uniapp移动端地图,点击气泡弹窗并实现精准定位
记录移动端地图map组件的使用
需求记录:
移动端地图部分需要展示两个定位点,上报点及人员定位点。通过右上角的两个按钮实现地图定位。点击对应定位气泡,弹出定位点的信息。
效果图如下:

map在nvue中的使用。直接用nvue可以直接调整层级,可以覆盖住map组件。在map组件上添加按钮控制,实现交互。map组件内添加按钮使用cover-image如下:
<view><map id="map" class="map" :scale="15" ref="map" style="width:320px;height:500px;margin-left: 30px;":latitude="latitude" :longitude="longitude" :markers="cover"><view class="btnStyle"><cover-image src="../../static/images/people.png" class="removeToReal" @tap="removeToReal"></cover-image><cover-image src="../../static/images/gaodeMap.png" style="margin-top: 18px;" class="removeToMap" @tap="removeToMap"></cover-image></view></map>
</view>js部分:
<script>export default {data() {return {// 地图mapContext: null,latitude: null,longitude: null,latitudeReal: null,longitudeReal: null,cover: [],}},methods: {// 移动到对应点坐标removeToReal() {this.mapContext.moveToLocation({latitude: this.latitudeReal,longitude: this.longitudeReal});},// 移动到对应点坐标removeToMap() {this.mapContext.moveToLocation({latitude: this.latitude,longitude: this.longitude});},// 关键代码:// 加载坐标点及气泡。(data参数中包含了所需的所有数据,以下仅为气泡弹窗的代码示例参考)async setMarkers(data) {let latlng = JSON.parse(data.inspectorLocation)let reallatlngTurn = this.wgs84_gcj02(latlng[0],latlng[1])let realatlng = JSON.parse(data.inspectorRealsite)let realTurn = this.wgs84_gcj02(realatlng[0],realatlng[1])this.longitude = reallatlngTurn[0]this.latitude = reallatlngTurn[1]this.longitudeReal = realTurn[0]this.latitudeReal = realTurn[1]let markers = []let markerInspector = {id: 'id_' + 'inspectorLocation',latitude: reallatlngTurn[1],longitude: reallatlngTurn[0],width: 30,height: 35,iconPath: '../../static/images/position2.png',callout:{//自定义标记点上方的气泡窗口 点击有效 content: ` 上报点任务单号:${data.taskSn}任务类型:外部任务派发时间:${data.dispatchTime.slice(0,10)}上报人: ${data.inspectorName}经度: ${latlng[0].toFixed(6)}纬度: ${latlng[1].toFixed(6)}`,//文本color: '#ffffff',//文字颜色fontSize: 14,//文本大小borderRadius: 15,//边框圆角borderWidth: '10',padding: '10',textAlign: 'left',bgColor: '#e51860',//背景颜色display: 'BYCLICK',//常显}}markers.push(markerInspector)let markerReal = {id: 'id_' + 'realLocation',latitude: realTurn[1],longitude: realTurn[0],callout:{//自定义标记点上方的气泡窗口 点击有效content: ` 定位点任务单号:${data.taskSn}任务类型:外部任务上报人: ${data.inspectorName}角色: ${people}派发时间:${data.dispatchTime.slice(0,10)}经度: ${realatlng[0]}纬度: ${realatlng[1]}`,//文本color: '#ffffff',//文字颜色fontSize: 14,//文本大小borderRadius: 15,//边框圆角borderWidth: '10',padding: '10',textAlign: 'left',bgColor: '#e51860',//背景颜色display: 'BYCLICK',//常显}}markers.push(markerReal)this.cover=markers},onLoad(options) {this.mapContext = uni.createMapContext("map", this);}
</scritpt>
相关文章:
uniapp移动端地图,点击气泡弹窗并实现精准定位
记录移动端地图map组件的使用 需求记录: 移动端地图部分需要展示两个定位点,上报点及人员定位点。通过右上角的两个按钮实现地图定位。点击对应定位气泡,弹出定位点的信息。 效果图如下: map在nvue中的使用。直接用nvue可以直接…...

