[ros][ubuntu]ros在ubuntu18.04上工作空间创建和发布一个话题
构建catkin工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
配置环境变量
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
检查环境变量
echo $ROS_PACKAGE_PATH
遇到错误:上面操作不需要用sudo 进行操作,但是由于初学者可能存在操作不当导致错误
ros catkin_maked的时候报错误代码:
The specified base path “/home/ubuntu/catkin_ws” contains a CMakeLists.txt but “catkin_make” must be invoked in the root of workspace…..
出现这种情况的原因是catkin_init_workspacce的时候,出现下面这句:
Creating symlink “/home/ubuntu/catkin_ws/CMakeLists.txt” pointing to “/opt/ros/indigo/share/catkin/cmake/toplevel.cmake”
将当前工作空间下的CMakeLists.txt与/ros/下的cmake做了链接
解决方法:
unlink /home/youpath/catkin_ws/CMakeLists.txt
发布一个话题案例:
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg package1 roscpp rospy std_msgs使用命令cd ~/catkin_ws/src 进入代码空间,并在代码空间中创建功能包
使用catkin_create_pkg创建名为package1的功能包,功能包的支撑库为roscpp rospy和std_msgs,创建功能包的命令格式为catkin_create_pkg <package_name> [depends1] [depends2] [depends3]。此时~/catkin_ws/src路径下会出现两个文件,一个是CMakeLists.txt另外一个则是我们的功能包package,在package路径下会出现4个文件,分别是include文件夹(用于存放类似于.h的头文件),src文件夹(用于存放cpp文件),CMakeLists.txt(指定编译的规则),package.xml(支持包的相关信息,如果后续文件需要扩展就在此文件中增加相关的库),到此功能包已经创建完毕,后续还需要修改CMakeLists.txt更新我们的编译规则,但在此之前我们需要新建一个cpp源码。
cd ~/catkin_ws/src/package1/src
touch pub_node_test.cpp进入~/catkin_ws/src/package1/src文件夹,使用touch命令创建一个cpp文件,在cpp文件中输入以下内容。
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc,char **argv)
{ros::init(argc,argv,"talker"); //初始化ros::NodeHandle n; //创建句柄ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter",1000); //设定话题名称为chatter,并且缓存队列长度为1000,用于平衡硬件发送速度ros::Rate loop_rate(10); //设置发送波特率为10HZ,与后面的loop_rate.sleep();相互呼应,如果下一帧信息不满足频率要求系统则会延时int count = 0; while(ros::ok()){std_msgs::String msg;std::stringstream ss;ss<<"first example!"<<count;msg.data = ss.str();ROS_INFO("%s",msg.data.c_str());chatter_pub.publish(msg);ros::spinOnce();loop_rate.sleep();++count;}return 0;
}以上代码创建了一个名为talker的节点,该节点通过"chatter"话题发布消息
然后修改package1功能包中的CMakeList.txt文件.打开CMakeLists.txt文件并在里面输入以下内容。
add_executable(pub_node src/pub_node_test.cpp)
target_link_libraries(pub_node ${catkin_LIBRARIES})这样就可以在devel/lib文件夹下生成名为pub_node的可执行文件了,这两条编译码的一般格式如下:add_executable([可执行文件名] src/[cpp文件名]) target_link_libraries([可执行文件名] ${catkin_LIBRARIES})
回到工作空间下并使用catkin_make编译整个工作空间
cd ~/catkin_ws
catkin_make打开一个新终端,使用如下命令即可运行刚编译生成的可执行文件
rosrun package1 pub_node显示界面如下:
 工作空间及消息创建成功!使用rostopic list可以看到会出现一个新的名为chatter的话题。
工作空间及消息创建成功!使用rostopic list可以看到会出现一个新的名为chatter的话题。
相关文章:
[ros][ubuntu]ros在ubuntu18.04上工作空间创建和发布一个话题
构建catkin工作空间 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace cd ~/catkin_ws/ catkin_make 配置环境变量 echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc 检查环境变量 echo $ROS_PACKAGE_PATH…...

我的区块链笔记
区块链 中心化的账本,个人节点和中心节点的地位不对等,中心节点说了算。去中心化,个人节点就是公平的,根据一套规则,叫做公比机制。 区块链的本质,就是数据存储方式 区块链使用密码学算法产生的区块&…...

