循迹小车原理介绍和代码示例
目录
循迹小车
1. 循迹模块使用
2. 循迹小车原理
3. 循迹小车开发和调试代码
循迹小车
1. 循迹模块使用
- TCRT5000传感器的红外发射二极管不断发射红外线
- 当发射出的红外线没有被反射回来或被反射回来但强度不够大时
- 红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态
- 被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和
- 此时模块的输出端为低电平,指示二极管被点亮
- 总结就是一句话,没反射回来,D0输出高电平,灭灯
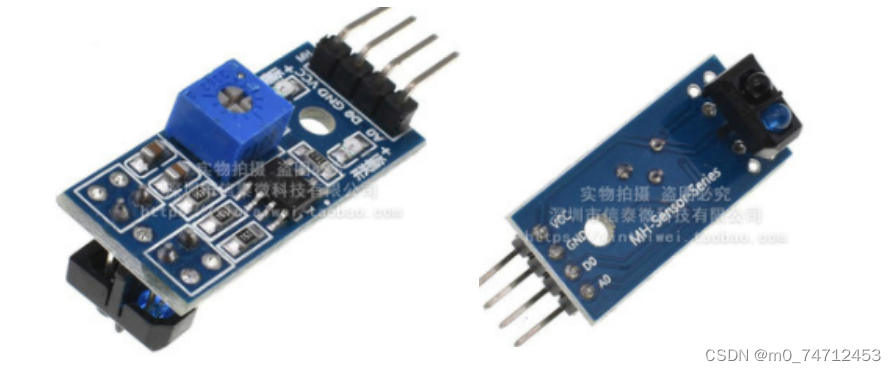
接线方式
- VCC:接电源正极(3-5V)
- GND:接电源负极 DO:TTL开关信号输出0、1
- AO:模拟信号输出(不同距离输出不同的电压,此脚一般可以不接)
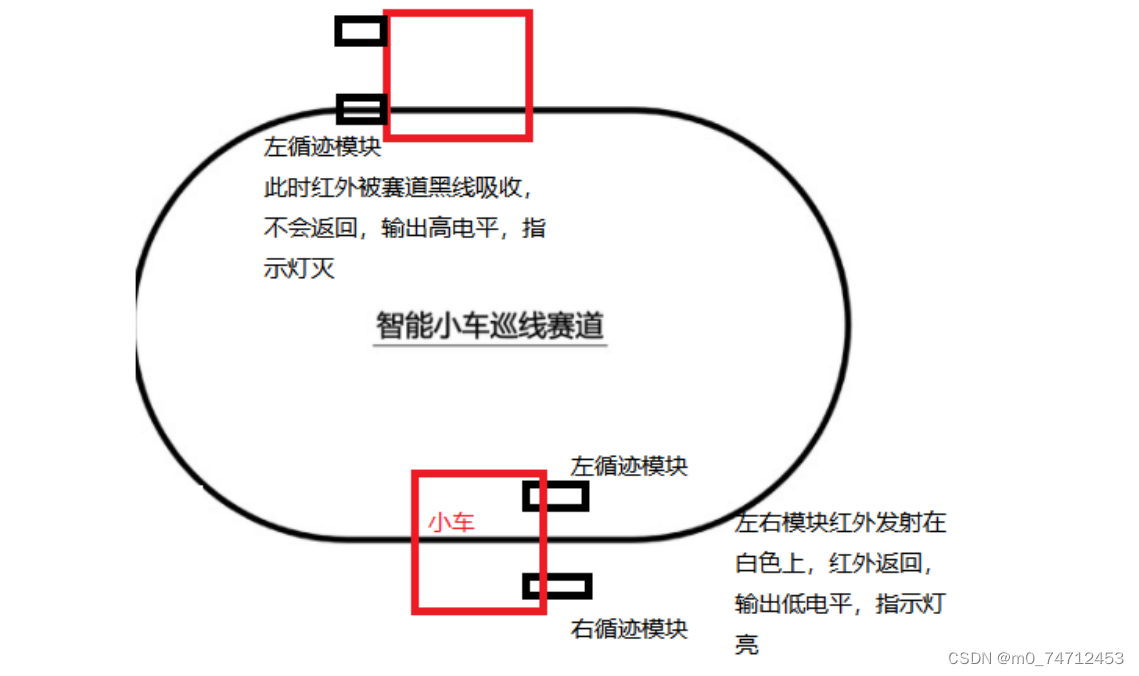
2. 循迹小车原理
由于黑色具有较强的吸收能力,当循迹模块发射的红外线照射到黑线时,红外线将会被黑线吸收,导致 循迹模块上光敏三极管处于关闭状态,此时模块上一个LED熄灭。在没有检测到黑线时,模块上两个LED常亮
总结就是一句话,有感应到黑线,D0输出高电平 ,灭灯
3. 循迹小车开发和调试代码
//main.c
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "time.h"
#include "reg52.h"
extern char speedLeft;
extern char speedRight;sbit leftSensor = P2^7;
sbit rightSensor = P2^6;void main()
{Time0Init();Time1Init();//UartInit();while(1){if(leftSensor == 0 && rightSensor == 0){speedLeft = 32;speedRight = 40;}if(leftSensor == 1 && rightSensor == 0){speedLeft = 12;//10份单位时间全速运行,30份停止,所以慢,20ms是40份的500usspeedRight = 40;}if(leftSensor == 0 && rightSensor == 1){speedLeft = 32;speedRight = 20;}if(leftSensor == 1 && rightSensor == 1){//停speedLeft = 0;speedRight = 0;}}
}//motor.c
#include "reg52.h"sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForwardLeft()
{LeftCon1A = 0;LeftCon1B = 1;
}void stopLeft()
{LeftCon1A = 0;LeftCon1B = 0;
}void goForwardRight()
