Llama模型结构解析(源码阅读)
目录
- 1. LlamaModel整体结构流程图
- 2. LlamaRMSNorm
- 3. LlamaMLP
- 4. LlamaRotaryEmbedding
- 参考资料:
https://zhuanlan.zhihu.com/p/636784644
https://spaces.ac.cn/archives/8265 ——《Transformer升级之路:2、博采众长的旋转式位置编码》
前言:本次阅读代码位置,在transformers库底下的modeling_llama.py,具体位置在:transformers/models/llama/modeling_llama.py,如下图所示:
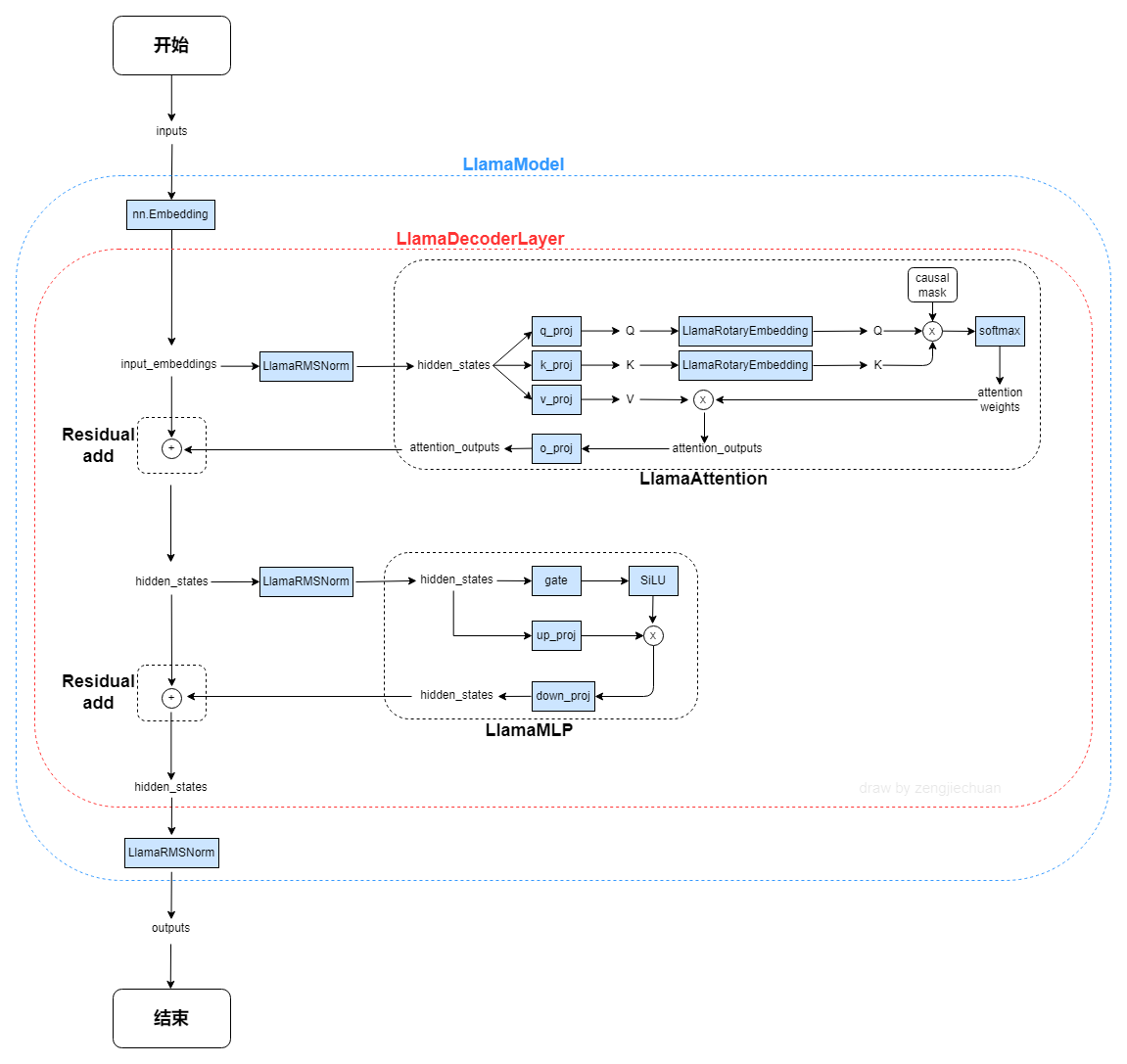
1. LlamaModel整体结构流程图
2. LlamaRMSNorm
- 代码如下
class LlamaRMSNorm(nn.Module):def __init__(self, hidden_size, eps=1e-6):"""LlamaRMSNorm is equivalent to T5LayerNorm"""super().__init__()self.weight = nn.Parameter(torch.ones(hidden_size))self.variance_epsilon = epsdef forward(self, hidden_states):input_dtype = hidden_states.dtypevariance = hidden_states.to(torch.float32).pow(2).mean(-1, keepdim=True)hidden_states = hidden_states * torch.rsqrt(variance + self.variance_epsilon)return (self.weight * hidden_states).to(input_dtype)
-
RMSNorm的公式如下所示:
x i 1 n ∑ i = 1 n x i 2 + e p s ∗ w e i g h t i \frac{x_i}{\sqrt{\frac{1}{n}\sum\limits_{i=1}^{n}{x_i}^2 + eps}} * weight_i n1i=1∑nxi2+epsxi∗weighti- 其中,公式与代码的对应关系如下:
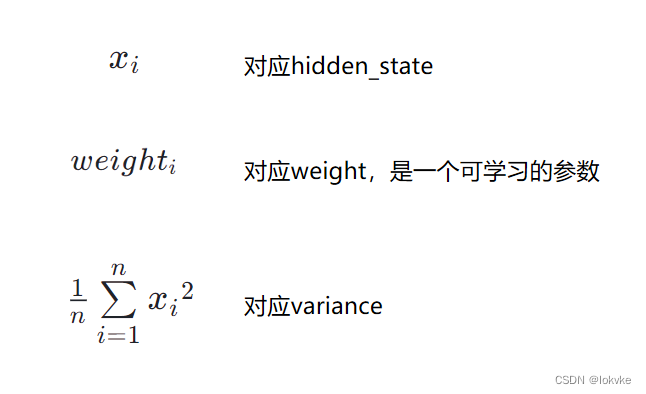
- 其中,公式与代码的对应关系如下:
3. LlamaMLP
- 代码如下:
class LlamaMLP(nn.Module):def __init__(self,hidden_size: int,intermediate_size: int,hidden_act: str,):super().__init__()self.gate_proj = nn.Linear(hidden_size, intermediate_size, bias=False)self.down_proj = nn.Linear(intermediate_size, hidden_size, bias=False)self.up_proj = nn.Linear(hidden_size, intermediate_size, bias=False)self.act_fn = ACT2FN[hidden_act]def forward(self, x):return self.down_proj(self.act_fn(self.gate_proj(x)) * self.up_proj(x))
