YOLOv5算法改进(12)— 替换主干网络之Swin Transformer

前言:Hello大家好,我是小哥谈。Swin Transformer是一种基于Transformer的深度学习模型,它在视觉任务中表现出色。与之前的Vision Transformer(ViT)不同,Swin Transformer具有高效和精确的特性,并被广泛用作当今许多视觉模型架构的主干。Swin Transformer采用了分层特征图和移动窗口MSA的方法,解决了原始ViT所面临的问题。它已经成为广泛应用于图像分类和对象检测等各种视觉任务的主要架构之一。🌈
 前期回顾:
前期回顾:
YOLOv5算法改进(1)— 如何去改进YOLOv5算法
YOLOv5算法改进(2)— 添加SE注意力机制
YOLOv5算法改进(3)— 添加CBAM注意力机制
YOLOv5算法改进(4)— 添加CA注意力机制
YOLOv5算法改进(5)— 添加ECA注意力机制
YOLOv5算法改进(6)— 添加SOCA注意力机制
YOLOv5算法改进(7)— 添加SimAM注意力机制
YOLOv5算法改进(8)— 替换主干网络之MobileNetV3
YOLOv5算法改进(9)— 替换主干网络之ShuffleNetV2
YOLOv5算法改进(10)— 替换主干网络之GhostNet
YOLOv5算法改进(11)— 替换主干网络之EfficientNetv2
目录
🚀1.论文
🚀2.Swin Transformer网络架构及原理
🚀3.YOLOv5结合swin Transformer
💥💥步骤1:在common.py中添加swin Transformer模块
💥💥步骤2:在yolo.py文件中加入类名
💥💥步骤3:创建自定义yaml文件
💥💥步骤4:验证是否加入成功
💥💥步骤5:修改train.py中的'--cfg'默认参数

🚀1.论文
Swin Transformer是2021年微软研究院发表在ICCV上的一篇文章,并且已经获得ICCV 2021 best paper的荣誉称号。Swin Transformer网络是Transformer模型在视觉领域的又一次碰撞,该论文一经发表就已在多项视觉任务中霸榜。Swim Transformer是特为视觉领域设计的一种分层Transformer结构,其两大特性是滑动窗口和分层表示。滑动窗口在局部不重叠的窗口中计算自注意力,并允许跨窗口连接,分层结构允许模型适配不同尺度的图片,并且计算复杂度与图像大小呈线性关系,也因此被人成为披着Transformer皮的CNN。🍃
Swin Transformer借鉴了CNN的分层结构,可以用于图像分类、图像分割、目标检测等一系列视觉任务。它以VIT作为起点,设计思想吸取了resnet的精华,从局部到全局,将Transformer设计成逐步扩大感受野的工具,它的成功背后绝不是偶然,而是厚厚的积累与沉淀。🍃
Swin Transformer是一种基于Transformer架构的视觉注意力模型,它在图像处理任务中取得了很好的效果。Swin Transformer的核心思想是通过分解图像特征图为不同的小块,并在这些小块上进行局部的注意力计算,然后再通过全局的注意力机制来整合不同小块的信息。🍃
Swin Transformer的整体结构可以分为四个主要部分:Patch Embedding、Stage、Transformer Encoder和Head。
🍀(1)Patch Embedding:将输入的图像分割为多个固定大小的图像块,然后使用一个线性投影层将每个图像块映射到一个固定维度的向量表示。
🍀(2)Stage:Swin Transformer采用了多个Stage的结构,每个Stage由若干个基本块(Basic Block)组成。每个基本块由一个局部注意力层(Local Window Attention)和一个全局注意力层(Global Attention)组成。局部注意力层用于对每个图像块内的特征进行局部关联计算,而全局注意力层则用于整合不同图像块之间的信息。
🍀(3)Transformer Encoder:每个Stage中的基本块都是Transformer Encoder结构,由多个层叠的Transformer Block组成。每个Transformer Block由一个多头自注意力层(Multi-Head Self-Attention)和一个前馈神经网络(Feed-Forward Network)组成。
🍀(4)Head:最后一个Stage后接一个输出层,用于将Transformer Encoder的输出特征映射到最终的预测结果。具体的输出层结构会根据任务的不同而变化,比如分类任务可以使用一个全连接层,目标检测任务可以使用一个卷积层。
总体来说,Swin Transformer通过局部和全局的注意力机制,实现了对图像特征的全局建模和局部关联计算,从而在视觉任务中取得了较好的性能。🌴
论文题目:《Swin Transformer: Hierarchical Vision Transformer using Shifted Windows》
论文地址: https://arxiv.org/pdf/2103.14030.pdf
代码实现: mirrors / microsoft / Swin-Transformer · GitCode
🚀2.Swin Transformer网络架构及原理
在开始改进之前,先来简单对比下 Swin Transformer 和之前的 Vision Transformer。🌱
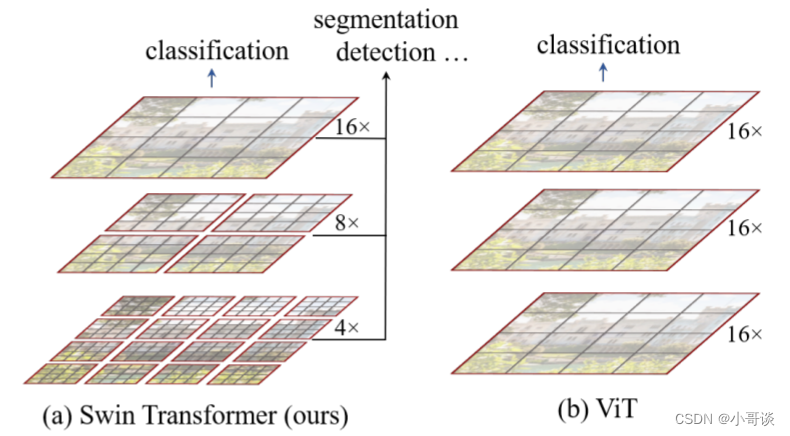
下图是Swin Transformer文章中给出的图,左边是本文要讲的Swin Transformer,右边是的Vision Transformer。通过对比至少可以看出两点不同:👇
🍀(1)Swin Transformer使用了类似卷积神经网络中的层次化构建方法(Hierarchical feature maps),比如特征图尺寸中有对图像下采样4倍的、8倍的以及16倍的,这样的backbone有助于在此基础上构建目标检测、实例分割等任务。而在之前的Vision Transformer中是一开始就直接下采样16倍,后面的特征图也是维持这个下采样率不变。
🍀(2)在Swin Transformer中使用了Windows Multi-Head Self-Attention(W-MSA)的概念,比如在下图的4倍下采样和8倍下采样中,将特征图划分成了多个不相交的区域(Window),并且Multi-Head Self-Attention只在每个窗口(Window)内进行。相对于Vision Transformer中直接对整个(Global)特征图进行Multi-Head Self-Attention,这样做的目的是能够减少计算量的,尤其是在浅层特征图很大的时候。这样做虽然减少了计算量但也会隔绝不同窗口之间的信息传递,所以在论文中作者又提出了 Shifted Windows Multi-Head Self-Attention(SW-MSA)的概念,通过此方法能够让信息在相邻的窗口中进行传递。
接下来,简单看下原论文中给出的关于Swin Transformer(Swin-T)网络的架构图。通过图(a)可以看出整个框架的基本流程如下:👇