{RightCon1A = 0;RightCon1B = 1;
}
void stopRight()
{RightCon1A = 0;RightCon1B = 0;
}void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}//delay.c
#include "intrins.h"void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}//time.c
#include "motor.h"
#include "reg52.h"char speedLeft;
char cntLeft = 0;char speedRight;
char cntRight = 0;void Time1Init()
{//1. 配置定时器1工作模式位16位计时TMOD &= 0x0F;TMOD |= 0x1 << 4;//2. 给初值,定一个0.5出来TL1=0x33;TH1=0xFE;//3. 开始计时TR1 = 1;TF1 = 0;//4. 打开定时器1中断ET1 = 1;//5. 打开总中断EAEA = 1;
}void Time0Init()
{//1. 配置定时器0工作模式位16位计时TMOD = 0x01;//2. 给初值,定一个0.5出来TL0=0x33;TH0=0xFE;//3. 开始计时TR0 = 1;TF0 = 0;//4. 打开定时器0中断ET0 = 1;//5. 打开总中断EAEA = 1;
}void Time1Handler() interrupt 3
{cntRight++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL1=0x33;TH1=0xFE;//控制PWM波if(cntRight < speedRight){//右前进goForwardRight();}else{//停止stopRight();}if(cntRight == 40){//爆表40次,经过了20mscntRight = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s}}void Time0Handler() interrupt 1
{cntLeft++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL0=0x33;TH0=0xFE;//控制PWM波if(cntLeft < speedLeft){//左前进goForwardLeft();}else{//停止stopLeft();}if(cntLeft == 40){//爆表40次,经过了20mscntLeft = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s}}相关文章:
循迹小车原理介绍和代码示例
目录 循迹小车 1. 循迹模块使用 2. 循迹小车原理 3. 循迹小车开发和调试代码 循迹小车 1. 循迹模块使用 TCRT5000传感器的红外发射二极管不断发射红外线当发射出的红外线没有被反射回来或被反射回来但强度不够大时红外接收管一直处于关断状态,此时模块的输出…...

