moveit 2源码编译
文章目录
- 前言
- 下载编译过程
- 创建开发环境
- 拉取源代码
- 更新rosdep
- 下载安装moveit 2依赖包
- 编译源码
- 输出结果
- 总结
前言
本文用来记录moveit 2从源码编译的全流程。
本机环境:
系统:debian 11
ros版本:ros2 humble
处理器:intel i7
内存:16g
下载编译过程
创建开发环境
$ cd ~
$ mkdir workspace
拉取源代码
方法1:博主导入了本地源会快一些
$ cd ~/workspace
$ git clone https://gitee.com/lilinxin75/moveit2.git -b humble --depth=1
$ mkdir deps
$ cd deps
$ git clone https://gitee.com/lilinxin75/moveit_msgs.git -b humble --depth=1
$ git clone https://gitee.com/lilinxin75/moveit_resources.git -b humble --depth=1
$ git clone https://gitee.com/lilinxin75/ros2_control.git -b humble --depth=1
$ git clone https://gitee.com/lilinxin75/control_msgs.git -b humble --depth=1
$ git clone https://gitee.com/lilinxin75/realtime_tools.git --depth=1
$ git clone https://gitee.com/lilinxin75/object_recognition_msgs.git -b ros2 --depth=1
方法二:使用官方源
$ cd ~/workspace
$ git clone https://github.com/ros-planning/moveit2.git -b $ROS_DISTRO --depth=1
$ mkdir deps
$ cd deps
$ git clone https://github.com/ros-planning/moveit_msgs.git -b humble --depth=1
$ git clone https://github.com/ros-planning/moveit_resources.git -b humble --depth=1
$ git clone https://github.com/ros-controls/ros2_control.git -b humble --depth=1
$ git clone https://github.com/ros-controls/control_msgs.git -b humble --depth=1
$ git clone https://github.com/ros-controls/realtime_tools.git --depth=1
$ git clone https://github.com/wg-perception/object_recognition_msgs.git -b ros2 --depth=1
更新rosdep
$ rosdep init
$ rosdep update
rosdep update出错解决办法,下载文件替换法——No such file or directory: ‘/etc/ros/rosdistro/master/index-v4.yaml
下载安装moveit 2依赖包
$ rosdep install -r --from-paths . --ignore-src --rosdistro $ROS_DISTRO -y# result
# $ rosdep install -r --from-paths . --ignore-src --rosdistro $ROS_DISTRO -y# All required rosdeps installed successfully
编译源码
# --parallel-workers 2 意思是限制同时编译项目为2个,默认值为cpu核数,不设置该值会占用大量内存
$ colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --parallel-workers 2
关于colcon构建参数可以参照下边的链接:
ROS2构建工具colcon介绍
输出结果
$ colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --parallel-workers 2
Starting >>> object_recognition_msgs
Starting >>> moveit_common...Starting >>> moveit_setup_core_plugins
Starting >>> moveit_setup_srdf_plugins
Finished <<< moveit_runtime [0.30s]
Finished <<< moveit_setup_core_plugins [0.57s]
Finished <<< moveit_setup_app_plugins [0.65s]
Finished <<< moveit_setup_controllers [0.80s]
Finished <<< moveit_setup_srdf_plugins [0.79s]
Starting >>> moveit_setup_assistant
Finished <<< moveit_setup_assistant [0.35s]
Starting >>> moveit
Finished <<< moveit [0.19s] Summary: 58 packages finished [13.6s] 4 packages had stderr output: controller_manager moveit_configs_utils ros2controlcli rqt_controller_manager
总结
在整体编译过程中也遇到了不少的坑,在本文做简单记录。
后续会逐步整理如何调用Moveit2做一些特定功能的开发。
相关文章:

