【Unity每日一记】WheelColider组件汽车游戏的关键

👨💻个人主页:@元宇宙-秩沅
👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅!
👨💻 本文由 秩沅 原创
👨💻 收录于专栏:unity每日一记
⭐🅰️推荐文章⭐
⭐【软件设计师高频考点暴击】
⭐【Unityc#专题篇】之c#系统化大礼包】
⭐【unity数据持久化】数据管理类_PlayerPrfs
⭐【unity本站最全系列】unity常用API大全一篇文章足以
⭐WheelColiderz组件汽车游戏的关键⭐

文章目录
- ⭐🅰️推荐文章⭐
- ⭐WheelColiderz组件汽车游戏的关键⭐
- 🎶(==A==) 关键API知识
- 🎶(==B==) 参数一览
- 🎶(==C==) 扭矩力
- 🎶(==D==) 阿克曼转向
- 🎶(==E==) 汽车下压力
- 🎶(==F==) 汽车质心
- 🎶(==G==) 发动机相关
- 🎶(==H==) 自动挡位变速箱
- ⭐🅰️系统路线学习点击跳转⭐
- 四最终代码
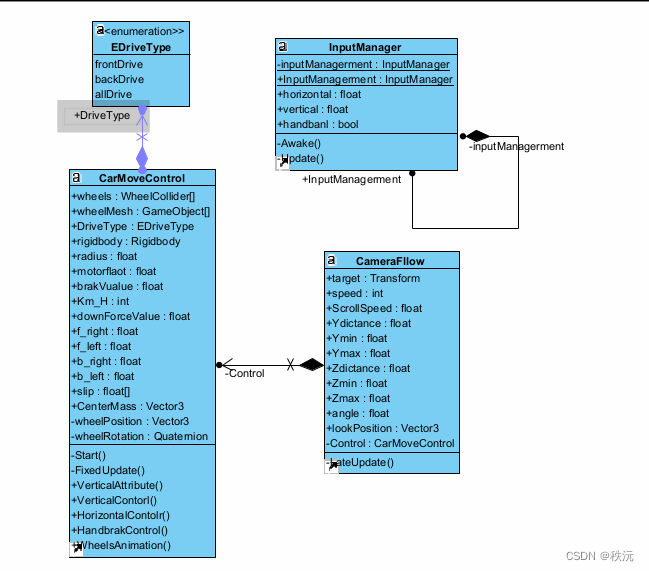
- CarMoveContorl
- CameraFllow
- InputMana
🎶(A) 关键API知识
| API | 解释 |
|---|---|
| motorTorque | 扭矩力: |
| brakeTorque | 制动扭矩:刹车 |
| Radius | 碰撞器车轮半径 |
| Wheel Damping rate | 车轮阻尼率 |
| GetWorldPose(out wheelPosition, out wheelRotation); | 获取碰撞器当前的空间位置和空间角度。 |
| steerAngle | 车轮碰撞器的转向。 |
| GetGroundHit | 车轮的地面碰撞数据。 |
| rpm | 当前轮轴转速(以每分钟转数为单位)。 |
| isGrounded | 车轮是否在空中(只读) |
| WheelHit参数 | 说明 |
|---|---|
| collider | T另一个碰撞机的轮子正在撞击。 |
| force | 施加在接触上的力的大小。 |
| forwardDir | 滚轮指向的方向。. |
| forwardSlip | 轮胎在滚动方向上打滑。加速滑移为负,制动滑为正 |
| normal | 接触点的正常。. |
| point | T车轮与地面之间的接触点。 |
| sidewaysDir | 车轮的侧向方向。l. |
| sidewaysSlip | 侧身滑 轮胎向侧向打滑。. |
| rpm | 当前轮轴转速(以每分钟转数为单位)。(只读). |
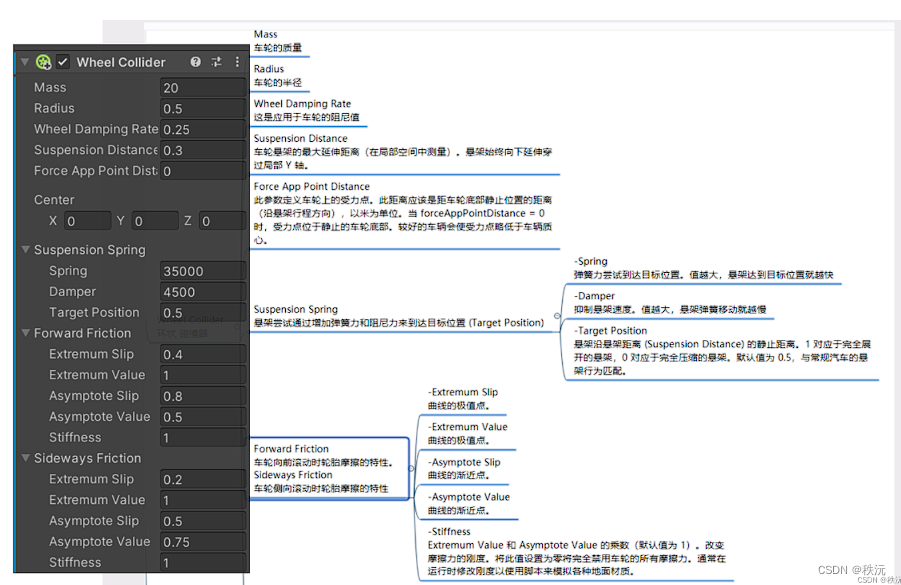
🎶(B) 参数一览
🎶(C) 扭矩力
知识百科:什么是扭矩力?
扭矩是指发动机运转时从曲轴端输出的平均力矩,俗称为发动机的“转劲”,是 发动机性能 的一个重要参数,扭矩越大,发动机输出的“劲”越大,曲轴转速的变化也越快,汽车的爬坡能力、起步速度和加速性也越好。
🎶(D) 阿克曼转向
引用:阿克曼转向是一种现代汽车的转向方式,也是移动机器人的一种运动模式,在汽车转弯的时候,内外轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎
- 后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小
if (horizontal > 0 ) {
//后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * horizontal;} else if (horizontal < 0 ) { wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * horizontal;} else {wheels[0].steerAngle =0;wheels[1].steerAngle =0;}
🎶(E) 汽车下压力
知识百科: 什么是下压力
下压力是车在行进中空气在车体上下流速不一产生的,使空气的总压力指向地面从而增加车的抓地力.
速度越大,下压力越大,抓地更强,越不易翻车

