2020 杭电多校第三场 H Triangle Collision(反射套路 + 绕点旋转 + 矢量
2020 杭电多校第三场 H. Triangle Collision(反射套路 + 绕点旋转 + 矢量分解)
大意:给出一个等边三角形 , 以底边中线建立坐标系 , 给出三角形中一点 , 和其初始速度 , 小球在等边三角形中做完全弹性碰撞 , 问其恰好碰撞 k 次的时间。
解法:
trick1: 反射套路
对于这样一个反射套路题 , 如果模拟在一个三角形内模拟碰撞的话 , 显然不现实 ,所以我们可以根据反射原理 , 将路径变成一条直线。这样问题就变成了射线在下图中的交点个数问题。

trick2: 我们不妨先思考水平直线相交个数如何求。假设运动实现为 t 那么显然交点个数就是
a b s ( f l o o r ( y + v y t h ) ) abs(floor(\frac{y+v_yt}{h})) abs(floor(hy+vyt))
对于另外两种直线 , 我们要求相应坐标系下的 y 和 vy
对于 y(标量) 的求法有两种 , 第一种是用点到直线的距离公式 , 但是点到直线距离公式中有除法 , 误差很大 , 所以精度不够。
第二种方法是我们可以把操作转化成绕三角形中心旋转坐标系 , 对应点的坐标也绕中心旋转后即是答案。
trick3:
对于 vy(矢量) , 我们设立好正方向 , 进行矢量分解即可。一定要设立正方向 , 因为矢量是有方向的。
这样就能求得某一时刻 t 穿过点数量 , 二分一下 t 即可。
#include<bits/stdc++.h>
using namespace std;
#define fi first
#define se second
#define IOS std::ios::sync_with_stdio(false),cin.tie(0),cout.tie(0);
#define int long long
const int N = 2e6 + 10;
const int mod = 1e9 + 7;
typedef pair<int,int>PII;//--------------------------------------------------------------
const double eps = 1e-5;
const double pi = acos(-1);
inline double sqr(double x) {return x * x;} //平方
int sign(double x){if(fabs(x) < eps) return 0;if(x > 0) return 1;return -1;
}//符号
struct point{double x , y;point(){}point(double a , double b) : x(a) , y(b){}friend point operator + (const point &a , const point &b){return point(a.x + b.x , a.y + b.y);}friend point operator - (const point &a , const point &b){return point(a.x - b.x , a.y - b.y);}friend bool operator == (const point &a , const point &b){return !sign(a.x - b.x) && !sign(a.y - b.y);}friend point operator * (const point &a , const double &b){return point(a.x * b , a.y * b);}friend point operator * (const double &a , const point &b){return point(a * b.x , a * b.y);}friend point operator / (const point &a , const double &b){return point(a.x / b , a.y / b);}//向量模长 double norm(){ return sqrt(sqr(x) + sqr(y));}
}; //坐标轴绕某点旋转后 , 原坐标轴下的点也会绕这个点旋转
double rotate_point(const point &a , const point &p , double A){double tx = p.x - a.x , ty = p.y - a.y;return a.y + tx * sin(A) + ty * cos(A);
}// p 点 绕 a 点逆时针旋转 A 弧度
//--------------------------------------------------------------int t , k;
double h , x , y , vx , vy , yr , yl;int solve(double st , double v , double t){return abs(floor((st + v * t) / h));
}bool check(double t){int res = 0;res += solve(y , vy , t);//水平res += solve(yr , (vx * sqrt(3) - vy) / 2 , t);res += solve(yl , (-vx * sqrt(3) - vy) / 2 , t);return res >= k;
}signed main(){cout << fixed << setprecision(10);cin >> t;while(t --){cin >> h >> x >> y >> vx >> vy >> k;h = h * sqrt(3) / 2;yr = rotate_point(point{0 , h / 3} , point{x , y} , pi / 3 * 2);yl = rotate_point(point{0 , h / 3} , point{x , y} , pi / 3 * 4);double l = 0 , r = 1e9 , mid = 0;while(r - l > eps){mid = (l + r) / 2;if(check(mid)) r = mid;else l = mid;}cout << mid << "\n"; }return 0;
}
//freopen("文件名.in","r",stdin);
//freopen("文件名.out","w",stdout);
相关文章:
2020 杭电多校第三场 H Triangle Collision(反射套路 + 绕点旋转 + 矢量
2020 杭电多校第三场 H. Triangle Collision(反射套路 绕点旋转 矢量分解) 大意:给出一个等边三角形 , 以底边中线建立坐标系 , 给出三角形中一点 , 和其初始速度 , 小球在等边三角形中做完全弹性碰撞 , …...
Servlet属性、监听者和会话
没有servlet能单独存在。在当前的现代Web应用中,许多组件都是在一起协作共同完成一个目标。怎么让这些组件共享信息?如何隐藏信息?怎样让信息做到线程安全? 1 属性和监听者 1.1 初始化 容器初始化一个servlet时,会为…...