moveit 2源码编译
文章目录前言下载编译过程创建开发环境拉取源代码更新rosdep下载安装moveit 2依赖包编译源码输出结果总结前言 本文用来记录moveit 2从源码编译的全流程。 本机环境: 系统:debian 11 ros版本:ros2 humble 处理器:intel i7 内存&a…...
2022年全国职业院校技能大赛(中职组)网络安全竞赛试题A模块(4)
目录 二、竞赛注意事项 (本模块20分) 一、项目和任务描述: 二、服务器环境说明 三、具体任务(每个任务得分以电子答题卡为准) A-1任务一 登录安全加固(Windows) 1.密码策略 a.更改或创建…...
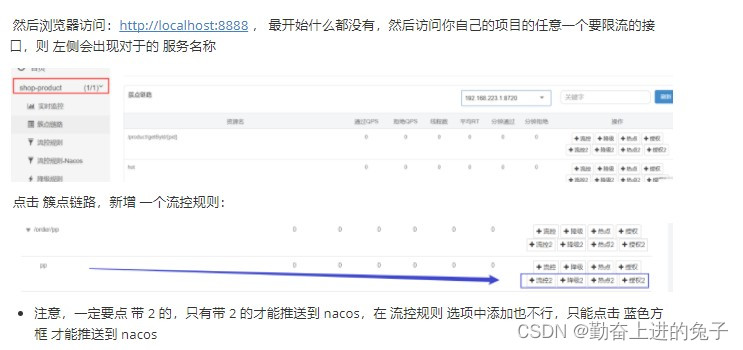
微服务保护之sentinel熔断器
文章目录 目录 文章目录 前言 一、解决微服务雪崩的问题 二、使用步骤 三、熔断器的使用 3.1 限流规则 3.1.1流控模式 3.1.2流控效果 3.2 隔离和降级 3.2.1 隔离 3.2.2 降级 四、sentinel规则持久化 总结 前言 在基于 SpringCloud 构建的微服务体系中,服务间的调用…...

电动打气泵方案开发--鼎盛合PCBA方案
开车的每一个司机都必须要知道一个事情——定期检查轮胎气压是否正常,因为轮胎胎压不足会导致轮胎过早磨损,从而造成容易发生道路交通事故,并且对汽车的操控性和牵引力带来不良影响,甚至会出现爆胎或汽车失控等极其危险的事故。电…...
)
第十三届蓝桥杯省赛 C++ A 组 F 题、Java A 组 G题、C组 H 题、Python C 组 I 题——青蛙过河(AC)
目录1.青蛙过河1.题目描述2.输入格式3.输出格式4.样例输入5.样例输出6.数据范围7.原题链接2.解题思路Ac_code1.C2.Java1.青蛙过河 1.题目描述 小青蛙住在一条河边, 它想到河对岸的学校去学习。小青蛙打算经过河里 的石头跳到对岸。 河里的石头排成了一条直线, 小青蛙每次跳跃…...

django项目实战四(django+bootstrap实现增删改查)进阶时间控件
接上一篇《django项目实战三(djangobootstrap实现增删改查)进阶分页》 知识点: 使用bootstrap-datepicker实现时间控件 一、优化layout.html模版 主要新增2个块 {% block css %}{% endblock %}{% block js %}{% endblock %} {% load static…...

Jetpack之ViewModel
The ViewModel class is a business logic or screen level state holder. 上面是官方给的定义,ViewModel 类是业务逻辑或屏幕级状态持有者。 一、业务逻辑持有者 在此之前,无论是MVC模式,还是MVP模式,在视图层,都会…...
追梦之旅【数据结构篇】——详解C语言动态实现顺序表
详解C语言动态实现顺序表~😎前言🙌顺序表概念及结构🙌功能函数的具体实现分析:🙌尾插函数具体实现:尾删函数具体实现:头插函数具体实现:头删插函数具体实现:任意插函数具…...

xss基础
目录标题一、XSS的原理二、XSS漏洞分类1、反射型xss2、存储型XSS3、基于DOM的XSS三、XSS漏洞的危害及验证四、XSS漏洞的黑盒测试五、XSS漏洞的白盒测试一、XSS的原理 跨站脚本攻击XSS(Cross Site Scripting),为了不和层叠样式表(…...
移动WEB开发二、流式布局
零、文章目录 文章地址 个人博客-CSDN地址:https://blog.csdn.net/liyou123456789个人博客-GiteePages:https://bluecusliyou.gitee.io/techlearn 代码仓库地址 Gitee:https://gitee.com/bluecusliyou/TechLearnGithub:https:…...

分享在线预约系统制作步骤_在线预约链接怎么做
在微信小程序上进行在线预约,不管是商家还是顾客,都可以自由选择时间,顾客还可以通过预约小程序,了解到所选服务的详情和功能特色,不必等到去店内听介绍,顾客能节省等候时间,商家能解放招待人力…...

