Agisoft Metashape相机标定笔记
Lens Calibration(镜头标定)
使用Metashape进行自动相机标定是可能的。Metashape使用LCD显示屏作为标定目标(可选:使用打印的棋盘格图案,但需保证它是平坦的且单元格是正方形)。
相机标定步骤支持全相机标定矩阵的估计,包含非线性的畸变参数。相机模型的细节请参照附录D——相机模型板块。
注意:在通用的工作流程中,相机标定步骤可以跳过。因为Metashape会在图像定向过程中进行相机自标定。但是,如果定向结果不稳定,例如,由于影像之间缺乏连接点,额外进行单独的相机标定步骤也许是有用的。
以下的相机标定参数可以被估计:
- f 像素单位的相机焦距(注意不是透镜焦距)
- cx cy 像主点坐标,即相机主光轴与传感器平面的交点在图像坐标系下的像素坐标。
- b1 b2 仿射和偏斜(非正交)变换系数【affinity and skew ( non orthogonality )transformation coeffcients 】
- k1 k2 k3 k4 径向畸变参数
- p1 p2 切向畸变参数
(一般项目考虑fx fy cx cy k1 k2 k3 p1 p2足够了)

在点开Metashape的相机标定工具之前,先在Metashape加载你拍摄相机标定板的一组影像。
为了拍摄标定板的影像,可参照以下步骤:
- 菜单栏Tools的Lens子菜单,选择Show ChessBoard,打开标定板图案
- 使用鼠标滚轮放大或缩小标定板图案。调整缩放直到每块屏幕的方格数量超过10
- 对着标定板拍摄一系列的影像,角度应有细微的差别。每次定焦拍摄的最小影像至少为3
- 在标定(校准)变焦镜头时,如果不小心改变了镜头焦距,需要重复上一步。
- 点击标定图案的任一处或按下返回按钮回到主程序。
- 将捕捉到的照片上传到计算机。
在拍摄标定图案的照片时,尽量遵循以下指导原则:
- 确保焦距在整个拍摄过程中保持恒定(如果使用变焦镜头)
- 避免照片的眩光。如有需要,请把光源移开
- 照片的整个图幅最好全被标定图案覆盖。如果需要,将摄像机移近液晶屏幕
加载标定图案的照片:
- 在工作空间面板新建chunk(区块)
- 菜单栏添加影像
- 加载好的影像显示在Photos面板
注意:
- 双击“照片”窗格中的缩略图,打开任何照片。为了获得良好的校准,照片应该相当清晰,与清晰的细胞之间的边界。
- 不需要的照片,可以右键随时轻松删除。
- 在校正鱼眼镜头前,在“工具”菜单的“相机校正”对话框中设置相应的相机类型。请参阅相机校准部分中有关其他相机校准设置的信息
标定相机镜头:
- 从Tools主菜单下的Lens子菜单选择Calibrate Lens
- 在Calibrate Lens选择想要的标定参数
- 将出现进度对话框,显示当前处理状态。要取消处理,请单击“取消”按钮。
- 标定结果将显示在“相机标定…”的“Adjusted”选项卡上对话框。可以使用调整后选项卡上的保存按钮将调整后的值保存到文件中。如果使用相同的相机和镜头,保存的镜头标定数据稍后可以在另一个区块或项目中使用
注意:
- 保存镜头的校准参数后,可以在单独的块中处理由同一相机和镜头捕获的实际图像集。为了防止校准数据在“Aligh Photo”过程中被细化,应在“初始”选项卡上选中包含要处理的数据的块的“固定标定”框。在这种情况下,初始标定值在对齐照片过程中不会改变。
标定完成后,将显示以下信息: 每张照片上都会显示检测到的棋盘角点(可以通过在“照片”窗格中双击其名称来打开该照片)。当大多数角点被正确检测到时,效果会更好。对于每个检测到的角点,还显示检测到的角点位置和根据计算的校准估计的位置之间的重投影误差。误差缩放 x20 倍以供显示
相关文章:
Agisoft Metashape相机标定笔记
Lens Calibration(镜头标定) 使用Metashape进行自动相机标定是可能的。Metashape使用LCD显示屏作为标定目标(可选:使用打印的棋盘格图案,但需保证它是平坦的且单元格是正方形)。 相机标定步骤支持全相机标定矩阵的估计ÿ…...