-
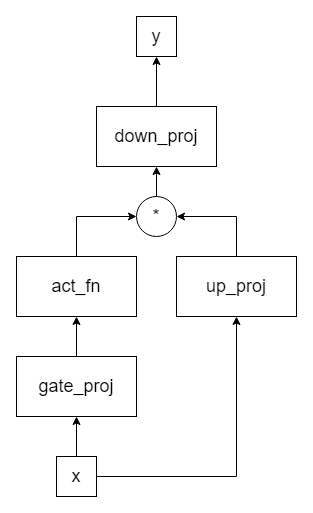
流程图:
-
其中输入为x,输出为y
-
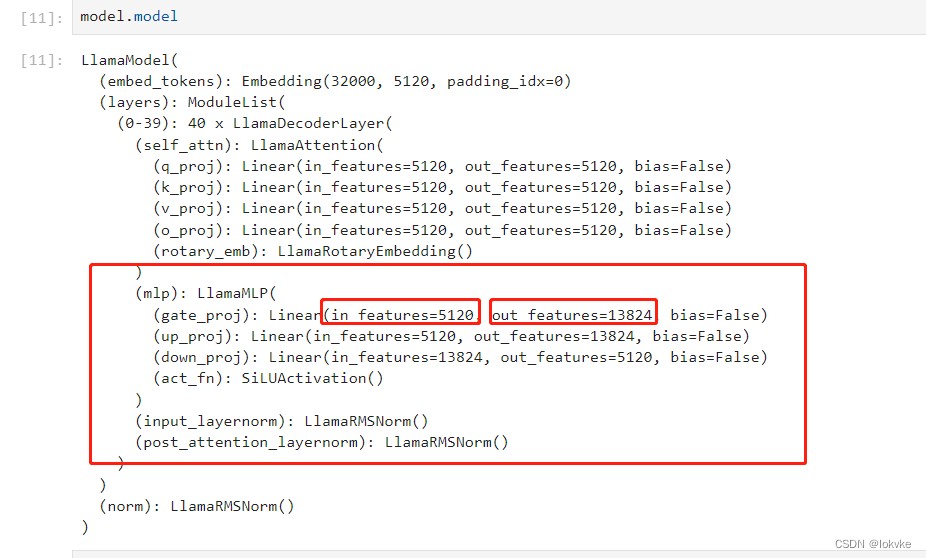
代码中intermediate_size一般比hidden_size大,我们通过在jupyter notebook中打印Llama-13B的模型,可以看到如下所示:
-
总结:MLP模块就是几个nn.Linear的组合
4. LlamaRotaryEmbedding
- 代码如下
class LlamaRotaryEmbedding(torch.nn.Module):def __init__(self, dim, max_position_embeddings=2048, base=10000, device=None):super().__init__()inv_freq = 1.0 / (base ** (torch.arange(0, dim, 2).float().to(device) / dim))self.register_buffer("inv_freq", inv_freq)# Build here to make `torch.jit.trace` work.self.max_seq_len_cached = max_position_embeddingst = torch.arange(self.max_seq_len_cached, device=self.inv_freq.device, dtype=self.inv_freq.dtype)freqs = torch.einsum("i,j->ij", t, self.inv_freq)# Different from paper, but it uses a different permutation in order to obtain the same calculationemb = torch.cat((freqs, freqs), dim=-1)self.register_buffer("cos_cached", emb.cos()[None, None, :, :], persistent=False)self.register_buffer("sin_cached", emb.sin()[None, None, :, :], persistent=False)def forward(self, x, seq_len=None):# x: [bs, num_attention_heads, seq_len, head_size]# This `if` block is unlikely to be run after we build sin/cos in `__init__`. Keep the logic here just in case.if seq_len > self.max_seq_len_cached:self.max_seq_len_cached = seq_lent = torch.arange(self.max_seq_len_cached, device=x.device, dtype=self.inv_freq.dtype)freqs = torch.einsum("i,j->ij", t, self.inv_freq)# Different from paper, but it uses a different permutation in order to obtain the same calculationemb = torch.cat((freqs, freqs), dim=-1).to(x.device)self.register_buffer("cos_cached", emb.cos()[None, None, :, :], persistent=False)self.register_buffer("sin_cached", emb.sin()[None, None, :, :], persistent=False)return (self.cos_cached[:, :, :seq_len, ...].to(dtype=x.dtype),self.sin_cached[:, :, :seq_len, ...].to(dtype=x.dtype),)
- 具体的使用,还调用了另外两个函数,如下所示:
def rotate_half(x):"""Rotates half the hidden dims of the input."""x1 = x[..., : x.shape[-1] // 2]x2 = x[..., x.shape[-1] // 2 :]return torch.cat((-x2, x1), dim=-1)def apply_rotary_pos_emb(q, k, cos, sin, position_ids):# The first two dimensions of cos and sin are always 1, so we can `squeeze` them.cos = cos.squeeze(1).squeeze(0) # [seq_len, dim]sin = sin.squeeze(1).squeeze(0) # [seq_len, dim]cos = cos[position_ids].unsqueeze(1) # [bs, 1, seq_len, dim]sin = sin[position_ids].unsqueeze(1) # [bs, 1, seq_len, dim]q_embed = (q * cos) + (rotate_half(q) * sin)k_embed = (k * cos) + (rotate_half(k) * sin)return q_embed, k_embed-
注意这里的实现跟原始推导有点区别,这里实现的方式如下图所示:
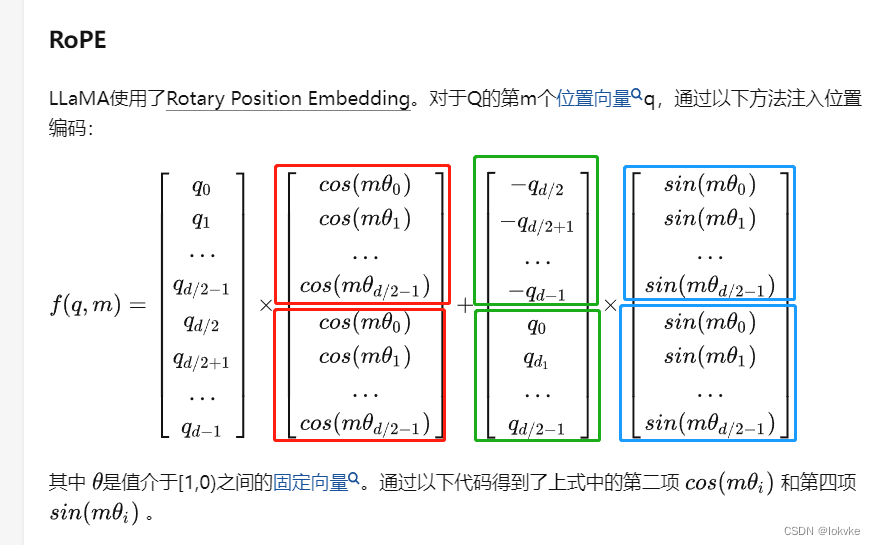
-
原始推导如下图所示:
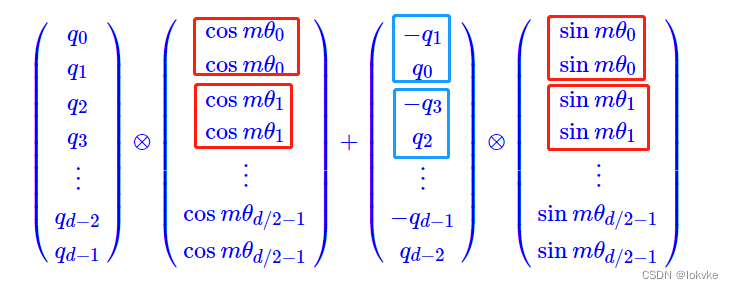
具体可以查看作者的博客:👉戳我👈 -
总结:RoPE就是在attention计算时,K跟Q做内积之前,先给各自注入位置信息。
结束。
相关文章:
Llama模型结构解析(源码阅读)
目录 1. LlamaModel整体结构流程图2. LlamaRMSNorm3. LlamaMLP4. LlamaRotaryEmbedding 参考资料: https://zhuanlan.zhihu.com/p/636784644 https://spaces.ac.cn/archives/8265 ——《Transformer升级之路:2、博采众长的旋转式位置编码》 前言&#x…...