- 关键代码
//-------------下压力添加-----------------//速度越大,下压力越大,抓地更强rigidbody.AddForce(-transform.up * downForceValue * rigidbody.velocity .magnitude );
🎶(F) 汽车质心
知识百科:什么是质心?——质量中心
汽车制造商在设计汽车时会考虑质心的位置和重心高度,以尽可能减小质心侧偏角。 一些高性能汽车甚至会采用主动悬挂系统来控制车身侧倾,从而减小质心侧偏角,提高车辆的稳定性和操控性。
🎶(G) 发动机相关
发动机功率=扭矩转速n
知识百科:说到汽车发动机,要了解几个参数。排量,功率,扭矩,转速。那么这里和参数之间的关系如何,
排量,就是发动机气缸排出气体的多少。因此说到排量,不管四缸,三缸,二缸,一缸,只要大小一样,排量就相同。
功率,单位时间内做功的多少。那么排量越大,单位时间做功就会越多,因此,排量越大,功率也会越大。
扭矩,它的单位是N·M,所以它是力运动单位距离的结果。它反应的是加速度。扭矩越大,加速能力就越强。
转速,它是单位时间内齿轮转动的圈数。齿轮转的越快,传输给轮胎的转速就越高,车子就跑的越快。
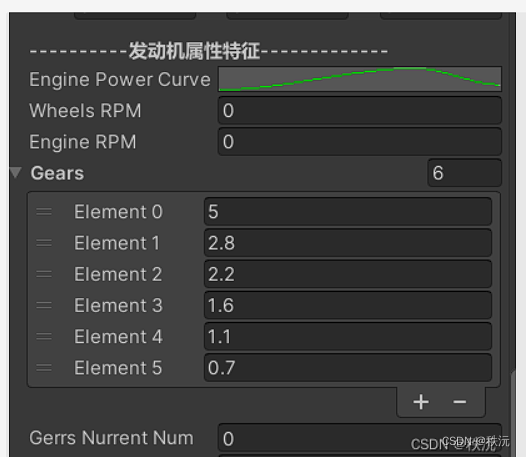
//汽车引擎发动机相关public void CarEnginePower(){WheelRPM();//将轮轴的转速获取// 扭矩力(发动机功率) = 功率=扭矩*转速*nmotorflaot = -enginePowerCurve.Evaluate(engineRPM) * gears[gerrsNurrentNum];float velocity = 0.0f;//发动机的转速 与 车轮转速 和 挡位比率 成比例engineRPM = Mathf.SmoothDamp(engineRPM, 1000 + Mathf.Abs (wheelsRPM) * 3.6f * (gears[gerrsNurrentNum]), ref velocity, smoothTime);print(engineRPM);VerticalContorl(); //驱动管理shifterGearsChange(); //换挡管理}//获得车轮的转速public void WheelRPM(){float sum = 0;for (int i = 0; i < 4; i++){sum += wheels[i].rpm;}//四个车轮轮轴的平均转速wheelsRPM = sum / 4;}//换挡管理public void shifterGearsChange(){if(InputManager.InputManagerment .addGears ) //如果按下E键,加挡{if(gerrsNurrentNum < gears.Length - 1 )gerrsNurrentNum++;}if(InputManager.InputManagerment.lowGears ) //如果按下Q键,减档{if (gerrsNurrentNum > 0)gerrsNurrentNum--;}}
🎶(H) 自动挡位变速箱