🍀(1)首先将图片输入到Patch Partition模块中进行分块,即每4x4相邻的像素为一个Patch,然后在channel方向展平(flatten)。假设输入的是RGB三通道图片,那么每个patch就有4x4=16个像素,然后每个像素有R、G、B三个值,所以展平后是16x3=48,通过Patch Partition后图像shape由 [H, W, 3]变成了 [H/4, W/4, 48]。再然后在通过Linear Embeding层对每个像素的channel数据做线性变换,由48变成C,即图像shape再由 [H/4, W/4, 48]变成了 [H/4, W/4, C]。其实在源码中Patch Partition和Linear Embeding就是直接通过一个卷积层实现的,和之前Vision Transformer中讲的 Embedding层结构一模一样。
🍀(2)接着就是通过四个Stage构建不同大小的特征图,除了Stage1中先通过一个Linear Embeding层外,剩下三个stage都是先通过一个Patch Merging层进行下采样。然后都是重复堆叠Swin Transformer Block,注意这里的Block其实有两种结构,如图(b)中所示,这两种结构的不同之处仅在于一个使用了W-MSA结构,一个使用了SW-MSA结构,而且这两个结构是成对使用的,先使用一个W-MSA结构再使用一个SW-MSA结构。所以你会发现堆叠Swin Transformer Block的次数都是偶数(因为成对使用)。
🍀(3)最后对于分类网络,后面还会接上一个Layer Norm层、全局池化层以及全连接层得到最终输出。图中没有画,但源码中是这样做的。
优点:
- 提出了一种层级式网络结构,解决视觉图像的多尺度问题,提供各个尺度的维度信息;
- 提出Shifted Windows移动窗口,带来了更大的效率,移动操作让相邻窗口得到交互,极大降低了Transformer的计算复杂度;
- 计算复杂度是线性增长而不是平方式增长,可以广泛应用到所有计算机视觉领域;
效果:
- 在ImageNet上并非SOTA,仅与EfficientNet的性能差不多;
- swin Transformer的优点不是在于分类,在分类上的提升不是太多,而在检测、分割等下游任务中,有巨大的提升;
🚀3.YOLOv5结合swin Transformer
💥💥步骤1:在common.py中添加swin Transformer模块
将下面swin Transformer模块的代码复制粘贴到common.py文件的末尾。
""" Swin Transformer
A PyTorch impl of : `Swin Transformer: Hierarchical Vision Transformer using Shifted Windows`- https://arxiv.org/pdf/2103.14030Code/weights from https://github.com/microsoft/Swin-Transformer"""import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.checkpoint as checkpoint
import numpy as np
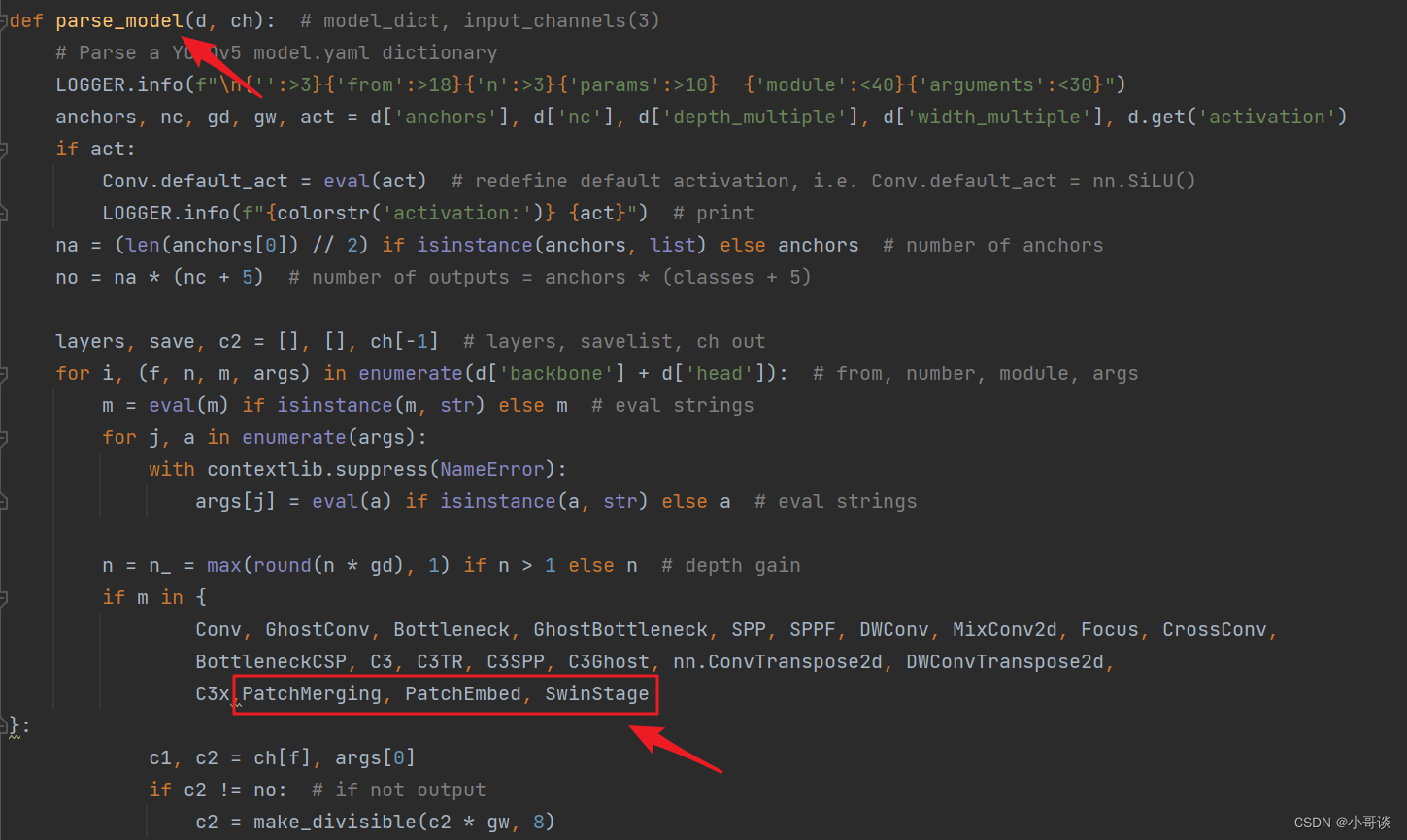
from typing import Optionaldef drop_path_f(x, drop_prob: float = 0., training: bool = False):"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).This is the same as the DropConnect impl I created for EfficientNet, etc networks, however,the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper...See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... I've opted forchanging the layer and argument names to 'drop path' rather than mix DropConnect as a layer name and use'survival rate' as the argument."""if drop_prob == 0. or not training:return xkeep_prob = 1 - drop_probshape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNetsrandom_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)random_tensor.floor_() # binarizeoutput = x.div(keep_prob) * random_tensorreturn outputclass DropPath(nn.Module):"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks)."""def __init__(self, drop_prob=None):super(DropPath, self).__init__()self.drop_prob = drop_probdef forward(self, x):return drop_path_f(x, self.drop_prob, self.training)def window_partition(x, window_size: int):"""将feature map按照window_size划分成一个个没有重叠的windowArgs:x: (B, H, W, C)window_size (int): window size(M)Returns:windows: (num_windows*B, window_size, window_size, C)"""B, H, W, C = x.shapex = x.view(B, H // window_size, window_size, W // window_size, window_size, C)# permute: [B, H//Mh, Mh, W//Mw, Mw, C] -> [B, H//Mh, W//Mh, Mw, Mw, C]# view: [B, H//Mh, W//Mw, Mh, Mw, C] -> [B*num_windows, Mh, Mw, C]windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)return windowsdef window_reverse(windows, window_size: int, H: int, W: int):"""将一个个window还原成一个feature mapArgs:windows: (num_windows*B, window_size, window_size, C)window_size (int): Window size(M)H (int): Height of imageW (int): Width of imageReturns:x: (B, H, W, C)"""B = int(windows.shape[0] / (H * W / window_size / window_size))# view: [B*num_windows, Mh, Mw, C] -> [B, H//Mh, W//Mw, Mh, Mw, C]x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)# permute: [B, H//Mh, W//Mw, Mh, Mw, C] -> [B, H//Mh, Mh, W//Mw, Mw, C]# view: [B, H//Mh, Mh, W//Mw, Mw, C] -> [B, H, W, C]x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)return xclass Mlp(nn.Module):""" MLP as used in Vision Transformer, MLP-Mixer and related networks"""def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):super().__init__()out_features = out_features or in_featureshidden_features = hidden_features or in_featuresself.fc1 = nn.Linear(in_features, hidden_features)self.act = act_layer()self.drop1 = nn.Dropout(drop)self.fc2 = nn.Linear(hidden_features, out_features)self.drop2 = nn.Dropout(drop)def forward(self, x):x = self.fc1(x)x = self.act(x)x = self.drop1(x)x = self.fc2(x)x = self.drop2(x)return xclass WindowAttention(nn.Module):r""" Window based multi-head self attention (W-MSA) module with relative position bias.It supports both of shifted and non-shifted window.Args:dim (int): Number of input channels.window_size (tuple[int]): The height and width of the window.num_heads (int): Number of attention heads.