CAN总线通信
CAN总线通信
CAN 是控制器局域网络(Controller Area Network) 的缩写,是 ISO 国际标准化的串行通信协议。
CAN是半双工通信
CAN总线特点
(1) 多主控制
在总线空闲时,所有的单元都可开始发送消息(多主控制)。
最先访问总线的单元可获得发送权(CSMA/CA 方式)。
多个单元同时开始发送时,发送高优先级 ID 消息的单元可获得发送权。
(2) 消息的发送
在 CAN 协议中,所有的消息都以固定的格式发送。总线空闲时,所有与总线相连的单元都可以开始发送新消息。两个以上的单元同时开始发送消息时,根据标识符(Identifier 以下称为 ID)决定优先级。ID 并不是表示发送的目的地址,而是表示访问总线的消息的优先级。两个以上的单元同时开始发送消息时,对各消息 ID 的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
(3) 系统的柔软性
与总线相连的单元没有类似于“地址”的信息。因此在总线上增加单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
(4) 通信速度
根据整个网络的规模,可设定适合的通信速度。
在同一网络中,所有单元必须设定成统一的通信速度。
即使有一个单元的通信速度与其它的不一样,此单元 也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
(5) 远程数据请求
可通过发送“遥控帧” 请求其他单元发送数据。
(6) 错误检测功能·错误通知功能·错误恢复功能
所有的单元都可以检测错误(错误检测功能)。
检测出错误的单元会立即同时通知其他所有单元(错误通知功能)。
正在发送消息的单元一旦检测出错误,会强制结束当前的发送。强制结束发送的单元会不断反复地重新发送此消息直到成功发送为止(错误恢复功能)。
(7) 故障封闭
CAN 可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
(8) 连接
CAN 总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
CAN总线电路
TJA1040T芯片负责将单片机的TTL逻辑电平转换为CAN总线的通讯电平,芯片的TXD引脚接到单片机的CAN_TX引脚,RXD引脚接到单片机的CAN_RX引脚,STB引脚可接单片机的一个普通IO口
TJA1040T芯片就是CAN收发器,单片机内部的CAN外设就是CAN控制器

CAN协议
CAN 协议涵盖了 ISO 规定的 OSI 基本参照模型中的传输层、数据链路层及物理层。也就是说CAN协议参照了网络中的七层参考模型,但只使用到了其中的传输层、数据链路层和物理层
这三层在CAN中具体的定于事项和功能如下图所示

数据链路层分为 MAC 子层和 LLC 子层,MAC 子层是 CAN 协议的核心部分。数据链路层的功能是将物理层收到的信号组织成有意义的消息,并提供传送错误控制等传输控制的流程。具体地说,就是消息的帧化、仲裁、 应答、错误的检测或报告。数据链路层的功能通常在 CAN 控制器的硬件中执行
CAN 协议经 ISO 标准化后有 ISO11898 标准和 ISO11519-2 标准两种。(ISO11519-2 是 ISO11519-1 追加新规约后的版本。)ISO11898 和 ISO11519-2 标准对于数据链路层的定义相同,但物理层不同

CAN总线电平
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。总线上执行逻辑上的线“与”关系,也就是说总线上所有设备都是隐性电平(1)的话,总线就呈空闲状态,只要有一个变为显性电平(0),总线就是处于数据传输过程。

因为CAN的标准有两个:ISO11898和ISO11519-2,两个标准的差分电平又不相同
常用的标准是ISO11898,该标准通信速度比较快
ISO11898标准
该标准的速度最大可达1M
逻辑1是隐性电平,CAN_High和CAN_Low都是2.5V,电位差为0V,
逻辑0是显性电平,CAN_Hight为3.5V,CAN_Low为1.5V,电位差是2V
CAN总线默认是隐性电平,两根线的电位差为0V

ISO11519-2标准
该标准的速度最大只有125kbps
逻辑1是隐性电平,CAN_High为1.5V左右,CAN_Low为3V左右,电位差为1.5V
逻辑0是显性电平,CAN_High为4V,CAN_Low为1V,电位差为3V
因为两根线的电压变化比较大,硬件需要的反应时间就长,所以该标准的通信速率较慢

