leetCode动态规划“不同路径II”
迷宫问题是比较经典的算法问题,一般可以用动态规划、回溯等方法进行解题,这道题目是我昨晚不同路径这道题趁热打铁继续做的,思路与原题差不多,只是有需要注意细节的地方,那么话不多说,直接上coding和解析!
题目描述
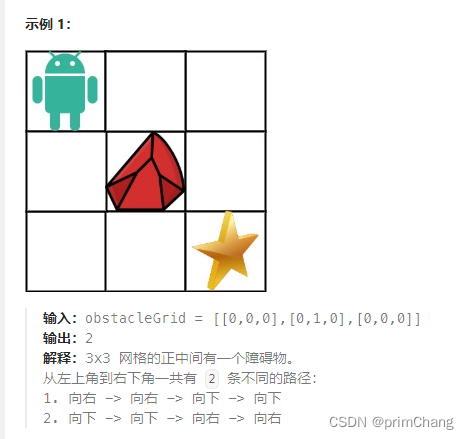
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
解析
如果做过类似迷宫问题的读者,对于这道题目的思路想必也会第一时间想到仍然使用动态规划的思路去解答,但是对于路径中的障碍物在这里却需要着重的单独讨论,因为有了障碍物,那么对于部分目标点的路径数会发生改变。此题目中需要考虑的特殊位置有如下图所示;
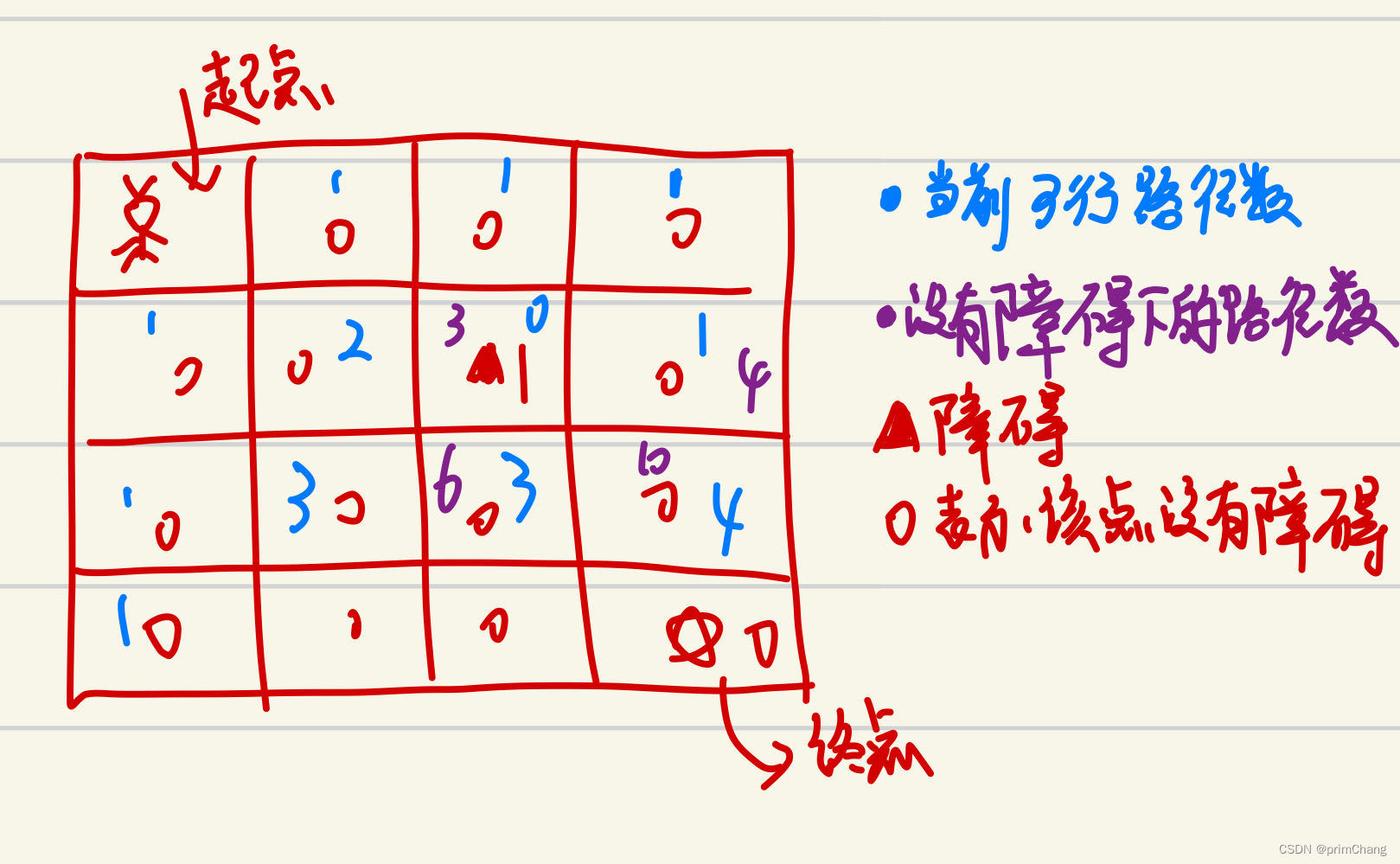
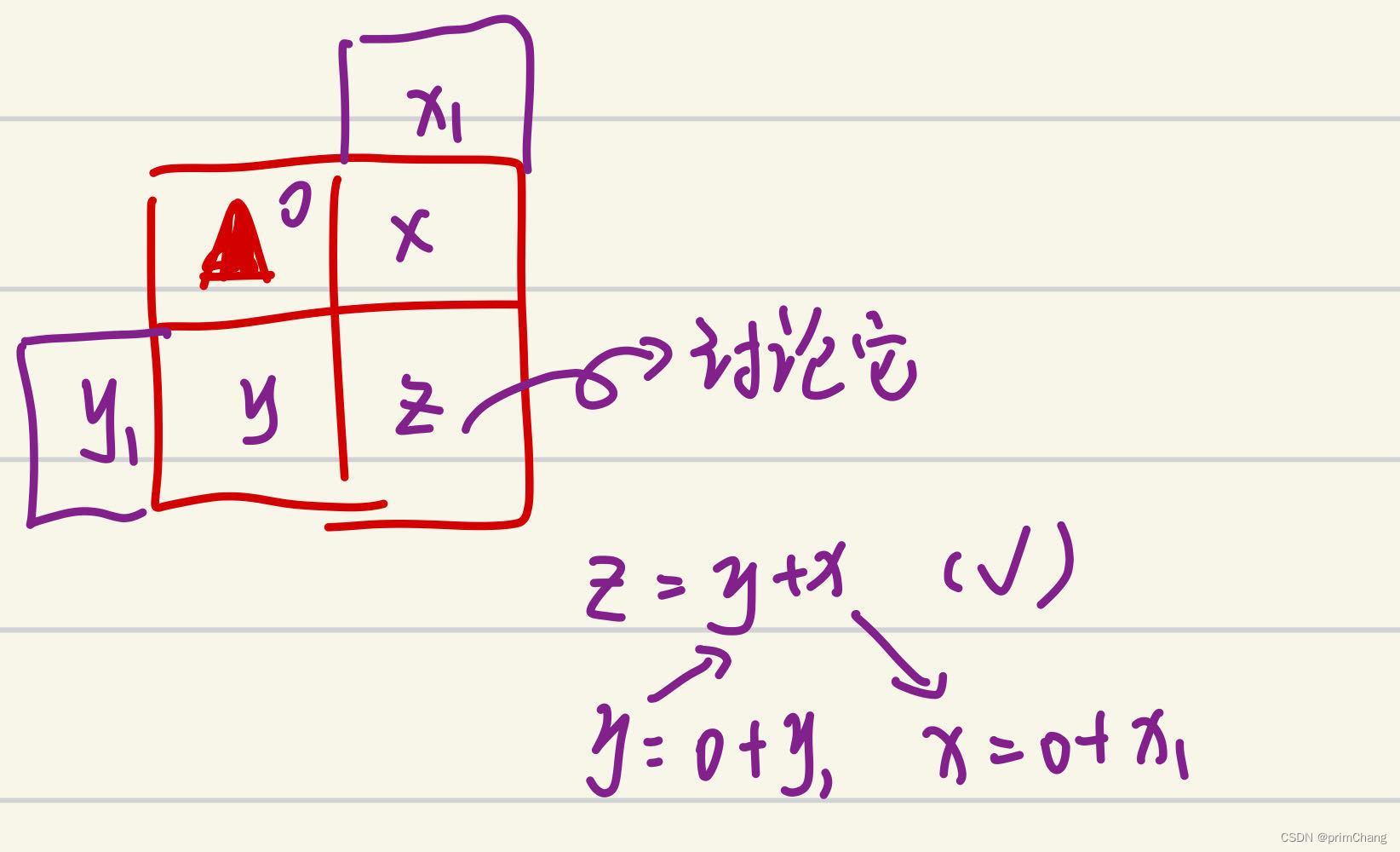
所画图给出了一种情况下的各个点下的路径数,可以看到,对于紫色笔给出的新的当前的节点路径数,仍满足原始状态下的dp[i][j] = dp[i-1][j]+dp[i][j-1]的动态递推式(但对于有障碍的节点不满足,那么障碍节点可达到路径数直接为0),对于迷宫问题,当前节点的可通行路线是由当前节点的左侧节点和正上方节点的可通过路径数相加得到,那对于左上方存在障碍的情况,当前节点的可通过数就需要变化。如下图所示。
这是相对于原始题目的第一处变化,考虑了障碍物,那么就得讨论一下障碍物在某些特殊位置下的特殊情况,比如障碍物在初始行、列上的时候,比如:
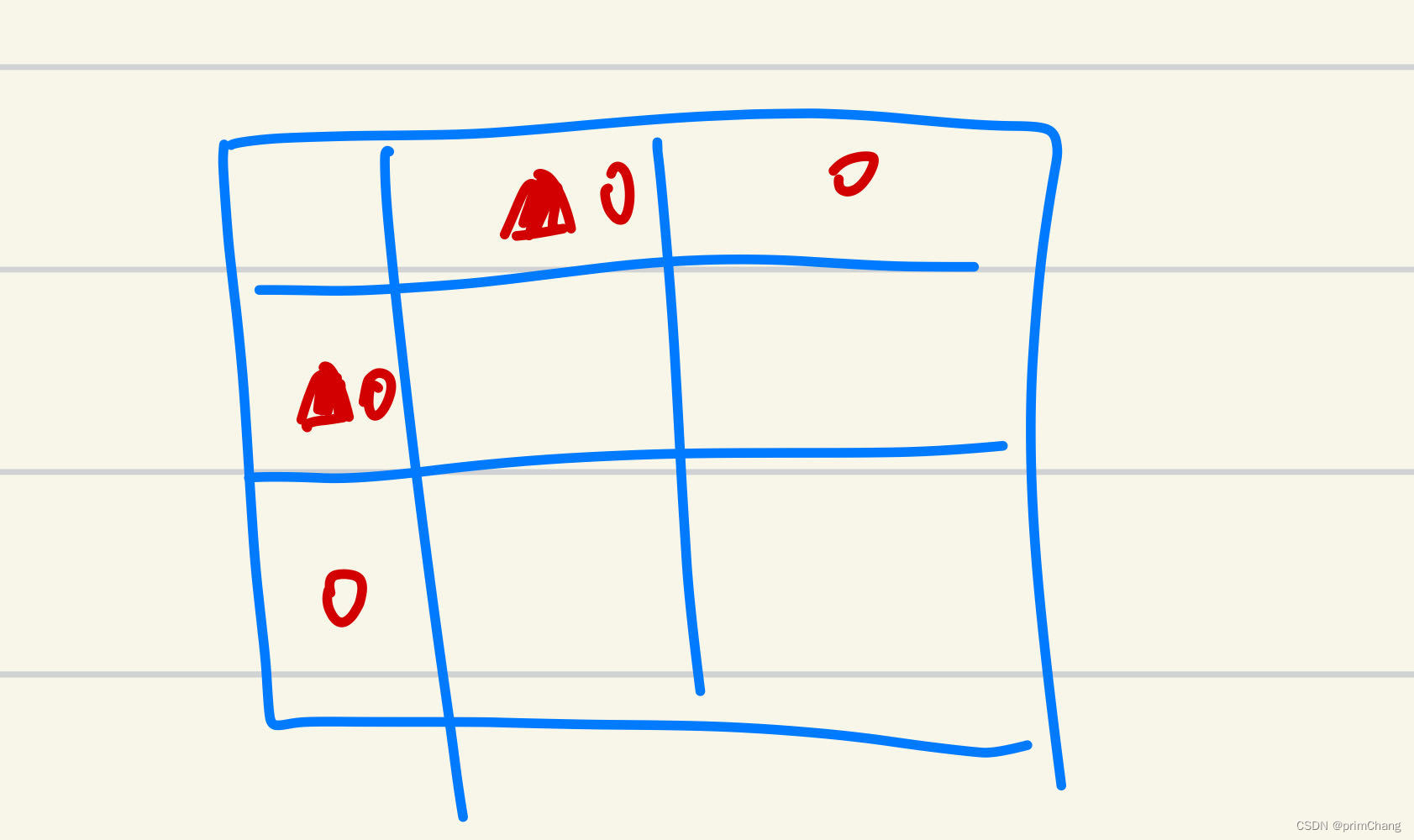
这种情况下,我们就不能单纯的只能把障碍物所处的位置上的路径数置为0,而是要把往后的那一列/一行上的数据都要置为0,为什么,因为机器人只能向下或者向右走,所以,对于初始行、列上的障碍物往后的点,机器人是无法到达的!!!
当然,还剩下最后一个情况,起点就有障碍物,那直接return 0咯~
代码
1.初始化dp数组
//初始化dp数组,我这里全给的-1,方便后续判别障碍物、无障碍物和路径数
int dp[110][110];for(int i=0;i<110;i++){for(int j =0;j<110;j++){dp[i][j] = -1;}}
2.根据地图,将地图中障碍物所处对应的dp数组位置置路径数为0
for(int i=0;i<obstacleGrid.size();i++){for(int j=0;j<obstacleGrid[i].size();j++){if(i == 0 && j ==0){//起点是障碍物if(obstacleGrid[i][j] == 1){return 0;}}if(i == 0){//障碍物在初始行上if(obstacleGrid[i][j] == 1){for(int m = j;m<obstacleGrid[i].size();m++){dp[i][m] = 0;}}}if(j == 0){//障碍物在初始列上if(obstacleGrid[i][j] == 1){dp[i][j] = 0;for(int x = i+1;x<obstacleGrid.size();x++){dp[x][j] = 0;}}}else if(i != 0 && j!