Gin学习记录2——路由
路由 一. 常规路由二. 动态路由三. 带参数的路由3.1 GET3.2 POST3.3 绑定 四. 简单的路由组五. 文件分组 一. 常规路由 package mainimport ("net/http""github.com/gin-gonic/gin" )func index(ctx *gin.Context) {ctx.String(http.StatusOK, "Hell…...
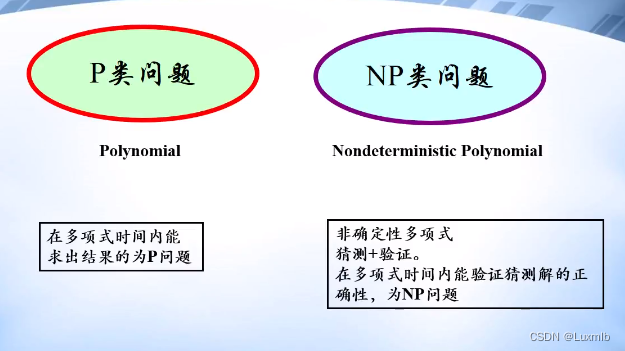
《计算机算法设计与分析》第一章:算法概述
第一章 算法概述 1.1 算法复杂性分析 公共标准:渐进时间复杂度 (1)大O表示法: 例如: 大O表示法和前面的最坏时间复杂度的区别在于:大O表示法表示的更为简洁, 而最坏时间复杂度相对就比较繁琐&am…...