【每日一题Day125】LC1326灌溉花园的最少水龙头数目 | 动态规划 贪心
灌溉花园的最少水龙头数目【LC1326】 在 x 轴上有一个一维的花园。花园长度为 n,从点 0 开始,到点 n 结束。 花园里总共有 n 1 个水龙头,分别位于 [0, 1, ..., n] 。 给你一个整数 n 和一个长度为 n 1 的整数数组 ranges ,其中 …...
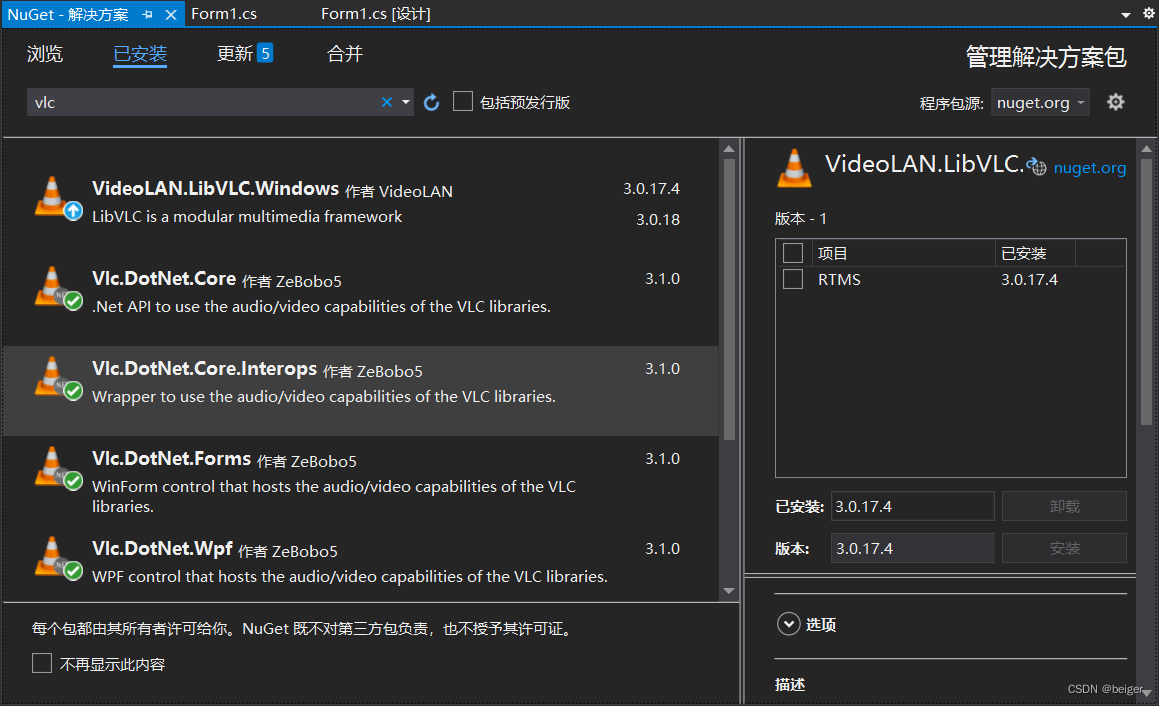
C# FFmpeg推流Vlc.DotNet拉流优化参数
FFmpeg是流媒体开源神器,视频转换、剪裁包括推流,无所不能,很多系统都是基于其开发的。拉流可以用FFplay,但是不利于集成到自己的代码中,因此拉流选择了Vlc.DotNet。 在使用中,仅使用默认参数,…...
)
pnpm v8版本升级变化关注点(前瞻速攻版)
前言 pnpm v8.0.0-alpha.0 版本已经发布,包含少量变化,但其中还是有令人在意的点的。 本文将默认读者拥有大部分 pnpm v7 版本的知识储备,进行 v8 版本的前瞻速攻。 安装方法 目前通过指定 Tag 方式可以安装 v8 alpha 版: npm…...
Python基础-环境安装
Python安装1.下载PythonPython网址:https://www.python.org/进入Python官网,点击Downloads,选择自己对应的操作系统(此处以Windows为例)在左侧的稳定发行版中,选择一个3.5版本以上的,然后点击对…...