redis未授权访问
文章目录 搭建环境漏洞复现安装Exlopit并使用 前提条件: 1.安装docker docker pull medicean/vulapps:j_joomla_22.安装docker-compose docker run -d -p 8000:80 medicean/vulapps:j_joomla_23.下载vulhub 搭建环境 输入下面命令,来到Redis的路径下&am…...
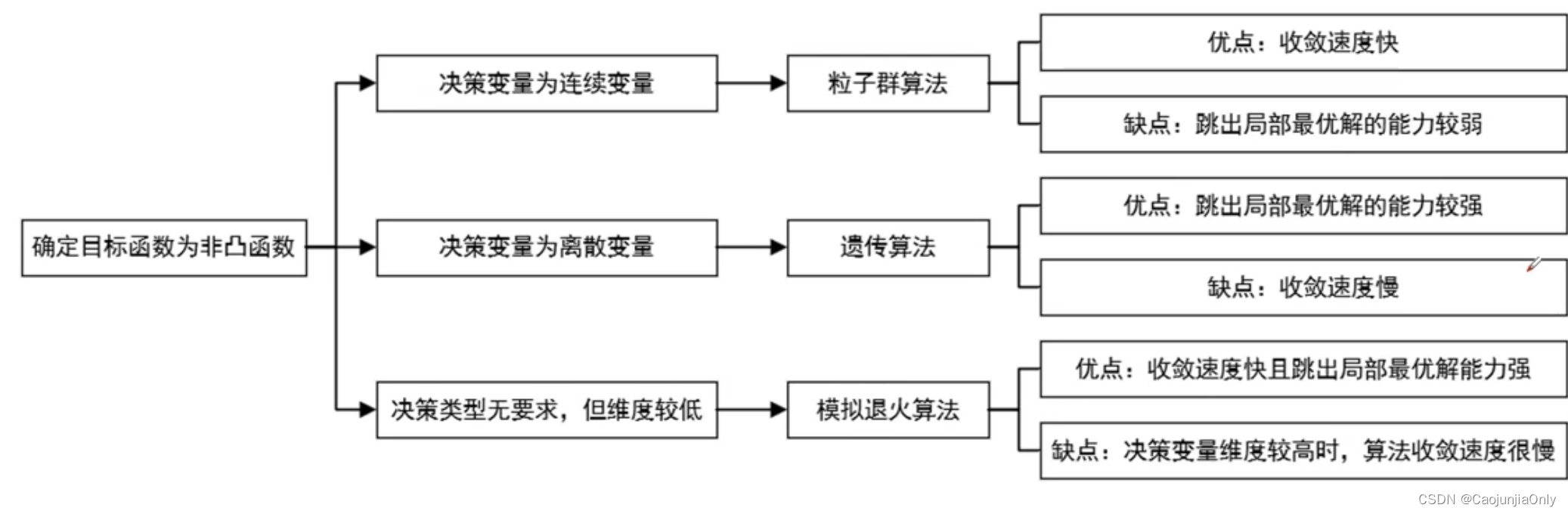
【数学建模竞赛】优化类赛题常用算法解析
优化类建模 问题理解和建模:首先,需要深入理解问题,并将问题抽象为数学模型。这包括确定问题的目标函数、约束条件和决策变量。 模型分析和求解方法选择:对建立的数学模型进行分析,可以使用数学工具和方法,…...
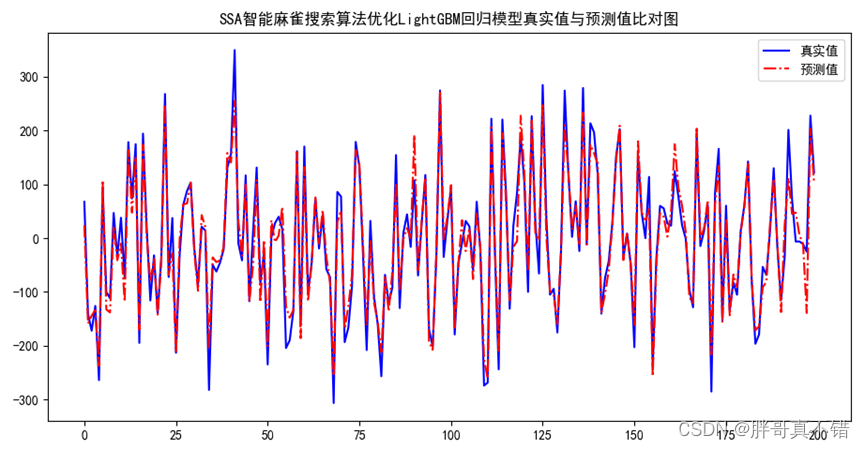
Python实现SSA智能麻雀搜索算法优化LightGBM回归模型(LGBMRegressor算法)项目实战
说明:这是一个机器学习实战项目(附带数据代码文档视频讲解),如需数据代码文档视频讲解可以直接到文章最后获取。 1.项目背景 麻雀搜索算法(Sparrow Search Algorithm, SSA)是一种新型的群智能优化算法,在2020年提出&a…...