Spring事务(ACID特性、隔离级别、传播机制、失效场景)
一、事务的ACID特性 原子性(Atomicity) 原子性是指事务是一个不可分割的工作单位,事务中的操作要么都发生,要么都不发生。一致性(Consistency) 事务前后数据的完整性必须保持一致。隔离性(Isola…...

机器学习笔记之最优化理论与方法(六)无约束优化问题——最优性条件
机器学习笔记之最优化理论与方法——无约束优化问题[最优性条件] 引言无约束优化问题无约束优化问题最优解的定义 无约束优化问题的最优性条件无约束优化问题的充要条件无约束优化问题的必要条件无约束优化问题的充分条件 引言 本节将介绍无约束优化问题,主要介绍无…...

E5061B/是德科技keysight E5061B网络分析仪
181/2461/8938产品概述 是德科技E5061B(安捷伦)网络分析仪在从5 Hz到3 GHz的宽频率范围内提供通用的高性能网络分析。E5061B提供ENA系列常见的出色RF性能,还提供全面的LF(低频)网络测量能力;包括内置1 Mohm输入的增益相位测试端口。E5061B从低频到高频的…...
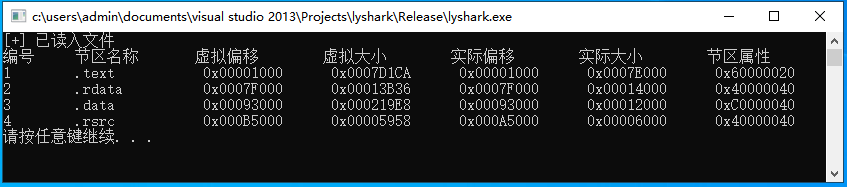
2.4 PE结构:节表详细解析
节表(Section Table)是Windows PE/COFF格式的可执行文件中一个非常重要的数据结构,它记录了各个代码段、数据段、资源段、重定向表等在文件中的位置和大小信息,是操作系统加载文件时根据节表来进行各个段的映射和初始化的重要依据…...
Vue2项目练手——通用后台管理项目第五节
Vue2项目练手——通用后台管理项目 首页组件布局面包屑&tag面包屑使用组件使用vuex存储面包屑数据src/store/tab.jssrc/components/CommonAside.vuesrc/components/CommonHeader.vue tag使用组件文件目录CommonTag.vueMain.vuetabs.js 用户管理页新增功能使用的组件页面布局…...