不仅仅是发动机牵引着汽车去运动。是发动机跟轮胎一起控制汽车去前进,我们前面没有添加发动机,就是靠轮胎的扭矩力去控制汽车的前进
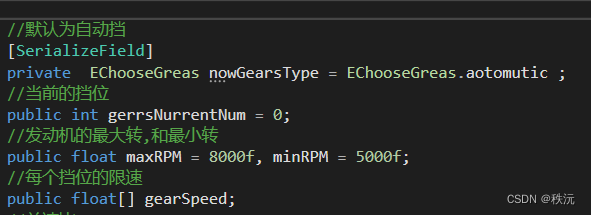
怎么来理解自动档位变速箱呢?当发动机。每个档位的发动机。它超过八千转的时候就要换挡了。所以当我们现在设置发动机的最大转是八千,最小转是五千,超过八千转我们就自动加档。小于了五千转,我们就自动减档。——这个最大转和最小转是模拟跑车的。
当然,判断换挡的依据不仅仅是靠超过最大的这个发动机的最大转,连同每个档位设置的那个限速作为一起判断依据。如下图所示,每个档位的限速如果超过了这个限速,并且超过了最大转速,我们就换挡。
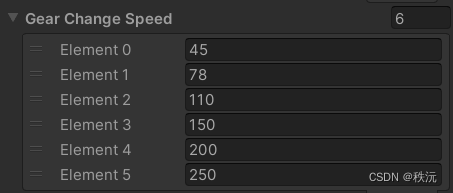
//换挡管理//换挡管理public void shifterGearsChange(){switch (nowGearsType){//档位类型是手动档的时候case EChooseGreas.handMovement:if (InputManager.InputManagerment.addGears) //如果按下E键,加挡{if (gerrsNurrentNum < gears.Length - 1)gerrsNurrentNum++;}if (InputManager.InputManagerment.lowGears) //如果按下Q键,减档{if (gerrsNurrentNum > 0)gerrsNurrentNum--;}break;//档位类型是自动档的时候handMovementcase EChooseGreas.aotomutic://如果车子不在地面不会自动换档if (!IsGrounp()) return;//当发动机转速大于最高转速 并且 速度也超过了相应挡位的限速 ,数组不越界 并且不是倒车 就加档if (engineRPM > maxRPM && Km_H >= gearSpeed[gerrsNurrentNum] && gerrsNurrentNum < gears.Length - 1 && !BackCar())gerrsNurrentNum++;//当发动机小于最小转时 减档 (此时未加判断是因为就是要 更好的减速)if (engineRPM < minRPM && gerrsNurrentNum > 0)gerrsNurrentNum--;break;default:break;}⭐🅰️系统路线学习点击跳转⭐
⭐【Unityc#专题篇】之c#进阶篇】
⭐【Unityc#专题篇】之c#核心篇】
⭐【Unityc#专题篇】之c#基础篇】
⭐【Unity-c#专题篇】之c#入门篇】
⭐【Unityc#专题篇】—进阶章题单实践练习
⭐【Unityc#专题篇】—基础章题单实践练习
⭐【Unityc#专题篇】—核心章题单实践练习
你们的点赞👍 收藏⭐ 留言📝 关注✅是我持续创作,输出优质内容的最大动力!、

