强化学习算法总结 2
强化学习算法总结 2
4.动态规划
待解决问题分解成若干个子问题,先求解子问题,然后得到目标问题的解
需要知道整个状态转移函数和价值函数,状态空间离散且有限
- 策略迭代:
- 策略评估:贝尔曼期望方程来得到一个策略的 V ( s ) V(s) V(s)
- 策略提升:
- 价值迭代
4.1 策略迭代算法
- 策略评估
V ( S ) = ∑ a π ( a ∣ s ) Q ( s , a ) = ∑ a π ( a ∣ s ) ( r ( a , s ) + γ ∑ s P ( s ′ ∣ s , a ) V π ( S ′ ) ) V(S) = \sum_a \pi(a|s)Q(s,a) = \sum_a \pi(a|s)(r(a,s)+ \gamma\sum_s P(s'|s,a)V^\pi(S')) V(S)=a∑π(a∣s)Q(s,a)=a∑π(a∣s)(r(a,s)+γs∑P(s′∣s,a)Vπ(S′))
知道状态转移函数和未来状态价值就可以估计当前的状态:我们只需要求解 V ( s ) V(s) V(s)
这里就是利用贝尔曼方程,来不断地更新 V ( s ) V(s) V(s),
V ( S ) k + 1 = ∑ a π ( a ∣ s ) Q ( s , a ) = ∑ a π ( a ∣ s ) ( r ( a , s ) + γ ∑ s P ( s ′ ∣ s , a ) V k ( S ′ ) ) V(S)^{k+1} = \sum_a \pi(a|s)Q(s,a) = \sum_a \pi(a|s)(r(a,s)+ \gamma\sum_s P(s'|s,a)V^k(S')) V(S)k+1=a∑π(a∣s)Q(s,a)=a∑π(a∣s)(r(a,s)+γs∑P(s′∣s,a)Vk(S′))
-
策略提升
只要当前状态下的策略的得到的状态动作函数比 V ( S ) V(S) V(S)高一些
π ′ ( s ) = a r g m a x a Q π ( s , a ) \pi'(s) = argmax_aQ^\pi(s,a) π′(s)=argmaxaQπ(s,a) -
策略迭代
π 0 策略评估 V π 0 ( S )策略提升 π 1 \pi^0 策略评估 V\pi_0(S)策略提升 \pi^1 π0策略评估Vπ0(S)策略提升π1
- 代码
- 策略评估
w h i l e max > θ d o : m a x = 0 f o r s i n r a n g e ( S ) : v = V ( s ) (所有 Q ( s , a )求和 ) V ( S ) = ( b e l l m a n f u c t i o n ) m a x = m a x ( m a x , V ( s ) − v ) while \ \max \ >\theta \ do: \\ \ max = 0 \\ \ for \ s \ in \ range(S):\\ \ v = V(s)(所有Q(s,a)求和)\\ \ V(S) = (bellman fuction)\\ \ max = max(max,V(s) - v) while max >θ do: max=0 for s in range(S): v=V(s)(所有Q(s,a)求和) V(S)=(bellmanfuction) max=max(max,V(s)−v)
* 策略提升
f o r s i n S : π ( s ) = a r g m a x ( Q ( s , a ) ) for\ s\ in\ S:\\ \pi (s) = argmax(Q(s,a)) for s in S:π(s)=argmax(Q(s,a))
4.2 价值迭代算法
V k + 1 ( s ) = m a x a { r ( s , a ) + γ ∑ s P V k } V^{k+1}(s) = max_a\{ r(s,a)+\gamma\sum_sPV^k\} Vk+1(s)=maxa{r(s,a)+γs∑PVk}
可以理解为只执行一轮的策略迭代算法
5 时序差分算法
在数据分布未知的情况下来对模型进行更新,通过智能体与环境的交互进行学习。无模型的强化学习。
- 在线强化学习:使用当前策略下采样得到的数据进行学习
- 离线强化学习:使用经验回访池
5.1 时序差分
V ( S t ) = V ( s t ) + α [ G t − V ( s t ) ] V(S_t) = V(s_t) +\alpha[G_t - V(s_t)] V(St)=V(st)+α[Gt−V(st)]
G t G_t Gt表示整个序列采集结束之后,得到的回报。而很多时候我们是没有办法
V ( s t ) + = α [ r t + γ V ( s t + 1 ) − V ( s t ) ] V(s_t) += \alpha[r_t + \gamma V(s_{t+1}) -V(s_t) ] V(st)+=α[rt+γV(st+1)−V(st)]
用时序差分法估计到了状态价值函数 V ( s ) V(s) V(s)
5.2 SARSA
Q ( s , a ) + = α [ r ( s , a ) + γ Q ( s , a ) − Q ( s , a ) ] Q(s,a) += \alpha[r(s,a) + \gamma Q(s,a) - Q(s,a)] Q(s,a)+=α[r(s,a)+γQ(s,a)−Q(s,a)]
$$
\begin{equation}
\pi(a|s)=\left{
\begin{aligned}
argmax(Q(s,a))& \ & if \ prob < \ 1- \epsilon \
random & \ & \
\end{aligned}
\right.
\end{equation}
$$
5.3 多步Sarsa
MC方法是无偏估计但是方差比较大
TD 是有偏估计,因为每一个对下一个状态的价值都是估计的
Q ( s t , a t ) + = α [ r t + γ Q ( s t + 1 ) + γ 2 Q ( s t + 2 ) + γ 3 Q ( s t + 3 ) . . . − Q ( s , a ) ] Q(s_t,a_t)+= \alpha[ r_t + \gamma Q(s_{t+1}) + \gamma^2 Q(s_{t+2})+ \gamma^3 Q(s_{t+3})... -Q(s,a) ] Q(st,at)+=α[rt+γQ(st+1)+γ2Q(st+2)+γ3Q(st+3)...−Q(s,a)]
代码实现上,是前几次不执行只是进行数据的收集,第n次开始进行多步Sarsa
5.4 Q-learning
Q ( s , a ) + = α [ r ( s , a ) + γ m a x a Q ( s , a ) − Q ( s , a ) ] Q(s,a) += \alpha[r(s,a) + \gamma max_aQ(s,a) - Q(s,a)] Q(s,a)+=α[r(s,a)+γmaxaQ(s,a)−Q(s,a)]
Q-learning的时序差分算法在算下一个状态的Q的时候会取最大的那个
Sarsa会先 ϵ − g r e e d y \epsilon -greedy ϵ−greedy 选择s,a然后计算TD_error,然后估计Q(s’,a’)(比如放在环境中跑一下)
Q-learning next_s和a之后,会找到最大的Q(s’,a’),不依赖于 ϵ − g r e e d y \epsilon -greedy ϵ−greedy 的a
-
在线策略算法和离线策略算法
在线策略算法:行为策略(采样数据的策略)和 目标策略(用于更新的策略)是同一个策略
离线策略算法:行为策略和目标策略并不是同一个策略
7 DQN算法
Q网络的损失函数
w ∗ = a r g m i n w 1 2 N ∑ i = 1 N [ r i + γ m a x i Q w ( s i ′ , a ′ ) − Q w ( s i , a i ) ] w^* = argmin_w \frac{1}{2N}\sum_{i=1}^N[r_i+\gamma max_i Q_w(s'_i,a') - Q_w(s_i,a_i)] w∗=argminw2N1i=1∑N[ri+γmaxiQw(si′,a′)−Qw(si,ai)]
-
经验回放
制作一个数据回放缓冲区,每次环境中得到的<s,a,r,s’>都进行存放
-
目标网络
采用TD_error作为我们的误差,但是包含着网络的输出,所以在更新网络参数的时候,目标也在不断地更新
因为优化目标是让
Q → r + γ m a x Q ( s ′ + a ′ ) Q \rightarrow r+\gamma max Q(s'+a') Q→r+γmaxQ(s′+a′)
相关文章:

强化学习算法总结 2
强化学习算法总结 2 4.动态规划 待解决问题分解成若干个子问题,先求解子问题,然后得到目标问题的解 需要知道整个状态转移函数和价值函数,状态空间离散且有限 策略迭代: 策略评估:贝尔曼期望方程来得到一个策略的 V ( s ) V(s…...

修改node_modules避免更新覆盖 patch-package
说明:直接修改第三方库的代码,会带来团队协作的问题,使用patch-package生成补丁包 什么是 patch-package? patch-package 是一个基于 Git 的工具,它可以帮助我们对依赖包进行修复补丁。通过创建一个与问题相关的补丁文…...
Elasticsearch安装,Springboot整合Elasticsearch详细教程
Elasticsearch 是一个分布式、RESTful 风格的搜索和数据分析引擎,能够实现近乎实时的搜索。 Elasticsearch官网https://www.elastic.co/cn/ 这篇文章主要简单介绍一下Elasticsearch,Elasticsearch的java API博主也在学习中,文章会持续更新~ …...
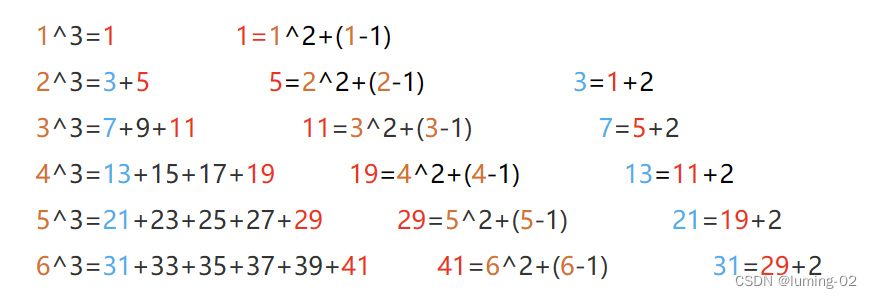
OJ题库:计算日期到天数转换、打印从1到最大的n位数 、尼科彻斯定理
前言:在部分大厂笔试时经常会使用OJ题目,这里对《华为机试》和《剑指offer》中的部分题目进行思路分析和讲解,希望对各位读者有所帮助。 题目来自牛客网,欢迎各位积极挑战: HJ73:计算日期到天数转换_牛客网 JZ17:打印…...