vue-cropper在ie11下选择本地图片后,无显示、拒绝访问的问题
问题:vue-cropper在ie11下选择本地图片后,网页上并未显示出图片,打开F12有报错:拒绝访问blabla的。但是在chrome下一切正常。 开发环境:node14.17.5 , vue2 , vue-cropper0.6.2 , macOS big sur 11.4(M1). 解决办法&…...
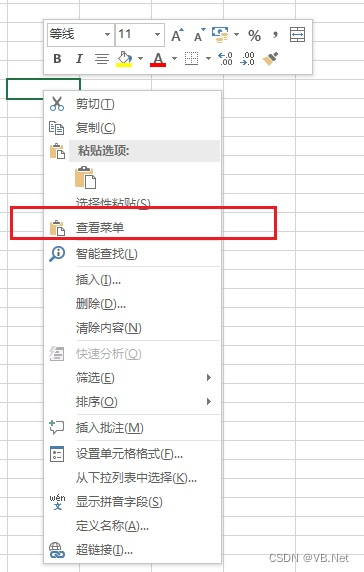
Excel VSTO开发11-自定义菜单项
版权声明:本文为博主原创文章,转载请在显著位置标明本文出处以及作者网名,未经作者允许不得用于商业目的。 11 自定义菜单项 自定义菜单项可以在插件启动时候添加,即增加到ThisAddIn_Startup() 内。 下面以具体代码说明&#x…...
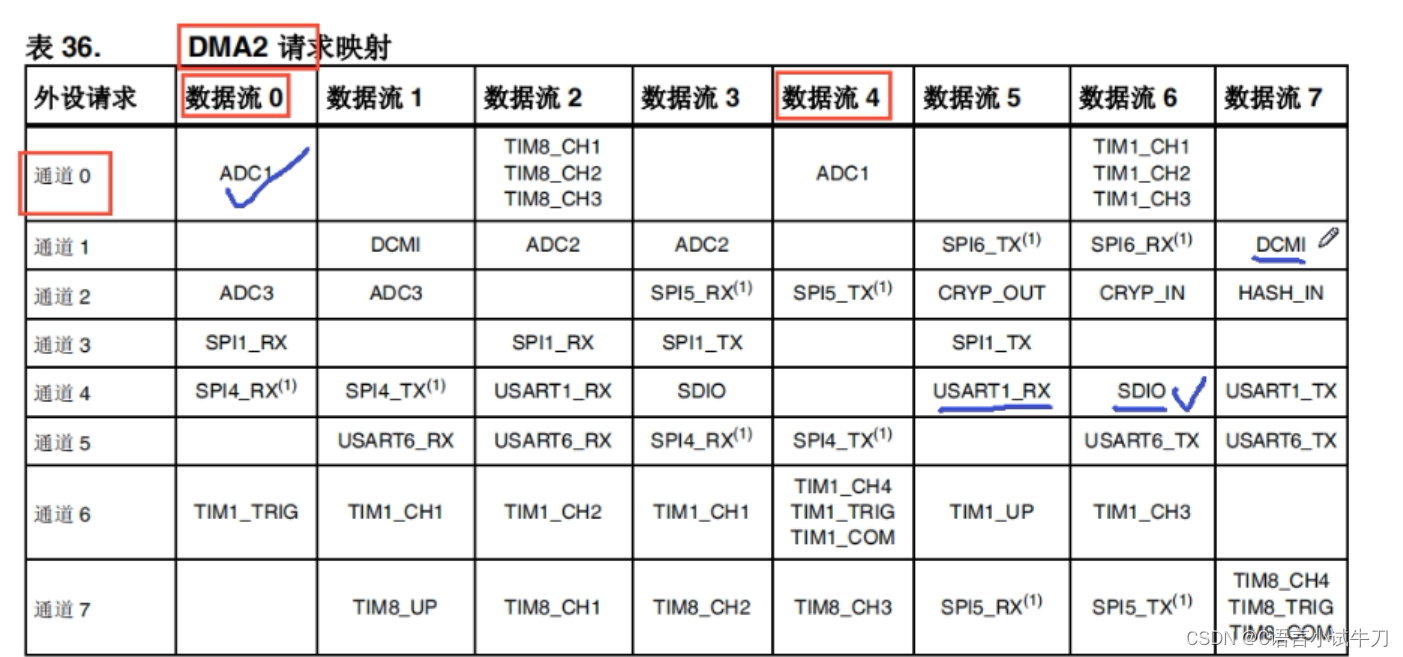
stm32之30.DMA
DMA(硬件加速方法)一般用于帮运比较大的数据(如:摄像头数据图像传输),寄存器-》DMA-》RAM 或者 RAM-》DMA-》寄存器提高CPU的工作效率 源码-- #include "myhead.h" #include "adc.h"#…...
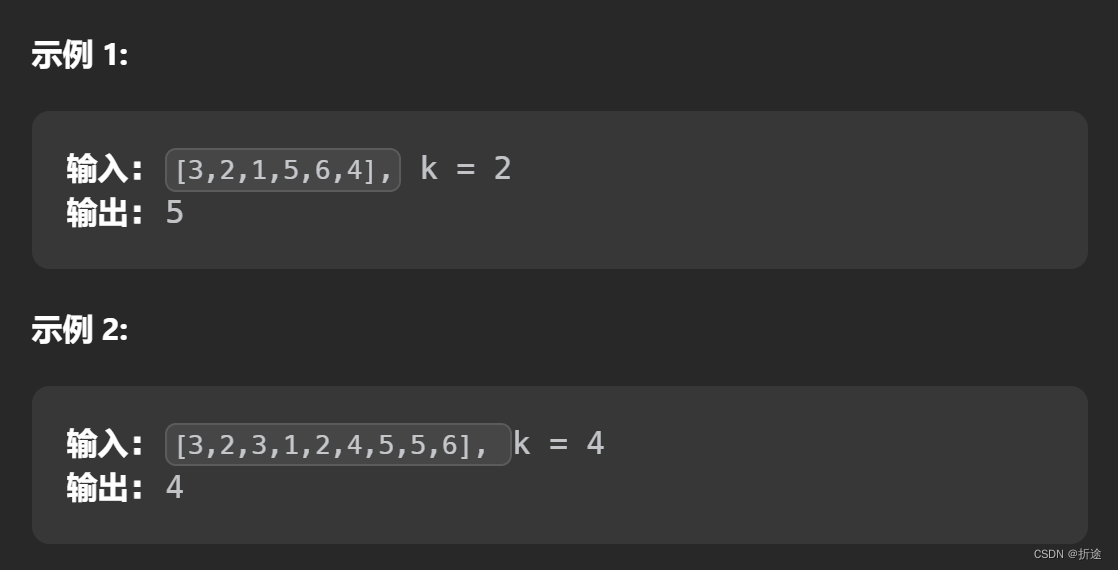
【LeetCode75】第四十九题 数组中的第K个最大元素