= 0){//障碍物不在特殊位置上,那直接对应位置dp设置为0即可if(obstacleGrid[i][j] == 1){dp[i][j] = 0;}}}}
3.计算dp数组
for(int i=0;i<obstacleGrid.size();i++){for(int j=0;j<obstacleGrid[i].size();j++){if(i == 0 || j == 0){if(dp[i][j] == -1){dp[i][j] = 1;}}if(i != 0 && j != 0){if(dp[i][j] != 0){dp[i][j] = dp[i-1][j] + dp[i][j-1];}}}}
4. 完整代码和结果
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {// 跟第一种情况是一样的,只是对于地图中有障碍物的地方,对应的dp数组置为1int dp[110][110];for(int i=0;i<110;i++){for(int j =0;j<110;j++){dp[i][j] = -1;}}for(int i=0;i<obstacleGrid.size();i++){for(int j=0;j<obstacleGrid[i].size();j++){if(i == 0 && j ==0){if(obstacleGrid[i][j] == 1){return 0;}}if(i == 0){if(obstacleGrid[i][j] == 1){for(int m = j;m<obstacleGrid[i].size();m++){dp[i][m] = 0;}// break;}}if(j == 0){if(obstacleGrid[i][j] == 1){dp[i][j] = 0;for(int x = i+1;x<obstacleGrid.size();x++){dp[x][j] = 0;}// break;}}else if(i != 0 && j!= 0){if(obstacleGrid[i][j] == 1){dp[i][j] = 0;}}}}for(int i=0;i<obstacleGrid.size();i++){for(int j=0;j<obstacleGrid[i].size();j++){if(i == 0 || j == 0){if(dp[i][j] == -1){dp[i][j] = 1;}}if(i != 0 && j != 0){if(dp[i][j] != 0){dp[i][j] = dp[i-1][j] + dp[i][j-1];}}// else{// dp[i][j] = dp[i-1][j] + dp[i][j-1];// }}}cout<<dp[obstacleGrid.size()-1][obstacleGrid[0].size()-1];return dp[obstacleGrid.size()-1][obstacleGrid[0].size()-1];}
};