基于XML实现SpringIoC配置
目录 SpringIoc创建与使用的大致步骤 一.基于xml配置SpringIoc 二.基于xml配置DI 三.创建IoC容器并获取组件 SpringIoc创建与使用的大致步骤 SpringIoC的创建与使用过程分为3步 1.编写配置信息(编写XML,注解、Java类) 2.创建IoC容器&…...

Kaniko在containerd中无特权快速构建并推送容器镜像
目录 一、kaniko是什么 二、kaniko工作原理 三、kanijo工作在Containerd上 基于serverless的考虑,我们选择了kaniko作为镜像打包工具,它是google提供了一种不需要特权就可以构建的docker镜像构建工具。 一、kaniko是什么 kaniko 是一种在容器或 Kube…...

分享5款不会被打入冷宫的神器软件
检查一下你最近安装的软件,他们是不是都一样无法避免最终被你打入冷宫的命运?我们明明很懂“在精不在多”的道理,却依然让我们的电脑塞满了形形色色无用的软件。你需要知道的是,如何找到一款适合自己且真正实用的电脑软件。 自…...
Windows如何部署Redis
一、简介 Redis (Remote Dictionary Server) 是一个由意大利人 Salvatore Sanfilippo 开发的 key-value 存储系统,具有极高的读写性能,读的速度可达 110000 次/s,写的速度可达 81000 次/s 。 二、下载 访问 https://github.com/tporadows…...

