机器人中的数值优化(十三)——QP二次规划
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,下半部分介绍带约束的优化,中间会穿插一些路径规划方面的应用实例
二十、低维度严格凸的QP二次规划
1、低维度严格凸的QP二次规划数学描述
低维度严格凸二次规划,其数学描述如下式所示,其中 M Q M_Q MQ是严格正定的对称矩阵,目标函数是严格凸函数,维度n是低维的
min x ∈ R n 1 2 x T M Q x + c Q T x , s.t. A Q x ≤ b Q \operatorname*{min}_{x\in\mathbb{R}^{n}}\frac{1}{2}x^{\mathrm{T}}M_{\mathcal{Q}}x+c_{\mathcal{Q}}^{\mathrm{T}}x\text{, s.t. }A_{\mathcal{Q}}x\leq b_{\mathcal{Q}} x∈Rnmin21xTMQx+cQTx, s.t. AQx≤bQ
M Q M_Q MQ是严格正定的,因此可以对其进行Cholesky分解,Cholesky 分解是把一个对称正定的矩阵表示成一个下三角矩阵L和其转置的乘积的分解。它要求矩阵的所有特征值必须大于零,故分解的下三角的对角元也是大于零的。
M Q = L Q L Q T M_{\cal Q}=L_{\cal Q}L_{\cal Q}^{\mathrm{T}} MQ=LQLQT
这个QP问题等价于关于y的最小二范数问题:
y = L Q T x + L Q − 1 c Q o r x = L Q − T y − ( L Q L Q T ) − 1 c Q y=L_{\cal Q}^{\mathrm T}x+L_{\cal Q}^{-1}c_{\cal Q}\quad\mathrm{or}\quad x=L_{\cal Q}^{-\mathrm T}y-\left(L_{\cal Q}L_{\cal Q}^{\mathrm T}\right)^{-1}c_{\cal Q} y=LQTx+LQ−1cQorx=LQ−Ty−(LQLQT)−1cQ
我们可以把上面x关于y的表达式代入到目标函数中,整理后得到等价的表达式如下所示:
min y ∈ R n 1 2 y T y , s . t . E y ≤ f \min_{y\in\mathbb{R}^n}\frac12y^\mathrm{T}y,\mathrm{~s.t.~}Ey\leq f y∈Rnmin21yTy, s.t. Ey≤f
其中 E = A Q L Q − T , f = A Q ( L Q L Q T ) − 1 c Q + b Q E=A_{\mathcal{Q}}L_{\mathcal{Q}}^{-\mathrm{T}},f=A_{\mathcal{Q}}\big(L_{\mathcal{Q}}L_{\mathcal{Q}}^{\mathrm{T}}\big)^{-1}c_{\mathcal{Q}}+b_{\mathcal{Q}} E=AQLQ−T,f=AQ(LQLQT)−1cQ+bQ
对上述表达式求解得到最优的y后(在多面体中找一个范数最小的点,也即离原点最近的点),再将得到的y代入到上面x关于y的表达式,即可得到最优的x。
线性不等式约束 E y ≤ f Ey\leq f Ey≤f构成了如下图所示的可行域,在该可行域内找一个使得下式最小的解,即y的二范数的平方的最小的解,也就是可行域中离原点最近的点。
min y ∈ R n 1 2 y T y = 1 2 ∣ ∣ y ∣ ∣ 2 2 \min_{y\in\mathbb{R}^n}\frac12y^\mathrm{T}y=\frac12{||y||_2}^2 y∈Rnmin21yTy=21∣∣y∣∣22

2、一维的QP二次规划
与之前介绍的LP线性规划类似,一维情况下的数学描述及可行域的计算如下图所示,所不同的是,确定了可行域后,QP更容易得到最优解,只需要找到可行域中距离原点最近的点即可,若原点位于可行域左侧,则可行域左端点即为最优解,同理,若原点位于可行域右侧,则可行域右端点即为最优解,若原点位于可行域内部,则原点即为最优解。

3、二维的QP二次规划
与之前介绍的LP线性规划类似,二维情况下的解决思路依然是,在加入新的约束后,若之前的最优解依然在可行域中,则最优解不变,若之前的最优解已经不在可行域中了,则需要将之前的约束边界投影到当前新加入的约束边界上,转化得到一维的可行域,再在这个一维的可行域上寻找新的最优解,与LP不同的是,得到一维的可行域后,只需要将原点也投影到新加入的约束边界上,然后找到一维可行域中与原点的投影点距离最近的点即可