OpenCV(二十一):椒盐噪声和高斯噪声的产生
目录 1.图像噪声介绍 2.椒盐噪声的产生 3.高斯噪声的产生 1.图像噪声介绍 噪声介绍 图像噪声是指在图像中存在的不期望的、随机的像素值变化,这些变化来源于多种因素。噪声可能导致图像细节模糊、失真或难以分辨。 以下是几种常见的图像噪声类型: 1…...

【设计模式】Head First 设计模式——构建器模式 C++实现
设计模式最大的作用就是在变化和稳定中间寻找隔离点,然后分离它们,从而管理变化。将变化像小兔子一样关到笼子里,让它在笼子里随便跳,而不至于跳出来把你整个房间给污染掉。 设计思想 将一个复杂对象的构建与其表示相分离&…...

基于Python+Django深度学习的身份证识别考勤系统设计与实现
摘 要 我们的生活都是由信息技术在潜移默化的改变着,那么早先改变校园生活的是校园信息化,改变社会人生活是各种应用软件。出行我们依靠的是滴滴,外卖我们依靠的是美团等等。从信息技术的发展至今,各色各样的技术能够满足各类人群…...

Unity控制程序退出
大家好,我是阿赵。 最近把公司的游戏发布到各种PC的游戏大厅,遇到了挺多奇怪的需求。之前介绍了一些Unity发布PC端控制窗口最大最小化、修改exe信息等问题,这次来探讨一下退出游戏的问题。 一、收到奇怪的需求 某游戏大厅要求࿰…...

C++ using的多种用法
1、引入命名空间 using namespace std; using std::cout; 2、引入基类成员 class Base{ public:void func(){cout << "Base::func()" << endl;} }; class Derived : public Base{ public:using Base::func;void func(int x){cout << "Deriv…...
Java环境的安装
最近博主也是在学校开始学习了Java,也通过老师知道了可以通过大学生学生证申(bai)请(piao) IDEA的企业版(社区版也是够学习用的)有很多同学还是没有搞懂便做一下分享。 🌱博客主页:青竹雾色间. 😘博客制作…...
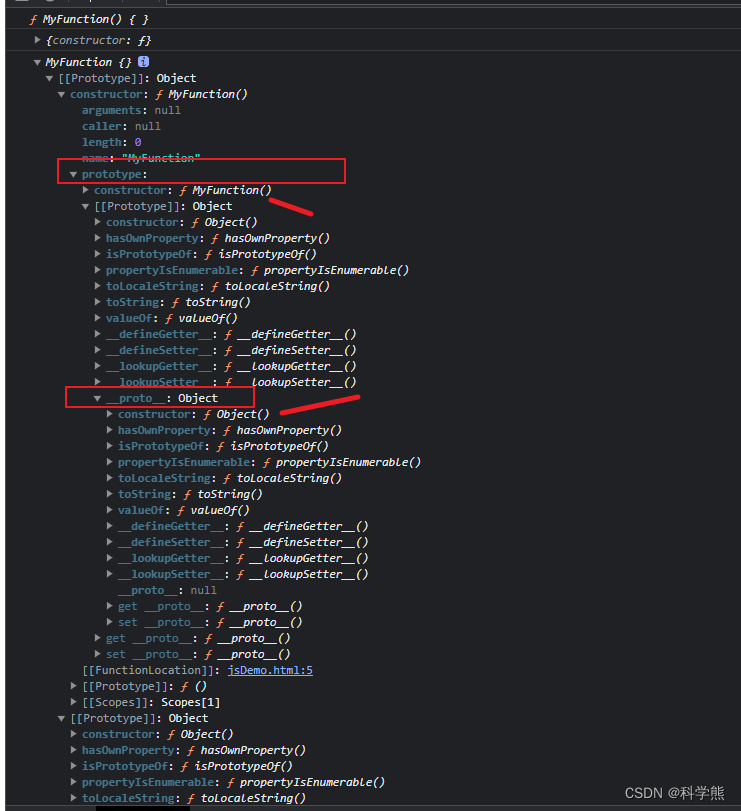
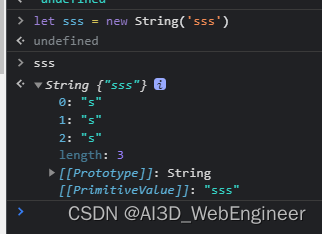
【ES6】js中的__proto__和prototype
在JavaScript中,__proto__和prototype都是用于实现对象继承的关键概念。 1、proto __proto__是一个非标准的属性,用于设置或获取一个对象的原型。这个属性提供了直接访问对象内部原型对象的途径。对于浏览器中的宿主对象和大多数对象来说,可…...