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueattn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0proj_drop (float, optional): Dropout ratio of output. Default: 0.0"""def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.):super().__init__()self.dim = dimself.window_size = window_size # [Mh, Mw]self.num_heads = num_headshead_dim = dim // num_headsself.scale = head_dim ** -0.5# define a parameter table of relative position biasself.relative_position_bias_table = nn.Parameter(torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # [2*Mh-1 * 2*Mw-1, nH]# get pair-wise relative position index for each token inside the windowcoords_h = torch.arange(self.window_size[0])coords_w = torch.arange(self.window_size[1])coords = torch.stack(torch.meshgrid([coords_h, coords_w], indexing="ij")) # [2, Mh, Mw]coords_flatten = torch.flatten(coords, 1) # [2, Mh*Mw]# [2, Mh*Mw, 1] - [2, 1, Mh*Mw]relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # [2, Mh*Mw, Mh*Mw]relative_coords = relative_coords.permute(1, 2, 0).contiguous() # [Mh*Mw, Mh*Mw, 2]relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0relative_coords[:, :, 1] += self.window_size[1] - 1relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1relative_position_index = relative_coords.sum(-1) # [Mh*Mw, Mh*Mw]self.register_buffer("relative_position_index", relative_position_index)self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.attn_drop = nn.Dropout(attn_drop)self.proj = nn.Linear(dim, dim)self.proj_drop = nn.Dropout(proj_drop)nn.init.trunc_normal_(self.relative_position_bias_table, std=.02)self.softmax = nn.Softmax(dim=-1)def forward(self, x, mask: Optional[torch.Tensor] = None):"""Args:x: input features with shape of (num_windows*B, Mh*Mw, C)mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None"""# [batch_size*num_windows, Mh*Mw, total_embed_dim]B_, N, C = x.shape# qkv(): -> [batch_size*num_windows, Mh*Mw, 3 * total_embed_dim]# reshape: -> [batch_size*num_windows, Mh*Mw, 3, num_heads, embed_dim_per_head]# permute: -> [3, batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4).contiguous()# [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]q, k, v = qkv.unbind(0) # make torchscript happy (cannot use tensor as tuple)# transpose: -> [batch_size*num_windows, num_heads, embed_dim_per_head, Mh*Mw]# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, Mh*Mw]q = q * self.scaleattn = (q @ k.transpose(-2, -1))# relative_position_bias_table.view: [Mh*Mw*Mh*Mw,nH] -> [Mh*Mw,Mh*Mw,nH]relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1)relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # [nH, Mh*Mw, Mh*Mw]attn = attn + relative_position_bias.unsqueeze(0)if mask is not None:# mask: [nW, Mh*Mw, Mh*Mw]nW = mask.shape[0] # num_windows# attn.view: [batch_size, num_windows, num_heads, Mh*Mw, Mh*Mw]# mask.unsqueeze: [1, nW, 1, Mh*Mw, Mh*Mw]attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)attn = attn.view(-1, self.num_heads, N, N)attn = self.softmax(attn)else:attn = self.softmax(attn)attn = self.attn_drop(attn)# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]# transpose: -> [batch_size*num_windows, Mh*Mw, num_heads, embed_dim_per_head]# reshape: -> [batch_size*num_windows, Mh*Mw, total_embed_dim]#x = (attn @ v).transpose(1, 2).reshape(B_, N, C)x = (attn.to(v.dtype) @ v).transpose(1, 2).reshape(B_, N, C)x = self.proj(x)x = self.proj_drop(x)return xclass SwinTransformerBlock(nn.Module):r""" Swin Transformer Block.Args:dim (int): Number of input channels.num_heads (int): Number of attention heads.window_size (int): Window size.shift_size (int): Shift size for SW-MSA.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Truedrop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float, optional): Stochastic depth rate. Default: 0.0act_layer (nn.Module, optional): Activation layer. Default: nn.GELUnorm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, dim, num_heads, window_size=7, shift_size=0,mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,act_layer=nn.GELU, norm_layer=nn.LayerNorm):super().