4、更一般的d维QP二次规划
与前文介绍的d维的LP线性规划的主要思想类似,d维的二次规划在当前最优解不满足新加入的约束时,也将其转换成d-1维的二次规划,这跟上面2维二次规划时转换成1维二次规划的思想是相同的,这种思想有点像递归的思想。

上图中给出的伪代码中,输入参数H即不等式约束 a T y < = b a^\mathrm{T}y<=b aTy<=b,也即一系列半空间,如果此时H的维度是一维的,则直接采用上文中介绍的一维情况的解决方法求解,若此时c不是一维的,则初始化一个空集 I I I,可以提前用Fisher-Yates算法对H的序列进行打乱,打乱后进行for循环时,每次依次从H中取一个h,然后判断:
情况1:若当前最优解属于h,则当前最优解满足约束h,不需要计算新的最优解,直接将h添加到集合 I I I中,继续进行下一轮for循环,处理下一个约束h
情况2:若当前的最优解不属于h,则需要计算一个新的最优解x,将已经加入到集合 I I I中的约束投影到约束h的边界上,得到低一个维度的H’,将原点也投影到h上,得到低一个维度的原点v,M是h的一个正交基,然后将低一个维度的H’作为参数递归调用LowDimMinNorm()函数本身进行降维处理,直至降为1维情况。然后就可以得到新的y’,运用关系式 y ← M y ′ + v y\leftarrow My^{\prime}+v y←My′+v得到新的最优解y,此时约束h已经满足,将其添加到集合 I I I中,本轮循环结束,继续进行下一轮for循环,处理下一个约束h。
for循环结束后,即可得到满足所有约束hi的最优解y,然后再带入到x关于y的表达式,得到满足所有约束的最优解x。

在前文介绍的LP线性规划中,把d维的问题转换成d-1维的问题,并逐步转换为1维问题是通过高斯消元法完成的,接下来介绍在QP二次规划中,如何把高维问题转换成低维问题。
在上图中的例子中,之前的约束构成的空间如绿色区域所示,新加入的约束h如图中灰色区域所示,新的最优解 y ∗ y^* y∗必然位于约束h所确定的平面上且位于之前的约束构成的区域的内部,原点o在约束h所确定的平面上的投影点为v,由勾股定理可得他们满足以下表达式
∥ y ∗ − o ∥ 2 = ∥ y ∗ − v ∥ 2 + ∥ v − o ∥ 2 \|y^*-o\|^2= \|y^*-v\|^2+\|v-o\|^2 ∥y∗−o∥2=∥y∗−v∥2+∥v−o∥2
假设,我们已知约束h所确定的平面中以v为原点的一组标准正交基M,然后,约束h所确定的灰色平面中所有点均可表示为该组标准正交基的坐标,因此 y ∗ y^* y∗满足如下表达式,其中 y 1 ′ y_1^{\prime} y1′和 y 2 ′ y_2^{\prime} y2′是 y ∗ − v y^*-v y∗−v在标准正交基下的坐标:
y ∗ − v = y 1 ′ M 1 + y 2 ′ M 2 = M y ′ y^*-v=y_1^{\prime}M_1+y_2^{\prime}M_2=My^{\prime} y∗−v=y1′M1+y2′M2=My′
将上式代入到 ∥ y ∗ − o ∥ 2 = ∥ y ∗ − v ∥ 2 + ∥ v − o ∥ 2 \|y^*-o\|^2= \|y^*-v\|^2+\|v-o\|^2 ∥y∗−o∥2=∥y∗−v∥2+∥v−o∥2中可得以下表达式(因为M是标准正交基,所以 M T M = I M^TM=I MTM=I所以求范数后可以约去 )
∥ M y ′ ∥ 2 + ∥ v − o ∥ 2 = ∥ y ′ ∥ 2 + ∥ v − o ∥ 2 = ∥ y ∗ ∥ 2 \|My'\|^2+\|v-o\|^2=\|y'\|^2+\|v-o\|^2=\|y^*\|^2 ∥My′∥2+∥v−o∥2=∥y′∥2+∥v−o∥2=∥y∗∥2
因为,v-o是常量,所以求最小的y*可以转换为求最小的y’,把一个线性等式约束上的最小范数问题转化为一个无约束的最小范数问题。
接下来看一下,上面提到的点v和标准正交基M如何求,约束h= g T y = f g^Ty=f gTy=f,可知当 y = f g g T g y=\frac{\color{red}{fg}}{\color{red}{g^Tg}} y=gTgfg必然满足该约束,所以v可取为: v = f g g T g v=\frac{\color{red}{fg}}{\color{red}{g^Tg}} v=gTgfg