ISO11898和ISO11519-2物理层的主要不同点如下图所示


帧种类
CAN通信是通过以下 5 种类型的帧进行的。

其中错误帧、过载帧和帧间隔用得比较少,编程时主要是数据帧和遥控帧,数据帧发送的是接收方的ID,遥控帧因为要要求别人发送信息过来,所以发送的是发送方的ID
数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下称 ID), 扩展格式有 29 个位的 ID。
数据帧
数据帧的构成主要由帧起始、仲裁段、控制段、数据段、CRC段、ACK段和帧结束组成

帧起始
表示帧开始的段。1 个位的显性位。
一开始总线上是隐性电平,为逻辑1,当电平由隐性变为显性,即由1变为0,则表示帧起始

仲裁段
表示数据的优先级的段。
标准格式和扩展格式在此的构成有所不同。
当ID号都一样时,RTR就是用来区分数据帧和遥控帧的,RTR为显性时就是数据帧,为隐性时就是遥控帧,数据帧的优先级是大于遥控帧的

优先级的决定
在总线空闲态,最先开始发送消息的单元获得发送权。
多个单元同时开始发送时,各发送单元从仲裁段的第一位开始进行仲裁。连续输出显性电平(逻辑0)最多的单元可继续发送
CAN总线在发送电平状态的时候,同时会检查总线上的电平,若电平不一致,则会做出一些改变
具体仲裁过程:单元1和单元2的帧起始和基本ID号都相同,进入仲裁段后,单元1在某一处出现了隐性电平(逻辑1),但此时单元2还是显性电平(逻辑0),因为显性电平的优先级比隐性电平的高,所以单元2就获得了总线仲裁权,可以继续发送数据,而单元1仲裁失利,转为接收状态

数据帧和遥控帧的优先级
具有相同 ID 的数据帧和遥控帧在总线上竞争时,仲裁段的最后一位(RTR)为显性位的数据帧具有优先权, 可继续发送。
因为数据帧和遥控帧的ID完全相同,因此根据RTR的电平状态来决定谁拥有优先权,而数据帧的RTR是显性电平(逻辑0),遥控帧的RTR是隐性电平(逻辑1),显性电平优先级大于隐性电平,所以数据帧具有优先权

标准格式和扩展格式的优先级
标准格式 ID 与具有相同 ID 的遥控帧或者扩展格式的数据帧在总线上竞争时,标准格式的 RTR 位为显性位的具有优先权,可继续发送。

控制段
控制段由 6 个位构成,表示数据段的字节数。标准格式和扩展格式的构成有所不同

DLC指示后面数据段的字节数,为BCD编码,编码格式如下图,例如数据段的字节数为5,则DLC为0101

CRC(标准和拓展相同)
CRC 段是检查帧传输错误的帧。由 15 个位的 CRC 顺序*1 和 1 个位的 CRC 界定符(用于分隔的位)构成
这个校验是接收方来进行计算的,如果校验出错,则接收方会将错误信息发送到总线上,来通知发送方重新发送

ACK段
ACK 段用来确认是否正常接收。由 ACK 槽(ACK Slot)和 ACK 界定符 2 个位构成。
当前面数据都没问题时,发送方会发送两个位的隐性电平,接收方会回一个显性电平,通知发送方,已经正确接收

帧结束
帧结束是表示该该帧的结束的段。由 7 个位的隐性位(逻辑1)构成。

遥控帧
接收单元向发送单元请求发送数据所用的帧。遥控帧由 6 个段组成。遥控帧没有数据帧的数据段。
组成:


数据帧和遥控帧的不同
遥控帧的 RTR 位为隐性位,没有数据段。
没有数据段的数据帧和遥控帧可通过 RTR 位区别开来。
遥控帧没有数据段,数据长度码该如何表示?
遥控帧的数据长度码以所请求数据帧的数据长度码表示。
没有数据段的数据帧有何用途?
例如,可用于各单元的定期连接确认/应答、或仲裁段本身带有实质性信息的情况下
位填充
位填充是为防止突发错误而设定的功能。当同样的电平持续 5 位时则添加一个位的反型数据。