VUE数据双向绑定原理解析
VUE数据双向绑定原理解析 在Vue.js中,数据双向绑定是一项非常强大的功能。它使开发者能够轻松地将模板与数据进行动态关联,实现了页面和数据之间的实时同步更新。本文将深入探讨VUE中数据双向绑定的原理,并通过代码示例演示其工作机制。 1.…...

SSM商城项目实战:订单管理
SSM商城项目实战:订单管理 在SSM商城项目中,订单管理是一个非常重要的功能模块。本文将详细介绍订单管理的实现思路和步骤代码。 实现SSM商城项目中订单管理功能的思路如下: 设计数据库表结构:根据订单管理的需求,设计…...
SELinux 入门 pt.2
哈喽大家好,我是咸鱼 在《SELinux 入门 pt.1》中,咸鱼向各位小伙伴介绍了 SELinux 所使用的 MAC 模型、以及几个重要的概念(主体、目标、策略、安全上下文) 我们还讲到: 对于受 SELinux 管制的进程,会先…...

函数(个人学习笔记黑马学习)
1、函数定义 #include <iostream> using namespace std;int add(int num1, int num2) {int sum num1 num2;return sum; }int main() {system("pause");return 0; } 2、函数的调用 #include <iostream> using namespace std;int add(int num1, int num2…...

《Flink学习笔记》——第五章 DataStream API
一个Flink程序,其实就是对DataStream的各种转换,代码基本可以由以下几部分构成: 获取执行环境读取数据源定义对DataStream的转换操作输出触发程序执行 获取执行环境和触发程序执行都属于对执行环境的操作,那么其构成可以用下图表示…...

Vue3.0 新特性以及使用变更总结
Vue3.0 在2020年9月正式发布了,也有许多小伙伴都热情的拥抱Vue3.0。去年年底我们新项目使用Vue3.0来开发,这篇文章就是在使用后的一个总结, 包含Vue3新特性的使用以及一些用法上的变更。 图片.png 为什么要升级Vue3 使用Vue2.x的小伙伴都熟悉…...

ToBeWritten之VSOC安全运营
也许每个人出生的时候都以为这世界都是为他一个人而存在的,当他发现自己错的时候,他便开始长大 少走了弯路,也就错过了风景,无论如何,感谢经历 转移发布平台通知:将不再在CSDN博客发布新文章,敬…...

2023爱分析·一站式通信解决方案市场厂商评估报告:牛信云
[图片] 01 中国企业出海发展背景及阶段 出海背景:出海,对中国企业而言,并不陌生。从最初的贸易型出海,到制造业崛起,再到互联网、移动互联网产业腾飞,中国企业在出海道路上走的越发稳健。行业也从最初的家电…...

微信小程序消防知识每天学平台设计与实现
摘 要 消防是当下一个人都需要在日常生活中所高度重视的事项。消防安全关系到居民的日常生活的安全,通过学习消防知识能够提升人们在日常生活中对于灾难的防范。通过对当下的大学生进行调查研究后发现,现在的年轻人在消防意识上比较的单薄,对…...
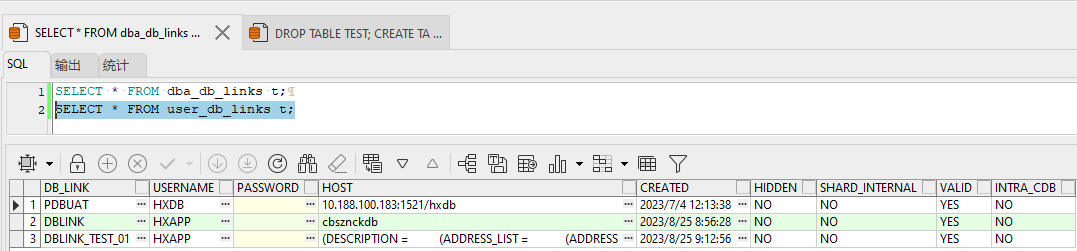
Oracle跨库访问DBLINK
1. DBLINK的介绍 Oracle在进行跨库访问时,可以创建DBLINK实现,比如要将UAT的表数据灌入开发环境,则可以使用UAT库为数据源,通过DBLINK实现将查出的数据灌入开发库。 简而言之就是在当前数据库中访问另一个数据库中的表中的数据 2…...