华为数通方向HCIP-DataCom H12-821题库(单选题:201-220)
第201题 BGP 协议用 beer default-route-advertise 命令来给邻居发布缺省路由,那么以下关于本地 BGP 路由表变化的描述,正确的是哪一项? A、在本地 BGP 路由表中生成一条活跃的缺省路由并下发给路由表 B、在本地 BGP 路由表中生成一条不活跃的缺省路由&…...
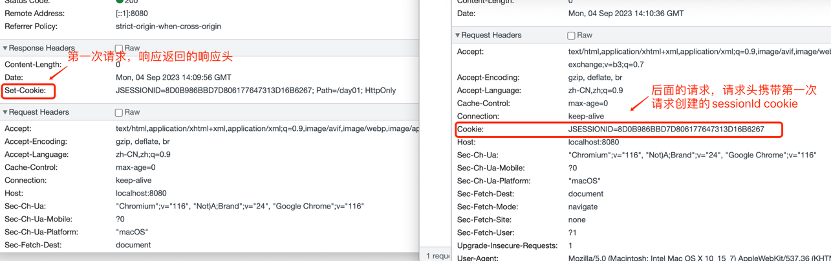
使用ELK收集解析nginx日志和kibana可视化仪表盘
文章目录 ELK生产环境配置filebeat 配置logstash 配置 kibana仪表盘配置配置nginx转发ES和kibanaELK设置账号和密码 ELK生产环境配置 ELK收集nginx日志有多种方案,一般比较常见的做法是在生产环境服务器搭建filebeat 收集nginx的文件日志并写入到队列(k…...
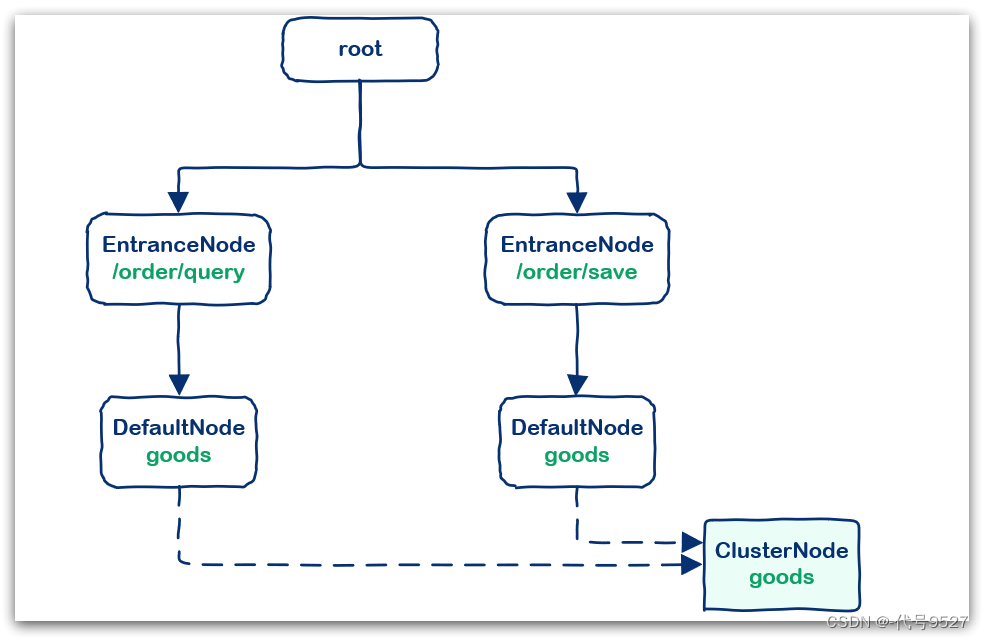
【Sentinel】ProcessorSlotChain处理器插槽链与Node