工程项目管理系统源码-简洁+好用+全面-工程项目管理
工程项目管理系统是指从事工程项目管理的企业(以下简称工程项目管理企业)受业主委托,按照合同约定,代表业主对工程项目的组织实施进行全过程或若干阶段的管理和服务。 系统定义 工程项目管理企业不直接与该工程项目的总承包企…...

后端SpringBoot+前端Vue前后端分离的项目(二)
前言:完成一个列表,实现表头的切换,字段的筛选,排序,分页功能。 目录 一、数据库表的设计 编辑二、后端实现 环境配置 model层 mapper层 service层 service层单元测试 controller层 三、前端实现 interface接…...
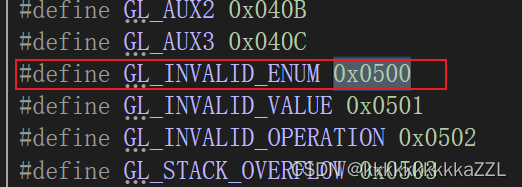
【5】openGL使用宏和函数进行错误检测
当我们编写openGL程序,没有报编译链接错误,但是运行结果是黑屏,这不是我们想要的。 openGL提供了glGetError 来检查错误,我们可以通过在运行时进行打断点查看glGetError返回值,得到的是一个十进制数,将其转…...

STM32 CAN快速配置(HAL库版本)
STM32 CAN快速配置(HAL库版本) 目录 STM32 CAN快速配置(HAL库版本)前言1 软件编程1.1 初始化1.1.1 引脚设置1.1.2 CAN参数设置1.1.3 CAN滤波器设置 1.2 CAN发送1.3 CAN接收 2 运行测试结束语 前言 控制器局域网总线(CA…...
【文末送书】全栈开发流程——后端连接数据源(二)
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站 「推荐专栏」: ★java一站式服务 ★ ★ React从入门到精通★ ★前端炫酷代码分享 ★ ★ 从0到英雄,vue成神之路★ ★ uniapp-从构建到提升★ ★ 从0到英雄ÿ…...

leetcode_27_最小栈
class MinStack { public:MinStack() {}void push(int val) {//只要是压栈,先将元素保存到_elem中_elem.push(val);//如果x小于_min中栈顶的元素,将x再压入_min中if(_min.empty() || val < _min.top()){_min.push(val);}}void pop() {//如果——min栈…...

01-ZooKeeper快速入门
1 Zookeeper概念 Zookeeper是Apache Hadoop项目下的一个子项目,是一个树形目录服务。 zookeeper翻译过来就是 动物园管理员,它是用来管理Hadoop(大象)、Hive(蜜蜂)、Pig(小猪)的管…...
[经典面试题]JS的typeof和instanceof区别
一、typeof typeof 是一个一元操作符不是函数,所以不需要传递参数,使用方法非常简单:typeof A 对于基本类型 let s "Nicholas"; let b true; let i 22; let u; let sb undefined; console.log(typeof s); // string console.…...
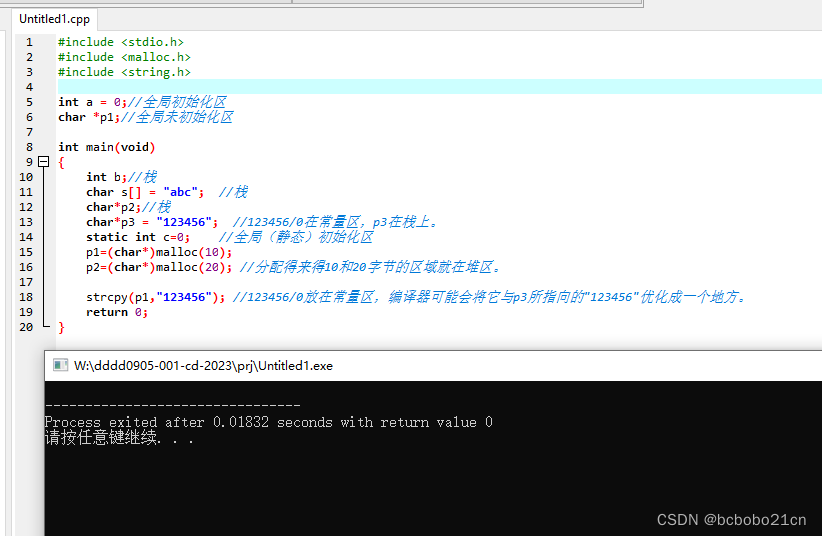
C++内存区堆和栈
在C中,内存分成5个区,堆、栈、自由存储区、全局/静态存储区和常量存储区。 栈,就是那些由编译器在需要的时候分配,在不需要的时候自动清除的变量的存储区。里面的变量通常是局部变量、函数参数等。 堆,就是那些…...