软件工程学术顶会——ESEC/FSE 2022 议题(网络安全方向)清单、摘要与总结
总结 本次会议中网络安全相关议题涵盖区块链、智能合约、符号执行、浏览器API模糊测试等不同研究领域。 热门研究方向: 1. 基于深度学习的漏洞检测与修复 2. 基于AI的自动漏洞修复 3. 模糊测试与漏洞发现 冷门研究方向: 1. 多语言代码的漏洞分析 2. 代码审查中的软件安全 3. 浏…...
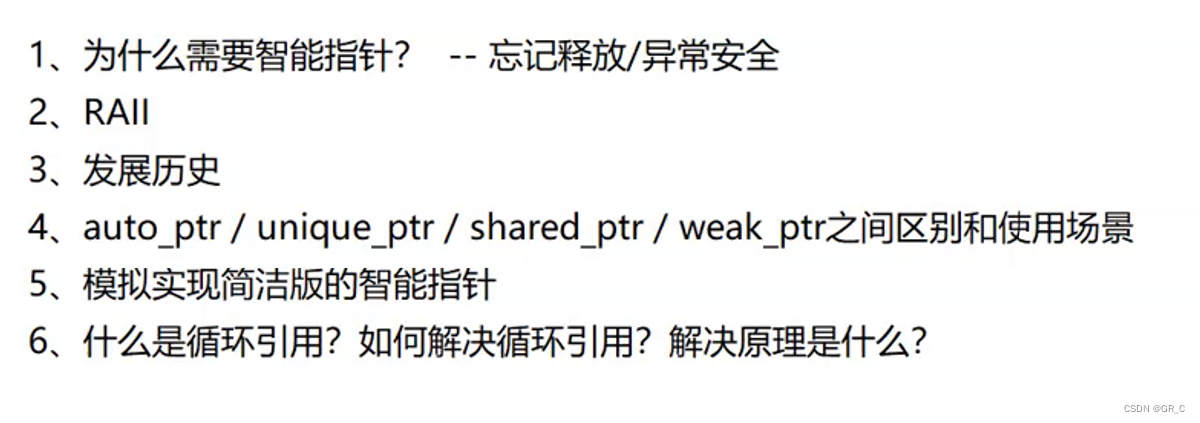
从C语言到C++_36(智能指针RAII)auto_ptr+unique_ptr+shared_ptr+weak_ptr
目录 1. 智能指针的引入_内存泄漏 1.1 内存泄漏 1.2 如何避免内存泄漏 2. RAII思想 2.1 RAII解决异常安全问题 2.2 智能指针原理 3. auto_ptr 3.1 auto_ptr模拟代码 4. unique_ptr 4.1 unique_ptr模拟代码 5. shared_ptr 5.1 shared_ptr模拟代码 5.2 循环引用 6.…...
C++信息学奥赛1187:统计字符数
#include <bits/stdc.h> using namespace std; int main() {string arr;cin >> arr; // 输入一个字符串int n, a, max; // 定义变量n, a, maxchar ArrMax; // 定义字符变量ArrMaxn arr.length(); // 获取字符串长度max a 0; // 初始化max和a为0// 外层循环&…...
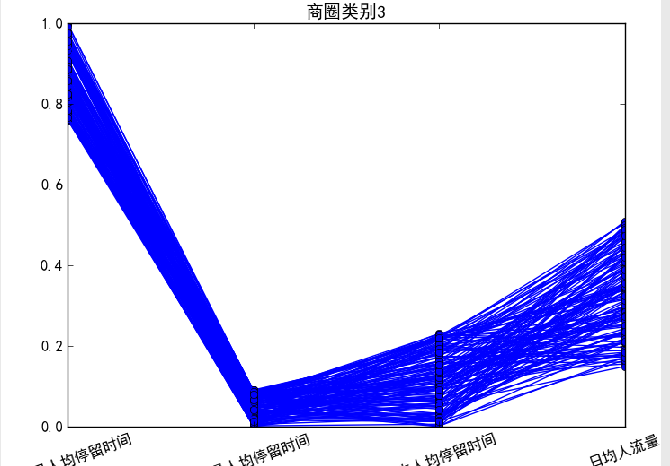
计算机毕设 大数据商城人流数据分析与可视化 - python 大数据分析
文章目录 0 前言课题背景分析方法与过程初步分析:总体流程:1.数据探索分析2.数据预处理3.构建模型 总结 最后 0 前言 🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到…...
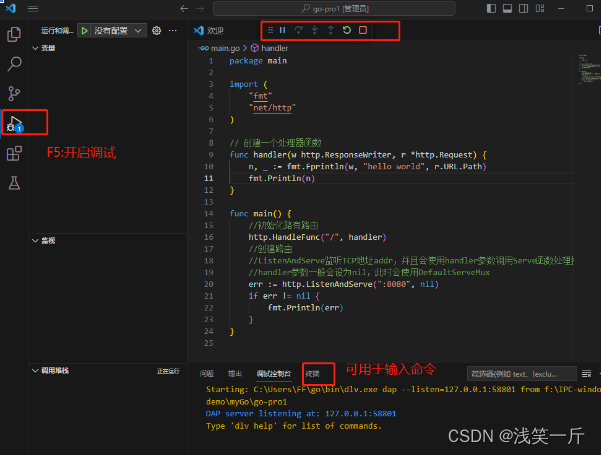
vscode上搭建go开发环境
前言 Go语言介绍: Go语言适合用于开发各种类型的应用程序,包括网络应用、分布式系统、云计算、大数据处理等。由于Go语言具有高效的并发处理能力和内置的网络库,它特别适合构建高并发、高性能的服务器端应用。以下是一些常见的Go语言应用开发…...
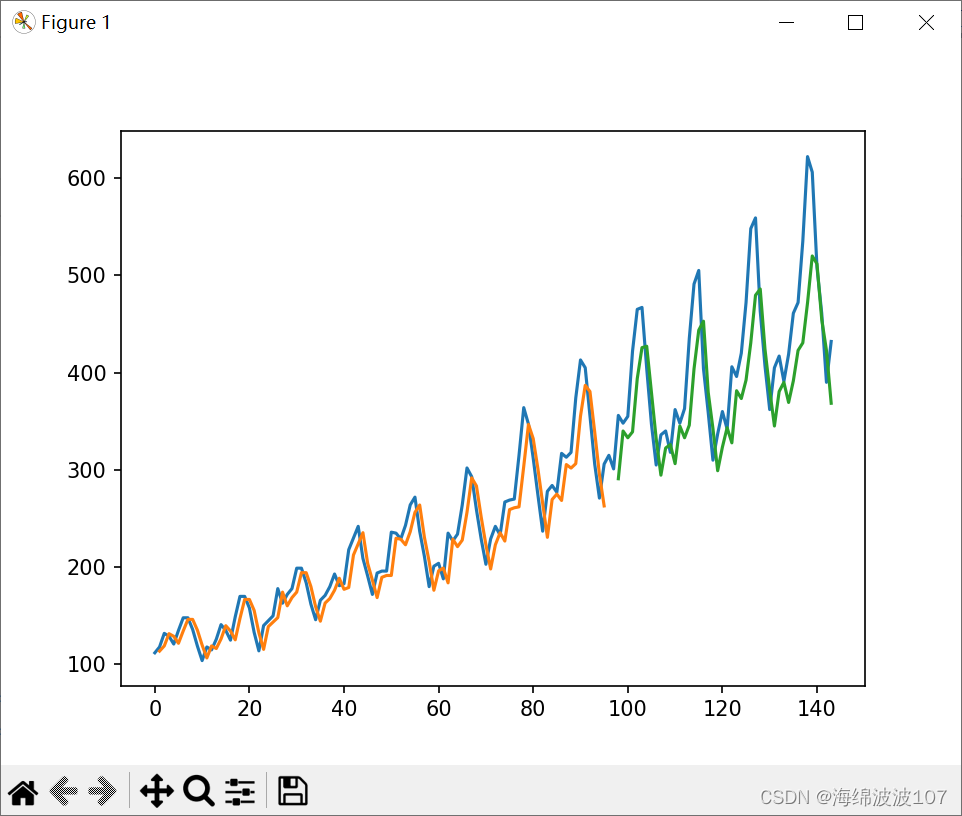
10.(Python数模)(预测模型二)LSTM回归网络(1→1)
LSTM回归网络(1→1) 长短期记忆网络 - 通常只称为“LSTM” - 是一种特殊的RNN,能够学习长期的规律。 它们是由Hochreiter&Schmidhuber(1997)首先提出的,并且在后来的工作中被许多人精炼和推广。…...