重载、重写、重构概念辨析
首先,重载、重写、重构都表现为方法名相同 重载 重载(overload),表示同一类的方法之间的关系,至少有以下其中一种情况 参数个数不同参数类型不同参数顺序不同 注意,返回值类型不同不能作为重载依据 重…...
第九章 - 多表查询(join,left join 等)与合并查询(union union all)
第九章 - 多表查询(join,left join 等)与合并查询(union)交叉链接(笛卡尔积)内连接查询外连接查询左链接: left join右链接:right join组合查询 union & union all使…...
matplotlib学习笔记(持续更新中…)
目录 1. 安装,导入 2. figure,axes(图形,坐标图形) 2.1 figure对象 2.2 axes对象 2.3 代码演示 2.3 subplot() 方法 3. 图表的导出 3.1 savefig() 方法 3.2 代码演示 1. 安装,导入 pip install m…...
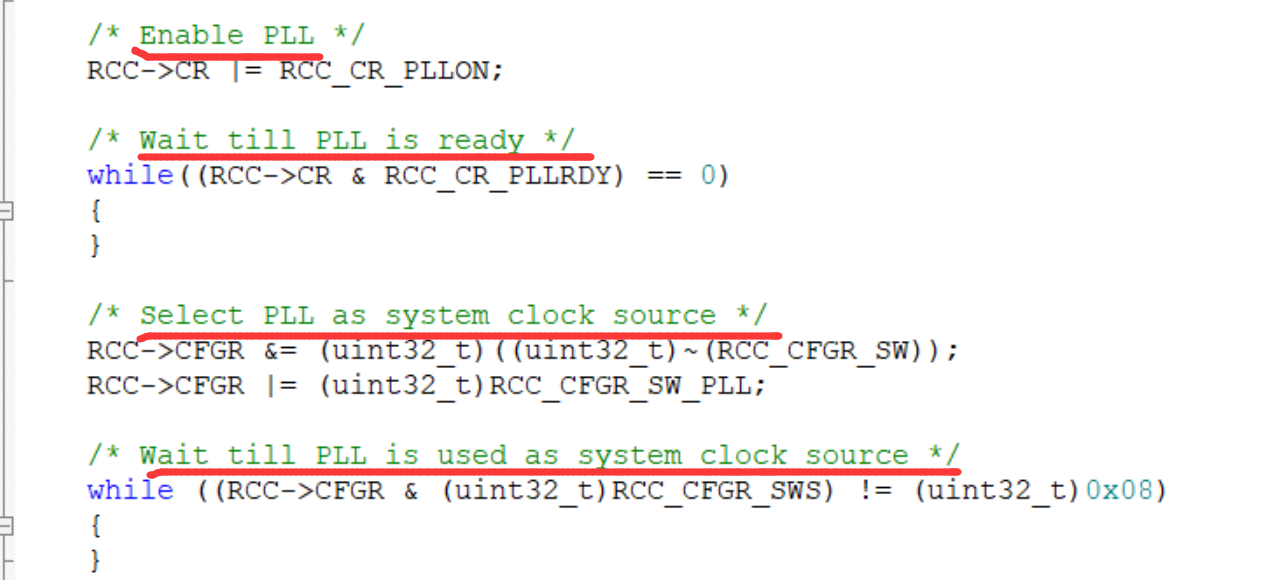
STM32 SystemInit()函数学习总结
拿到程序后如何看系统时钟?User文件夹——system_stm32f4xx程序,先找systemcoreclock(系统时钟)但是这里这么多个系统时钟应该如何选择?点击魔法棒,然后点击C/C可以看到define的是F40_41XXX.USE这一款 ,对应着就找出了…...
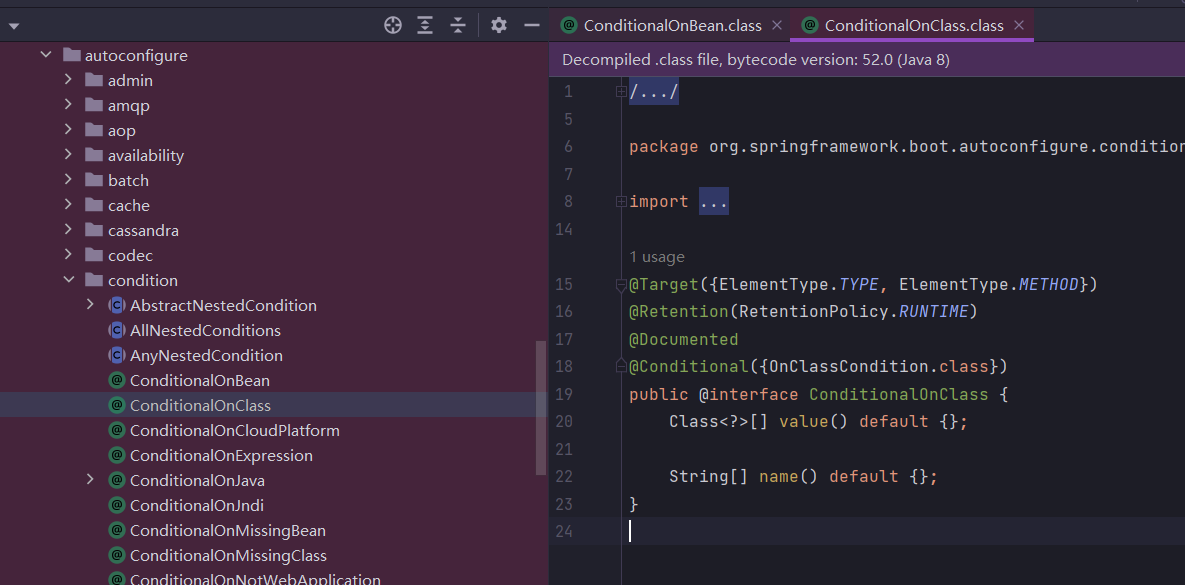
【Spring Boot 原理分析】- 自动配置
【Spring Boot 原理分析】- 自动配置 Condition 注解 Condition 是 Spring 4.0 增加的条件判断功能,通过这个功能可以实现选择的创建 Bean 操作 👑 我们在使用 Spring 的时候,只需导入某个依赖的坐标,就可以直接通过 Autwired 注…...