2023牛客暑期多校训练营7 CI「位运算」「根号分治+容斥」
C-Beautiful Sequence_2023牛客暑期多校训练营7 (nowcoder.com) 题意: 给定一个b序列,a序列满足 a [ i − 1 ] < a [ i ] a[i-1]<a[i] a[i−1]<a[i]且 a [ i ] ⊕ a [ i 1 ] b [ i ] a[i]\oplus a[i1]b[i] a[i]⊕a[i1]b[i],求字…...
YOLOv5算法改进(10)— 替换主干网络之GhostNet
前言:Hello大家好,我是小哥谈。GhostNet是一种针对计算机视觉任务的深度神经网络架构,它于2020年由中国科学院大学的研究人员提出。GhostNet的设计目标是在保持高精度的同时,减少模型的计算和存储成本。GhostNet通过引入Ghost模块…...

Android Canvas的使用
android.graphics.Canvas 一般在自定义View中,重写 onDraw(Canvas canvas) 方法时用到。 /*** Implement this to do your drawing.** param canvas the canvas on which the background will be drawn*/Overrideprotected void onDraw(Canvas canvas) {super.onDra…...
)
AI批量写文章伪原创:基于ChatGPT长文本模型,实现批量改写文章、批量回答问题(长期更新)
import traceback import openai import osopenai.api_key = ""conversation=[{"role": "system", "content": "You are a helpful assistant."}] max_history_len = 20 first_message = Nonedir = rJ:\ai\input #要改写的文…...

git常用场景记录 | 拉取远程分支A合并到本地分支B - 删除上一次的commit
文章目录 git常用场景记录拉取远程分支A合并到本地分支B本地分支B存在未add与commit的代码 删除上一次的commit已经push到远程库 git常用场景记录 doing,最后更新9.5 拉取远程分支A合并到本地分支B 需求描述 在团队合作时,我自己的本地分支B功能已经实现…...
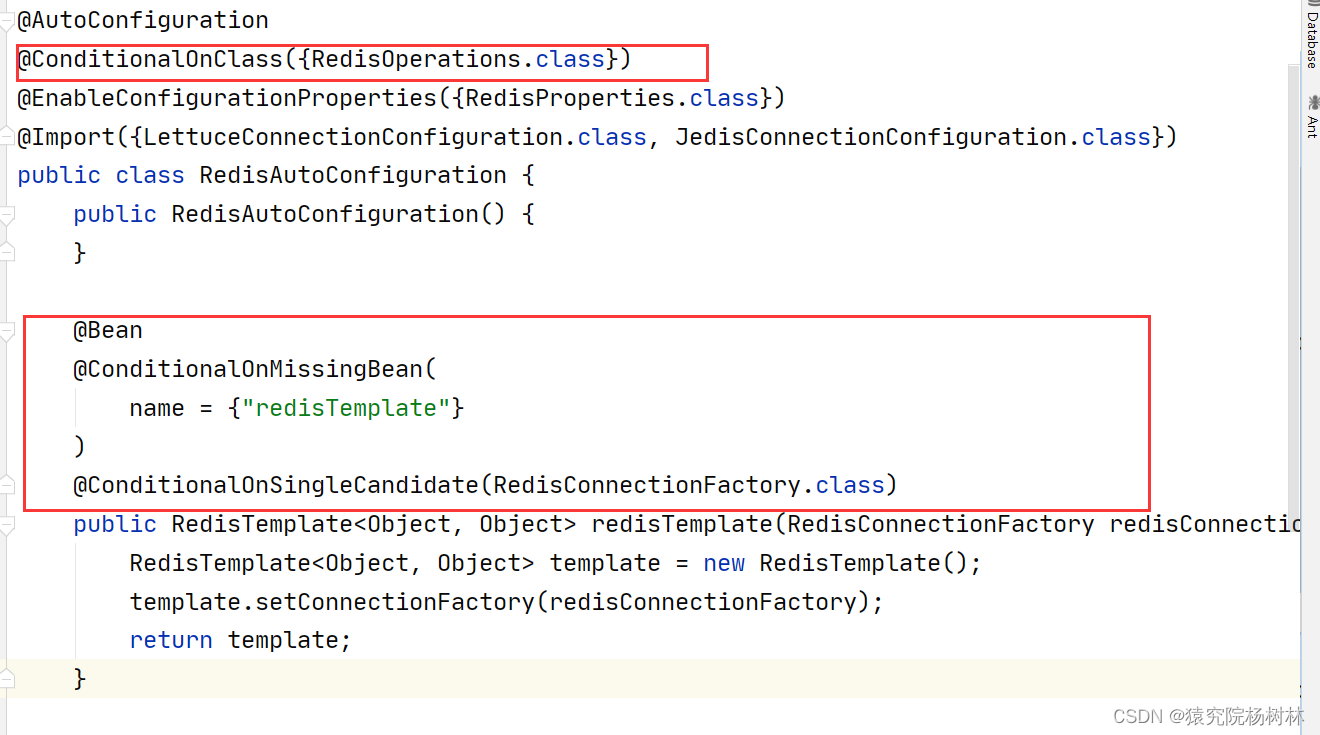
源码角度解析SpringBoot 自动配置
文章目录 前言一、了解相关注解1.Condition注解2.Enable注解 二、SpringBoot自动配置1.SpringBootApplication注解2.SpringBootConfiguration注解3.EnableAutoConfiguration注解4.Conditional注解 总结 前言 Spring Boot 自动配置是 Spring Boot 的核心特性之一,它…...