总结
个人感觉,这类题目是十分具有代表性的动态规划算法题 ,为什么这么说,因为动态规划要满足最优子结构,而恰恰这类题的子结构十分清晰,就比如我要知道当前位置有几种路径可以到达,就可以直接从我的前一步,也就是我的左边那一步和正上面的那一步就能到达,也就是我的左边和上面是与我当前可联通的,那么就直接得到了我当前的可通行路径数。有的人可能会说,那这样的话,应该是两者之和再加1才是最终的路径数呀?
其实不然,我最开始也陷入了这样的思维模式中去了,而其实应该这么想,我们所要求的是路径,而不是步数,讨论的不是走了几步,而是有几种到达的方法,换言之就是,只要我能到达左边那个位置或者上面那个位置,那么我一定能够到达当前所求的这个位置,那么也就说明,到达上面/左边位置的路径均能到达我当前的位置,那么两个地方的路径数之和就是到达当前位置的路径数之和~ 这里就不贴图了 ,如果文字描述不清楚,可以结合上面的xyz那张图(也就是所有图中的第三张图)进行结合理解。
动态规划变种很多,前些时候做了些公司面试笔试题 ,发现很多题可以用动态规划来做,但是不得其解,文中的题目是比较清晰的,容易推出动态规划递推式的类型,对于一些变种,还需要多做多总结!欢迎各位读者在评论区进行讨论,有更好的方法我也很愿意与您交流学习!
如果文章对您有帮助,可以点个小赞哦~
相关文章:
leetCode动态规划“不同路径II”
迷宫问题是比较经典的算法问题,一般可以用动态规划、回溯等方法进行解题,这道题目是我昨晚不同路径这道题趁热打铁继续做的,思路与原题差不多,只是有需要注意细节的地方,那么话不多说,直接上coding和解析&a…...
100天精通Python(可视化篇)——第99天:Pyecharts绘制多种炫酷K线图参数说明+代码实战
文章目录 专栏导读一、K线图介绍1. 说明2. 应用场景 二、配置说明三、K线图实战1. 普通k线图2. 添加辅助线3. k线图鼠标缩放4. 添加数据缩放滑块5. K线周期图表 书籍推荐 专栏导读 🔥🔥本文已收录于《100天精通Python从入门到就业》:本专栏专…...
哈希表与有序表
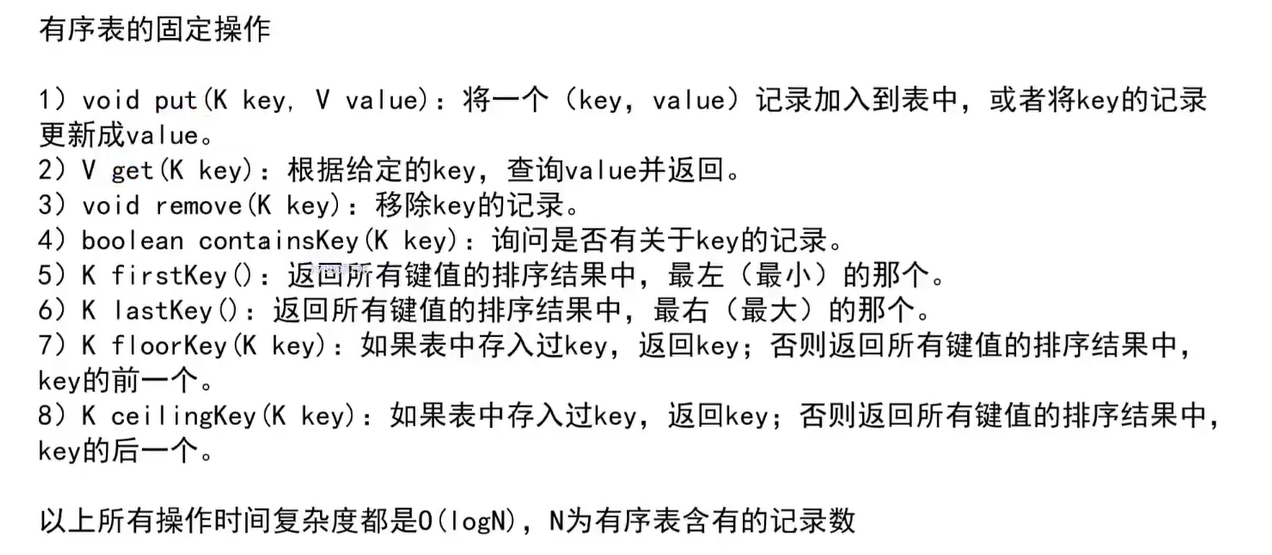
哈希表与有序表 Set结构 key Map结构 key-value 哈希表 哈希表的时间复杂度都是常数项级别的,但常数较大 增删改查的时间都是常数级别的,与数据量无关 当哈希表存储的值是基础数据类型(Integer - int),哈希表中内…...