四最终代码
CarMoveContorl
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 车轮的运动
//___________创建者:_______秩沅________
//_____________________________________
//-------------------------------------//驱动模式的选择
public enum EDriveType
{frontDrive, //前轮驱动backDrive, //后轮驱动allDrive //四驱
}public class CarMoveControl : MonoBehaviour
{//-------------------------------------------//四个轮子的碰撞器public WheelCollider[] wheels ;//网格的获取public GameObject[] wheelMesh;//初始化三维向量和四元数private Vector3 wheelPosition = Vector3.zero;private Quaternion wheelRotation = Quaternion.identity;//-------------------------------------------//驱动模式选择 _默认前驱public EDriveType DriveType = EDriveType.frontDrive;//----------车辆属性特征-----------------------//车刚体public Rigidbody rigidbody;//轮半径public float radius = 0.25f;//扭矩力度public float motorflaot = 8000f;//刹车力public float brakVualue = 800000f;//速度:每小时多少公里public int Km_H;//下压力public float downForceValue = 1000f; //四个轮胎扭矩力的大小public float f_right;public float f_left;public float b_right;public float b_left;//车轮打滑参数识别public float[] slip ;//质心public Vector3 CenterMass;//一些属性的初始化private void Start(){rigidbody = GetComponent<Rigidbody>();slip = new float[4];}private void FixedUpdate(){VerticalAttribute();//车辆物理属性管理WheelsAnimation(); //车轮动画VerticalContorl(); //驱动管理HorizontalContolr(); //转向管理HandbrakControl(); //手刹管理}//车辆物理属性相关public void VerticalAttribute(){//---------------速度实时---------------//1m/s = 3.6km/hKm_H =(int)(rigidbody.velocity.magnitude * 3.6) ;Km_H = Mathf.Clamp( Km_H,0, 200 ); //油门速度为 0 到 200 Km/H之间//--------------扭矩力实时---------------//显示每个轮胎的扭矩f_right = wheels[0].motorTorque;f_left = wheels[1].motorTorque;b_right = wheels[2].motorTorque;b_left = wheels[3].motorTorque;//-------------下压力添加-----------------//速度越大,下压力越大,抓地更强rigidbody.AddForce(-transform.up * downForceValue * rigidbody.velocity .magnitude );//-------------质量中心同步----------------//质量中心越贴下,越不容易翻rigidbody.centerOfMass = CenterMass;}//垂直轴方向运动管理(驱动管理)public void VerticalContorl(){switch (DriveType){case EDriveType.frontDrive: //选择前驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length - 2; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical *(motorflaot / 2); //扭矩马力归半}}else{for (int i = 0; i < wheels.Length - 2; i++){//扭矩力度wheels[i].motorTorque = 0; }}break;case EDriveType.backDrive://选择后驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 2; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * (motorflaot / 2); //扭矩马力归半}}else{for (int i = 2; i < wheels.Length ; i++){//扭矩力度wheels[i].motorTorque = 0;}}break;case EDriveType.allDrive://选择四驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * ( motorflaot / 4 ); //扭矩马力/4}}else{for (int i = 0; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = 0;}}break;default:break;}}//水平轴方向运动管理(转向管理)public void HorizontalContolr(){if (InputManager.InputManagerment.horizontal > 0){//后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else if (InputManager.InputManagerment.horizontal < 0){wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else{wheels[0].steerAngle = 0;wheels[1].steerAngle = 0;}}//手刹管理public void HandbrakControl(){if(InputManager.InputManagerment .handbanl ){//后轮刹车wheels[2].brakeTorque = brakVualue;wheels[3].brakeTorque = brakVualue;}else{wheels[2].brakeTorque = 0;wheels[3].brakeTorque = 0;}//------------刹车效果平滑度显示------------for (int i = 0; i < slip.Length; i++){WheelHit wheelhit;wheels[i].GetGroundHit(out wheelhit);slip[i] = wheelhit.forwardSlip; //轮胎在滚动方向上打滑。加速滑移为负,制动滑为正}}//车轮动画相关public void WheelsAnimation(){for (int i = 0; i < wheels.Length ; i++){//获取当前空间的车轮位置 和 角度wheels[i].GetWorldPose(out wheelPosition, out wheelRotation);//赋值给wheelMesh[i].transform.position = wheelPosition;wheelMesh[i].transform.rotation = wheelRotation * Quaternion .AngleAxis (90,Vector3 .forward );}}
}CameraFllow
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 相机的跟随
//___________创建者:秩沅_______________
//_____________________________________
//-------------------------------------
public class CameraFllow : MonoBehaviour
{//目标物体public Transform target;private CarMoveControl Control;public int speed;//鼠标滑轮的速度public float ScrollSpeed = 45f;//Y轴差距参数public float Ydictance = 0f; public float Ymin = 0f;public float Ymax = 4f;//Z轴差距参数public float Zdictance = 4f;public float Zmin = 4f;public float Zmax = 8f;//相机看向的角度 和最終位置public float angle = -25 ;public Vector3 lookPosition;void LateUpdate(){//Z轴和Y轴的距离和鼠标滑轮联系Ydictance += Input.GetAxis("Mouse ScrollWheel") * ScrollSpeed * Time.deltaTime;//平滑效果Zdictance += Input.GetAxis("Mouse ScrollWheel") * ScrollSpeed * Time.deltaTime;//設置Y軸和x轴的滚轮滑动范围 Ydictance = Mathf.Clamp(Ydictance , Ymin ,Ymax ) ; Zdictance = Mathf.Clamp(Zdictance , Zmin, Zmax ) ;//确定好角度,四元数 * 三维向量 = 三维向量lookPosition = Quaternion.AngleAxis(angle, target .right) * -target.forward ;//更新位置transform.position = target.position + Vector3.up * Ydictance - lookPosition * Zdictance ;//更新角度transform.rotation = Quaternion.LookRotation(lookPosition);//实时速度Control = target.GetComponent<CarMoveControl>();speed = (int )Control.Km_H / 4;speed = Mathf.Clamp(speed,0, 55 ); //对应最大200公里每小时}
}InputMana
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 输入控制管理器
//___________创建者:秩沅_______________
//_____________________________________
//-------------------------------------
public class InputManager : MonoBehaviour
{//单例模式管理static private InputManager inputManagerment;static public InputManager InputManagerment => inputManagerment;public float horizontal; //水平方向动力值public float vertical; //垂直方向动力值public bool handbanl; //手刹动力值void Awake(){inputManagerment = this;}void Update(){//与Unity中输入管理器的值相互对应horizontal = Input.GetAxis("Horizontal");vertical = Input.GetAxis("Vertical");handbanl = Input.GetAxis("Jump")!= 0 ? true :false ; //按下空格键时就是1,否则为0}
}相关文章:
【Unity每日一记】WheelColider组件汽车游戏的关键
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:uni…...
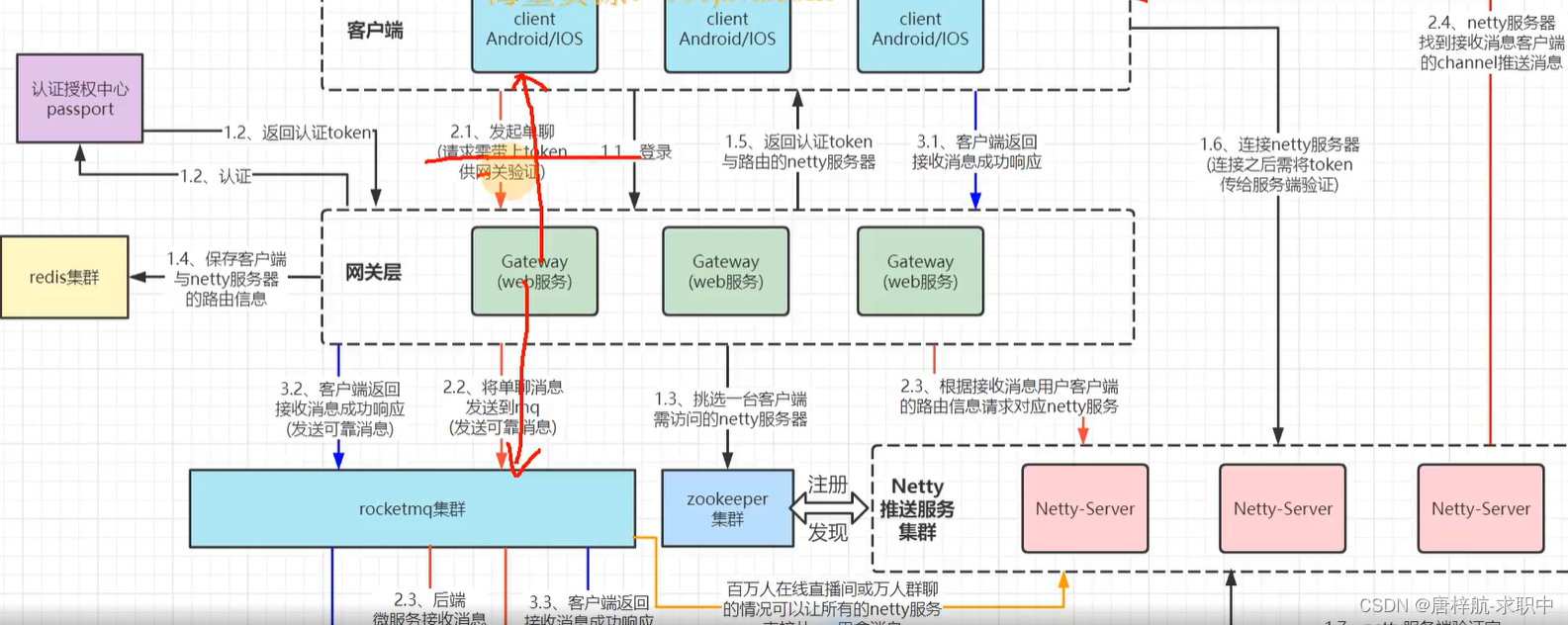
项目-IM
tim-server tim-server启动类实现CommandLineRunner接口,重写run()方法 run()方法开启一个线程,创建zk持久父节点,创建临时顺序子节点,将netty-server信息写入 1.1 用户登录 1.2 gateway向认证授权中心请求token 1.3 从zookee…...