【原创】H3C路由器OSPF测试
网络拓扑图 路由器配置: 路由器1上接了4跟线,分别为这四个接口配置IP地址。 # interface GigabitEthernet0/0/0port link-mode routecombo enable copperip address 2.1.1.2 255.255.255.0 # interface GigabitEthernet0/0/1port link-mode routecombo…...

计算机视觉:轨迹预测综述
计算机视觉:轨迹预测综述 轨迹预测的定义轨迹预测的分类基于物理的方法(Physics-based)基于机器学习的方法(Classic Machine Learning-based)基于深度学习的方法(Deep Learning-based)基于强化学…...

三维跨孔电磁波CT数据可视化框架搭建
三维跨孔电磁波CT数据可视化框架搭建 文章目录 三维跨孔电磁波CT数据可视化框架搭建1、三维CT可视化结果2、matlab代码2.1、CT数据格式整理并保存2.2、三维可视化 利用matlab实现对跨孔电磁波CT实测数据反演,并搭建了三维CT数据可视化框架,可装填实测CT反…...

OC和Swift混编,导入头文件‘xxx-Swift.h‘ file not found
在OC的项目里加入Swift代码,创建完桥接文件后,需要倒入Swift头文件,头文件的格式为“项目名-Swift.h”。 如下图,我在Xcode上看到我的项目名为YichangPark,导入 #import "YiChangPark-Swift.h" 之后提示 “Y…...
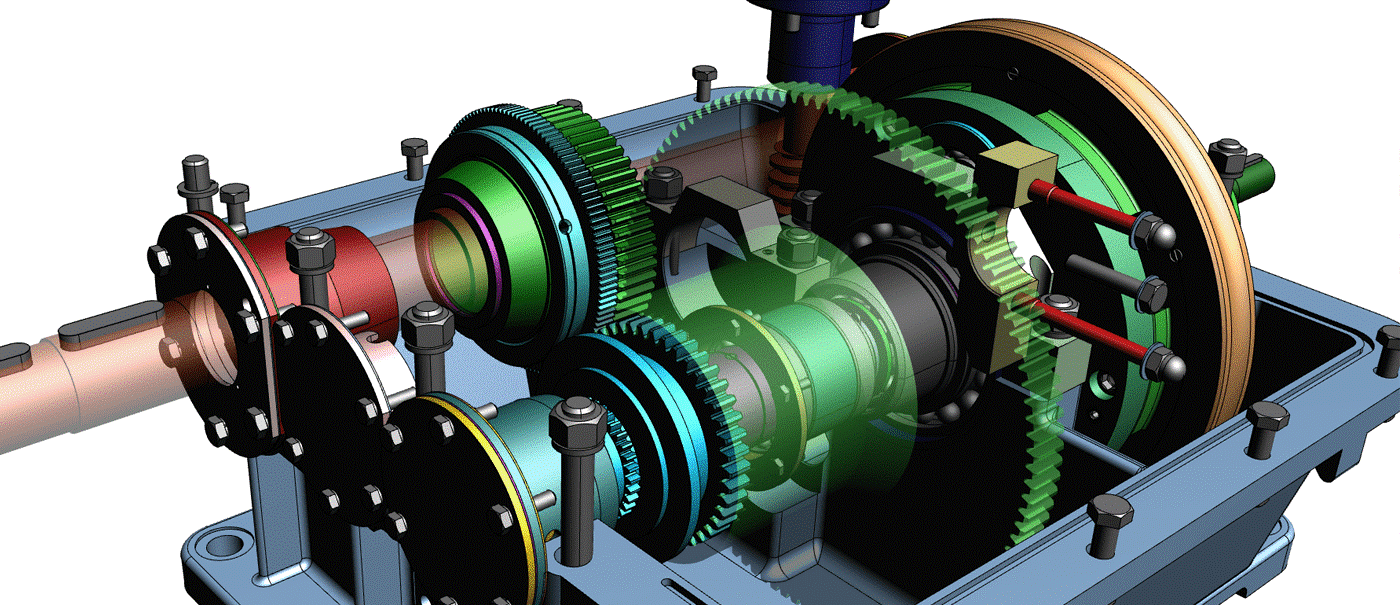
一文读懂HOOPS Native平台:快速开发桌面端、移动端3D应用程序!
HOOPS Native Platform是用于在桌面和移动平台以及混合现实应用程序上构建3D工程应用程序的首要工具包。它由三个集成良好的软件开发工具包(SDK)组成:HOOPS Visualize、HOOPS Exchange、HOOPS Publish。HOOPS Visualize 是一个强大的图形引擎,适用于本机…...