mac常见问题(五) Mac 无法开机
在mac的使用过程中难免会碰到这样或者那样的问题,本期为您带来Mac 无法开机怎么进行操作。 1、按下 Mac 上的电源按钮。每台 Mac 电脑都有一个电源按钮,通常标有电源符号 。然后检查有没有通电迹象,例如: 发声,例如由风…...

WebSocket与SSE区别
一,websocket WebSocket是HTML5下一种新的协议(websocket协议本质上是一个基于tcp的协议) 它实现了浏览器与服务器全双工通信,能更好的节省服务器资源和带宽并达到实时通讯的目的 Websocket是一个持久化的协议 websocket的原理 …...
Qt鼠标点击事件处理:显示鼠标点击位置(完整示例)
Qt 入门实战教程(目录) 前驱文章: Qt Creator 创建 Qt 默认窗口程序(推荐) 什么是事件 事件是对各种应用程序需要知道的由应用程序内部或者外部产生的事情或者动作的通称。 事件(event)驱动…...

OpenCV:实现图像的负片
负片 负片是摄影中会经常接触到的一个词语,在最早的胶卷照片冲印中是指经曝光和显影加工后得到的影像。负片操作在很多图像处理软件中也叫反色,其明暗与原图像相反,其色彩则为原图像的补色。例如,颜色值A与颜色值B互为补色&#…...

HZOJ#237. 递归实现排列型枚举
题目描述 从 1−n这 n个整数排成一排并打乱次序,按字典序输出所有可能的选择方案。 输入 输入一个整数 n。(1≤n≤8) 输出 每行一组方案,每组方案中两个数之间用空格分隔。 注意每行最后一个数后没有空格。 样例…...

C++ PIMPL 编程技巧
C PIMPL 编程技巧 文章目录 C PIMPL 编程技巧什么是pimpl?pimpl优点举例实现 什么是pimpl? Pimpl (Pointer to Implementation) 是一种常见的 C 设计模式,用于隐藏类的实现细节,从而减少编译依赖和提高编译速度。它的基本思想是将…...