g是h约束所确定平面的法向量,那么平面的标准正交基均垂直于g,我们可以先构造下图中绿色的这样一组正交基,其某一个维度的模长为||g||,然后再通过旋转把模长为||g||的那个基变得跟g同方向,其他的绿色基,自然也就变成了我们想要的图中黄色的基M。其相关数学表达式如下所示:
u = g − ∥ g ∥ e i u=g-\|g\|e_i u=g−∥g∥ei
H = I d − 2 u u T u T u H=I_d-\frac{2uu^\mathrm{T}}{u^\mathrm{T}u} H=Id−uTu2uuT
先根据g和ei计算出u,再代入上式计算出H(注意这里的H不是约束的意思),然后把H转置一下,得到 H T H^T HT后去掉第i列,就得到我们想要的M了,M中的d-1个列向量是由H中的d-1个行向量构成的

参考资料:
1、数值最优化方法(高立 编著)
2、机器人中的数值优化
相关文章:
机器人中的数值优化(十三)——QP二次规划
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…...
语言深入理解指针(非常详细)(三)
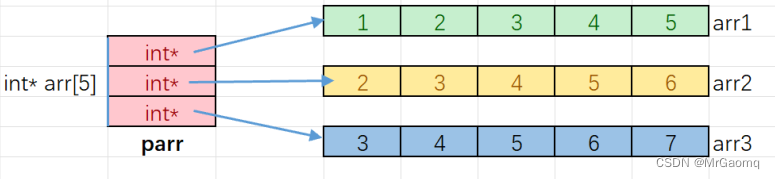
目录 数组名的理解使用指针访问数组 一维数组传参的本质二级指针指针数组指针数组模拟二维数组 数组名的理解 在上⼀个章节我们在使用指针访问数组的内容时,有这样的代码: int arr[10] {1,2,3,4,5,6,7,8,9,10}; int *p &arr[0];这里我们使用 &am…...

实训笔记8.31
实训笔记8.31 8.31笔记一、项目开发流程一共分为七个阶段1.1 数据产生阶段1.2 数据采集存储阶段1.3 数据清洗预处理阶段1.4 数据统计分析阶段1.5 数据迁移导出阶段1.6 数据可视化阶段 二、项目数据清洗预处理的实现2.1 清洗预处理规则2.1.1 数据清洗规则2.1.2 数据预处理规则 2…...

el-table 垂直表头
效果如下: 代码如下: <template><div class"vertical_head"><el-table style"width: 100%" :data"getTblData" :show-header"false"><el-table-columnv-for"(item, index) in getHe…...

B081-Lucene+ElasticSearch
目录 认识全文检索概念lucene原理全文检索的特点常见的全文检索方案 Lucene创建索引导包分析图代码 搜索索引分析图代码 ElasticSearch认识ElasticSearchES与Kibana的安装及使用说明ES相关概念理解和简单增删改查ES查询DSL查询DSL过滤 分词器IK分词器安装测试分词器 文档映射(字…...