2023年口腔医疗行业研究报告
第一章 行业概况 1.1 定义 口腔医疗行业是以口腔医疗服务消费为基础,包含医疗及消费双重属性,是 为满足口腔及颌面部疾病的预防和诊疗、口腔美容等需求提供相关医疗服务的行业。 该行业的主要参与者包括口腔保健专业人员(如牙医、口腔外科…...
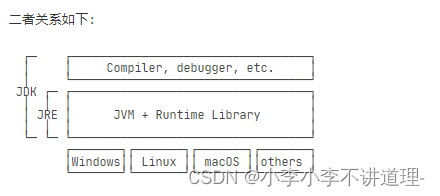
1Java:JDK是什么
1Java是介于编译型语言和解释型语言之间 编译型语言:c c先编译成机器码,再执行 解释型语言:pytn 解释器直接加载源码运行,但是运行效果低 Java是将代码编译成一张字节码,优点 针对不同平台编写虚拟机,不同平台的虚拟…...
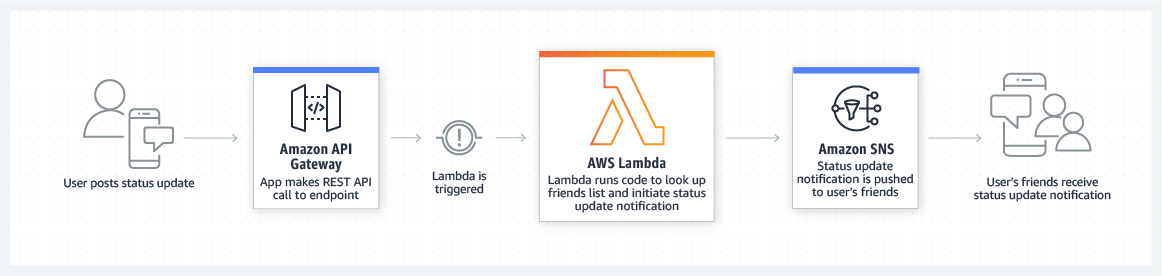
使用 Amazon Lambda 进行无服务器计算:云架构中的一场革命
引言 十年前,无服务器架构还像是痴人说梦。不再如此了! 有了 Amazon Lambda,我们现在可以建构和运行应用程序而不需要考虑服务器。云供应商会无缝地处理所有服务器的供应、扩展和管理。我们只需要关注代码。 这为云部署带来了前所未有的敏捷性、自动化和优化。但是,要发挥它的…...