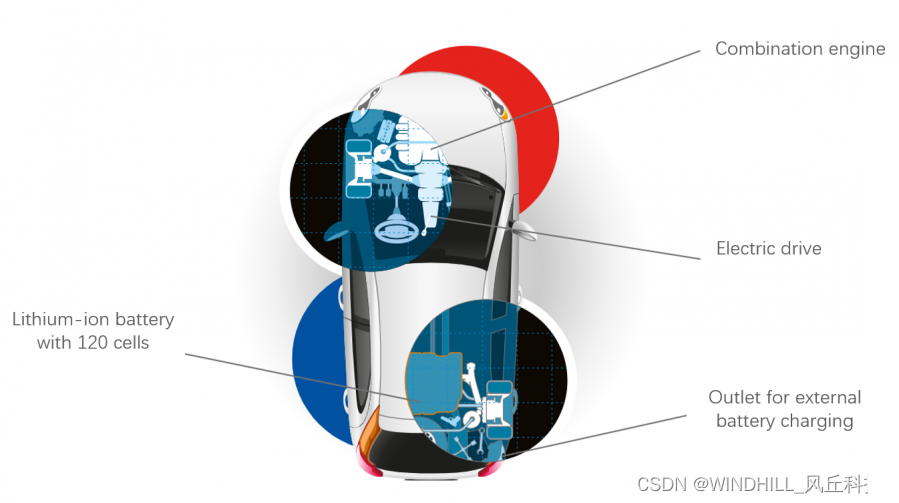
混合动力汽车耐久测试
一 背景 整车厂可通过发动机和电机驱动的结合为多款车型提供混合动力驱动技术。汽车集成电机驱动可大大减少二氧化碳的排放,不仅如此,全电动驱动或混合动力驱动的汽车还将使用户体验到更好的驾驶感受,且这种汽车可通过电动机来实现更快的加速…...
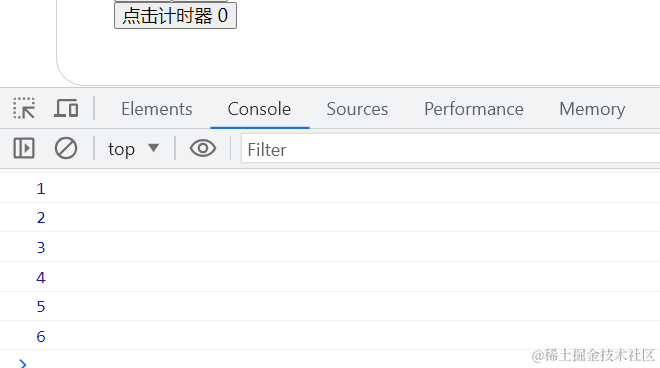
useRef 定义的 ref 在控制台可以打印但是页面不生效?
useRef 是一个 React Hook,它能让你引用一个不需要渲染的值。 点击计时器 点击按钮后在控制台可以打印但是页面不生效。 useRef 返回的值在函数组件中不会自动触发重新渲染,所以控制台可以显示变化而按钮上无法显示 ref.current的变化。 import { use…...
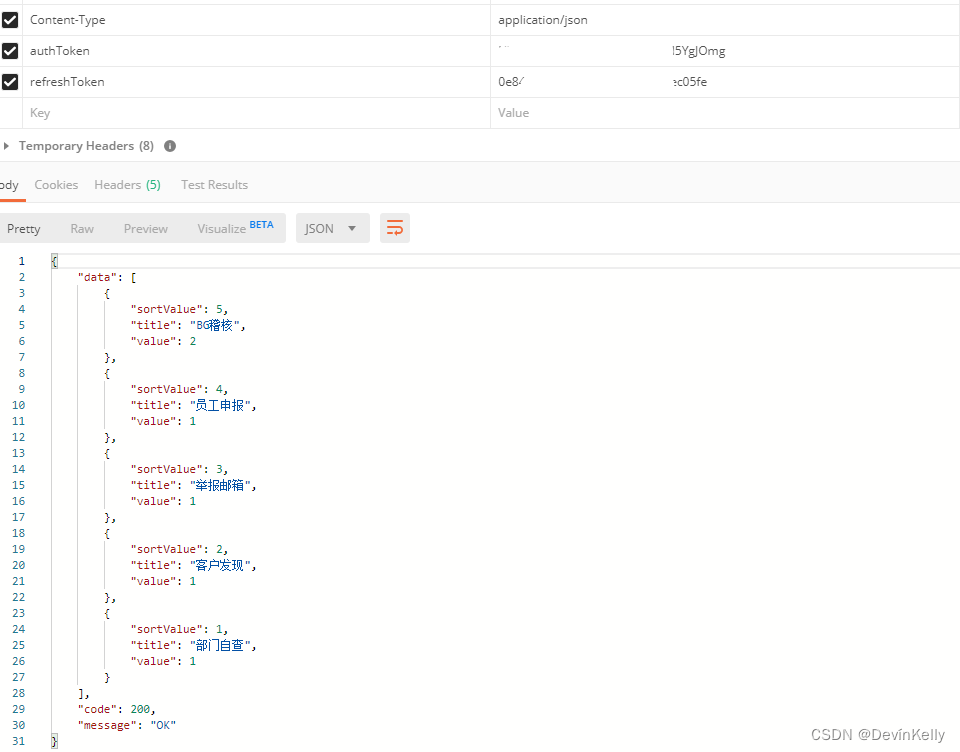
【Java 动态数据统计图】动态数据统计思路案例(动态,排序,动态数组(重点推荐))七(129)
需求:前端根据后端的返回数据:画统计图; 说明: 1.X轴为地域,Y轴为地域出现的次数; 2. 动态展示(有地域展示,没有不展示,且高低排序) Demo案例: …...
Cell Reports | 揭开METTL14在介导m6A修饰中的神秘面纱
m6A被认为是最丰富的mRNA修饰,广泛分布在大多数真核生物中,包括哺乳动物、植物、昆虫、酵母和某些病毒。m6A修饰的沉积和去除之间的动态平衡对于正常的生物过程和发育至关重要,如失调通常与癌症等疾病有关。m6A修饰由m6A甲基转移酶复合物&…...