__init__()self.dim = dimself.num_heads = num_headsself.window_size = window_sizeself.shift_size = shift_sizeself.mlp_ratio = mlp_ratioassert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"self.norm1 = norm_layer(dim)self.attn = WindowAttention(dim, window_size=(self.window_size, self.window_size), num_heads=num_heads, qkv_bias=qkv_bias,attn_drop=attn_drop, proj_drop=drop)self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)def forward(self, x, attn_mask):H, W = self.H, self.WB, L, C = x.shapeassert L == H * W, "input feature has wrong size"shortcut = xx = self.norm1(x)x = x.view(B, H, W, C)# pad feature maps to multiples of window size# 把 feature map 给 pad 到 window size 的整数倍pad_l = pad_t = 0pad_r = (self.window_size - W % self.window_size) % self.window_sizepad_b = (self.window_size - H % self.window_size) % self.window_sizex = F.pad(x, (0, 0, pad_l, pad_r, pad_t, pad_b))_, Hp, Wp, _ = x.shape# cyclic shiftif self.shift_size > 0:shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))else:shifted_x = xattn_mask = None# partition windowsx_windows = window_partition(shifted_x, self.window_size) # [nW*B, Mh, Mw, C]x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # [nW*B, Mh*Mw, C]# W-MSA/SW-MSAattn_windows = self.attn(x_windows, mask=attn_mask) # [nW*B, Mh*Mw, C]# merge windowsattn_windows = attn_windows.view(-1, self.window_size, self.window_size, C) # [nW*B, Mh, Mw, C]shifted_x = window_reverse(attn_windows, self.window_size, Hp, Wp) # [B, H', W', C]# reverse cyclic shiftif self.shift_size > 0:x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))else:x = shifted_xif pad_r > 0 or pad_b > 0:# 把前面pad的数据移除掉x = x[:, :H, :W, :].contiguous()x = x.view(B, H * W, C)# FFNx = shortcut + self.drop_path(x)x = x + self.drop_path(self.mlp(self.norm2(x)))return xclass SwinStage(nn.Module):"""A basic Swin Transformer layer for one stage.Args:dim (int): Number of input channels.depth (int): Number of blocks.num_heads (int): Number of attention heads.window_size (int): Local window size.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Truedrop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormdownsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: Noneuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False."""def __init__(self, dim, c2, depth, num_heads, window_size,mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0.,drop_path=0., norm_layer=nn.LayerNorm, use_checkpoint=False):super().__init__()assert dim == c2, r"no. in/out channel should be same"self.dim = dimself.depth = depthself.window_size = window_sizeself.use_checkpoint = use_checkpointself.shift_size = window_size // 2# build blocksself.blocks = nn.ModuleList([SwinTransformerBlock(dim=dim,num_heads=num_heads,window_size=window_size,shift_size=0 if (i % 2 == 0) else self.shift_size,mlp_ratio=mlp_ratio,qkv_bias=qkv_bias,drop=drop,attn_drop=attn_drop,drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,norm_layer=norm_layer)for i in range(depth)])def create_mask(self, x, H, W):# calculate attention mask for SW-MSA# 保证Hp和Wp是window_size的整数倍Hp = int(np.ceil(H / self.window_size)) * self.window_sizeWp = int(np.ceil(W / self.window_size)) * self.window_size# 拥有和feature map一样的通道排列顺序,方便后续window_partitionimg_mask = torch.zeros((1, Hp, Wp, 1), device=x.device) # [1, Hp, Wp, 1]h_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))w_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))cnt = 0for h in h_slices:for w in w_slices:img_mask[:, h, w, :] = cntcnt += 1mask_windows = window_partition(img_mask, self.window_size) # [nW, Mh, Mw, 1]mask_windows = mask_windows.view(-1, self.window_size * self.window_size) # [nW, Mh*Mw]attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) # [nW, 1, Mh*Mw] - [nW, Mh*Mw, 1]# [nW, Mh*Mw, Mh*Mw]attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))return attn_maskdef forward(self, x):B, C, H, W = x.shapex = x.permute(0, 2, 3, 1).contiguous().view(B, H * W, C)attn_mask = self.create_mask(x, H, W) # [nW, Mh*Mw, Mh*Mw]for blk in self.blocks:blk.H, blk.W = H, Wif not torch.jit.is_scripting() and self.use_checkpoint:x = checkpoint.checkpoint(blk, x, attn_mask)else:x = blk(x, attn_mask)x = x.view(B, H, W, C)x = x.permute(0, 3, 1, 2).contiguous()return xclass PatchEmbed(nn.Module):"""2D Image to Patch Embedding"""def __init__(self, in_c=3, embed_dim=96, patch_size=4, norm_layer=None):super().