机器学习:塑造未来的核心力量
着科技的飞速发展,机器学习已经成为我们生活中不可或缺的一部分。无论是搜索引擎、推荐系统,还是自动驾驶汽车和机器人,都依赖于机器学习算法。本文将探讨机器学习的基本概念、应用领域以及未来发展趋势。 一、机器学习的基本概念 机器学习…...
RK3568-i2c-适配8010rtc时钟芯片
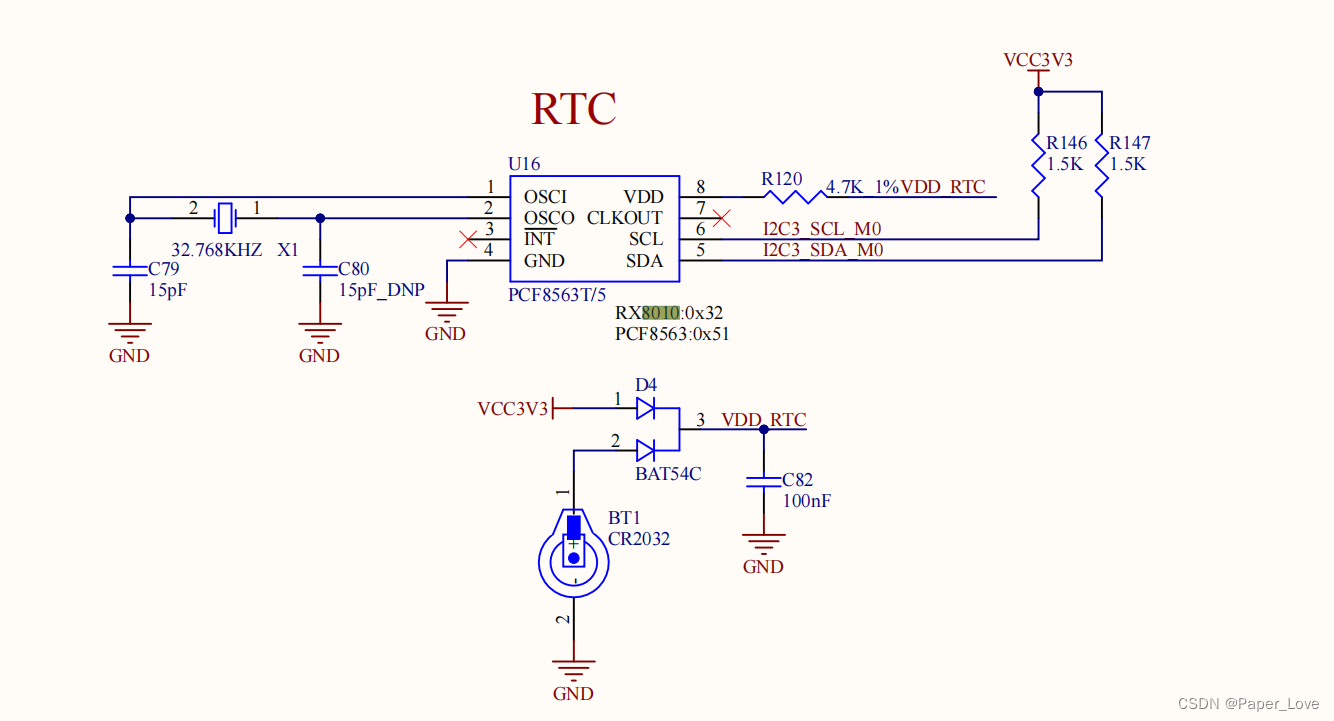
硬件连接 从硬件原理图中可以看出,rtc时钟芯片挂载在i2c3总线上,设备地址需要查看芯片数据手册。编写设备树 &i2c3 {status "okay";rx8010: rx801032 {compatible "epson,rx8010";reg <0x32>;}; };使能驱动 /kernel/…...

Spring Security - 基于内存快速demo
基于内存方式 - 只作学习参考1.引入依赖<dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-thymeleaf</artifactId></dependency>2.login.html、index.html、fail.htmllogin.html:<form method…...

6 | 从文本文件中读取单词并输出不重复的单词列表
Transformation 操作 Transformation 操作是用于从一个 RDD(Resilient Distributed Dataset)创建一个新的 RDD,通常是通过对原始 RDD 的元素进行映射、筛选、分组等操作来实现的。Transformation 操作不会立即执行,而是惰性计算,只有在 Action 操作触发时才会真正执行。以…...
配置)
【微信小程序篇】- 多环境(版本)配置
最近自己在尝试使用AIGC写一个小程序,页面、样式、包括交互函数AIGC都能够帮我完成(不过这里有一点问题AIGC的上下文关联性还是有限制,会经常出现对于需求理解跑偏情况,需要不断的重复强调,并纠正错误,才能得到你想要的…...
)
ssh配置(一、GitLabGitHub)
一. 为什么配置ssh 使用 ssh 克隆项目,更加安全方便。 git clone 项目时一般使用两种协议 https 和 ssh 。 二. 原理的通俗解释 ssh 解决的问题是登录时的用户身份验证问题,默认使用 RSA(也支持其他算法: RSA、DSA、ECDSA、EdD…...