(1) 发送单元的工作
在发送数据帧和遥控帧时,SOF~CRC 段间的数据,相同电平如果持续 5 位,在下一个位(第 6 个位)则要插入 1 位与前 5 位反型的电平。
(2) 接收单元的工作
在接收数据帧和遥控帧时,SOF~CRC 段间的数据,相同电平如果持续 5 位,需要删除下一个位(第 6 个 位)再接收。如果这个第 6 个位的电平与前 5 位相同,将被视为错误并发送错误帧。
位时序
作用:为了通信的可靠性,可以设置波特率,节点通过位时序来进行同步
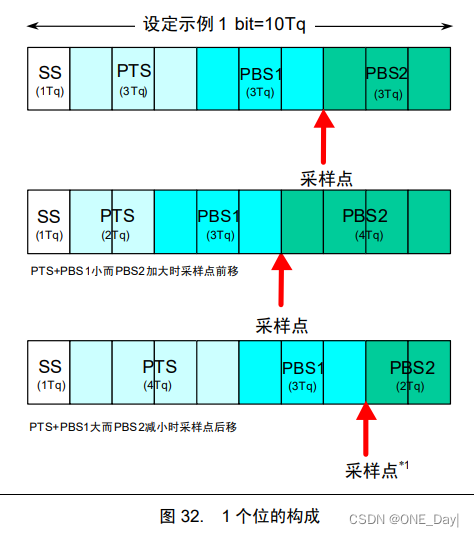
由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位可分为 4 段。
同步段(SS)
传播时间段(PTS)
相位缓冲段 1(PBS1)
相位缓冲段 2(PBS2)
这些段又由可称为 Time Quantum(以下称为 Tq)的最小时间单位构成。 1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。
Tq其实就是最小系统时钟,比如系统分配给CAN总线的时钟是36M,经过4分频,得到9M,那Tq就是1/9M
1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。
通过设定位时序,多个单元可同时采样,也可任意设定采样点。

同步段用于一个隐性电平变为显性电平的一段很小的缓冲时间,也可以是显性电平变为隐性电平,实现时序调整
传播时间段可根据总线的长度来设,如果总线长度长,Tq可以设大点,如果短则可以设小点
相位缓冲段1和相位缓冲段2结合来设置采样点,两个都可以增加或者减少,改变的范围由再同步补偿宽度(SJW)来决定
采样点就是读取总线电平,因为总线会有延时,所以采样点一般设置在电平变化后的50% ~ 80%的区间,这个区间采集的电平就比较稳定

要注意:假如再同步补偿宽度(SJW)为2,因为相位缓冲段2是减少的,不能小于0,所以设置的值必须要大于2,也就是说设置的值要大于SJW,才能减少SJW的值后不小于0
相关文章:
CAN总线通信
CAN总线通信 CAN 是控制器局域网络(Controller Area Network) 的缩写,是 ISO 国际标准化的串行通信协议。 CAN是半双工通信 CAN总线特点 (1) 多主控制 在总线空闲时,所有的单元都可开始发送消息(多主控制…...
MATLAB/Simulink 通信原理及仿真学习(二)
文章目录MATLAB/Simulink 通信原理及仿真学习(二)simulink仿真常用的Simulink库1. 信号源模块库2. 数序运算模块3. 信号输出模块库4.仿真搭建5.搭建自己的库6.S-函数编写MATLAB/Simulink 通信原理及仿真学习(二) simulink仿真 交…...
的操作命令)
CentOS7 防火墙(firewall)的操作命令
CentOS7 防火墙(firewall)的操作命令 安装:yum install firewalld 1、firewalld的基本使用 启动: systemctl start firewalld 查看状态: systemctl status firewalld 禁用,禁止开机启动: s…...

文献工具汇总:论文查找、文献管理、文献翻译
科研人员论文哪里找?文献如何管理?本文给推荐一些提高论文阅读写作效率的一些资料,包括查找论文、文献管理、文献翻译等方面。 一、查找文献 PMC(Pubmed Cenral) Pubmed官方系统中,将免费的全文集中在此,…...