__init__()patch_size = (patch_size, patch_size)self.patch_size = patch_sizeself.in_chans = in_cself.embed_dim = embed_dimself.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()def forward(self, x):_, _, H, W = x.shape# padding# 如果输入图片的H,W不是patch_size的整数倍,需要进行paddingpad_input = (H % self.patch_size[0] != 0) or (W % self.patch_size[1] != 0)if pad_input:# to pad the last 3 dimensions,# (W_left, W_right, H_top,H_bottom, C_front, C_back)x = F.pad(x, (0, self.patch_size[1] - W % self.patch_size[1],0, self.patch_size[0] - H % self.patch_size[0],0, 0))# 下采样patch_size倍x = self.proj(x)B, C, H, W = x.shape# flatten: [B, C, H, W] -> [B, C, HW]# transpose: [B, C, HW] -> [B, HW, C]x = x.flatten(2).transpose(1, 2)x = self.norm(x)# view: [B, HW, C] -> [B, H, W, C]# permute: [B, H, W, C] -> [B, C, H, W]x = x.view(B, H, W, C)x = x.permute(0, 3, 1, 2).contiguous()return xclass PatchMerging(nn.Module):r""" Patch Merging Layer.Args:dim (int): Number of input channels.norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, dim, c2, norm_layer=nn.LayerNorm):super().__init__()assert c2 == (2 * dim), r"no. out channel should be 2 * no. in channel "self.dim = dimself.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)self.norm = norm_layer(4 * dim)def forward(self, x):"""x: B, C, H, W"""B, C, H, W = x.shape# assert L == H * W, "input feature has wrong size"x = x.permute(0, 2, 3, 1).contiguous()# x = x.view(B, H*W, C)# padding# 如果输入feature map的H,W不是2的整数倍,需要进行paddingpad_input = (H % 2 == 1) or (W % 2 == 1)if pad_input:# to pad the last 3 dimensions, starting from the last dimension and moving forward.# (C_front, C_back, W_left, W_right, H_top, H_bottom)# 注意这里的Tensor通道是[B, H, W, C],所以会和官方文档有些不同x = F.pad(x, (0, 0, 0, W % 2, 0, H % 2))x0 = x[:, 0::2, 0::2, :] # [B, H/2, W/2, C]x1 = x[:, 1::2, 0::2, :] # [B, H/2, W/2, C]x2 = x[:, 0::2, 1::2, :] # [B, H/2, W/2, C]x3 = x[:, 1::2, 1::2, :] # [B, H/2, W/2, C]x = torch.cat([x0, x1, x2, x3], -1) # [B, H/2, W/2, 4*C]x = x.view(B, -1, 4 * C) # [B, H/2*W/2, 4*C]x = self.norm(x)x = self.reduction(x) # [B, H/2*W/2, 2*C]x = x.view(B, int(H / 2), int(W / 2), C * 2)x = x.permute(0, 3, 1, 2).contiguous()return x💥💥步骤2:在yolo.py文件中加入类名
首先在yolo.py文件中找到parse_model函数这一行,加入PatchMerging、PatchEmbed 和 SwinStage这三个模块。
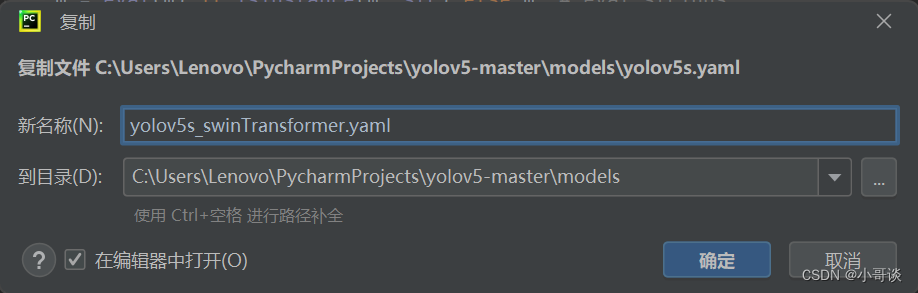
💥💥步骤3:创建自定义yaml文件
在models文件夹中复制yolov5s.yaml,粘贴并重命名为yolov5s_swinTransformer.yaml。
yolov5s_swinTransformer.yaml文件修改后的完整代码如下:
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters
nc: 80 # number of classesdepth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args]# input [b, 1, 640, 640][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2 [b, 64, 320, 320][-1, 1, Conv, [128, 3, 2]], # 1-P2/4 [b, 128, 160, 160][-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8 [b, 256, 80, 80][-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16 [b, 512, 40, 40][-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32 [b, 1024, 20, 20][-1, 3, C3, [1024]],[-1, 1, SwinStage, [1024, 2, 8, 4]], # [outputChannel, blockDepth, numHeaders, windowSize][-1, 1, SPPF, [1024, 5]], # 10]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 14[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 18 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 15], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 21 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 11], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 24 (P5/32-large)[[18, 21, 24], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
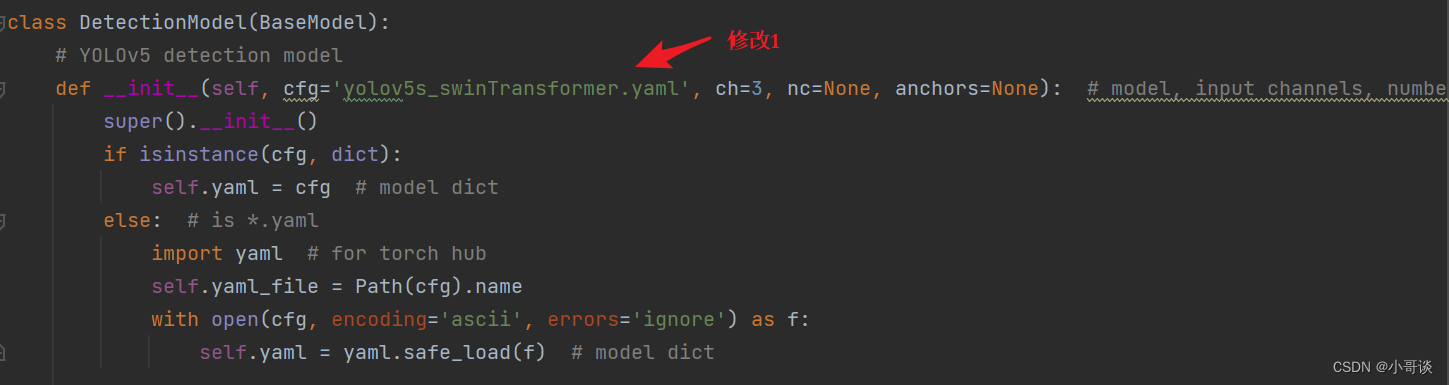
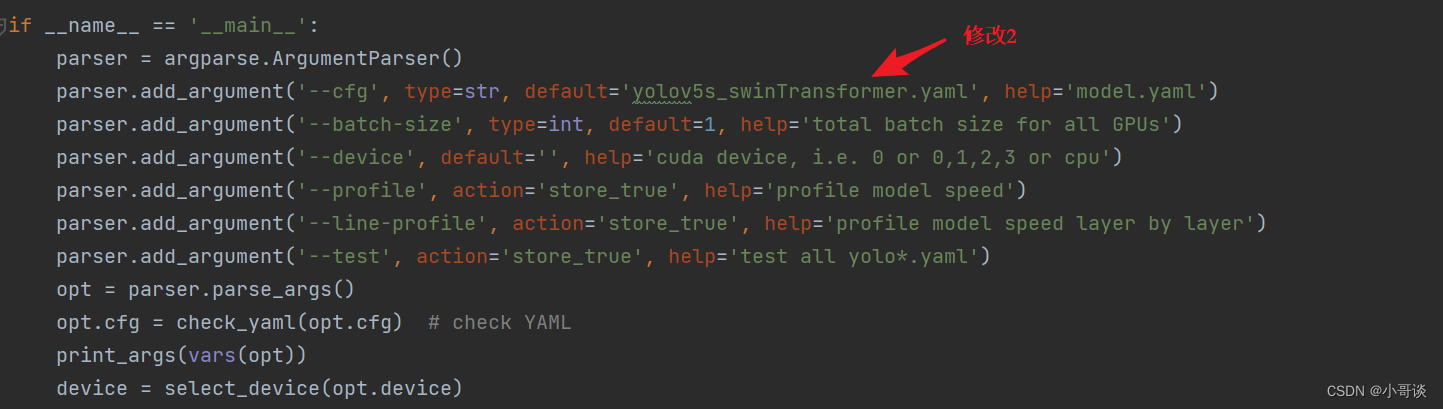
💥💥步骤4:验证是否加入成功
在yolo.py文件里,配置我们刚才自定义的yolov5s_swinTransformer.yaml。
然后运行yolo.py,得到结果。
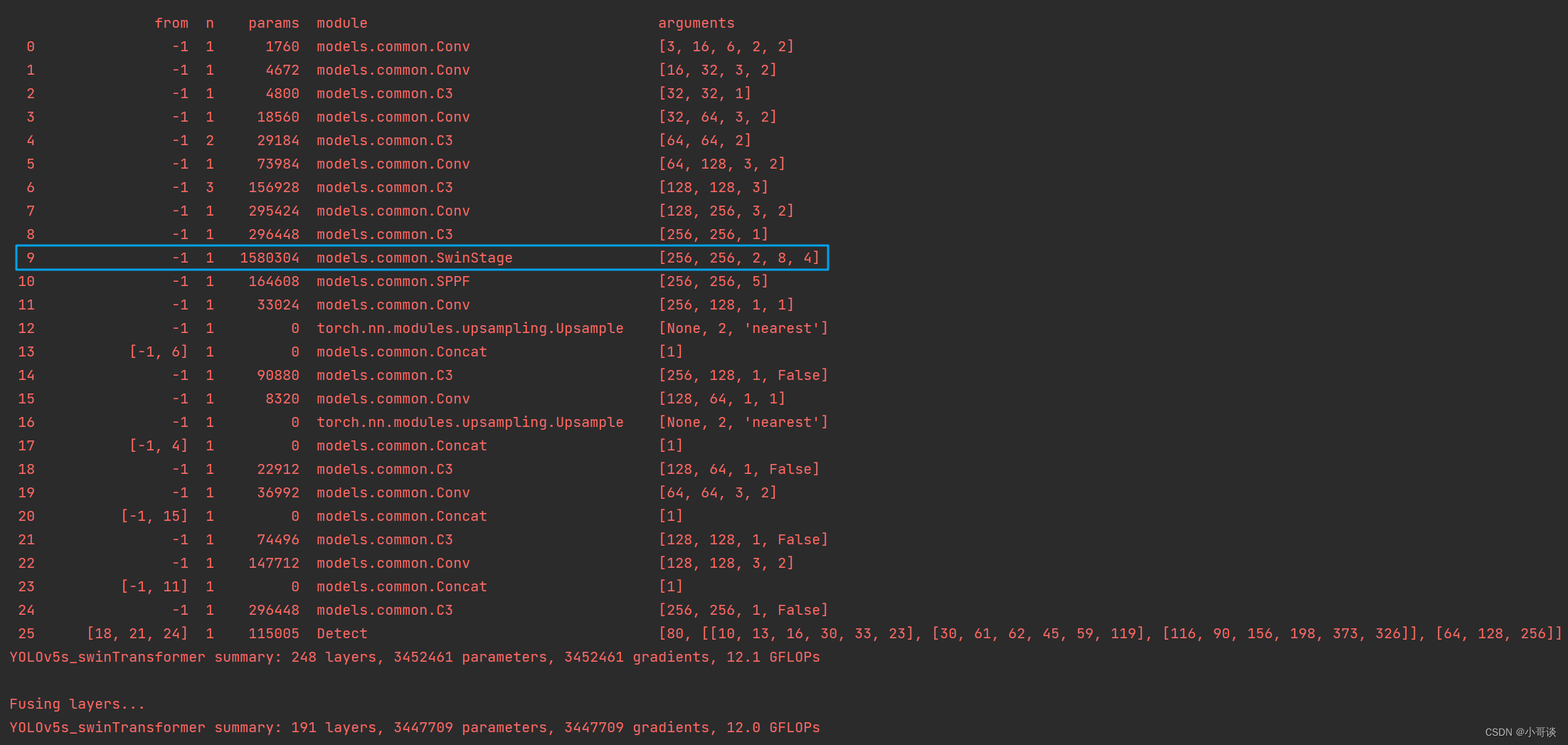
这样就算添加成功了。🎉🎉🎉
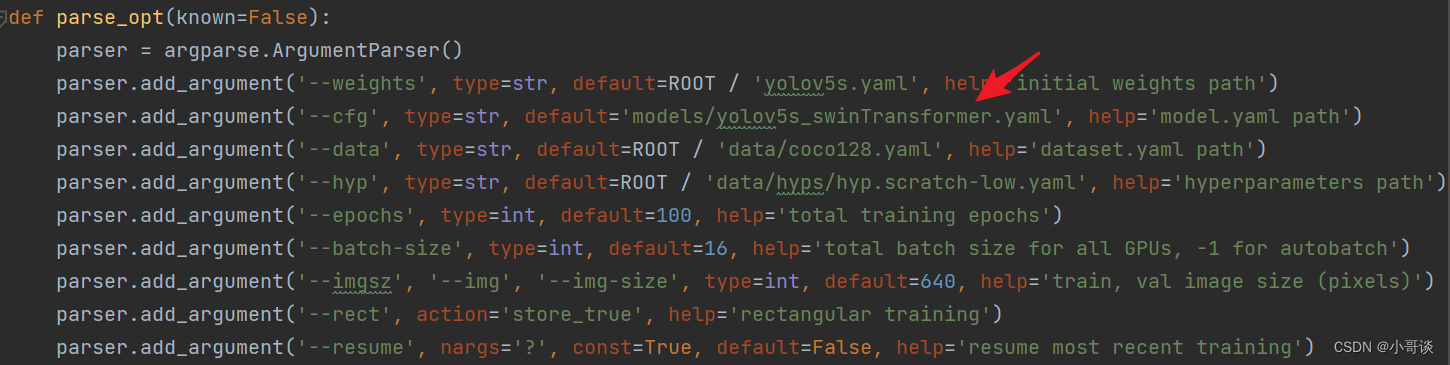
💥💥步骤5:修改train.py中的'--cfg'默认参数
在train.py文件中找到 parse_opt函数,然后将第二行 '--cfg' 的 default 改为 'models/yolov5s_swinTransformer.yaml',然后就可以开始进行训练了。🎈🎈🎈
相关文章:
YOLOv5算法改进(12)— 替换主干网络之Swin Transformer
前言:Hello大家好,我是小哥谈。Swin Transformer是一种基于Transformer的深度学习模型,它在视觉任务中表现出色。与之前的Vision Transformer(ViT)不同,Swin Transformer具有高效和精确的特性,并…...