谨慎使用Lombok的@Builder注解
现在很多程序员都习惯使用Lombok来使代码更加 “简洁”。但是使用Lombok也会造成很多问题,尤其Builder 有个很大的坑,已经见过好几次由于使用Builder注解导致默认值失效的问题,如果测试时没有在意这个问题,就很容易引发线上问题。…...

leetcode455. 分发饼干 【贪心】
题目: 假设你是一位很棒的家长,想要给你的孩子们一些小饼干。但是,每个孩子最多只能给一块饼干。 对每个孩子 i,都有一个胃口值 g[i],这是能让孩子们满足胃口的饼干的最小尺寸;并且每块饼干 j,…...
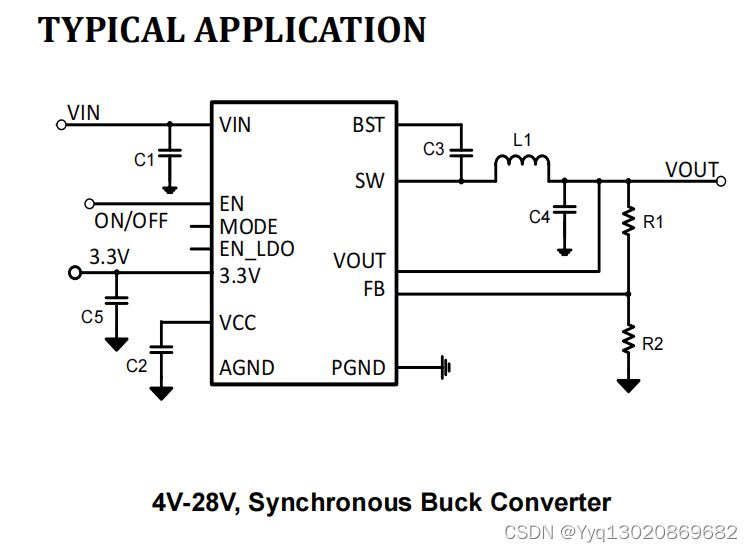
4V-28V Vin,6A同步降压DCDC变换器,集成3.3V和150mA LDO——SCT2361FPBR
SCT2361是一种高效率的同步降压型DC-DC变换器,集成3.3V和150mA LDO。输入电压范围为4V-28V,输出电压可调为0.6V,具有3mmx3mm的小QFN封装,可提供连续6A的输出电流。该器件将高、低压侧功率mosfet集成,使导通损耗降到最低…...

Linux中的scp指令
在Linux和Unix系统中,scp(Secure Copy Protocol)是一个用于通过SSH协议进行安全文件传输的命令行实用程序。与传统的cp(copy)命令不同,scp允许用户在不同的机器之间、或同一台机器的不同位置之间传输文件或…...

剑指 Offer 11. 旋转数组的最小数字
剑指 Offer 11. 旋转数组的最小数字 二分 要注意的是,由于存在重复数字,所以初始状态可能不满足二分的性质。不满足的情况是:左边开始的数字和右边结束的数字相等,所以一开始要缩小右边界,让右边界的数字小于第一个数…...

Redis面试题总结
1.什么是Redis Redis 是一种基于内存的数据库对数据的读写操作都是在内存中完成,因此读写速度非常快,常用于缓存,消息队列、分布式锁等场景。 Redis 提供了多种数据类型来支持不同的业务场景,比如 String(字符串)、Hash(哈希)、…...
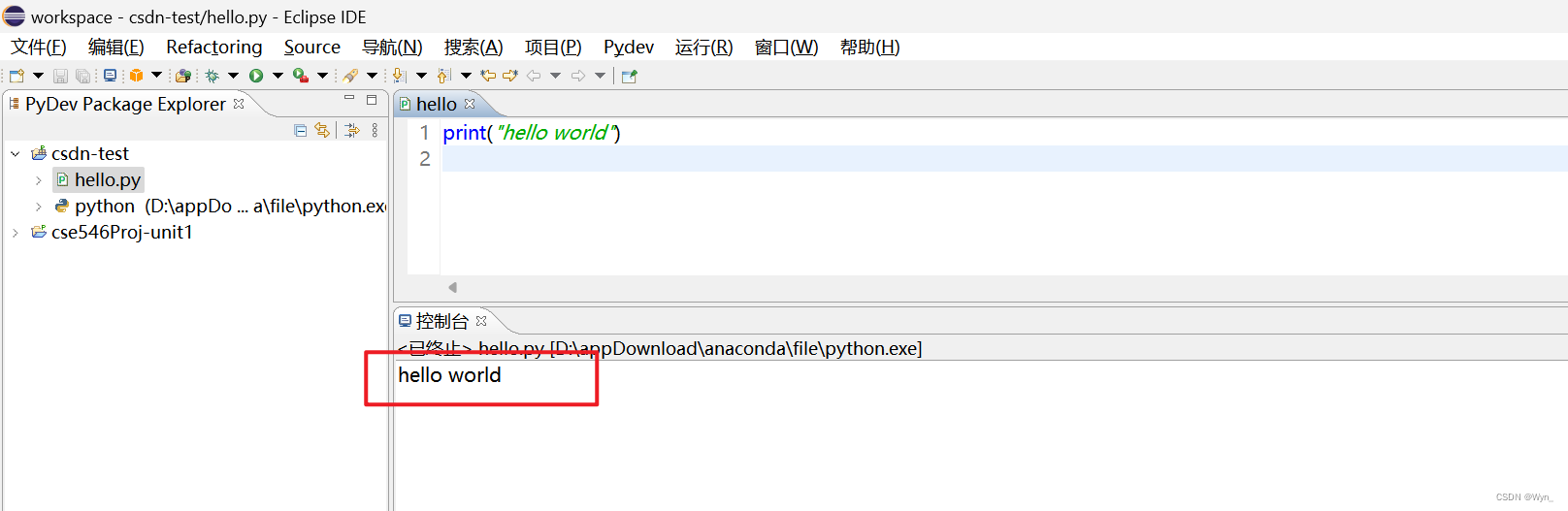
【Eclipse】搭建python环境;运行第一个python程序helloword
目录 0.环境 1.需准备&搭建思路 2.搭建具体步骤 1)查看是否安装过python 2)安装eclipse 3)安装和配置pyDev 3.创建第一个python程序具体步骤 1)新建项目 2)输入项目名字,和配置选项 3&#x…...