目录 题目: 示例: 分析: 代码: 题目: 示例: 分析: 题目很简单,就是给我们一个数组,让我们返回第K大的元素。 那么很直观的一个做法就是我们直接对数组进行降序排序…...
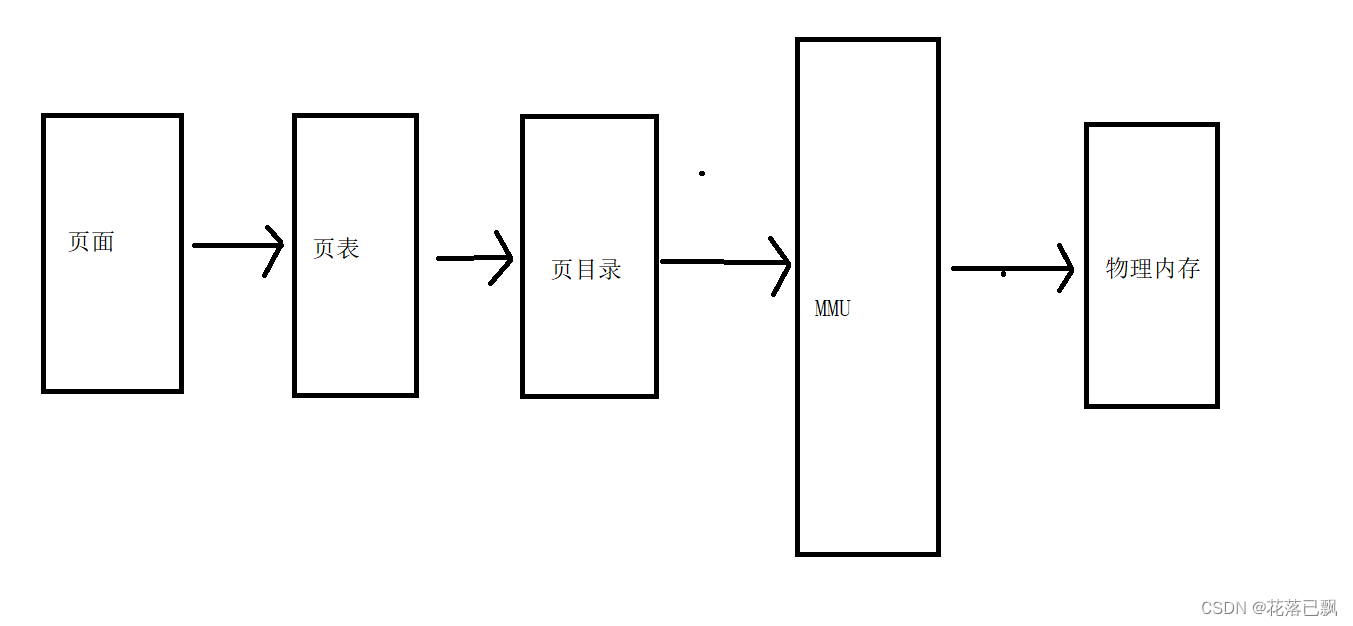
嵌入式面试笔试刷题(day14)
文章目录 前言一、进程控制块1.PCB控制块的作用2.PCB的存储位置 二、进程的三级映射三、return , exit, pthread_exit四、pthread_join作用五、互斥锁和信号量的区别六、怎么判断链表是否有环总结 前言 本篇文章继续我们的刷题之路。 一、进程控制块 这里只讲解进程的PCB控制…...