文章目录 1、Sentinel的基本概念2、ProcessorSlotChain3、Node 1、Sentinel的基本概念 Sentinel实现限流、隔离、降级、熔断等功能,本质要做的就是两件事情: 统计数据:统计某个资源的访问数据(QPS、RT等信息)规则判断…...
数据库管理系统(DBMS)的事务四大特性(ACID)以及事务的四种隔离级别
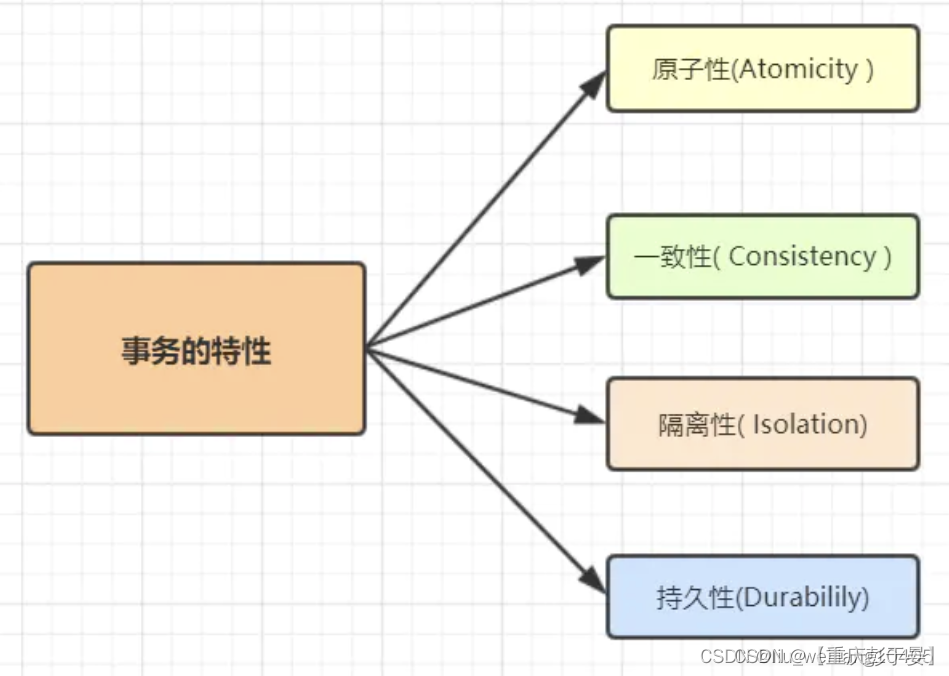
一、什么是ACID? ACID是原子性(Atomicity)、一致性(Consistency)、隔离性(Isolation)和持久性(Durability) 的缩写,是在可靠数据库管理系统(DBMS&…...
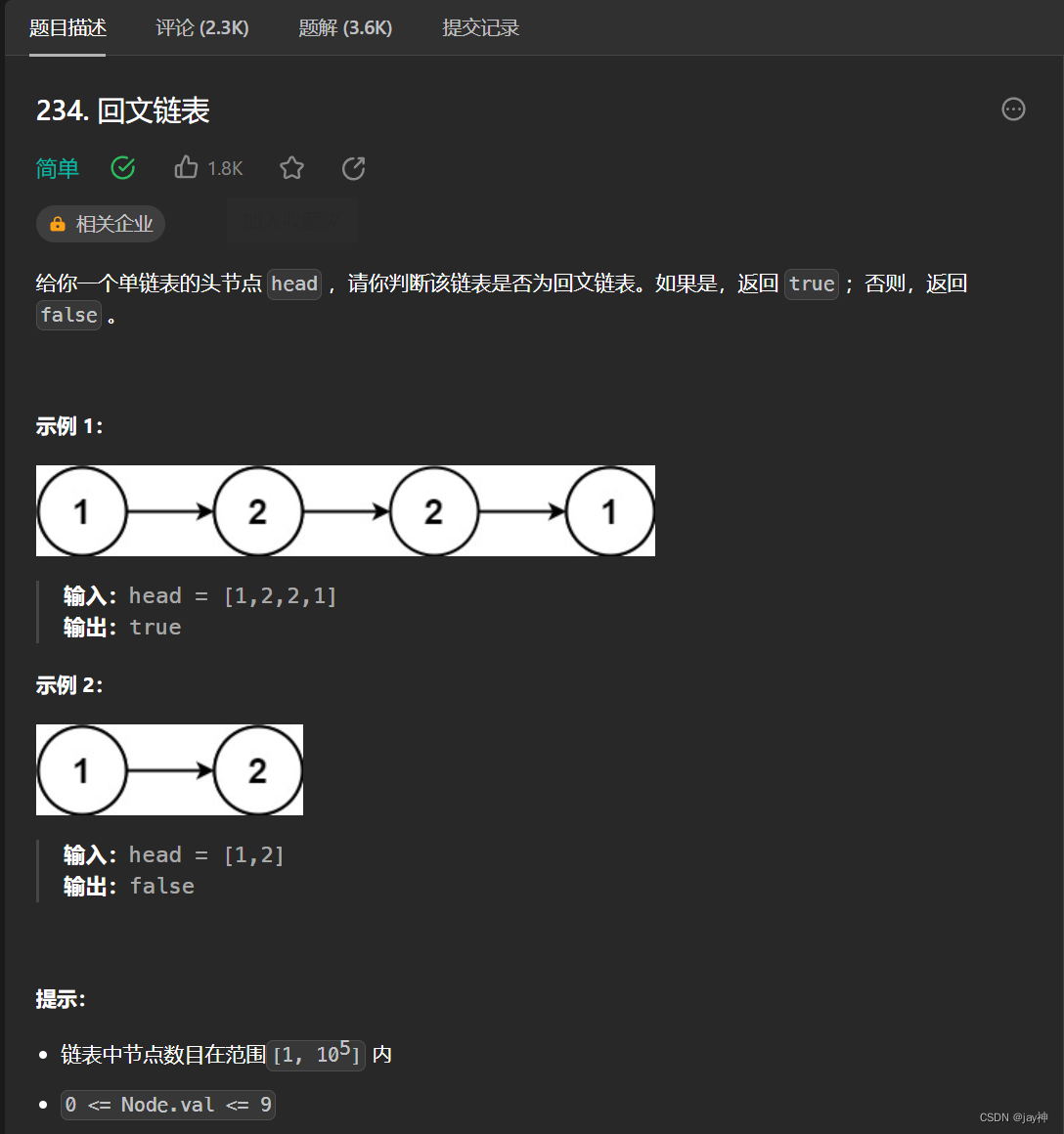
leetcode 234. 回文链表
2023.9.5 本题先将链表的节点值移到数组中,再用双指针去判断该数组是否为回文的即可。 代码如下: /*** Definition for singly-linked list.* struct ListNode {* int val;* ListNode *next;* ListNode() : val(0), next(nullptr) {}* …...