OpenAI 发布企业版ChatGPT-4
OpenAI 发布企业版ChatGPT-4 ChatGPT Enterprise 版本功能ChatGPT Enterprise 对比ChatGPT Enterprise 不同点未来发布计划OpenAI 发布企业版ChatGPT-4 OpenAI 宣布,鉴于ChatGPT的爆炸性成果,推出了针对企业的 ChatGPT Enterprise 版 ChatGPT Enterprise 版本功能 包含所有…...
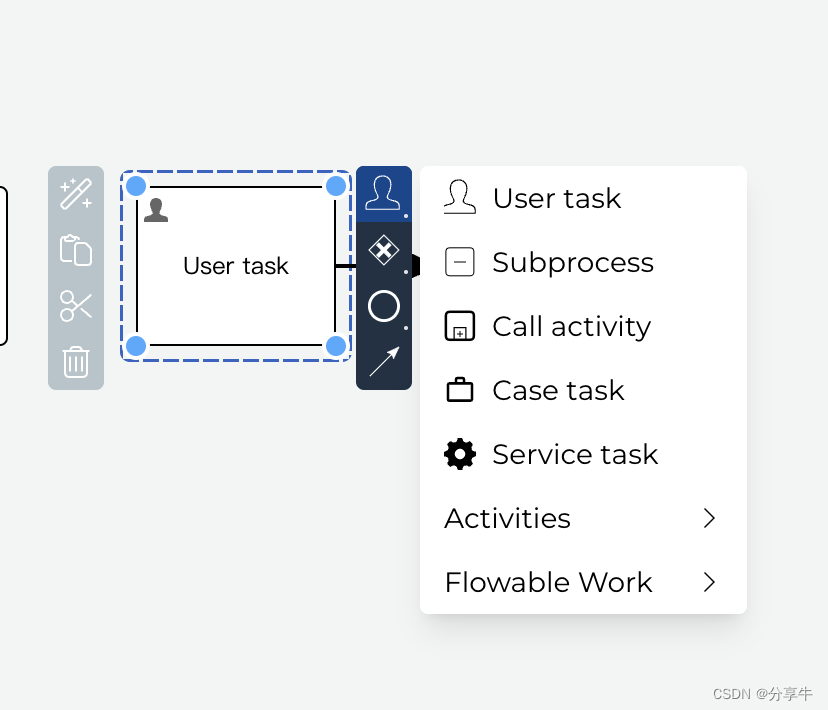
Flowable7 设计器
1、flowable7 已经在主版本上移除了Flowable UI相关的包,包含bpm-json相关的所有包和流程设计器相关前端文件。 2、flowable7 版本目前只保留了xml运行相关的包,ui modeler已经移除 3、目前官方给的回复是只能在 flowable 云产品上使用设计器ÿ…...
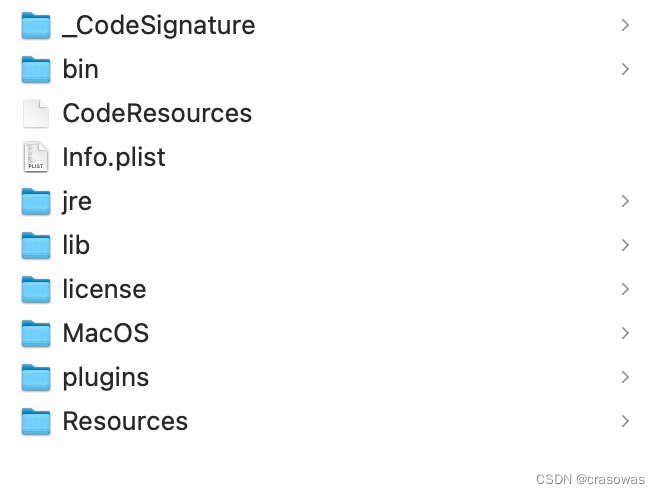
Flutter问题记录 - Unable to find bundled Java version
新版本的Android Studio真的移除了JRE,jre目录找不到,怪不得报错了,不过多了一个jbr目录,找了个以前的Android Studio版本对比 搜了一下jbr(JetBrains Runtime),原来IDEA老早就开始用了…...
Tomcat 日志乱码问题解决
我就是三井,一个永不放弃希望的男人。——《灌篮高手》 Tomcat 日志乱码问题解决 乱码原因:字符编码不一致 如:国内电脑一般都是GBK编码,而Tomcat日志使用的是UTF-8编码 解决方法:将对应字符编码由 UTF-8 改为 GBK 即…...

yum源以及rpm安装包配置、yum源冲突、yum-config-manager命令找不到、curl: (35)、docker镜像重复拉取失败
yum源配置并解决冲突、curl: (35)、docker镜像重复拉取失败、yum-config-manager命令找不到的解决方法 有的时候按照教程走,可能会设置yum源,设置后用yum下载东西很有可能或造成冲突 yum源冲突的解决方式无非有两种:1. 删除冲突软…...