297. 二叉树的序列化与反序列化
题目描述 序列化是将一个数据结构或者对象转换为连续的比特位的操作,进而可以将转换后的数据存储在一个文件或者内存中,同时也可以通过网络传输到另一个计算机环境,采取相反方式重构得到原数据。 请设计一个算法来实现二叉树的序列化与反序…...
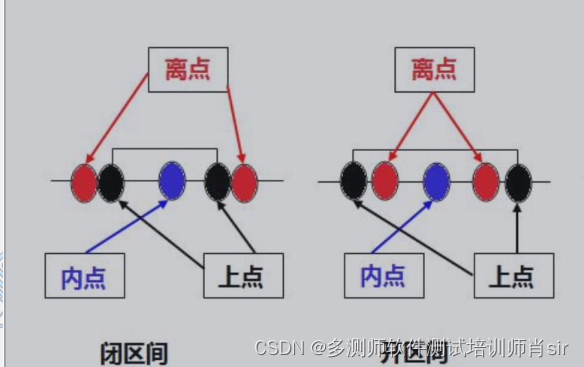
肖sir__设计测试用例方法之边界值03_(黑盒测试)
设计测试用例方法之边界值 边界点定义 上点:边界上的点 离点:离上点最近的点(即上点左右两边最邻近的点) 内点:在域范围内的点 案例:qq号:5-12位 闭区间: 离点:5 位 &…...