什么时候使用RPA?如何使用RPA?需要什么样的硬件支持?需要安装哪些软件?
RPA(Robotic Process Automation)是一种用于自动化执行重复性任务的技术,它可以帮助企业提高工作效率,降低人力成本,并减少人为错误。RPA适用于各种行业和场景,例如财务、人力资源、客户服务、IT运维等。 …...
R语言入门——line和lines的区别
目录 0 引言一、 line()二、 lines() 0 引言 首先,从直观上看,lines比line多了一个s,但它们还是有很大的区别的,下面将具体解释这个两个函数的区别。 一、 line() 从R语言的帮助文档中找到,line()的使用,…...
C语言:static关键字的使用
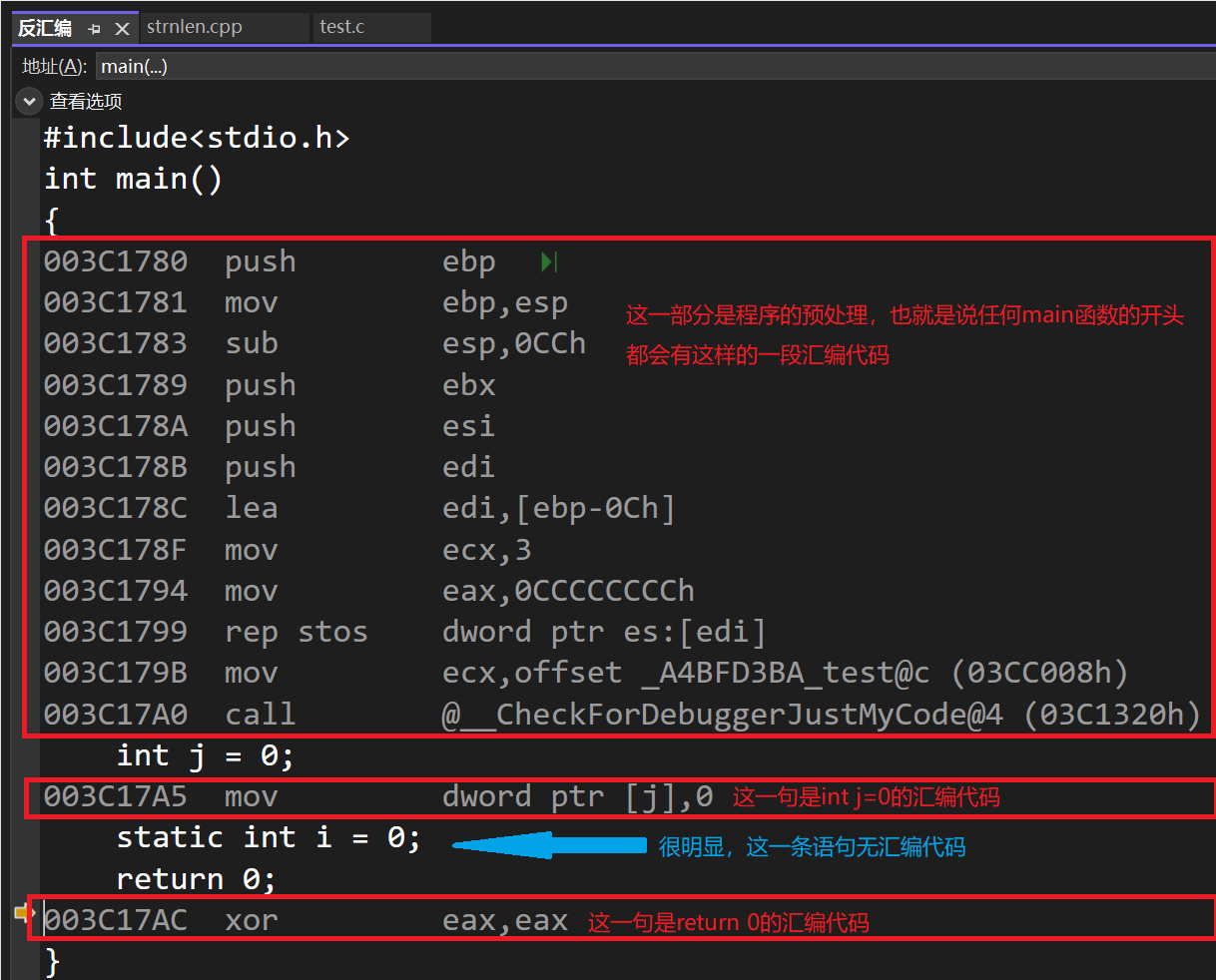
1.static修饰局部变量 这是static关键字使用最多的情况。我们知道局部变量是在程序运行阶段在栈上创建的,但是static修饰的局部变量是在程序编译阶段在代码段(静态区)创建的。所以在static修饰的变量所在函数执行结束后该变量依然存在。 //…...
:ECUM的ISOLAR-AB配置及代码解析)
AUTOSAR知识点 之 ECUM (三):ECUM的ISOLAR-AB配置及代码解析
目录 1、概述 2、ISOLAR-AB配置 2.1、EcuMGeneral 2.2、EcuMConfiguration 2.2.1、EcuMDefaultShutdownTarget 2.2.2、EcuMDriverInitListOne...
2023年MySQL-8.0.34保姆级安装教程
重点放前面:演示环境为windows环境。 MySQL社区版本安装教程如下: 一、MySQL安装包下载二、安装配置设置三、配置环境变量 大体分为3个步骤:①安装包的下载;②安装配置设置;③配置环境变量 一、MySQL安装包下载 下载官…...
ElasticSearch入门
一、基本命令_cat 1、查看节点信息 http://192.168.101.132:9200/_cat/nodes2、查看健康状况 http://192.168.101.132:9200/_cat/health3、查看主节点的信息 http://192.168.101.132:9200/_cat/master4、查看所有索引 http://192.168.101.132:9200/_cat/indices二、索引一…...