Scrum工作模式及Scrum工具
Scrum工作模式是一种敏捷软件开发方法,其核心是团队合作和自我组织,旨在通过短周期的迭代开发,实现快速反馈和持续改进。 Scrum工作模式包括以下角色和活动: 1、产品负责人(Product Owner):负…...
[ros][ubuntu]ros在ubuntu18.04上工作空间创建和发布一个话题
构建catkin工作空间 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace cd ~/catkin_ws/ catkin_make 配置环境变量 echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc 检查环境变量 echo $ROS_PACKAGE_PATH…...

我的区块链笔记
区块链 中心化的账本,个人节点和中心节点的地位不对等,中心节点说了算。去中心化,个人节点就是公平的,根据一套规则,叫做公比机制。 区块链的本质,就是数据存储方式 区块链使用密码学算法产生的区块&…...

Spring事务(ACID特性、隔离级别、传播机制、失效场景)
一、事务的ACID特性 原子性(Atomicity) 原子性是指事务是一个不可分割的工作单位,事务中的操作要么都发生,要么都不发生。一致性(Consistency) 事务前后数据的完整性必须保持一致。隔离性(Isola…...

机器学习笔记之最优化理论与方法(六)无约束优化问题——最优性条件
机器学习笔记之最优化理论与方法——无约束优化问题[最优性条件] 引言无约束优化问题无约束优化问题最优解的定义 无约束优化问题的最优性条件无约束优化问题的充要条件无约束优化问题的必要条件无约束优化问题的充分条件 引言 本节将介绍无约束优化问题,主要介绍无…...

E5061B/是德科技keysight E5061B网络分析仪
181/2461/8938产品概述 是德科技E5061B(安捷伦)网络分析仪在从5 Hz到3 GHz的宽频率范围内提供通用的高性能网络分析。E5061B提供ENA系列常见的出色RF性能,还提供全面的LF(低频)网络测量能力;包括内置1 Mohm输入的增益相位测试端口。E5061B从低频到高频的…...
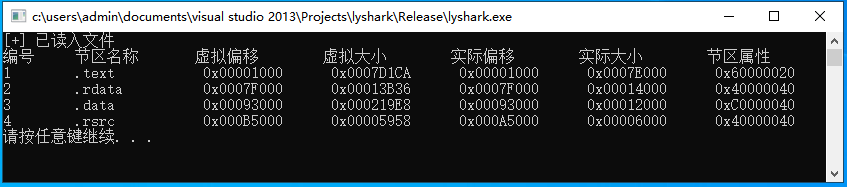
2.4 PE结构:节表详细解析
节表(Section Table)是Windows PE/COFF格式的可执行文件中一个非常重要的数据结构,它记录了各个代码段、数据段、资源段、重定向表等在文件中的位置和大小信息,是操作系统加载文件时根据节表来进行各个段的映射和初始化的重要依据…...
Vue2项目练手——通用后台管理项目第五节
Vue2项目练手——通用后台管理项目 首页组件布局面包屑&tag面包屑使用组件使用vuex存储面包屑数据src/store/tab.jssrc/components/CommonAside.vuesrc/components/CommonHeader.vue tag使用组件文件目录CommonTag.vueMain.vuetabs.js 用户管理页新增功能使用的组件页面布局…...