功能测试常用的测试用例大全
登录、添加、删除、查询模块是我们经常遇到的,这些模块的测试点该如何考虑 1)登录 ① 用户名和密码都符合要求(格式上的要求) ② 用户名和密码都不符合要求(格式上的要求) ③ 用户名符合要求,密码不符合要求(格式上的要求) ④ 密码符合要求,…...

css利用flex分配剩余高度出现子组件溢出问题
1.利用flex分配剩余高度/宽度 情景:父组件高度一定,子组件中,其他子组件高度固定,一个子组件高度不确定(页面滚动列表) .father{display: flex;flex-direction: column;.son1{height: 200px;}.son2{//或 …...
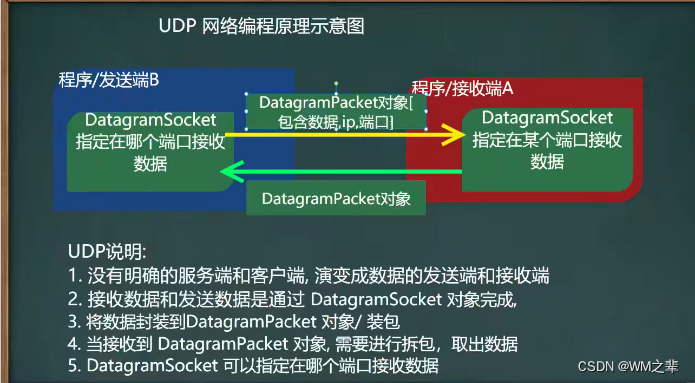
Java中的网络编程------基于Socket的TCP编程和基于UDP的网络编程,netstat指令
Socket 在Java中,Socket是一种用于网络通信的编程接口,它允许不同计算机之间的程序进行数据交换和通信。Socket使得网络应用程序能够通过TCP或UDP协议在不同主机之间建立连接、发送数据和接收数据。以下是Socket的基本介绍: Socket类型&…...