信息系统项目管理师核心知识点精讲
一、项目整合管理(重点:项目章程与项目管理计划) 知识点详解: 项目整体管理是项目管理知识体系的核心,它确保项目各要素协调统一。在考试中,特别要掌握项目章程和项目管理计划的区别与联系。 项目章程是项目的“出生证明”,由项目发起人发布。它正式授权项目,赋予项…...

AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了
AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了2026年真正值得重视的AI底层能力,是让模型知道该信谁 你有没有发现一个很扎心的变化。 以前我们用AI,最怕它不会。 现在我们用AI,最怕它太会了。 它能写…...

中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程
中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 掌握中兴光猫的设备管理和权限获取能力是网络管理员和技术爱好者…...

LVGL多页面开发避坑:用内部Timer替代轮询,解决页面切换时的内存踩踏问题
LVGL多页面开发中的内存安全实践:用Timer机制替代轮询的工程解决方案 在嵌入式UI开发中,LVGL因其轻量级和跨平台特性成为热门选择。但当项目复杂度提升到多页面交互时,开发者往往会遇到一个棘手问题:如何在频繁切换页面的同时保证…...

如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造
如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造 【免费下载链接】redux-dynamic-modules Modularize Redux by dynamically loading reducers and middlewares. 项目地址: https://gitcode.com/gh_mirrors/re/redux-dynamic-modules Redux Dyn…...

MaxEnt建模总失败?别急着换数据,先检查ArcGIS裁剪栅格这1个像素的坑
MaxEnt建模失败?ArcGIS栅格裁剪的1像素陷阱与精准修复指南当你花费数小时整理好WorldClim气候数据、本地DEM高程和物种分布数据,满心期待地点击MaxEnt的运行按钮时,屏幕上突然跳出"Error projecting, two layers have different geograp…...
)
内存申请和使用的场景分析(以AP->kernal->ISP为例)
在 ISP(Image Signal Processor)系统中,AP 与 ISP 之间的内存交互本质上是一个**“AP 申请可 DMA 访问的共享内存 → 内核建立映射 → 硬件寻址读写 → 同步与回收”**的过程。下面按数据流分层详细拆解。一、ISP 内存需求的特殊性 与普通应用…...

终极指南:5步掌握Cursor AI Pro完整功能免费解锁技巧
终极指南:5步掌握Cursor AI Pro完整功能免费解锁技巧 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tria…...

修复 PowerShell 7 下 conda activate 报错的指南
修复 PowerShell 7 下 conda activate 报错的指南 适用场景:升级到 PowerShell 7.x 后,conda activate 突然报错,但 Windows PowerShell 5.1 正常。 发布日期:2026-05-24 适用版本:conda 23.x PowerShell 7.x 一、问题…...

Unity中文语言包安装失败?手动部署全流程详解
1. 为什么Unity编辑器中文语言包总在安装时“卡住”或报错? Unity编辑器自带多语言支持,但中文语言包的安装过程却常年被开发者吐槽——点开Preferences → Localization → Install Language Pack,选中Chinese (Simplified),点击…...