【vue3.0 组合式API与选项式API是什么,有什么区别】
vue3.0 组合式API与选项式API是什么 Vue3.0中引入了组合式API(Composition API),同时保留了选项式API(Options API)。两种 API 风格都能够覆盖大部分的应用场景。它们只是同一个底层系统所提供的两套不同的接口。实际…...

React配置代理的5种方法
React配置代理的五种方法的介绍 使用create-react-app的代理配置: 使用场景:适用于使用create-react-app创建的React项目,特别是小型项目或快速原型开发。优点:配置简单,无需额外安装依赖,适合快速开发和简…...
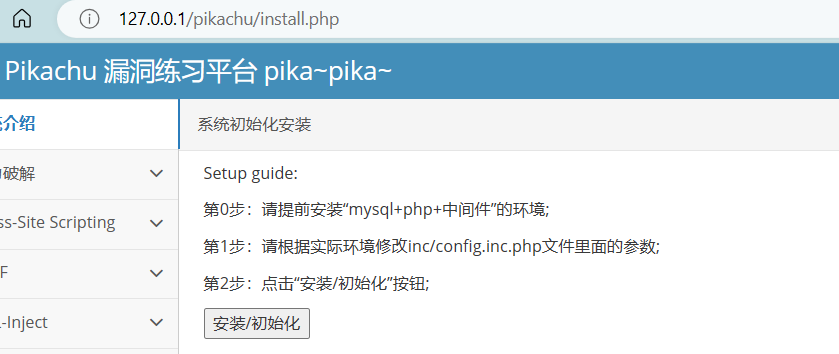
皮卡丘靶场搭建遇到的问题大全
该博客记录我在安装皮卡丘靶场中遇到的一些问题。 1、 phpstudy_pro启动Mysql失败 自己电脑开启了mysql服务,使用winr,services.msc,找到自己的mysql服务,关闭。再次尝试使用phpstudy_pro启动mysql,成功解决。 2、皮…...
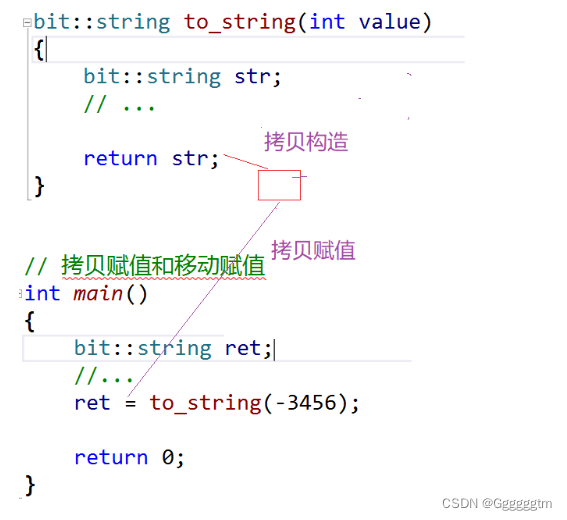
【C++】C++11的新特性(上)
引入 C11作为C标准的一个重要版本,引入了许多令人振奋的新特性,极大地丰富了这门编程语言的功能和表达能力。本章将为您介绍C11的一些主要变化和改进,为接下来的章节铺垫。 文章目录 引入 一、列表初始化 1、1 {} 初始化 1、2 std::initiali…...
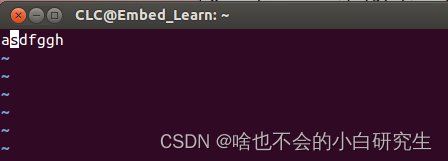
ubuntu学习(四)----文件写入操作编程
1、write函数的详解 ssize_t write(int fd,const void*buf,size_t count); 参数说明: fd:是文件描述符(write所对应的是写,即就是1) buf:通常是一个字符串,需要写入的字符串 count:是每次写入的字节数…...