好用免费的Chat GPT(亲测有用)
1、MindLink麦灵 MindLink麦灵 点进登录后 普通用户可以提问100次 2、你问我答 你问我答 无限次数的。 3、灵感 灵感 点击链接后会提示你如何下载使用。 这个有win版和mac版,点击登陆后,每日都会有30次GPT3/3.5的提问。 4、WebTab 在浏览器插件中…...
SpringBoot项目--电脑商城【上传头像】
一、易错点 1.错误写法: 把文件存到数据库中,需要图片时访问数据库,数据库将文件解析为字节流返回,最后写到本地的某一个文件.这种方法太耗费资源和时间了 2.正确写法: 将对应的文件保存在操作系统上,然后再把这个文件路径记录下来,因为在记录路径的…...
优化SOCKS5的方法
在今天的互联网世界中,保护个人隐私和提升网络速度至关重要。作为一种常用的代理协议,SOCKS5代理服务器不仅可以保护您的隐私,还可以实现更快速的网络访问。本文将为您介绍一些优化SOCKS5代理服务器的方法,以提高网络速度和安全性…...

使用 HelpLook Chatbot,让AI聊天机器人变成销售经理
想要增强AI聊天机器人销售技巧的话,我们需要一个强大的搭建工具来帮助我们增加客户互动,通过很多的客户互动数据来支撑和锻炼我们的AI聊天机器人。在本篇文章中,looklook将会系统地来说说该如何定制聊天机器人的行为。 使用AI聊天机器人的好处…...
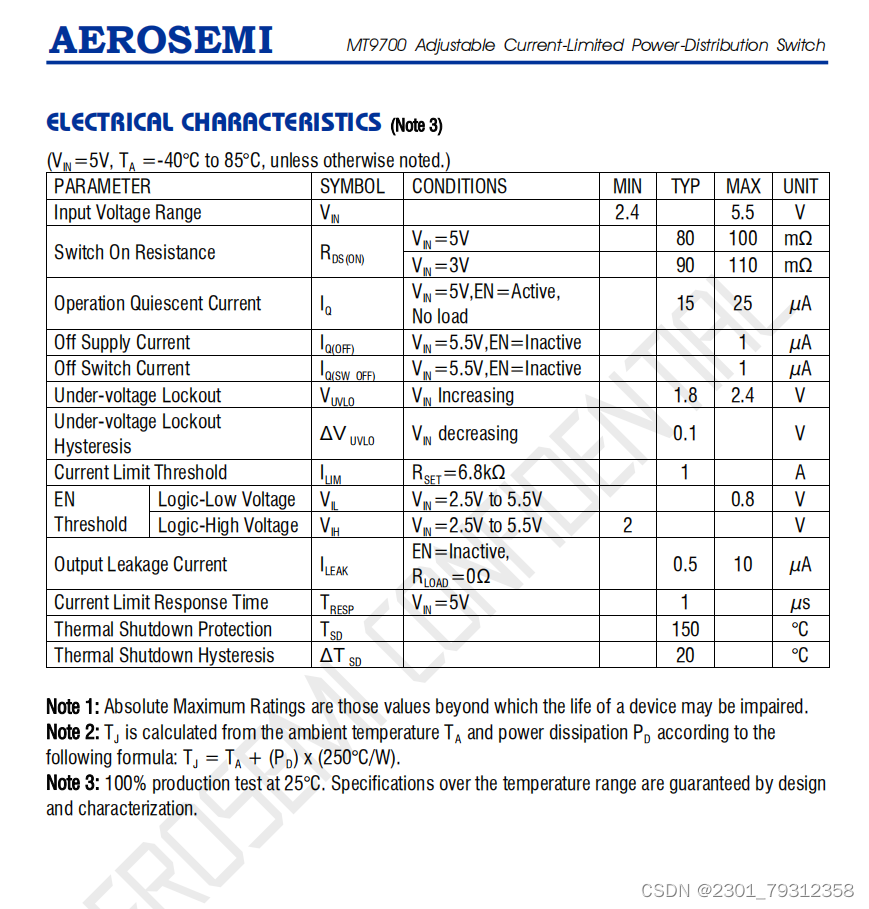
MT9700 80mΩ,可调快速响应限流配电开关芯片
MT9700 80mΩ,可调快速响应限流配电开关芯片 特征 符合USB规范 集成80mΩ电源MOSFET 低电源电流 15μA典型开启状态 1μA典型关闭状态 宽输入电压Range:2.4V到5.5V 快速瞬态响应:<2μs 反向电流流阻塞 热关机保护 热插件应…...