ChatGPT和文心一言的优缺点比较
ChatGPT和文心一言都是自然语言生成技术的代表,下面是它们的优缺点比较: ChatGPT的优点: 自由度高:ChatGPT生成的文本与给定的话题没有紧密的关联,可以灵活地生成多种不同的文本。多样性高:ChatGPT可以生…...

⛳ 面试题-单例模式会存在线程安全问题吗?
🎍目录 ⛳ 面试题-单例模式会存在线程安全问题吗?🎨 一、单例模式-简介🚜 二、饿汉式🐾 三、懒汉式🎯 3.1、懒汉式:在调用 getInstance 的时候才创建对象。(线程不安全)&…...

C - 滑动窗口 /【模板】单调队列
Description 有一个长为 n 的序列 a,以及一个大小为 k 的窗口。现在这个从左边开始向右滑动,每次滑动一个单位,求出每次滑动后窗口中的最大值和最小值。 例如: The array is [1,3,−1,−3,5,3,6,7] and k3。 Input 输入一共有…...

SpinalHDL流水线设计:从时序抽象到工程实践
1. 项目概述:从Verilog的“线”到SpinalHDL的“流”在数字电路设计里,时序逻辑的流水线(Pipeline)是个老生常谈但又至关重要的概念。无论是为了提升系统主频,还是为了平衡组合逻辑路径的延迟,我们总免不了要…...

STM32 SysTick定时器深度配置:从原理到多场景实战应用
1. 项目概述:SysTick,一个被低估的“心脏起搏器”在STM32的世界里,SysTick定时器常常被开发者们视为一个“简单”的延时工具,或者仅仅是操作系统的心跳节拍器。但在我十多年的嵌入式开发生涯中,我越来越深刻地体会到&a…...
)
非标自动化设计实战:用亚德客气爪和真空吸盘搞定不规则工件抓取(附选型速查表)
非标自动化设计实战:亚德客气爪与真空吸盘在复杂工件抓取中的工程决策 在非标自动化设备设计领域,工件抓取方案的确定往往是项目成败的关键节点。面对形状不规则、材质特殊的工件——可能是表面粗糙的铸件、易碎的玻璃制品或是带有曲面的复合材料——工程…...

iTorrent完整指南:如何在iPhone上实现专业级种子下载管理
iTorrent完整指南:如何在iPhone上实现专业级种子下载管理 【免费下载链接】iTorrent Torrent client for iOS 16 项目地址: https://gitcode.com/gh_mirrors/it/iTorrent iTorrent是一款专为iOS 16设备设计的专业种子客户端应用,让你能够在iPhone…...

终极指南:为VSCode换上节日主题图标,圣诞节、万圣节等季节性装饰一键搞定
终极指南:为VSCode换上节日主题图标,圣诞节、万圣节等季节性装饰一键搞定 【免费下载链接】vscode-icons Custom Visual Studio Code Icons 项目地址: https://gitcode.com/gh_mirrors/vsc/vscode-icons vscode-icons是一款为Visual Studio Code提…...

华为MetaERP在全球化部署方面具有以下显著优势
华为MetaERP在全球化部署方面具有以下显著优势:1. 全栈自主技术,无“卡脖子”风险根技术自主可控:MetaERP基于华为自主研发的欧拉操作系统、高斯数据库、昇腾AI算力等全栈技术栈,完全摆脱对西方ERP系统的依赖,满足全球…...

忙碌”幻觉:你以为在推进项目,其实只是在逃避
时序收敛没过、功耗超了、验证卡住了——每一个问题都是真实的,每一项任务都是紧迫的。但有时候停下来想想,这些忙碌背后,到底有多少是真正在解决问题,有多少只是在用”我还在干活”这件事本身,来麻醉自己?…...

层次聚类实战:从距离选择到树形切割的业务可解释路径
1. 这不是“调个sklearn就能跑”的聚类——为什么 hierarchical clustering 值得你花两小时真正搞懂Hierarchical clustering(层次聚类)这个词,听起来像教科书里一个安静的章节,不如 K-means 那样高频出现在面试题里,也…...

C#从零开始学习笔记---第八天
大家好,欢迎来到我的频道,这里给大家先道个歉,这两天脚崴了,极度不适,所以昨天就没更新,今天的话确实也还挺不舒服的,所以今天我们的内容也不会有很多,希望大家谅解一下。那么接下来…...

AssetStudio深度解析:Unity资源提取原理与跨版本兼容实践
1. 这不是个“点开即用”的工具,而是一把需要校准的Unity资源解剖刀AssetStudio这个名字听起来像某个轻量级小工具,但实际用过的人很快会意识到:它根本不是拿来就跑的“一键提取器”,而是一套需要你亲手调参、理解Unity底层序列化…...