RocketMQ的Broker
1 Broker角色 Broker角色分为ASYNC_MASTER (异步主机)、SYNC_MASTER (同步主机)以及SLAVE (从机)。如果对消息的可靠性要求比较严格,可以采用SYNC_MASTER加SLAV E的部署方式。如果对消息可靠性要求不高,可以采用ASYNC_MASTER加ASL AVE的部署方式。如果只…...

使用Puppeteer进行游戏数据可视化
导语 Puppeteer是一个基于Node.js的库,可以用来控制Chrome或Chromium浏览器,实现网页操作、截图、测试、爬虫等功能。本文将介绍如何使用Puppeteer进行游戏数据的爬取和可视化,以《英雄联盟》为例。 概述 《英雄联盟》是一款由Riot Games开…...

【Flask】from flask_sqlalchemy import SQLAlchemy报错
【可能出现的情况】 1、未安装 Flask-SQLAlchemy: 在使用 flask_sqlalchemy 之前,你需要确保已经通过 pip 安装了 Flask-SQLAlchemy。可以通过以下命令安装它: pip install Flask-SQLAlchemy 2、包名大小写问题: Python 是区分大…...

索引简单概述(SQL)
一、什么是索引? 索引是一种特殊的文件(InnoDB数据表上的索引是表空间的一个组成部分),他们包含着对数据表里所有记录的引用指针。 索引是一种数据结构。数据库索引,是数据库管理系统中一个排序的数据结构࿰…...

union all 和 union 的区别,mysql union全连接查询
602. 好友申请 II :谁有最多的好友(力扣mysql题,难度:中等) RequestAccepted 表: ------------------------- | Column Name | Type | ------------------------- | requester_id | int | | accepter_id | int | | accept_date …...

UDP和TCP的区别
UDP (User Datagram Protocol) 和 TCP (Transmission Control Protocol) 是两种常见的传输层协议。它们在设计和用途上有很大的区别,以下是它们的主要差异: 连接性: TCP: 是一个连接导向的协议。它首先需要建立连接,数据传输完毕后再终止连接…...

阿里云 MSE 助力开迈斯实现业务高增长背后带来的服务挑战
开迈斯新能源科技有限公司于 2019 年 5 月 16 日成立,目前合资股东分别为大众汽车(中国)投资有限公司、中国第一汽车股份有限公司、一汽-大众汽车有限公司[增资扩股将在取得适当监督(包括反垄断)审批后完成]、万帮数字…...
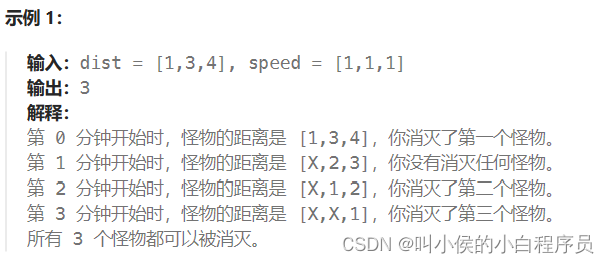
消灭怪物的最大数量【力扣1921】
一、题目分析 需要满足的条件: 只能在每分钟的开始使用武器武器能杀死距离城市最近的怪兽怪兽到达城市就会输掉游戏 游戏最优策略:我们可以在每分钟的开始都使用一次武器,用来杀死距离城市最近的怪兽。这样可以在力所能及的范围内…...

数据结构之算法
算法的基本概念 计算机解题的过程实际上是在实施某种算法,这种算法称为计算机算法 算法的基本要素 一个算法是由两种基本要素组成:一是对数据对象的运算和操作;二是算法的控制结构 算法中对数据的运算和操作 在一般计算机系统中…...