php 权限节点的位运算
一,概述 在 PHP 中,位运算可以用来进行权限节点的判断。通常,每个权限节点都会用一个不同的位表示(2的n次方,从0开始),可以将这些位组合成一个权限值。然后,可以使用位运算符来检查…...
ClickHouse进阶(六):副本与分片-2-Distributed引擎
进入正文前,感谢宝子们订阅专题、点赞、评论、收藏!关注IT贫道,获取高质量博客内容! 🏡个人主页:含各种IT体系技术,IT贫道_Apache Doris,大数据OLAP体系技术栈,Kerberos安全认证-CSDN博客 📌订阅…...

Git和Github的基本用法
目录 背景 下载安装 安装 git for windows 安装 tortoise git 使用 Github 创建项目 注册账号 创建项目 下载项目到本地 Git 操作的三板斧 放入代码 三板斧第一招: git add 三板斧第二招: git commit 三板斧第三招: git push 小结 🎈个人主页…...

279. 完全平方数
279.完全平方数 给你一个整数 n ,返回 和为 n 的完全平方数的最少数量 。 完全平方数 是一个整数,其值等于另一个整数的平方;换句话说,其值等于一个整数自乘的积。例如,1、4、9 和 16 都是完全平方数,而 …...

一篇文章学会C#的正则表达式
https://blog.csdn.net/qq_38507850/article/details/79179128 正则表达式 一句话概括就是用来对字符串根据自己的规则进行匹配的,可以匹配(返回)出符合自己要求的匹配结果,有人说字符串类的函数也可以,确实是这样,但是字符串的函…...