【【STM32-29正点原子版本串口发送传输实验】
STM32-29正点原子版本串口发送传输实验 通过串口接收或发送一个字符 例程目的 开发板上我们接入的是实现异步通信的UART接口 USB转串口原理图 我们一步步分析 PA9是串口1 的发送引脚 PA10是串口1 的接受引脚 。因为我们现在只是用到异步收发器功能,所以我们现…...

【面试题精讲】什么是websocket?如何与前端通信?
有的时候博客内容会有变动,首发博客是最新的,其他博客地址可能会未同步,认准https://blog.zysicyj.top 首发博客地址 系列文章地址 什么是WebSocket? WebSocket是一种在Web应用程序中实现双向通信的协议。它允许在客户端和服务器之间建立持久…...
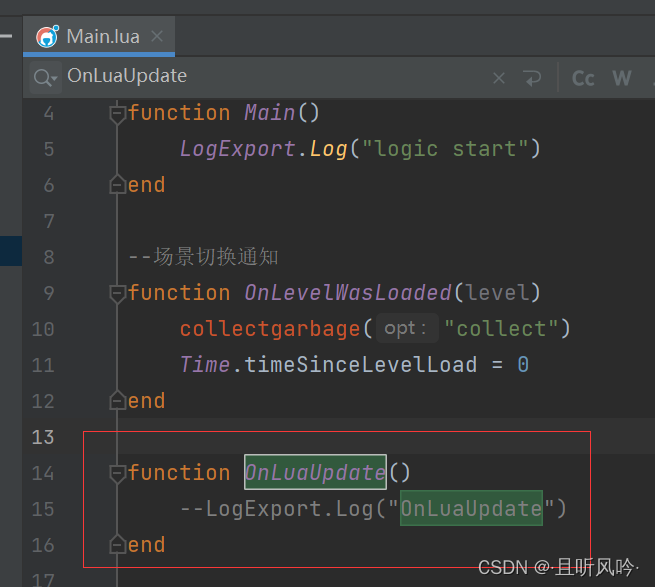
unity tolua热更新框架教程(2)
Lua启动流程 增加脚本luamain,继承luaclient 建立第一个场景GameMain,在对象GameMain挂载脚本LuaMain,启动场景 看到打印,lua被成功加载 lua入口及调用堆栈 这里会执行main.lua文件的main函数 C#接口导出 在此处配置C#导出的代码 …...
【0904作业】QT 完成登陆界面跳转到聊天室+完成学生管理系统的查找和删除功能
一、完成登陆界面跳转到聊天室 1> 项目结构 2> 源码 ① .pro ②main #include "mywnd.h" #include"chatCli.h" #include <QApplication>int main(int argc, char *argv[]) {QApplication a(argc, argv);MyWnd w;w.show();Form f;QObject::co…...

ceph源码阅读 buffer
ceph::buffer是ceph非常底层的实现,负责管理ceph的内存。ceph::buffer的设计较为复杂,但本身没有任何内容,主要包含buffer::list、buffer::ptr、buffer::hash。这三个类都定义在src/include/buffer.h和src/common/http://buffer.cc中。 buffe…...

基本介绍——数据挖掘
1.数据挖掘的定义 数据挖掘是采用数学的、统计的、人工智能和神经网络等领域的科学方法,如记忆推理、聚类分析、关联分析、决策树、神经网络、基因算法等技术,从大量数据中挖掘出隐含的、先前未知的、对决策有潜在价值的关系、模式和趋势,并…...

