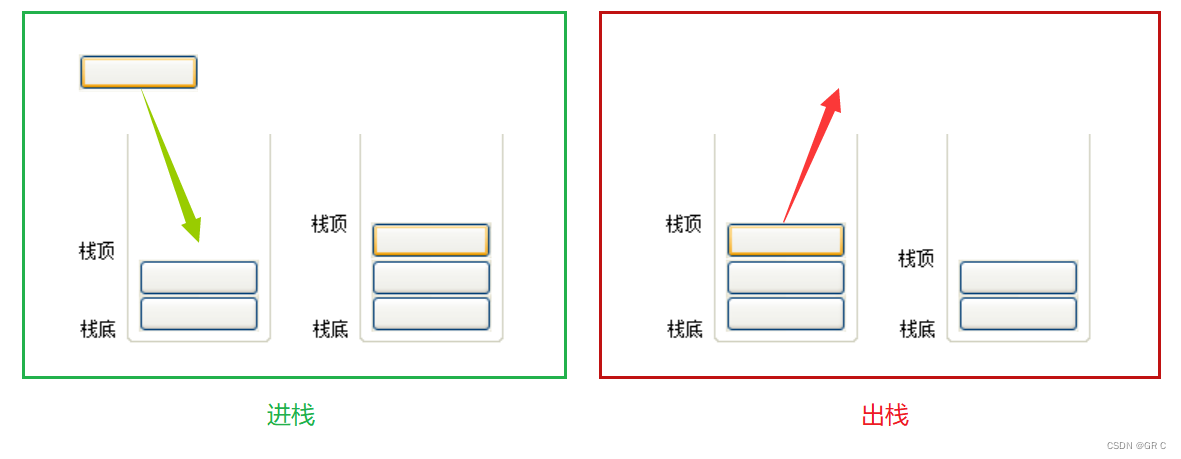
一、栈(stack)栈的概念:① 栈是一种特殊的线性表,它只允许在固定的一端进行插入和删除元素的操作。② 进行数据插入的删除和操作的一端,称为栈顶 。另一端则称为 栈底 。③ 栈中的元素遵守后进先出的原则,即…...
JVM13 类的生命周期
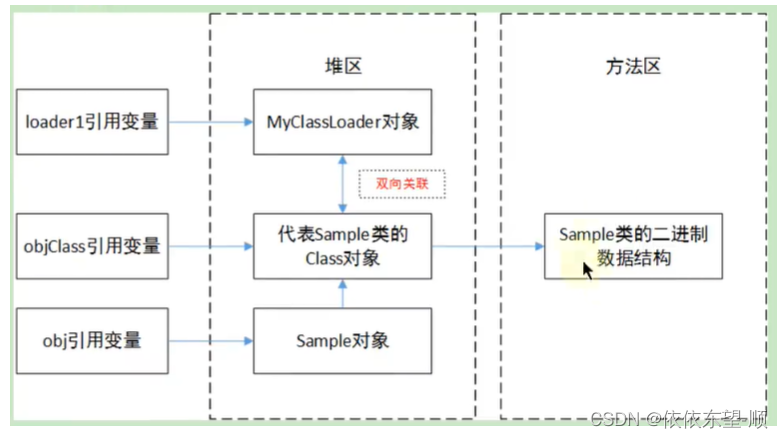
1. 概述 在 Java 中数据类型分为基本数据类型和引用数据类型。基本数据类型由虚拟机预先定义,引用数据类型则需要进行类的加载。 按照 Java 虚拟机规范,从 class 文件到加载到内存中的类,到类卸载出内存为止,它的整个生命周期包…...
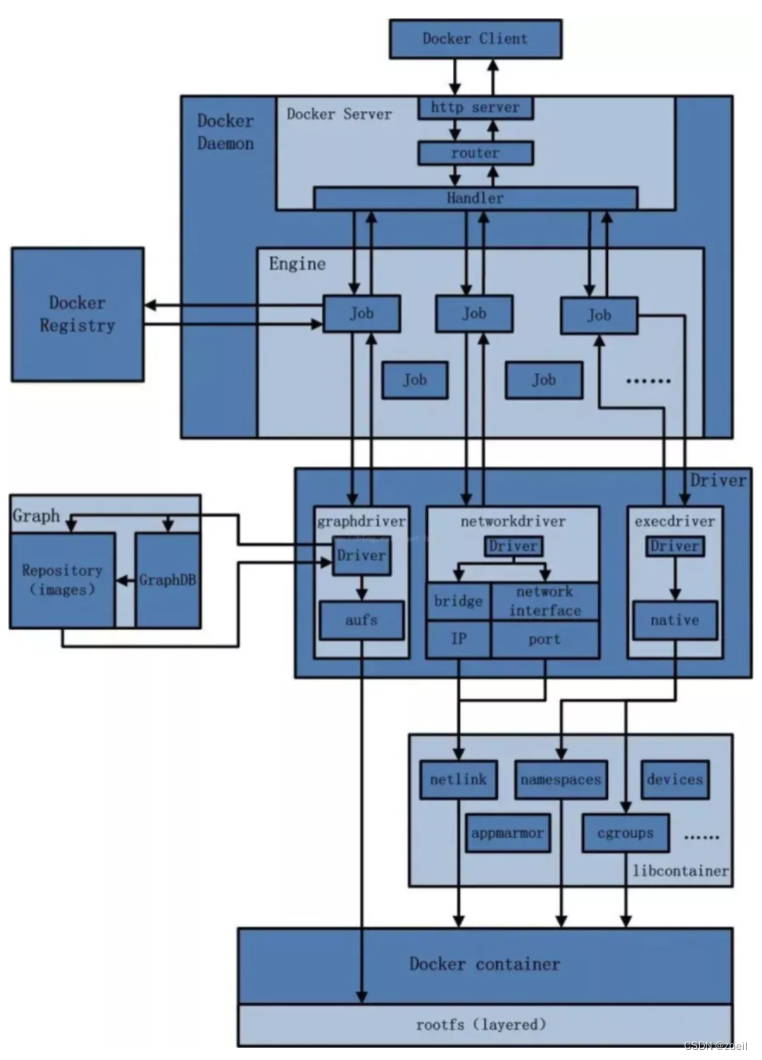
Docker网络模式解析
目录 前言 一、常用基本命令 (一)查看网络 (二)创建网络 (三)查看网络源数据 (四)删除网络 二、网络模式 (一)总体介绍 (二)…...