远程办公三年,我摸索出一套不被“隐形加班”吞噬的方法
作为一名有着三年远程办公经验的软件测试工程师,我深知“隐形加班”如同温水煮青蛙,在不知不觉中吞噬着我们的私人时间与生活热情。从最初的“随时待命”到如今能精准划清工作与生活的界限,我总结出了一套切实可行的方法,希望能帮…...

适配多层级组织管理,科学运用 360 度反馈打造公平高效绩效文化
360度绩效反馈评估是一种从上级、下属、同事、客户等多个维度收集反馈的综合绩效评估方法,通过多源数据消除单一评价者的主观偏差,帮助企业获得更全面、客观的员工能力画像。相比传统的上级单向评价,360度反馈能将评估准确度提升40%以上&…...

ARMv8通用定时器架构与CNTHP_CTL_EL2寄存器详解
1. AArch64通用定时器架构概述在ARMv8架构中,通用定时器系统为操作系统和应用程序提供了精确的时间基准。这套计时系统由一组相互关联的组件构成,包括物理计数器、虚拟计数器以及多个比较器。作为系统程序员,理解这套机制对开发底层系统软件至…...

Unity TMP InputField光标稳定方案:字体、渲染与输入法深度适配
1. 为什么InputField光标会“消失”、错位、卡死——不是Bug,是渲染管线的底层博弈 你有没有在Unity项目里遇到过这样的场景:UI界面一切正常,唯独InputField的光标不显示;或者光标明明在文字末尾,点击却跳到中间&#…...

详细讲解 Spring MVC 的 HandlerInterceptor 接口
目录 一、核心定位 二、接口完整定义 三、三个核心方法详解(执行顺序 作用) 1. preHandle () —— 【请求前置处理】 2. postHandle () —— 【请求后置处理】 3. afterCompletion () —— 【请求完成清理】 四、执行流程(生命周期&a…...

深夜连上服务器,我再也不想敲命令行
前言 那是晚上十一点,我第五次输错IPtables规则,服务器直接失联了。赶紧给机房打电话,求助工程师帮忙重启。电话里听着对方说"下次小心点",我只能苦笑——命令行这东西,真不是熬夜能hold住的。 就在这时&a…...

38 - Go 命令行参数处理:从 os.Args 到 flag 的底层设计
文章目录38 - Go 命令行参数处理:从 os.Args 到 flag 的底层设计为什么需要命令行参数?命令行参数的本质最基础的参数处理:os.Args基础使用示例获取单个参数flag 标准库:Go 官方参数解析器最简单的 flag 示例为什么 flag.String 返…...

大模型的伦理与合规:隐私保护、偏见与安全问题
在大模型技术深度渗透各行业的当下,软件测试从业者正站在保障AI技术负责任发展的关键节点。从医疗诊断辅助系统到金融风控模型,大模型的每一次输出都关乎用户权益与社会公平。作为质量把关人,测试从业者需突破传统软件测试边界,构…...

基于少样本学习和思维链提示的知识概念抽取方法研究
佘霖琳 熊龙洋 陆雪松(华东师范大学数据科学与工程学院,上海 200062)摘 要 知识概念抽取在教育、医疗、金融领域均有重要的应用价值。知识概念抽取属于命名实体识别的一个细分任务,但是由于缺乏数据集和知识概念实体类型的特殊性&…...

Pulover‘s Macro Creator:你的数字助手,让电脑学会“自己工作“
Pulovers Macro Creator:你的数字助手,让电脑学会"自己工作" 【免费下载链接】PuloversMacroCreator Automation Utility - Recorder & Script Generator 项目地址: https://gitcode.com/gh_mirrors/pu/PuloversMacroCreator 你是否…...