SQL零基础入门学习(三)
SQL零基础入门学习(二) SQL WHERE 子句 WHERE 子句用于提取那些满足指定条件的记录。 SQL WHERE 语法 SELECT column1, column2, ... FROM table_name WHERE condition;参数说明: column1, column2, …:要选择的字段名称&…...

苹果手机如何快速的直接从相册里面的图片提取文字?
//在线工具地址https://ocr.bytedance.zj.cn/image/ImageText在当今信息爆炸的时代,图文并茂已经成为了一个广告宣传的常用方式。然而,图片中的文字信息往往难以获取,尤其对于那些需要快速获取信息的人们来说,阅读图片中的文字会是…...

【go】函数调用
程序中编写的函数在编译阶段会被编译成一段段的指令存放在可执行文件中,在程序运行阶段这些内存会加载到虚拟地址空间的代码段。 当函数A调用了函数B的时候,对应的会生成一条call指令,程序在运行到call指令时就会跳转到对应的B函数的代码段的…...

Linux系统之Uboot、Kernel、Busybox思考之四
目录 三 内核的运行 9 设备树: 1) 设备树产生缘由 2) 设备树方案的流程 3) 有了上述概念,为了支撑整个设备树的工程实现,内核实现以下内容 4) 内核解析设备树 5) 入口分析 6) 解析处理。 10 udev devfs sysfs 11 系统中的USB设备 12 网…...

为什么要经常阅读和分析计算机SCI期刊论文? - 易智编译EaseEditing
训练阅读与分析期刊论文的能力,可以增加中长期的学术竞争力。 只要能够充分掌握阅读与分析期刊论文的技巧,就可以水到渠成地轻松进行「创新」的工作。 所以,只要深入掌握到阅读与分析期刊论文的技巧,就可以掌握到大学生不曾研习过…...

Shiro框架详解
1.Shiro简介 1.1.基本功能点 Shiro 可以非常容易的开发出足够好的应用,其不仅可以用在 JavaSE 环境,也可以用在 JavaEE 环境。Shiro 可以帮助我们完成:认证、授权、加密、会话管理、与 Web 集成、缓存等。 Authentication:身份…...
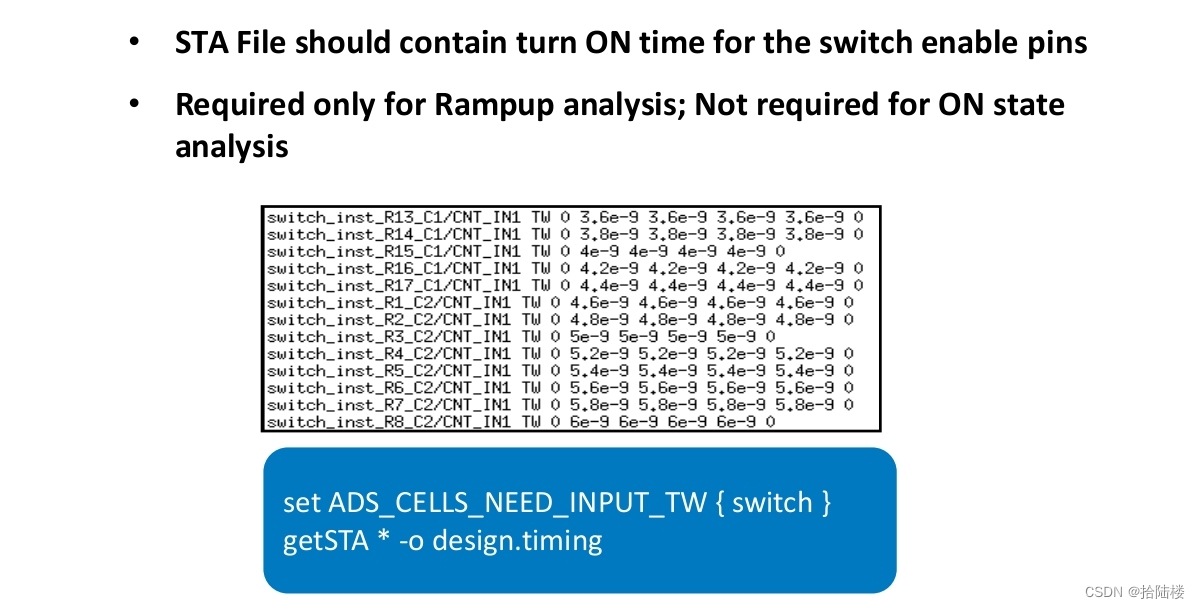
redhawk:GSC file与STA file
1.GSC file redhawk做lowpower分析时需要GSC(Global Switching Configuration)file指导block/instance/power domain的开关状态。 Syntax(in GSR file): GSC_FILES <gsc_FilePathName> Syntax(in GSC file&a…...