游山城重庆
山城楼梯多,路都是上坡。 为了赶早上8点从成都到重庆的动车,凌晨5点半就爬起床来,由于昨天喝了咖啡,所以我将尽3点才睡觉,这意味着我只睡了2个多小时。起来简单休息之后,和朋友协商好时间就一起出门了。 …...

Vuex的创建和简单使用
Vuex 1.简介 1.1简介 1.框框里面才是Vuex state:状态数据action:处理异步mutations:处理同步,视图可以同步进行渲染1.2项目创建 1.vue create 名称 2.运行后 3.下载vuex。采用的是基于vue2的版本。 npm install vuex3 --save 4.vu…...

Arduino IDE搭建Heltec开发板开发环境
Arduino IDE搭建Heltec开发板开发环境Heltec开发板开发环境下载与搭建Arduino IDE下载与安装搭建Heltec开发板的开发环境添加package URL方法通过Git的方法安装离线安装Heltec开发板开发环境下载与搭建 Arduino IDE下载与安装 Heltec的ESP系列和大部分的LoRa系列开发板都是用A…...

Using the GNU Compiler Collection 目录翻译
文章目录Introduction1 Programming Languages Supported by GCC2 Language Standards Supported by GCC2.1 C Language3 GCC Command Options3.1 Option Summary4 C Implementation-Defined Behavior6 Extensions to the C Language Family9 Binary Compatibility其他工具10 g…...