一个通用的EXCEL生成下载方法
Excel是一个Java开发中必须会用到的东西,之前博主也发过一篇关于使用Excel的文章,但是最近工作中,发现了一个更好的使用方法,所以,就对之前的博客进行总结,然后就有了这篇新的,万能通用的方法说…...

Box64终极指南:如何在ARM设备上轻松运行x86程序?三个简单步骤解锁无限可能
Box64终极指南:如何在ARM设备上轻松运行x86程序?三个简单步骤解锁无限可能 【免费下载链接】box64 Box64 - Linux Userspace x86_64 Emulator with a twist, targeted at ARM64, RV64 and LoongArch Linux devices 项目地址: https://gitcode.com/gh_m…...

3步掌握StreamCap:开源直播录制工具的终极使用指南
3步掌握StreamCap:开源直播录制工具的终极使用指南 【免费下载链接】StreamCap Multi-Platform Live Stream Automatic Recording Tool | 多平台直播流自动录制客户端 基于FFmpeg 支持监控/定时/转码 项目地址: https://gitcode.com/gh_mirrors/st/StreamCap …...

告别Wi-Fi卡顿!手把手教你读懂802.11ax的BSR机制,优化家庭网络上行体验
告别Wi-Fi卡顿!手把手教你读懂802.11ax的BSR机制,优化家庭网络上行体验 你是否经历过这样的场景:视频会议时画面突然卡成马赛克,游戏团战时操作延迟飙升,或是上传文件进度条像蜗牛爬行?这些恼人的问题往往源…...
)
告别手动!用Windows批处理脚本批量重命名MKV音轨(MkvToolnix v73实战)
告别手动!用Windows批处理脚本批量重命名MKV音轨(MkvToolnix v73实战) 每次整理下载的剧集资源时,最让人头疼的莫过于音轨信息错乱——明明视频是国语配音,音轨标签却显示为日语。手动修改不仅效率低下,还容…...

AI 变频调速水泵智能功率 MOSFET 完整选型方案
2026年,AI技术在智能水务及工业泵控系统深度渗透(如预测性维护、能效优化、智能流量调节),变频器对功率 MOSFET 提出更高要求:高效节能、高可靠性、快速响应。微碧半导体(VBsemi)基于先进的 Tre…...
)
DeepSeek v3.2.1核心模块异常日志分析(生产环境未公开的5个堆栈陷阱)
更多请点击: https://kaifayun.com 第一章:DeepSeek v3.2.1核心模块异常日志分析(生产环境未公开的5个堆栈陷阱) 在高并发场景下,DeepSeek v3.2.1 的 model-router 与 kv-cache-sync 模块频繁触发非预期 panic&#x…...

从宿舍区隔离到无线网配置:手把手教你用Cisco Packet Tracer实现企业级网络策略
企业级网络隔离与无线接入实战:Cisco Packet Tracer全流程配置指南 在数字化转型浪潮中,网络架构设计已成为企业IT基础设施的核心竞争力。想象这样一个场景:某科技园区需要为研发部门、行政部门和访客区域构建差异化的网络访问策略——研发数…...

靖江注册公司需要多少钱?2026最新费用明细与隐形消费避坑指南
对于靖江的传统小微型企业、个体工商户、夫妻店及初创公司而言,注册公司的费用多少、是否存在隐形消费,是创业初期最关心的问题。这类企业大多没有专职会计,社保参保人数通常在3人以下,注册年限多在2年内,资金预算有限…...

[STM32U3] 【STM32U385RG 测评】02+调试串口1输出字符串
一::STM32U385 串口知识分享 通用同步/异步收发器(USART) 这些设备有两个嵌入式通用同步接收器发送器(USART1和USART3)以及两个通用异步接收器发送器(UART4和UART5) 该USART提供了一个灵活的手段来执行全双工数据交换与外部设备需要一个行业标准的NRZ异步串行数据格…...

DS-PAW势函数计算全流程:从自洽到可视化分析
1. 从自洽到势函数:理解材料静电环境的关键一步在材料计算领域,我们常常听到“第一性原理计算”这个词,它意味着从最基本的物理定律出发,不依赖任何经验参数,去预测材料的性质。DS-PAW作为一款国产的平面波密度泛函理论…...