【Python学习笔记】46.Python3 math 模块和requests 模块
前言 本章介绍Python的math 模块和requests 模块。 Python math 模块 Python math 模块提供了许多对浮点数的数学运算函数。 math 模块下的函数,返回值均为浮点数,除非另有明确说明。 如果你需要计算复数,请使用 cmath 模块中的同名函数…...

页面导航-yang
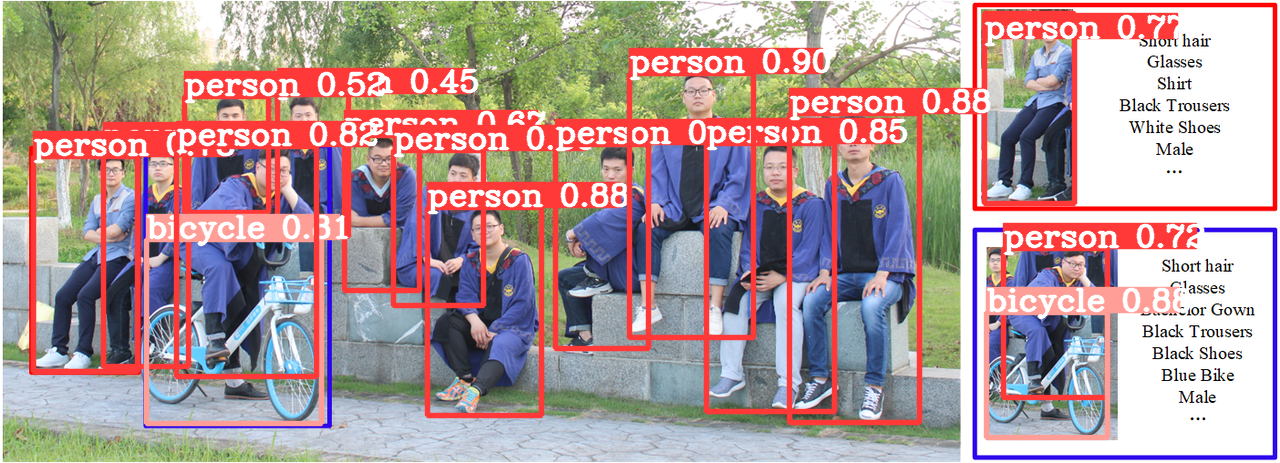
这就是一个简单的导航 👀 机器视觉? 👨🔧 环境搭建 👨🔧 关与Tensorflow-gpu Anaconda Pycharm配置问题解决方案 👼 口罩识别 💻 实时口罩检测mp4视频识别 Ⅰ 💻…...

Mac配置homebrew
mac配置homebrew Homebrew是一款Mac OS平台下的软件包管理工具,拥有安装、卸载、更新、查看、搜索等很多实用的功能。简单的一条指令,就可以实现包管理,而不用你关心各种依赖和文件路径的情况,十分方便快捷。Homebrew主要有四个部…...
如何无报错运行代码YOLOv6,实现目标识别?
YOLOv6是由美团视觉团队开发的1.环境配置我们先把YOLOv6的代码clone下来git clone https://github.com/meituan/YOLOv6.git安装一些必要的包pip install pycocotools2.0作者要求pytorch的版本是1.8.0,我的环境是1.7.0,也是可以正常运行的pip install -r requirement…...