使用 OpenCV for Android 进行图像特征检测
android 开发人员,可能熟悉使用activities, fragments, intents以及最重要的一系列开源依赖库。但是,注入需要本机功能的依赖关系(如计算机视觉框架)并不像在 gradle 文件中直接添加实现语句那样简单!今天,将专注于使用 OpenCV 库…...
chatGPT笔记
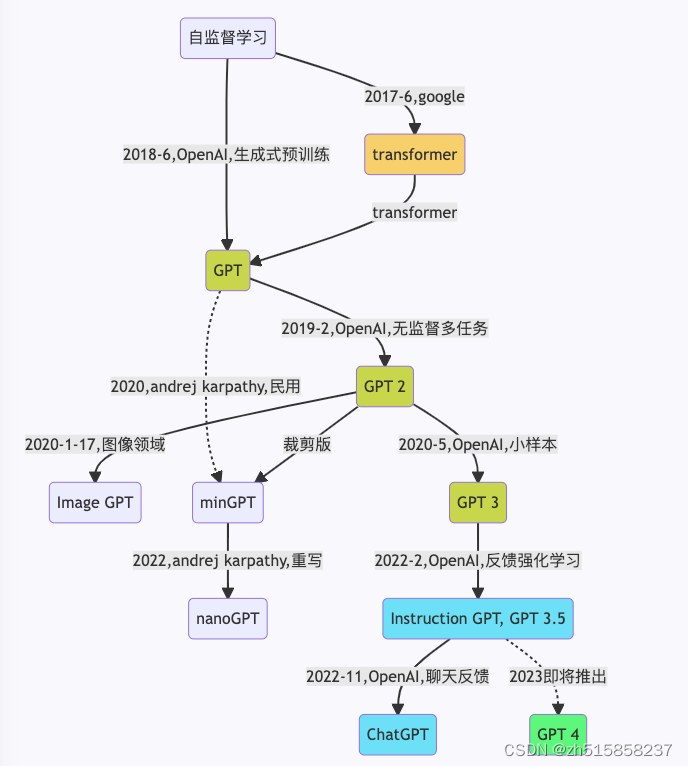
文章目录 一、GPT之技术演进时间线二、chatGPT中的语言模型instructGPT跟传统语言LM模型最大不同点是什么?三、instructGPT跟GPT-3的网络结构是否一样四、GPT和BERT有啥区别五、chatGPT的训练过程是怎样的?六、GPT3在算数方面的能力七、GPT相比于bert的优点是什么八、元学习(…...