开了抖店后就可以直播带货了吗?想在抖音带货的,建议认真看完!
我是王路飞。 关于抖店和直播带货的关系,其实很多人经常搞不清楚。 不然的话,也不会有这个问题的出现了:开了抖店后就可以直播带货了吗? 在我看来,这个问题很简单,但在不了解抖音电商和直播带货其中门道…...
【深度学习实验】数据可视化
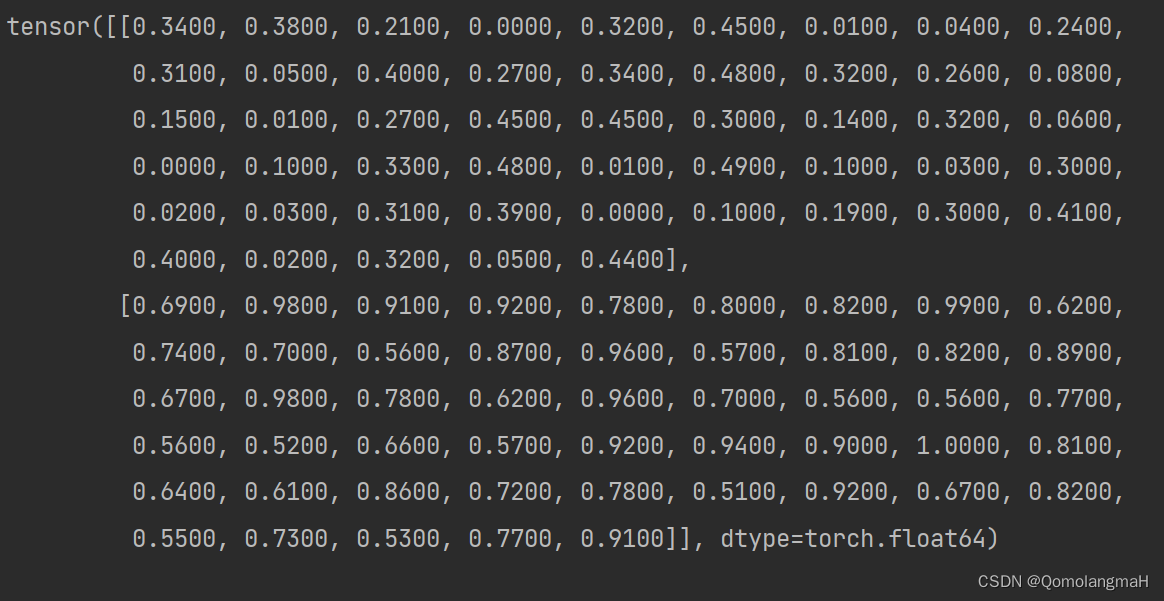
目录 一、实验介绍 二、实验环境 三、实验内容 0. 导入库 1. 归一化处理 归一化 实验内容 2. 绘制归一化数据折线图 报错 解决 3. 计算移动平均值SMA 移动平均值 实验内容 4. 绘制移动平均值折线图 5 .同时绘制两图 6. array转换为tensor张量 7. 打印张量 一、…...