SQL91 返回购买价格为 10 美元或以上产品的顾客列表
描述OrderItems表示订单商品表,含有字段订单号:order_num、订单价格:item_price;Orders表代表订单信息表,含有顾客id:cust_id和订单号:order_numOrderItems表order_numitem_pricea110a21a21a42a…...
Goreplay使用教程0221
1、简介Goreplay 是用 Golang 写的一个HTTP 实时流量复制工具。功能更强大,支持流量的放大、缩小,频率限制,还支持把请求记录到文件,方便回放和分析,也支持和 ElasticSearch 集成,将流量存入 ES 进行实时分…...
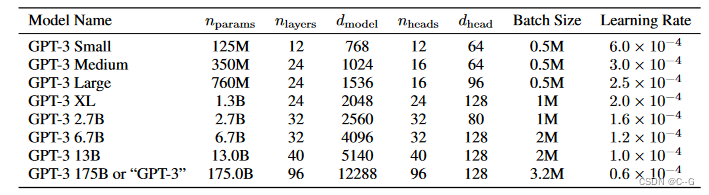
9、GPT-1-2-3
GPT GPT系列即基于Transformer Decoder实现的预训练语言模型,在各类复杂的NLP任务中都取得了不错的效果,如文章生成、代码生成、机器翻译,Q&A等。 对于一个新的任务,GPT仅仅需要非常少的数据便可以理解该任务,并…...

Python-四分位数计算
怎么计算四分位数先理解四分位数怎么计算:可参考https://zhuanlan.zhihu.com/p/235345817,假设数列一共有n个数1)当 (n1)/4可以整除时,Q1第在(n1)/4位Q2第 (n1)/2位Q3第(n1)/4*3位举…...
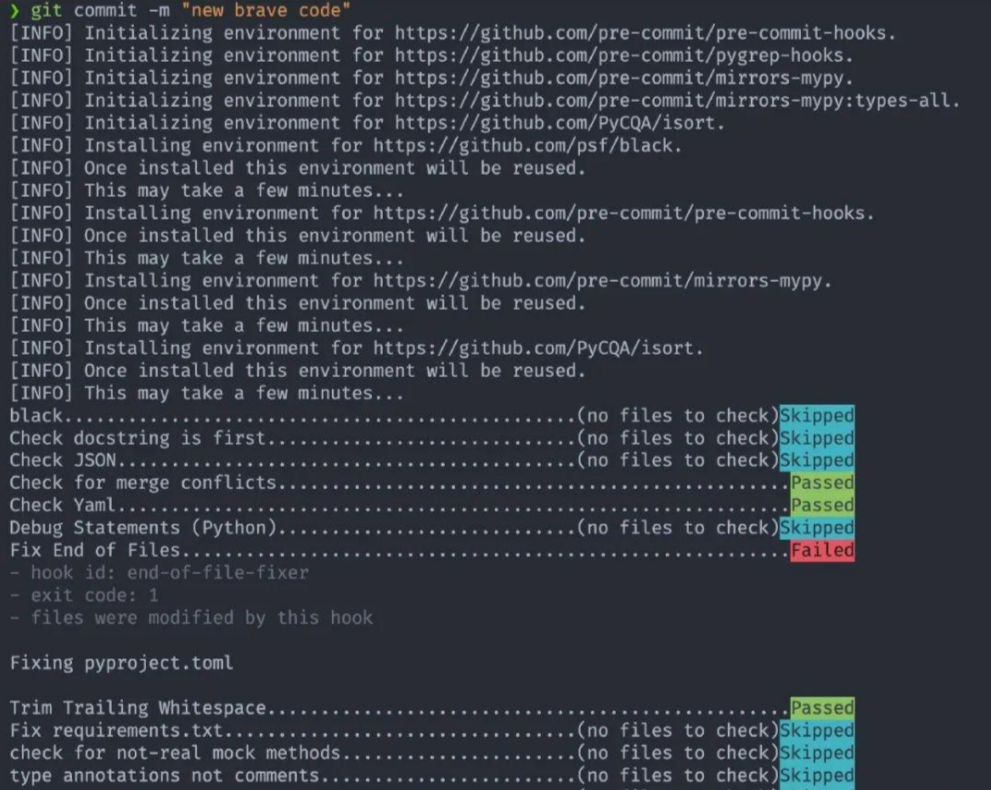
一个简单的步骤让你的 Python 代码更干净
说起来容易做起来难,我们都知道代码可读性非常重要,但是写的时候总是随心所欲,不考虑类型提示、import 排序、PEP8 规范。今天分享一个小技巧,通过一个简单的步骤就可以让你的 Python 代码更干净。这就是 pre-commit:可…...