这么好的政策和创新基地,年轻人有梦想你就来
周末有空去参观了下一个朋友办的公司。位置和环境真不错,且租金低的离谱,半年租金才2000元,且提供4个工位。这个创新基地真不赖啊,国家鼓励创新创业,助力年轻人实现梦想。场地有办公区,休息区应有尽有&…...
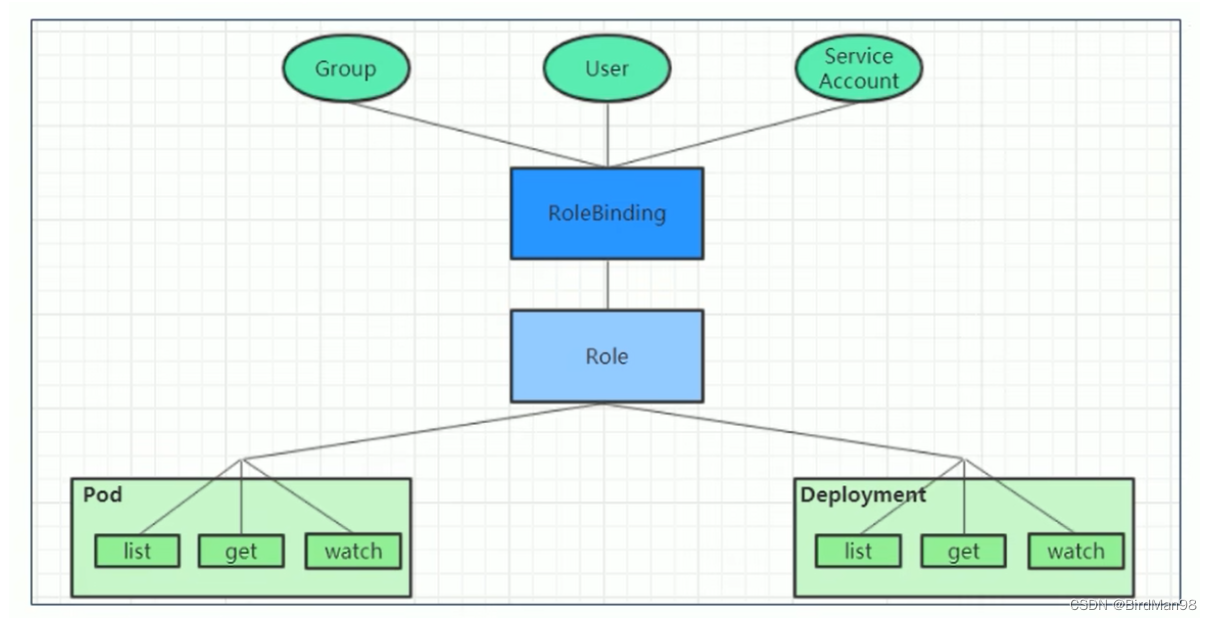
【Kubernetes】【十九】安全认证
第九章 安全认证 本章节主要介绍Kubernetes的安全认证机制。 访问控制概述 Kubernetes作为一个分布式集群的管理工具,保证集群的安全性是其一个重要的任务。所谓的安全性其实就是保证对Kubernetes的各种客户端进行认证和鉴权操作。 客户端 在Kubernetes集群…...

Apache Flink 实时计算在美的多业务场景下的应用与实践
摘要:本文整理自美的集团实时数据负责人、资深数据架构师董奇,在 Flink Forward Asia 2022 主会场的分享。本篇内容主要分为四个部分: 实时生态系统在美的的发展和建设现状 核心传统业务场景 Flink 实时数字化转型实践 新兴业务场景 Flink …...
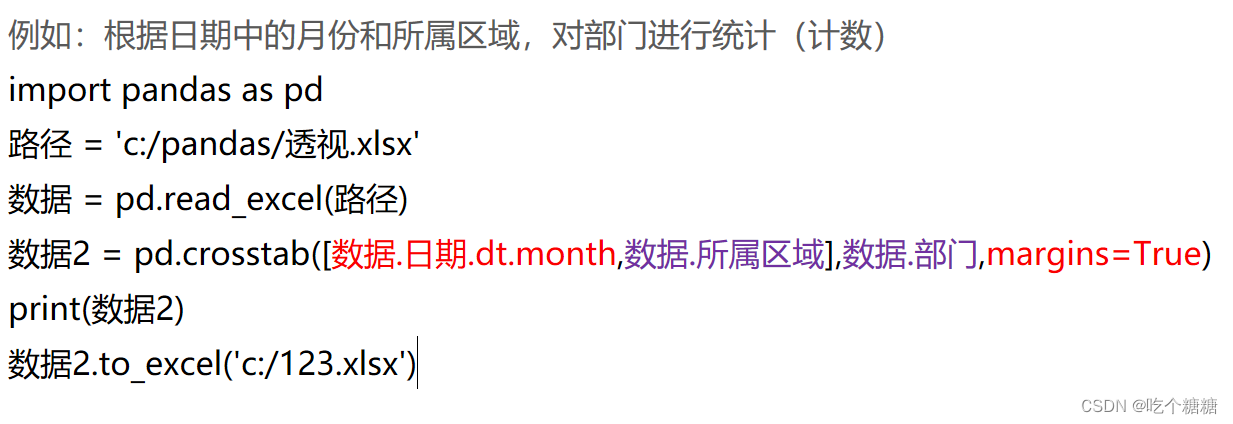
27 pandas 数据透视
文章目录pivot_table 函数1、index需要聚合的列名,默认情况下聚合所有数据值的列2、values在结果透视的行上进行分组的列名或其它分组键【就是透视表里显示的列】3、columns在结果透视表的列上进行分组的列名或其它分组键4、Aggfunc聚合函数或函数列表(默…...