【Golang】函数篇
1、golang函数基本定义与使用 func 函数名 (形参列表) (返回值类型列表) {函数体return 返回值列表 }其中func用于表明这是一个函数,剩下的东西与其他语言的函数基本一致,在定义与使用的时候注意函数名、参数、返回值书写的位置即可。下面使用一个例子…...
在ubuntu上安装ns2和nam(ubuntu16.04)
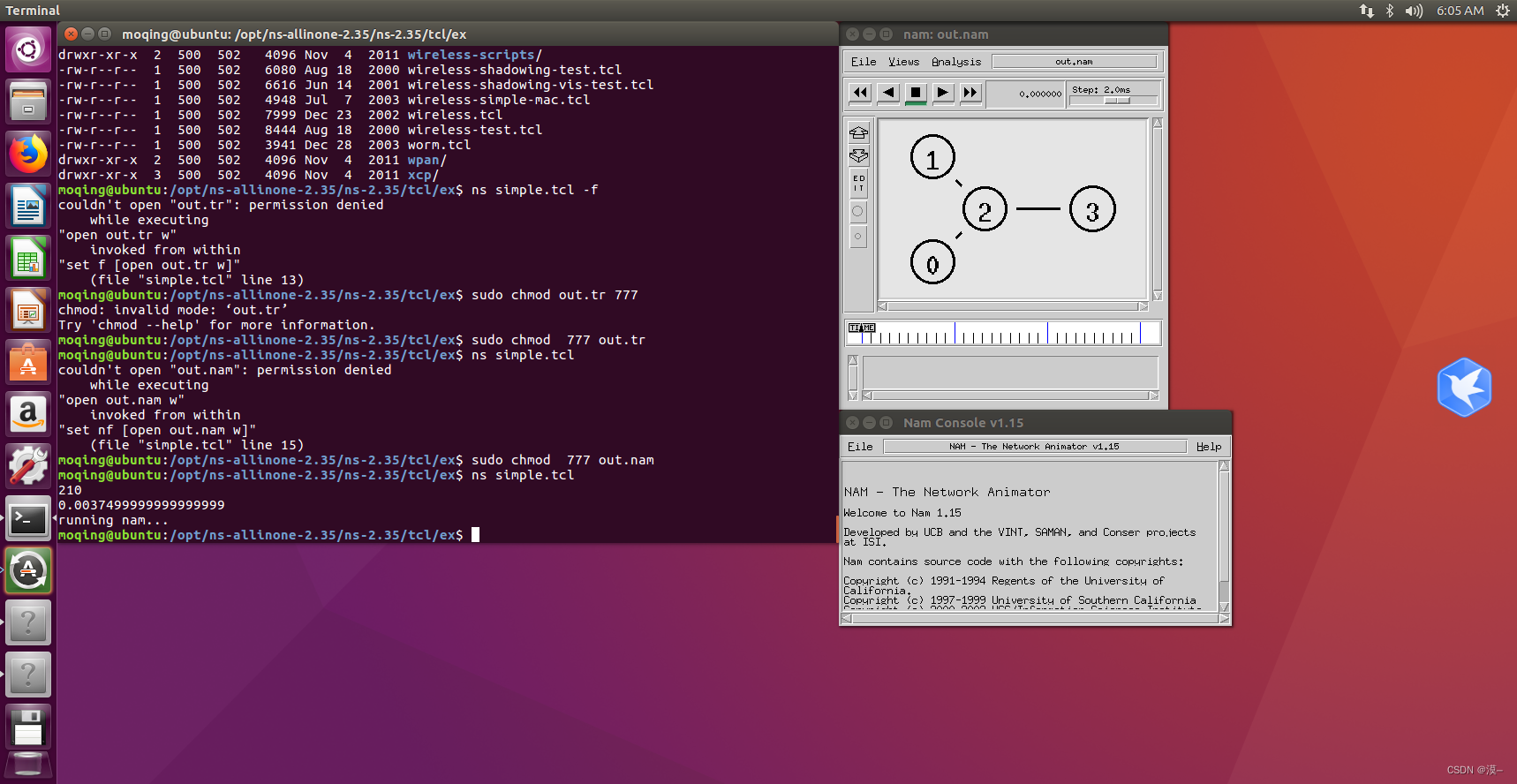
在ubuntu上安装ns2和nam 版本选择安装ns2安装nam 版本选择 首先,版本的合理选择可以让我们避免很多麻烦 经过测试,ubuntu的版本选择为ubuntu16.04,ns2的版本选择为ns-2.35,nam包含于ns2 资源链接(百度网盘) 链接:https://pan.bai…...