Scala集合继承体系图
Scala集合简介 1) Scala 的集合有三大类:序列 Seq、集Set、映射 Map,所有的集合都扩展自 Iterable特质。 2) 对于几乎所有的集合类,Scala 都同时提供了可变和不可变的版本,分别位于以下两个包 不可变集合…...
)
《Go 语言第一课》课程学习笔记(十五)
并发 Go 的并发方案:goroutine 并行(parallelism),指的就是在同一时刻,有两个或两个以上的任务(这里指进程)的代码在处理器上执行。 并发不是并行,并发关乎结构,并行关…...

练习 Qt 实时显示鼠标坐标位置
Qt 入门实战教程(目录) 前驱课程 本文是文章 Qt鼠标点击事件处理:显示鼠标点击位置(完整示例) 的一个作业(下文称之为“前驱课程”)。 前驱课程中,我们完整的展示了如何在QtCreat…...
Leetcode130. 被围绕的区域
Every day a Leetcode 题目来源:130. 被围绕的区域 本题给定的矩阵中有三种元素: 字母 X;被字母 X 包围的字母 O;没有被字母 X 包围的字母 O。 本题要求将所有被字母 X 包围的字母 O都变为字母 X ,但很难判断哪些 …...
6.xpath的基本使用
xpath是python做数据解析的库 目录 1 安装 2 解析本地的html文件 2.1 只有一个标签的情况 2.2 有多个标签的情况 3 解析网上的页面 4 xpath表达式 4.1 绝对路径 4.2 两个斜杠表示中间隔了0级或多级 4.3 通过属性查找 4.4 通过索引查找 4.5 获取文本内容…...

uniapp组件库总结笔记
uView-ui uView 2.0 - 全面兼容 nvue 的 uni-app 生态框架 - uni-app UI 框架 优点:整体样式风格不错 缺点:不支持vue3(可以使用社区维护的uview-plus uview-plus 3.0 - 全面兼容nvue的uni-app生态框架 - uni-app UI框架) uni-u…...

day-42 代码随想录算法训练营 动态规划 part 04
416.分割等和子集 分析:需要总和能分成两半,并且有子集能装满一半 思路: 1.dp存储:容量为j时装入的最大数值和dp[j]2.dp[j]max(dp[j],dp[j-nums[i]]nums[i]) 3.全部初始化为04.遍历顺序:外层遍历元素,内…...

Swift 周报 第三十六期
文章目录 前言新闻和社区消息称苹果公司和印度财政部官员磋商,扩大在印度的制造产能iPhone 15 Pro 机型新增泰坦灰iPhone 15 全系配 USB-C 苹果拒绝接口和安卓互通 提案正在审查的提案 Swift论坛推荐博文话题讨论关于我们 前言 本期是 Swift 编辑组整理周报的第三十…...

手写Mybatis:第19章-二级缓存
文章目录 一、目标:二级缓存二、设计:二级缓存三、实现:二级缓存3.1 工程结构3.2 二级缓存类图3.3 二级缓存队列3.3.1 FIFI缓存策略3.3.2 事务缓存3.3.3 事务管理3.3.4 修改一级缓存 3.4 缓存执行器3.4.1 执行器接口3.4.2 执行器抽象基类3.4.…...

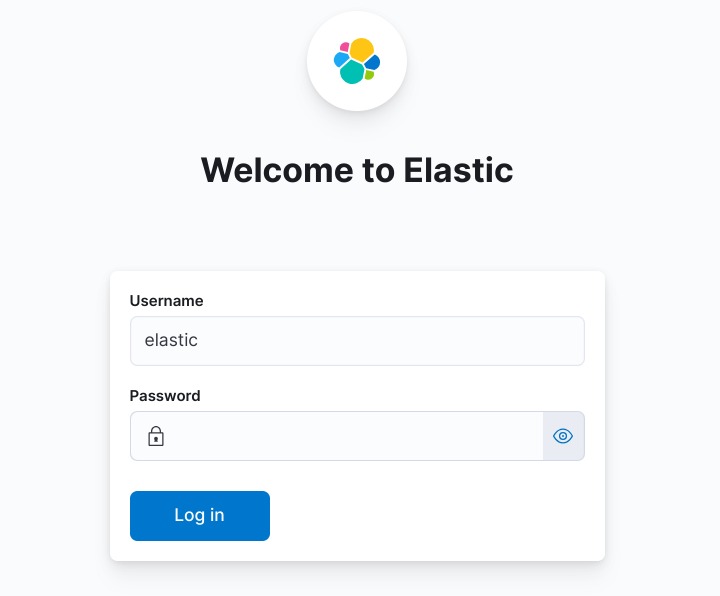
Alibaba Canal 使用记录
项目中使用 canal 来同步数据到 Elasticsearch, 遇到很多问题,做一下记录: 版本问题: 1. 解析binlog出错 ,表现为 limit excceed:xx 目前使用 mariadb 10.9.7/10.10.6 canal 1.1.6 hotfix ,在这个版本组…...
GIT实战篇,教你如何使用GIT可视化工具
系列文章目录 手把手教你安装Git,萌新迈向专业的必备一步 GIT命令只会抄却不理解?看完原理才能事半功倍! 快速上手GIT命令,现学也能登堂入室 GIT实战篇,教你如何使用GIT可视化工具 系列文章目录一、GIT有哪些常用工具…...