MyBatis与MyBatis-Plus的分页以及转换
一、介绍 MyBatis和MyBatis-Plus都是Java持久化框架,用于简化数据库访问和操作。它们提供了面向对象的方式来管理关系型数据库中的数据。 MyBatis是一个轻量级的持久化框架,通过XML或注解配置,将SQL语句与Java对象进行映射,使开…...
 套接字协议及其数据传输特性)
TCP/IP网络编程(二) 套接字协议及其数据传输特性
文章目录 套接字协议及其数据传输特性关于协议创建套接字协议族套接字类型1:面向连接的套接字(SOCK_STREAM)套接字类型2:面向消息的套接字(SOCK_DGRAM)协议的最终选择面向连接的套接字:TCP套接字…...

基于CMS8S6990评估板实现高精度电压电流测量:从血氧仪到通用测量工具的移植实践
1. 项目缘起与核心思路最近终于拿到了中微半导体(CMSemicon)正版的CMS8S6990血氧仪开发板。这块板子给我的第一印象就是“精致”,尺寸不大,但该有的接口和功能一应俱全,颇有点“麻雀虽小,五脏俱全”的味道。…...

国内开通 GPT 会员的自助充值流程记录
国内用户开通 GPT Plus / Pro,比较常见的卡点是支付方式、流程步骤和账号安全。我看了下 cdk.hohy6.com 这个页面,它的流程比较直接:选择套餐,填写 Session Token,支付宝付款,然后系统为自己的 ChatGPT 账号…...

Vivado用户必看:中文用户名导致Vscode关联失效?手把手教你修改vivado.xml文件
Vivado与Vscode联动的终极解决方案:彻底攻克中文路径兼容性问题 在FPGA开发领域,Vivado作为Xilinx推出的旗舰级开发工具,与轻量级代码编辑器Vscode的联动已经成为提升开发效率的标准配置。然而,许多中文用户在实际操作中常常遇到…...
)
R语言+ggplot2:手把手教你绘制Cell期刊同款世界地图采样图(附完整代码与数据)
R语言ggplot2:手把手教你绘制Cell期刊同款世界地图采样图(附完整代码与数据) 在科研论文中,一张精美的世界地图采样图往往能直观展示研究样本的全球分布,为论文增色不少。顶级期刊如Cell、Nature、Science上的文章&…...

从图形界面到命令行:Win11文件管理效率提升指南,用CMD批量删除旧项目文件夹实战
从图形界面到命令行:Win11文件管理效率提升指南,用CMD批量删除旧项目文件夹实战 在数字时代,文件管理效率直接影响工作流程的顺畅程度。对于开发者、设计师和数据分析师这类经常需要处理大量项目文件的专业人士来说,如何快速清理不…...
)
手把手教你用MP1470芯片设计一个12V转5V的DCDC降压模块(附完整原理图与PCB布局避坑指南)
手把手教你用MP1470芯片设计一个12V转5V的DCDC降压模块(附完整原理图与PCB布局避坑指南) 在嵌入式系统开发中,稳定可靠的电源设计往往是项目成功的关键前提。当我们需要为STM32、ESP32等微控制器或各类传感器供电时,如何将常见的1…...

GIFT高级技巧:图像组合、并行处理和性能优化的终极指南
GIFT高级技巧:图像组合、并行处理和性能优化的终极指南 【免费下载链接】gift Go Image Filtering Toolkit 项目地址: https://gitcode.com/gh_mirrors/gi/gift GIFT(Go Image Filtering Toolkit)是一个强大的Go语言图像处理库&#x…...

GPT-4高考全真模拟测试:能力边界、技术原理与教育启示
1. 项目缘起与核心目标最近,我身边不少朋友,尤其是家里有考生的,都在讨论一个话题:现在这些大语言模型,比如GPT-4,到底有多“聪明”?它能不能像人一样思考,甚至去参加我们的高考&…...

折叠Cascode运放设计避坑指南:从90dB增益掉到60dB?可能是这5个细节没做好
折叠Cascode运放设计避坑指南:从90dB增益掉到60dB?可能是这5个细节没做好 在模拟IC设计的深水区,折叠Cascode运算放大器就像一位优雅的芭蕾舞者——看似轻盈的架构下隐藏着对每个技术细节的极致把控。当您精心设计的电路从仿真器中吐出60dB增…...

上机器人真能省人吗,先看这几个车间实情
就以我自己的视角,给同样想推动自动化改造的工厂管理者们,聊聊这里面的门道和实在账。很多人问我,你们做自动化集成的是不是就爱忽悠老板砸钱上机器人?听着光鲜,最后落灰的“铁疙瘩”我见得多了。我是自动化老厂的二代…...