智慧工地源码 智慧大屏、手机APP、SaaS模式
一、智慧工地可以通过安全八要素来提升安全保障,具体措施包括: 1.安全管理制度:建立科学完善的安全管理制度,包括安全标准规范、安全生产手册等,明确各项安全管理职责和要求。 2.安全培训教育:对工地人…...
C# WPF监听USB插入拨出
可以全部监听。好用 private void FormF100WriteCortexLicense_Load(object sender, EventArgs e){this.Text this.Text " " FT_Tools.Program.version;USB USBWatcher new USB();USBWatcher.AddUSBEventWatcher(USBEventHandler, USBEventHandler, new TimeSpa…...
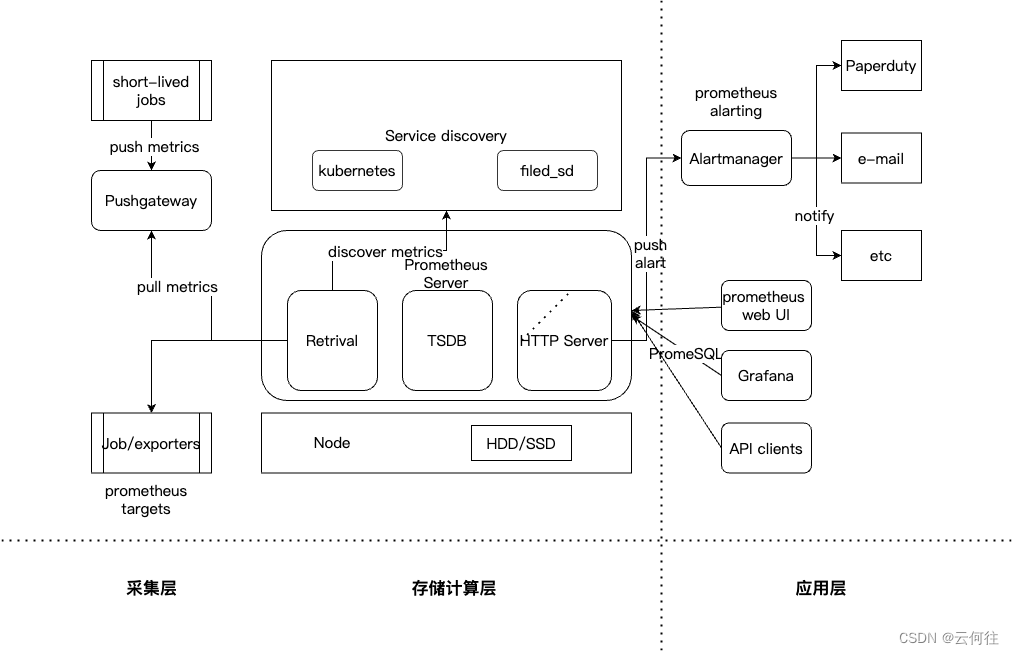
Prometheus监控(三)架构
文章目录 Prometheus架构图Prometheus生态圈组件Prometheus Serverclient librariesPushgatewayexporterAlartmanager Prometheus架构理解存储计算层采集层应用层 Prometheus架构图 Prometheus生态圈组件 Prometheus Server 主服务器,负责收集和存储时间序列数据 …...

linux kvm网桥br简单理解和持久化配置
linux网桥简单理解和持久化配置 文章目录 前言一、Linux 网桥是什么?二、网桥主要作用三、网桥配置命令及安装(CentOS系统) 1 网桥配置命令2.持久化网桥配置 前言 linux bridge是网络虚拟化中非常重要的一种设备,今天就来学习下linux bridge的相关知…...

【LeetCode-中等题】105. 从前序与中序遍历序列构造二叉树
文章目录 题目方法一:递归 题目 方法一:递归 preorder [3,9,20,15,7] inorder [9,3,15,20,7] 首先根据 preorder 找到根节点是 3然后根据根节点将 inorder 分成左子树和右子树 左子树 inorder [9]右子树 inorder [15,20,7]这时候3是根节点 3的左子树…...
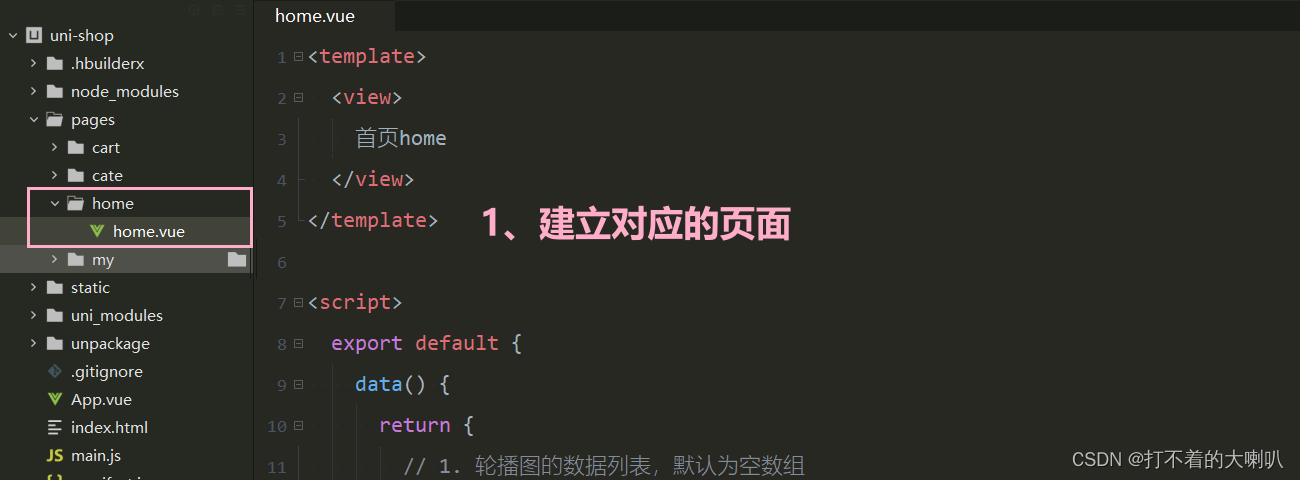
uniapp 配置网络请求并使用请求轮播图
由于平台的限制,小程序项目中不支持 axios,而且原生的 wx.request() API 功能较为简单,不支持拦截器等全局定制的功能。因此,建议在 uni-app 项目中使用 escook/request-miniprogram 第三方包发起网络数据请求。 官方文档…...
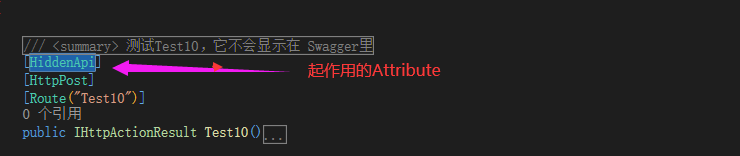
c#在MVC Api(.net framework)当中使用Swagger,以及Demo下载
主要的步骤就是创建项目,通过nuget 添加Swashbuckle包,然后在SwaggerConfig当中进行相关的配置。 具体的步骤,可以参考下面的链接: https://www.cnblogs.com/94pm/p/8046580.htmlhttps://blog.csdn.net/xiaouncle/article/detail…...
Linux 常见命令操作
一、目录管理 1.1 列出目录 ls # ls 命令 # -a 参数,查看全部的文件,包括隐藏的文件 # -l 参数,列出所有的文件,包括文件的属性和权限,不显示隐藏文件 [rootlocalhost /]# ls bin boot dev etc home lib lib64…...
前端实习第七周周记
前言 第六周没写,是因为第六周的前两天在处理第五周的样本库部分。问题解决一个是嵌套问题(因为我用到了递归),还有一个问题在于本机没有问题,打包上线接口404。这个问题我会在这周的总结中说。 第六周第三天才谈好新…...
DevOps理念:开发与运维的融合
在现代软件开发领域,DevOps 不仅仅是一个流行的词汇,更是一种文化、一种哲学和一种方法论。DevOps 的核心理念是通过开发和运维之间的紧密合作,实现快速交付、高质量和持续创新。本文将深入探讨 DevOps 文化的重要性、原则以及如何在团队中实…...
windows下Mysql安装配置教程
Mysql下载 在官网下载mysql community Server https://dev.mysql.com/downloads/mysql/ 可以选择下载压缩包或者MSI安装程序 使用压缩包安装 MySQL 压缩包安装通常需要以下步骤: 1. 下载 MySQL 安装包 你可以从 MySQL 官网上下载适合你系统的 MySQL 安装包&am…...