SpringCloudAlibaba之Sentinel介绍
文章目录 1 Sentinel1.1 Sentinel简介1.2 核心概念1.2.1 资源1.2.2 规则 1.3 入门Demo1.3.1 引入依赖1.3.2 集成Spring1.3.3 Spring中资源规则 1.4 Sentinel控制台1.5 核心原理1.5.1 NodeSelectorSlot1.5.2 ClusterBuilderSlot1.5.3 LogSlot1.5.4 StatisticSlot1.5.5 Authority…...
苹果微信聊天记录删除了怎么恢复?果粉原来是这样恢复的
粗心大意删除了微信聊天记录?有时候,一些小伙伴可能只是想要删除一部分聊天记录,但是在进行批量删除时,不小心勾选到了很重要的对话,从而导致记录丢失。 如果这时想找回聊天记录该怎么办?微信聊天记录删除…...
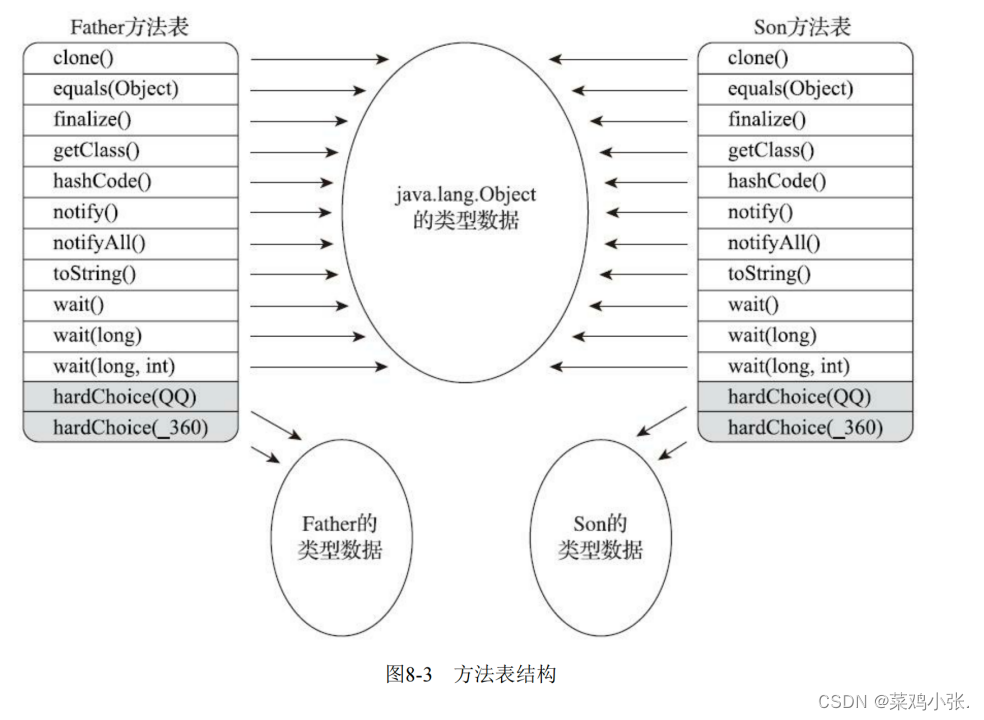
JVM的故事——虚拟机字节码执行引擎
虚拟机字节码执行引擎 文章目录 虚拟机字节码执行引擎一、概述二、运行时栈帧结构三、方法调用 一、概述 执行引擎Java虚拟机的核心组成之一,它是由软件自行实现的,能够执行那些不被硬件直接支持的指令集格式。 对于不同的虚拟机实现,执行引…...
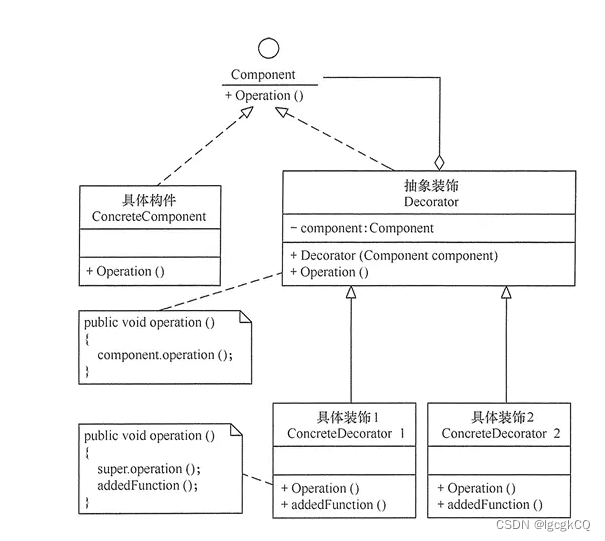
设计模式之适配器与装饰器
目录 适配器模式 简介 角色 使用 优缺点 使用场景 装饰器模式 简介 优缺点 模式结构 使用 使用场景 适配器模式 简介 允许将不兼容的对象包装成一个适配器类,使得其他类可以通过适配器类与原始对象进行交互,从而提高兼容性 角色 目标角色…...
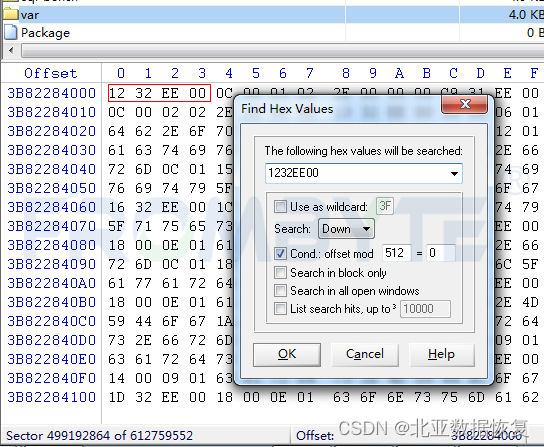
服务器数据恢复- Ext4文件系统分区挂载报错的数据恢复案例
Ext4文件系统相关概念: 块组:Ext4文件系统的空间被划分为若干个块组,每个块组内的结构大致相同。 块组描述符表:每个块组都对应一个块组描述符,这些块组描述符统一放在文件系统的前部,称为块组描述符表。每…...
)
告别命令行恐惧:用FinalShell 4.3.10图形化连接Linux虚拟机(Windows 10环境)
告别命令行恐惧:FinalShell 4.3.10图形化连接Linux虚拟机全指南 对于刚接触Linux系统管理的开发者而言,命令行界面往往像一堵无形的墙。我曾见过不少同事面对闪烁的光标不知所措——直到发现FinalShell这类工具,才真正打开了高效运维的大门。…...