效率提升秘籍:借助快马AI自动生成健壮的视频续播管理模块
最近在开发视频播放功能时,遇到了一个很常见的需求:实现"继续播放上次观看位置"的功能。本以为是个简单的功能,但实际开发中发现要考虑的细节还真不少。经过一番折腾,我总结出了一套高效的解决方案,分享给大…...

PyTorch 2.8镜像实战解析:RTX 4090D上Stable Video Diffusion推理提速实测
PyTorch 2.8镜像实战解析:RTX 4090D上Stable Video Diffusion推理提速实测 1. 镜像环境深度解析 1.1 硬件适配优化方案 这个PyTorch 2.8镜像针对RTX 4090D显卡进行了全方位优化,就像给赛车手量身定制了高性能装备。24GB显存的设计让大模型推理不再捉襟…...

Arduino红外遥控库:让硬件设备听懂遥控器的语言
Arduino红外遥控库:让硬件设备听懂遥控器的语言 【免费下载链接】Arduino-IRremote Infrared remote library for Arduino: send and receive infrared signals with multiple protocols 项目地址: https://gitcode.com/gh_mirrors/ar/Arduino-IRremote 你是…...

实战演练:在快马平台标准化java环境中构建并部署一个留言板应用
实战演练:在快马平台标准化Java环境中构建并部署一个留言板应用 最近在做一个Java Web项目的原型开发时,发现环境配置总是最耗时的环节。特别是团队协作时,每个人的JDK版本、依赖管理工具都可能不同,导致"在我机器上能跑&qu…...

WooCommerce 的 SEO 优化技巧有哪些_WooCommerce 的结账流程如何设置
WooCommerce 的 SEO 优化技巧有哪些 在当今电子商务领域,WooCommerce 作为一个功能强大的 WordPress 插件,被广泛用于搭建电子商店。一个功能强大的平台也需要优化,特别是 SEO 优化。SEO(Search Engine Optimization,…...

GitHub开源项目日报 · 2026年4月1日 · AI编程助手与语音模型引领榜单
本期榜单主要涵盖开发者工具、AI应用和实用库三大类项目。从终端编程助手到语音AI模型,从HTTP客户端到提示词资源库,展示了当前开源生态的多样化发展。超过10000星以上的项目有prompts.chat、Axios、Claude Code、Codex CLI、VibeVoice、Claude Code最佳实践指南、Claude Cod…...

如何用OpenRPA实现企业级流程自动化?开源RPA工具完整指南
如何用OpenRPA实现企业级流程自动化?开源RPA工具完整指南 【免费下载链接】openrpa Free Open Source Enterprise Grade RPA 项目地址: https://gitcode.com/gh_mirrors/op/openrpa 在数字化转型浪潮中,企业面临着效率瓶颈与成本压力的双重挑战。…...

Atlas800T A2上部署Qwen2.5-Omni-7B音频模型:从驱动安装到vllm-ascend服务启动的保姆级避坑记录
Atlas800T A2服务器部署Qwen2.5-Omni-7B音频模型全流程实战指南 在昇腾Atlas800T A2服务器上部署多模态大模型Qwen2.5-Omni-7B,对于需要处理音频转文字任务的开发者而言,既是技术挑战也是效率提升的关键一步。本文将带你从零开始,逐步完成从硬…...

如何解决Cats类型推导难题:SI-2712修复与部分统一完整指南
如何解决Cats类型推导难题:SI-2712修复与部分统一完整指南 【免费下载链接】cats Lightweight, modular, and extensible library for functional programming. 项目地址: https://gitcode.com/gh_mirrors/ca/cats Cats是一个轻量级、模块化且可扩展的函数式…...

Bili2text:重构B站视频内容提取流程的智能解决方案
Bili2text:重构B站视频内容提取流程的智能解决方案 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 在信息爆炸的视频时代,教育工作者、…...