终极CoreCycler教程:简单三步完成CPU稳定性测试与优化
终极CoreCycler教程:简单三步完成CPU稳定性测试与优化 【免费下载链接】corecycler Script to test single core stability, e.g. for PBO & Curve Optimizer on AMD Ryzen or overclocking/undervolting on Intel processors 项目地址: https://gitcode.com/…...

Windows Defender终极移除指南:高效卸载13项核心服务完整教程
Windows Defender终极移除指南:高效卸载13项核心服务完整教程 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://gitcode.com/gh_mirr…...
)
【优化交叉口的绿灯时间】基于遗传算法的交通灯管理研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

Python与ChatGPT构建智能办公自动化:从任务分解到智能体系统
1. 项目概述:用Python与ChatGPT联手,让办公自动化“开口说话”如果你每天还在重复着打开Excel、复制粘贴数据、手动写邮件、整理报告这些枯燥的活儿,那这个项目可能就是你的“数字员工”入职通知书。Sven-Bo/automate-office-tasks-using-cha…...
)
从零到联网:QNX Neutrino RTOS安装后的第一个网络配置实战(含ifconfig与DHCP详解)
从零到联网:QNX Neutrino RTOS安装后的第一个网络配置实战 当你第一次看到QNX Neutrino RTOS的Photon桌面时,那种兴奋感可能很快会被一个现实问题冲淡——这个看起来酷炫的系统怎么连上网?作为实时操作系统领域的标杆,QNX在车载系…...

基于Kubernetes Lease构建分布式部署锁:解决CI/CD环境下的资源竞争
1. 项目概述:从“clawfight”看一场被遗忘的社区技术博弈看到“2019-02-18/clawfight”这个标题,很多人的第一反应可能是困惑。它不像一个标准的软件项目名,没有清晰的版本号,也没有指明具体的技术栈。但恰恰是这种看似随意的命名…...

2026产品经理学数据分析对升职的价值
一、数据分析能力对产品经理升职的重要性数据分析能力已成为产品经理的核心竞争力之一。掌握数据分析技能可以帮助产品经理更精准地决策,提升产品成功率,从而在职业发展中占据优势。二、数据分析在产品经理工作中的具体应用通过数据分析优化产品功能迭代…...

YouMightNotNeedJS与响应式设计:打造完美适配所有设备的UI组件
YouMightNotNeedJS与响应式设计:打造完美适配所有设备的UI组件 【免费下载链接】YouMightNotNeedJS 项目地址: https://gitcode.com/gh_mirrors/yo/YouMightNotNeedJS 在现代网页开发中,实现跨设备兼容的响应式界面是提升用户体验的关键。YouMig…...

Python量化交易框架moltfi:从回测到实盘的轻量级解决方案
1. 项目概述:一个为现代金融科技而生的开源量化框架如果你在金融科技或者量化交易领域摸爬滚打过一段时间,大概率会和我有同样的感受:市面上的开源量化框架,要么是“巨无霸”级别的庞然大物,功能齐全但学习曲线陡峭&am…...

vue基于springboot框架的社区医疗预约挂号平台的设计与实现
目录同行可拿货,招校园代理 ,本人源头供货商项目概述技术栈核心功能模块系统架构设计关键实现细节扩展性与优化方向项目技术支持源码获取详细视频演示 :同行可合作点击我获取源码->->进我个人主页-->获取博主联系方式同行可拿货,招校园代理 ,本人源头供货商…...