车间管理越管越乱?找准根源+避坑,跳出管理内耗
很多车间管理者都深陷这样的困境:每天忙得脚不沾地,盯进度、查卫生、处理各类现场异常,耗尽心力却收效甚微,车间反而越管越乱——物料堆放杂乱无章、工序衔接频频脱节、员工操作随心所欲、设备故障时有发生,产能上不去…...
】的实战应用与局限)
一文掌握【行为克隆 (Behavior Cloning)】的实战应用与局限
1. 行为克隆是什么?从模仿人类到AI决策 想象一下教小朋友骑自行车的情景。你不会先讲解力学原理,而是亲自示范如何保持平衡、如何踩踏板。孩子通过观察和模仿你的动作,逐渐掌握骑行技巧——这就是行为克隆(Behavior Cloning&#…...
)
手把手教你给M301H-BYT盒子刷当贝纯净桌面(附Hi3798芯片短接点位图)
从零开始:M301H-BYT盒子刷机实战指南 家里的老旧电视盒子用久了总是卡顿、存储不足,还限制应用安装?今天我们就来彻底解决这个问题。本文将手把手教你如何为M301H-BYT盒子刷入当贝纯净桌面系统,让你的老设备重获新生。不同于简单的…...

福特押注五款新车型,含电动车与Bronco,欲重振欧洲市场
福特计划未来三年内在欧洲推出五款全新乘用车,以重振其在欧洲市场日渐式微的品牌形象。这一"福特欧洲乘用车新纪元"计划涵盖一款全新的多能源Bronco SUV、一款小型纯电掀背车、一款纯电SUV,以及两款多能源跨界SUV,所有车型均专为欧…...
)
实测!Gemini+ChatGPT赋能学术写作:我的论文写作SOP(附提示词)
各位同仁好,我是七哥。一个在高校里从事人工智能相关领域研究,钻研用大模型AI实操的学术人。可以和七哥交流学术写作或Gemini、GPT、Claude等大模型学术实操相关问题,多多交流,相互成就,共同进步。 为什么ChatGPT逻辑清晰却写不长?为什么Gemini能深入分析但废话连篇? …...
)
保姆级教程:用YOLOv5+DeepSort从零搭建一个车辆计数测速系统(附完整源码和数据集)
从零构建智能交通分析系统:YOLOv5与DeepSort实战指南 在智能交通管理领域,计算机视觉技术正发挥着越来越重要的作用。本文将带您一步步搭建一个完整的车辆计数与测速系统,结合YOLOv5目标检测和DeepSort多目标跟踪算法,实现从视频流…...
)
深入理解STM32的PWM:从CubeMX配置到用HAL库精准控制舵机角度(以F103为例)
深入理解STM32的PWM:从CubeMX配置到用HAL库精准控制舵机角度(以F103为例) 在机器人控制、自动化设备等需要精确位置反馈的应用场景中,舵机的精准控制往往是项目成败的关键。许多开发者虽然能够通过PWM实现基本的0、90、180三档控制…...

C51外部代码空间读取技术:CBYTE/CWORD宏详解
1. C51外部代码空间读取技术解析在8051单片机开发中,经常需要从外部程序存储器(Code Space)读取数据,这是嵌入式系统开发中的一项基础但关键的操作。许多开发者在使用Keil C51工具链时,会遇到如何正确读取外部程序存储器的问题。本文将深入解…...

B站缓存视频转换神器:3分钟让m4s文件重获新生的终极指南
B站缓存视频转换神器:3分钟让m4s文件重获新生的终极指南 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经为B站缓存视频无法…...