[开发|java] activeJdbc的model的isModified方法说明
在 ActiveJDBC 中,每个数据库表都对应一个继承自 org.javalite.activejdbc.Model 的类,该类用于表示数据库表中的记录。这些类允许您以面向对象的方式与数据库交互。 import org.javalite.activejdbc.Model;public class User extends Model {static {v…...
23062day6
作业:将dict.txt导入到数据库中。 方法1:创建shell脚本, 调用指令创建数据库和表格,使用循环在循环中用数组存储dict.txt的内容并插入表格中。 方法2:在终端创建数据库和表格,将dict.txt中的内容手动输入…...

MiniExcel
MiniExcel 是一个在 .NET 平台上用于操作 Excel 文件的库。它的特点是轻量级、简单易用,并且支持读取和写入 Excel 文件的功能。 使用 MiniExcel 可以进行以下操作: 读取 Excel 文件的数据,并将其转换为多维数组或实体对象。将多维数组或实…...

三分钟永久备份QQ空间:让青春记忆永不褪色的终极方案
三分钟永久备份QQ空间:让青春记忆永不褪色的终极方案 【免费下载链接】QZoneExport QQ空间导出助手,用于备份QQ空间的说说、日志、私密日记、相册、视频、留言板、QQ好友、收藏夹、分享、最近访客为文件,便于迁移与保存 项目地址: https://…...
)
别再手动拼图了!用Godot4的TileMap快速搭建2D游戏场景(附图层与相机跟随技巧)
别再手动拼图了!用Godot4的TileMap快速搭建2D游戏场景(附图层与相机跟随技巧) 在独立游戏开发中,场景搭建往往是耗时最长的环节之一。许多新手开发者习惯用Sprite节点逐个摆放场景元素,这不仅效率低下,后期…...
3分钟让Windows任务栏变透明:TranslucentTB完全指南
3分钟让Windows任务栏变透明:TranslucentTB完全指南 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 你是否厌倦了Windows系统…...

jquery.inputmask插件介绍
目录 一、什么是 jQuery.inputmask? 主要应用场景 二、快速上手 1. 引入依赖文件 2. 基础用法 3. 掩码字符定义 三、高级功能 1. 自定义占位符 2. 完成回调 3. 扩展自定义字符 4. 重复掩码 5. 移除默认占位符 四、配合 Vue.js 使用 五、更多实用示例 …...

虚幻5细节面板消失的真相与四步唤醒方案
1. 这不是Bug,是虚幻5蓝图编辑器的“细节面板隐身术”在作祟2025年用虚幻引擎5做项目,突然发现蓝图编辑器右侧的细节面板(Details Panel)怎么点都不出来——节点选中了没反应,右键菜单里找不到“显示细节”,…...

记录人生第一个Linux内核Patch被采纳的经历
最近运气不错,提交的一个关于 Linux 内核 SMMUv3 驱动的补丁(Patch)被采纳了。虽然只是一个边界条件的微调,但作为自己的第一个 Patch,过程还挺有意思的,中间也暴露出自己不少技术盲区。趁着记忆热乎&#…...
)
Win11系统下,Java开发环境配置保姆级教程(JDK 8u201安装+环境变量避坑指南)
Win11系统Java开发环境配置全攻略:从零开始避坑指南 刚接触Java编程的新手们,面对陌生的开发环境配置往往感到无从下手。特别是对于非计算机专业背景的学习者来说,那些晦涩的术语和复杂的系统设置就像一堵高墙,让人望而生畏。本文…...
)
Vue3项目里SignalR怎么用?一个聊天室Demo带你从配置到上线(.NET 6 + Vue 3)
Vue3与SignalR实战:构建高互动聊天室的全栈指南 引言 在当今追求实时交互体验的Web应用中,传统的HTTP请求-响应模式已无法满足即时通讯、实时通知等场景需求。SignalR作为ASP.NET Core生态中的实时通信库,通过自动选择最佳传输协议࿰…...
)
别再只算差异了!用Cytoscape给Hub Gene分析加个‘可视化Buff’(附脑网络实战图)
别再只算差异了!用Cytoscape给Hub Gene分析加个‘可视化Buff’(附脑网络实战图) 在生物信息学分析中,差异基因筛选往往是研究的第一步,但如何从海量差异基因中找出真正具有生物学意义的"关键调控者"…...

Go语言整洁架构:分层设计
Go语言整洁架构:分层设计 1. 分层结构 internal/domain/ # 领域实体usecase/ # 用例adapter/ # 适配器handler/ # HTTP处理2. 总结 整洁架构强调业务逻辑的独立性和依赖方向的正确性。...