书匠策AI毕业论文功能全拆解:论文小白也能“一键开挂“的秘密武器,你还不知道?
各位正在被毕业论文折磨得头秃的同学们,先别急着焦虑,今天咱们来聊一个能让你从"对着空白文档发呆"直接跳转到"论文框架清晰可见"的神器——书匠策AI。 别被"AI"两个字吓到,这玩意儿说白了就是你的论文私人助…...

Ubuntu 16.04 32位系统下RT-Thread开发环境搭建全攻略
1. 项目概述:为何要重温一个“过时”的旧系统环境?如果你在2024年看到这个标题,第一反应可能是:“Ubuntu 16.04?还是32位?这都什么年代的配置了,现在不都用Ubuntu 22.04或者24.04了吗࿱…...

tinySPL 与 U-Boot 核心区别
tinySPL 与 U-Boot 核心区别 一、定位本质项目tinySPLU-Boot定位轻量极简二级引导,专为RTOS/裸机设计通用全能大型Bootloader,主打Linux系统体积极小,几十KB级别大,几百KB~数MB设计目标极速启动、轻量化、适配嵌入式轻系统功能最全…...

WebPlotDigitizer技术架构深度解析:计算机视觉驱动的图表数据提取引擎
WebPlotDigitizer技术架构深度解析:计算机视觉驱动的图表数据提取引擎 【免费下载链接】WebPlotDigitizer Computer vision assisted tool to extract numerical data from plot images. 项目地址: https://gitcode.com/gh_mirrors/we/WebPlotDigitizer 在科…...

效率翻倍!深度挖掘CANoe那些被忽略的宝藏功能:Layout同步、Favorites收藏与Write窗口妙用
效率翻倍!深度挖掘CANoe那些被忽略的宝藏功能:Layout同步、Favorites收藏与Write窗口妙用 在汽车电子测试领域,CANoe作为行业标杆工具,其核心功能如总线仿真、诊断测试等早已被工程师们熟练掌握。但鲜为人知的是,那些隐…...
到底怎么玩)
别再只把JTAG当烧录器了!一文搞懂它的边界扫描(Boundary-Scan)到底怎么玩
解锁JTAG边界扫描的隐藏技能:从烧录到硬件诊断的全能玩法 在嵌入式开发领域,JTAG接口常被简化为"烧录工具"的代名词——这种认知偏差让我们错失了它最强大的能力。想象一下:当PCB上某个关键信号无法测量时,当BGA封装的芯…...

[实测可用 v2.7.5] 桌面端 Open Claw 搭建流程全程图文教程
前言 2026 年开源圈热门的「数字员工」OpenClaw(昵称小龙虾),GitHub 星标突破 28 万,凭借本地运行 零代码操作 自动干活的核心优势广受关注!很多人误以为它是普通聊天 AI,实则是能真正操控电脑的自动化神…...

Perplexity症状查询功能性能对比白皮书:横向测试12家竞品,它在罕见病关键词召回率上领先41.6%,但时间敏感场景响应超时率达23.8%
更多请点击: https://intelliparadigm.com 第一章:Perplexity症状查询功能概览 Perplexity 是一款面向开发者与临床信息学研究人员设计的轻量级症状语义推理工具,其核心能力在于将自然语言描述的症状短语映射至标准化医学本体(如…...

嵌入式学习的第八天
字符指针常见错误 核心:字符串常量存只读内存,不可修改! #include <stdio.h> int main() {// 错误写法:指针指向字符串常量(只读),不能修改内容char *p "hello"; // *(p0) e…...
)
Linux新手看过来:手把手解决TeXLive安装与VSCode配置中的那些“坑”(从镜像下载到环境变量)
Linux新手避坑指南:TeXLive安装与VSCode配置全流程解析 第一次在Linux系统上配置TeXLive和VSCode环境时,我花了整整两天时间才把所有问题解决。那些看似简单的教程在实际操作中总会遇到各种意外情况——镜像下载速度慢如蜗牛、环境变量配置错误导致命令无…...