Navicat连接postgresql时出现‘datlastsysoid does not exist‘报错
当使用 Navicat 连接 PostgreSQL 数据库时出现 ‘datlastsysoid does not exist’ 的错误报错,这可能是由于 Navicat 版本与 PostgreSQL 版本不兼容所致。 这是因为在较新的 PostgreSQL 版本中移除了 ‘datlastsysoid’ 列,但可能较旧版本的 Navicat 尚…...
)
告别手动描图!用AutoCAD Civil 3D 2024快速搞定两期土方横断面对比(附模板)
告别手动描图!用AutoCAD Civil 3D 2024快速搞定两期土方横断面对比(附模板) 在土木工程领域,土方量计算是项目成本控制与进度管理的关键环节。传统CAD手动绘制横断面的方式不仅耗时费力,更难以应对设计变更带来的反复修…...

无参考视频质量评估:AI如何在没有标准答案时评判视频画质
1. 项目概述:当AI成为视频的“质检员”在视频内容爆炸式增长的今天,我们每天都会接触到海量的视频流——从手机随手拍的短视频,到专业制作的影视剧,再到监控摄像头24小时不间断的记录。你有没有想过,这些视频的“画质”…...

设计型vs工程型 宁波景区标识服务商怎么选不踩坑
宁波某4A景区标识升级踩坑案例:3类适配性问题汇总前段时间宁波一家本土4A自然景区完成标识系统升级,不料上线3个月就收到近百条游客投诉,运营方不得不二次招标重做,前后浪费近百万预算。复盘整个项目,核心暴露了3类行业…...

嵌入式GUI性能优化实战:LVGL贝塞尔曲线绘制中的定点数与移位运算避坑指南
嵌入式GUI性能优化实战:LVGL贝塞尔曲线绘制中的定点数与移位运算避坑指南 在嵌入式系统开发中,流畅的图形用户界面(GUI)往往需要面对资源受限的硬件环境。当我们在STM32或ESP32这类微控制器上实现复杂的动画效果时,贝塞尔曲线因其平滑的过渡…...

创业团队如何利用taotoken多模型能力快速进行产品原型验证
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 创业团队如何利用Taotoken多模型能力快速进行产品原型验证 对于资源有限的创业团队而言,开发一个智能对话产品原型时&a…...

企业级部署警告:Perplexity事实核查功能未开启溯源审计模式的5大合规风险,GDPR/CCPA双认证团队紧急通告
更多请点击: https://codechina.net 第一章:Perplexity事实核查功能的核心机制与合规定位 Perplexity 的事实核查功能并非依赖单一模型输出,而是构建于多层验证架构之上:实时检索增强生成(RAG)、跨源可信度…...

3分钟彻底解决Cursor试用限制:设备标识重置技术深度解析
3分钟彻底解决Cursor试用限制:设备标识重置技术深度解析 【免费下载链接】go-cursor-help 解决Cursor在免费订阅期间出现以下提示的问题: Your request has been blocked as our system has detected suspicious activity / Youve reached your trial request limit…...

别再从头训练了!用SAM-Adapter‘轻量化’微调,让你的分割模型快速适配新任务
SAM-Adapter:轻量化微调技术让图像分割模型快速适配新任务 在计算机视觉领域,Segment Anything Model(SAM)的出现无疑掀起了一场分割技术的革命。这个由Meta推出的基础模型,以其惊人的零样本泛化能力震撼了整个行业。然…...

Cadence Allegro焊盘设计避坑指南:从SMD到通孔,这些层设置错了板子就废了
Cadence Allegro焊盘设计避坑指南:从SMD到通孔的关键层设置解析 当一块PCB板从设计文件变成实体电路板时,最令人崩溃的莫过于发现焊盘设计不当导致整批产品无法使用。作为使用Cadence Allegro进行PCB设计的工程师,Padstack Editor中的每个参数…...

瑞萨RH850芯片HSM软件实现:从硬件隔离到安全通信
1. RH850芯片HSM模块的硬件基础 第一次接触瑞萨RH850芯片的HSM(Hardware Security Module)功能时,我被它精妙的硬件设计所震撼。这颗芯片内部其实藏着两个"大脑":主处理器(Host)和专为安全设计的…...