2026年,本地精准营销高性价比服务商来袭,你还不了解一下?
在本地商业竞争日益激烈的2026年,实体店面临着诸多挑战,引流难、成本高、复购率低等问题困扰着众多商家。而中粤(广州)信息科技有限公司作为本地精准营销的高性价比服务商,正以其独特的优势和卓越的服务,为…...

Redis分布式锁进阶第二十篇
一、本篇前置衔接 第二十篇我们完成了全系列终局复盘,整理了故障排查SOP与企业级落地铁律。常规单资源锁、热点分片锁、隔离锁全部讲透,但真实复杂业务永远不是单一资源:下单要扣库存、扣优惠券、扣积分、冻结余额,多资源并行争抢…...

解决Claude Code访问不稳定与Token不足的痛点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code访问不稳定与Token不足的痛点 许多开发者将Claude Code作为日常编程的得力助手,用于代码生成、问题调试…...

新能源车轻量化为什么开始盯上高强镁合金?
续航,是悬在每一台纯电动汽车头上的达摩克利斯之剑。多充一度电、多堆一些正极材料,是一条路;但还有另一条路——把车造得更轻。 SAE(美国汽车工程师学会)的测算已经被反复引用:整车每减重100千克ÿ…...

百度文心一言开发者如何通过Taotoken低成本接入多模型API
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 百度文心一言开发者如何通过Taotoken低成本接入多模型API 对于已经熟悉并正在使用百度文心一言等国产大模型API的开发者而言&#…...
原理与ScalableHD架构优化实践)
超维计算(HDC)原理与ScalableHD架构优化实践
1. 超维计算(HDC)基础解析超维计算(Hyperdimensional Computing, HDC)是一种受大脑信息处理机制启发的计算范式,其核心思想是用高维随机向量(通常称为超向量或HV)来表示和处理信息。与传统神经网…...

基于USB ACA模式实现安卓手机边玩边充的游戏手柄设计
1. 项目缘起:当手机性能过剩,却败给了触摸屏几年前,我清理手机游戏时,发现一个挺无奈的现象:性能足以媲美掌机的智能手机里,只剩下一些慢节奏的平台解谜或者数独。那些曾经让我在掌机上废寝忘食的赛车、动作…...

航空发动机叶片三维扫描-诺斯顿
航空发动机叶片作为发动机的核心动力部件,其精度与性能直接决定发动机的推力、燃油效率及运行安全性,三维扫描技术作为航空制造领域的核心数字化手段,已广泛应用于叶片全生命周期的多个关键环节。其应用涵盖叶片研发设计阶段的逆向工程&#…...

保姆级教程:在Ubuntu上配置Frida环境,搞定Android App的IO重定向与签名绕过
在Ubuntu上构建Android逆向工程环境:Frida实战与IO重定向技术解析 对于习惯Linux环境的安全研究人员而言,Windows-centric的逆向工具链往往带来诸多不便。本文将系统性地介绍如何在Ubuntu上搭建完整的Android逆向环境,并深入探讨如何利用Frid…...
从模糊到电影级景深:Midjourney + Topaz Gigapixel联调方案(含LUT预设包+PSD分层模板)
更多请点击: https://codechina.net 第一章:从模糊到电影级景深:Midjourney Topaz Gigapixel联调方案(含LUT预设包PSD分层模板) 当Midjourney生成的图像存在主体边缘柔化、背景层次缺失或分辨率不足等问题时…...