RabbitMQ之延迟队列
RabbitMQ之延迟队列 1. 延迟队列概念2. 延迟队列使用场景3. RabbitMQ 中的 TTL3.1 消息设置 TTL3.2 队列设置 TTL3.3 两者的区别 4. 整合 SpringBoot4.1 创建项目4.2 添加依赖4.3 修改配置文件4.4 添加 Swagger 配置类 5. 队列 TTL5.1 代码架构图5.2 配置文件类代码5.3 消息生产…...

k8s部署手册-v06
一、基础配置 1.修改主机名 hostnamectl set-hostname k8s-master01 hostnamectl set-hostname k8s-master02 hostnamectl set-hostname k8s-master03 hostnamectl set-hostname k8s-node01 hostnamectl set-hostname k8s-node022.添加 主机名与IP地址解析 cat > /etc/ho…...

Qt 5.15集成Crypto++ 8.7.0(MSVC 2019)笔记
一、背景 笔者已介绍过在Qt 5.15.x中使用MinGW(8.10版本)编译并集成Crypto 8.7.0。 但是该编译出来的库(.a和.dll)不适用MSVC(2019版本)构建环境,需要重新编译(.lib或和.dll…...
)
LeetCode——贪心篇(一)
刷题顺序及思路来源于代码随想录,网站地址:https://programmercarl.com 目录 455. 分发饼干 376. 摆动序列 53. 最大子数组和 122. 买卖股票的最佳时机 II 55. 跳跃游戏 45. 跳跃游戏 II 1005. K 次取反后最大化的数组和 455. 分发饼干 假设你是…...
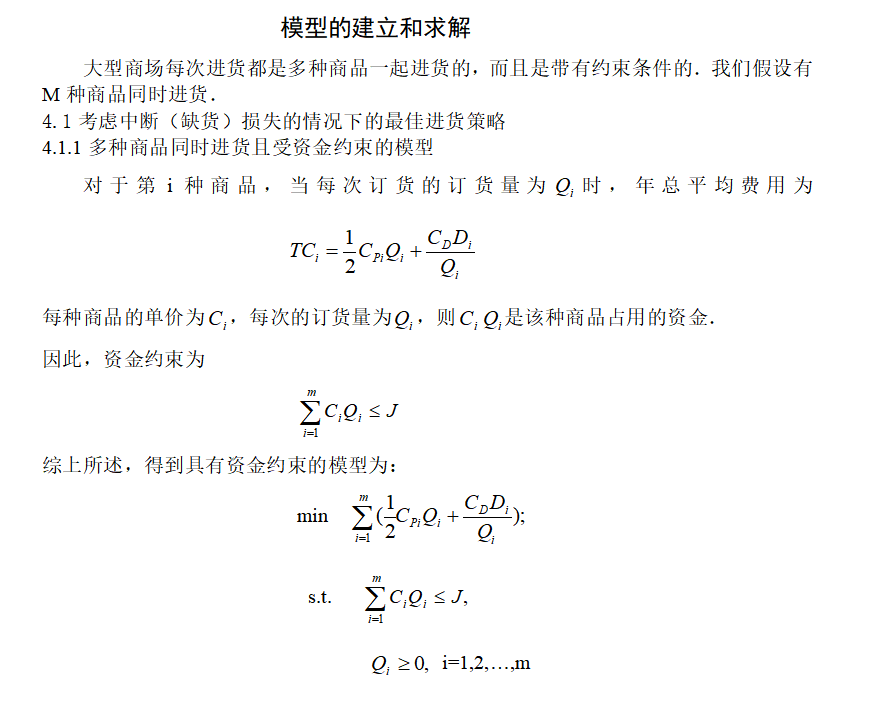
2023高教社杯 国赛数学建模C题思路 - 蔬菜类商品的自动定价与补货决策
1 赛题 在生鲜商超中,一般蔬菜类商品的保鲜期都比较短,且品相随销售时间的增加而变差, 大部分品种如当日未售出,隔日就无法再售。因此, 商超通常会根据各商品的历史销售和需 求情况每天进行补货。 由于商超销售的蔬菜…...
线性运算的推广与矩阵基础)
【理解线性代数】(四)线性运算的推广与矩阵基础
1. 数值加法和乘法 数值加法与乘法,是小学数学课程中的基本数学运算。例如: 加法:112 乘法:2*24 在这个知识层次下,运算的基本单位是数字。 2. 从数值到向量 数值加法,可以看作一维空间中的向量加法&…...

C# 什么是继承和派生
C# 什么是继承和派生 在 C# 中,继承(Inheritance)是一种机制,它允许一个类(子类)从另一个类(父类)中继承属性和方法。这种关系使得子类可以重用父类的代码,同时可以在子…...

无涯教程-JavaScript - HEX2BIN函数
描述 HEX2BIN函数将十六进制数转换为二进制数。 语法 HEX2BIN (number, [places])争论 Argument描述Required/Optionalnumber 您要转换的十六进制数。 数字不能超过10个字符(40位)。数字的最高有效位是符号位(从右数第40位)。其余的39位是幅度位。 负数使用二进制补码表示。…...
前端面试0906
// 请给出输出结果 function foo(){ console.log(a); } function bar(){ var a 3; console.log(this.a); foo(); } var a 2; bar(); 2 2 // 请从下面的问题中挑选3道进行回答 1. 防抖和节流分别是什么,一般用在什么场景? 防抖(Debounc…...