低代码平台表单设计器 unione form editor 布局组件 — 折叠面板
低代码平台表单设计器 unione-form-editor 布局组件 —— 折叠面板 在企业级表单越来越长、内容越来越多的今天,如何让表单保持简洁、可收起、可展开、层级清晰,成为提升填写体验的关键。继栅格、卡片、标签、段落布局之后,今天为大家介绍 折…...

Circuit事件处理深度解析:如何优雅处理用户交互
Circuit事件处理深度解析:如何优雅处理用户交互 【免费下载链接】circuit ⚡️ A Compose-driven architecture for Kotlin and Android applications. 项目地址: https://gitcode.com/gh_mirrors/cir/circuit 在构建现代化的Android和Kotlin应用时ÿ…...

chatgpt-web-midjourney-proxy的TypeScript类型系统:类型安全的AI应用开发
chatgpt-web-midjourney-proxy的TypeScript类型系统:类型安全的AI应用开发 在当今AI技术快速发展的时代,如何构建稳定可靠的AI应用成为开发者面临的重要挑战。chatgpt-web-midjourney-proxy项目通过精心设计的TypeScript类型系统,为开发者提供…...

AI 写的鸿蒙 ArkTS 代码能跑?我测了 37 个案例,翻车率 60%
先扔结论:如果你现在把 Claude 或 Cursor 当成 ArkTS 专家来用,大概率会掉坑里。我上周闲得慌,跑了 37 个常见开发场景的测试,结果 AI 生成的代码能直接编译通过的,不到四成。剩下的要么语法错误,要么用了废…...

CTF 实战必备 Hashcat 密码破解工具 零基础全套教程
HashCat密码破解工具介绍 hashcat号称世界上最快的密码破解,世界上第一个和唯一的基于GPU的规则引擎,免费多GPU(高达128个GPU),多哈希,多操作系统(Linux和Windows本地二进制文件)&a…...

【C++笔记】内存管理流食般投喂
声明:以下知识相关资料来自比特官网和小编手搓~C/C内存管理1、C/C内存分布2、C语言中动态内存管理方式:malloc/calloc/realloc/free3、C内存管理方式3.1、new/delete操作内置类型3.2、new和delete操作自定义类型4、operator new 与 operator delete 函数…...
)
高性价比AI编程神器Claude Code+deepseek v4 pro+vscode——详细安装指南(2026最新版)
一.简介 这套组合性价比极高。关于Claude Code:它由Anthropic公司打造,是直接运行在终端中的AI编程助手,让你不用离开命令行就能完成代码生成、调试、重构、甚至Git提交等各种开发任务。本文将带你完成安装与配置。众所周知Claude 模型集强大…...

Node.js 流处理:高效处理大数据的艺术
Node.js 流处理:高效处理大数据的艺术 什么是流? 在 Node.js 中,流(Stream)是处理大量数据的抽象接口。它允许我们逐块读取或写入数据,而不需要一次性将全部数据加载到内存中。 为什么需要流? 想…...

如何免费突破网盘限速?8大平台直链下载终极指南
如何免费突破网盘限速?8大平台直链下载终极指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 /…...

如何用OpenCATS免费开源招聘系统3天搭建企业级人才库
如何用OpenCATS免费开源招聘系统3天搭建企业级人才库 【免费下载链接】OpenCATS Open-source applicant tracking system (ATS) and recruitment CRM for staffing agencies and hiring teams. 项目地址: https://gitcode.com/gh_mirrors/op/OpenCATS 还在为招聘流程混乱…...