Docker 部署 SpringBoot 项目超详细教程
Docker 部署 SpringBoot 项目超详细教程一篇适合新手的 Docker 部署 SpringBoot 实战教程,包含: Docker 安装镜像加速SpringBoot 打包Dockerfile 编写构建镜像容器部署日志查看防火墙开放常见问题解决 图文并茂,保姆级教学。本文假设你已拥有…...

PhonePi-MCP:基于MCP协议实现AI智能体自动化操控Android手机
1. 项目概述:当你的手机成为AI的“眼睛”与“双手” 最近在折腾AI智能体(Agent)时,我一直在思考一个问题:如何让这些运行在云端或本地电脑上的“大脑”真正地与现实世界互动?比如,让它帮我查一…...

Arm Neoverse CMN-650错误处理与事务管理机制解析
1. Arm Neoverse CMN-650错误处理机制深度解析在现代多核处理器系统中,错误处理机制的设计直接影响着系统的可靠性和稳定性。Arm Neoverse CMN-650作为一款高性能一致性网状网络,其错误处理架构展现了精妙的设计理念。1.1 HN-I节点的错误分类与处理HN-I&…...

集成三相桥驱动的MCU:AiP8F7201电机控制方案解析
1. 项目概述:为什么我们需要“集成三相桥式驱动的微控制器”?在电机控制领域,尤其是消费电子、家电、工业自动化这些我们每天都会接触到的场景里,工程师们一直在和一堆“麻烦”作斗争。想象一下,你要设计一个驱动无刷直…...

为什么92%的团队在ElevenLabs多角色对话项目中3周内失败?——基于17个真实SaaS客户日志的根因分析
更多请点击: https://intelliparadigm.com 第一章:为什么92%的团队在ElevenLabs多角色对话项目中3周内失败?——基于17个真实SaaS客户日志的根因分析 ElevenLabs 的 VoiceLab API 虽然提供了强大的多说话人语音合成能力,但其多角…...

基于RAG与智能分块构建LLM本地知识库:llm-books开源工具实战
1. 项目概述:一个为LLM“喂书”的开源工具最近在折腾大语言模型本地应用的朋友,可能都遇到过同一个头疼的问题:怎么让模型“读懂”我手头那几百页的PDF报告、电子书或者研究论文?直接复制粘贴?上下文长度不够。手动分段…...

Go语言建造者模式:复杂对象构建
Go语言建造者模式:复杂对象构建 1. 建造者实现 type User struct {Name stringAge intEmail stringPhone stringAddress string }type UserBuilder struct {user *User }func NewUserBuilder() *UserBuilder {return &UserBuilder{user: &User{}…...

自动驾驶-数据解析01:四元数04【nuPlan 数据集中的 ego2global_rotation 四元数是采集时生成的,还是后期处理得到的?】
标题:nuPlan 数据集中的 ego2global_rotation 四元数是采集时生成的,还是后期处理得到的? 1. 先给结论 在讨论 nuPlan 数据集中的自车姿态四元数时,不能简单地说: 它一定是车辆采集瞬间直接生成的原始四元数。也不能简单地说: 它是后期人工标注生成的四元数。更准确的…...

基于RAG架构的企业级私有化大模型知识库实战指南
1. 项目概述:当大语言模型遇见企业级数据如果你最近在关注企业级AI应用,特别是如何安全、高效地利用大语言模型来处理和分析内部数据,那么“h2oai/h2ogpt”这个项目绝对值得你花时间深入了解。这不仅仅是一个简单的聊天机器人接口,…...

嵌入式以太网模块WIZ5500应用指南:从SPI接口到物联网稳定连接
1. 项目概述:为什么你的物联网项目需要一个有线网络“锚点”无线网络(Wi-Fi)确实方便,但做过几个实际项目的朋友都知道,它的“方便”有时是建立在“不确定性”之上的。信号波动、信道拥堵、复杂的认证流程,…...