二轮平衡小车3:PID速度环
使用芯片:STM32 F103 C8T6
今日继续我的二路平衡小车开发之路,今日编写的是二轮平衡小车的PID速度环,我准备了纸飞机串口助手软件来辅助测试调节PID。
本文主要贴代码,之前的文章都有原理,代码中相应初始化驱动部分也有注释~~
文章提供源码,解释以及工程下载,测试效果视频。
PID基础概念:
这里简单介绍一下PID算法是反馈调节的算法,只需输入期望值与传感器反馈值即可实现自动调节电机PWM控制速度始终在期望值附近,即:反馈小了就加占空比,反馈大了就减占空比,但却不是简单的加减运算。
原理之前写过,这里直接贴出文章连接:
PID输出反馈回路调控算法原理_NULL指向我的博客-CSDN博客
编码器测速逻辑:
此处贴出函数,相关逻辑在之前的文章讲过:
MSP432自主开发笔记1:编码器测速_外部中断捕获法测速\测正反转_msp432编码器_NULL指向我的博客-CSDN博客
对于速度单位的理解与计算有各种各样,有喜欢算到 (cm/s) (m / s) (rad / second )等等,需要通过不同电机转速,需求来选定。
这里我是用的电机减速比比较大,扭矩与载重大,但因此转速就慢,因此我采用每25ms采样的脉冲数作为速度来比较,使速度环闭合。
//定时器3中断服务程序 (编码器捕获脉冲数)
void TIM3_IRQHandler(void)
{ if(TIM_GetITStatus(TIM3, TIM_IT_CC1)) //通道1发生捕获事件{ Wheel[2].CAPTURE++;TIM_ClearITPendingBit(TIM3, TIM_IT_CC1);} //每次进入中断都要清空中断标志,否则主函数将无法正常执行if(TIM_GetITStatus(TIM3, TIM_IT_CC2)) //通道2发生捕获事件{Wheel[2].CAPTURE++;TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);} //每次进入中断都要清空中断标志,否则主函数将无法正常执行 if(TIM_GetITStatus(TIM3, TIM_IT_CC3)) //通道3发生捕获事件{Wheel[1].CAPTURE++;TIM_ClearITPendingBit(TIM3, TIM_IT_CC3);} //每次进入中断都要清空中断标志,否则主函数将无法正常执行 if(TIM_GetITStatus(TIM3, TIM_IT_CC4)) //通道4发生捕获事件{Wheel[1].CAPTURE++;TIM_ClearITPendingBit(TIM3, TIM_IT_CC4);} //每次进入中断都要清空中断标志,否则主函数将无法正常执行
}void calculate_speed(void)
{uint16_t tt;tt=50;if(SPEED_flag==1){SPEED_flag=0;Wheel[1].SPEED=Wheel[1].CAPTURE;Wheel[2].SPEED=Wheel[2].CAPTURE;// printf("V1=%d,V2=%d\r\n",Wheel[1].SPEED,Wheel[2].SPEED);printf("P1=%d,P2=%d\r\n",Wheel[1].PWM_DIV,Wheel[2].PWM_DIV);PRINT(plotter, "%d, %d, %d",Wheel[1].SPEED,Wheel[2].SPEED,tt); PID_guide_peed(tt,tt);set_wheels(Wheel[1].PWM_DIV,Wheel[2].PWM_DIV,1,1);Wheel[1].CAPTURE=0; Wheel[2].CAPTURE=0;}
}PID算法贴出:
参数需要自己调,玄学调参......
#include "PID.h"PID_TYPE suduhuan1;
PID_TYPE suduhuan2;//PID 1~4号轮设置期望速度
void PID_guide_peed(uint16_t w1,uint16_t w2)
{Pid_increment_Cal(&suduhuan1,w1,Wheel[1].SPEED);Pid_increment_Cal(&suduhuan2,w2,Wheel[2].SPEED); Wheel[1].PWM_DIV=suduhuan1.OutPut;Wheel[2].PWM_DIV=suduhuan2.OutPut;
}PID_结构体 target_目标 measure_当前值
void Pid_increment_Cal(PID_TYPE *PID, int target, int measure)
{PID->Error = target - measure; // 误差PID->Pout = PID->P * (PID->Error - PID->PreError); // 比例控制PID->Iout = PID->I * PID->Error; // 积分控制PID->Dout = PID->D * (PID->Error - 2 * PID->PreError + PID->PrePreError); // 微分控制// 比例 + 积分 + 微分总控制if (PID->Iout > PID->Irang) // 积分限幅PID->Iout = PID->Irang;if (PID->Iout < -PID->Irang) // 积分限幅PID->Iout = -PID->Irang;PID->OutPut += PID->Pout + PID->Iout + PID->Dout;PID->PrePreError = PID->PreError; // 记忆e(k-2)PID->PreError = PID->Error; // 记忆e(k-1)}void PidParameter_init(void)
{suduhuan1.P =38;suduhuan1.I=18;suduhuan1.D=0;suduhuan1.PreError=0;suduhuan1.PrePreError=0;suduhuan1.Irang=12;suduhuan1.OutPut=0;suduhuan2.P =38;suduhuan2.I=18;suduhuan2.D=0;suduhuan2.PreError=0;suduhuan2.PrePreError=0;suduhuan2.Irang=12;suduhuan2.OutPut=0;
}
#ifndef _PID_H_
#define _PID_H_#include "headfire.h"typedef struct PID
{int P; //参数int I;int D;float Error; //比例项e(k)float Integral; //积分项int Differ; //微分项int PreError; //e(k-1)int PrePreError;//e(k-2)float Ilimit;float Irang;int Pout;int Iout;int Dout;int OutPut;uint8_t Ilimit_flag; //积分分离
}PID_TYPE;extern PID_TYPE suduhuan1;
extern PID_TYPE suduhuan2;PID_结构体 target_目标 measure_当前值
void Pid_increment_Cal(PID_TYPE *PID, int target, int measure);
void PidParameter_init(void); //PID参数初始化 //PID 设置期望速度
void PID_guide_peed(uint16_t w1,uint16_t w2);#endif相关文章:

二轮平衡小车3:PID速度环
使用芯片:STM32 F103 C8T6 今日继续我的二路平衡小车开发之路,今日编写的是二轮平衡小车的PID速度环,我准备了纸飞机串口助手软件来辅助测试调节PID。 本文主要贴代码,之前的文章都有原理,代码中相应初始化驱动部分也…...

C语言之练习题
欢迎来到我的世界 希望这篇文章对你有所帮助,有不足的地方还请指正,大家一起学习交流 ! 目录 前言编程题第一题:珠玑妙算第二题:寻找奇数第三题:寻找峰值第四题:数对 总结 前言 这是暑假题目的收尾文章&am…...
没钱,没人,没经验?传统制造型企业如何用无代码实现转型
2023年,国家市场监督管理总局发布了三项重要标准,包括《工业互联网平台选型要求》、《工业互联网平台微服务参考框架》和《工业互联网平台开放应用编程接口功能要求》。这些标准的发布对于完善工业互联网平台标准体系,提升多样化工业互联网平…...

CentOS ARM 部署 kubernetes v1.24.6
1.背景 之前安装的kubernetes版本为v1.19.0 树莓派使用(CentOS7.9 armv71 Kubernetes1.19.0), 由于版本过低,一些HPA相关的功能支持不是特别好,因此需要将版本升级,本次会将版本升级为v1.24.6. 2. 如何upgrade 2.1. 优雅升级 kubeadm自带…...

LeetCode 725. Split Linked List in Parts【链表】中等
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...

云计算中的负载均衡技术,确保资源的平衡分配
文章目录 1. 硬件负载均衡器2. 软件负载均衡器3. DNS负载均衡4. 内容分发网络(CDN) 🎈个人主页:程序员 小侯 🎐CSDN新晋作者 🎉欢迎 👍点赞✍评论⭐收藏 ✨收录专栏:云计算 ✨文章内…...

探索 SOCKS5 代理在跨境电商中的网络安全应用
随着全球化的发展,跨境电商成为了商业界的一颗新星,为企业提供了无限的发展机遇。然而,随之而来的是网络安全的挑战,特别是在处理国际网络流量时。在这篇文章中,我们将探讨如何利用 SOCKS5 代理和代理 IP 技术来加强跨…...

全网独家:编译CentOS6.10系统的openssl-1.1.1多版本并存的rpm安装包
CentOS6.10系统原生的openssl版本太老,1.0.1e,不能满足一些新版本应用软件的要求,但是它又被wget、mysql-libs、python-2.6.6、yum等一众系统包所依赖,不能再做升级。故需考虑在不影响系统原生openssl的情况下,安装较新…...

【go】异步任务解决方案Asynq实战
文章目录 一.Asynq介绍二.所需工具三.代码示例四.Reference 一.Asynq介绍 Asynq 是一个 Go 库,一个高效的分布式任务队列。 Asynq 工作原理: 客户端(生产者)将任务放入队列服务器(消费者)从队列中拉出任…...

掌握 Android 自动化测试框架 UiAutomator UiAutomator2
掌握 Android 自动化测试框架 UiAutomator & UiAutomator2 一、UiAutomator 简介二、UiAutomator2 的诞生三、UiAutomator2 的应用实践总结你是否曾经在进行 Android 应用开发时,对于如何进行全面、有效的自动化测试感到困惑?你是否想要更高效地进行 UI 测试,而不是一遍…...
)
c#抽象类(abstract)
概述: C#中的抽象类是一种特殊类型的类,它不能被实例化,只能被继承。抽象类用于提供一个共享的基类,其中定义了一些方法和属性的签名,但没有具体的实现。这些方法和属性可以在派生类中进行实现。 使用抽象类的主要目…...
语义分割实践思考记录(个人备忘录)
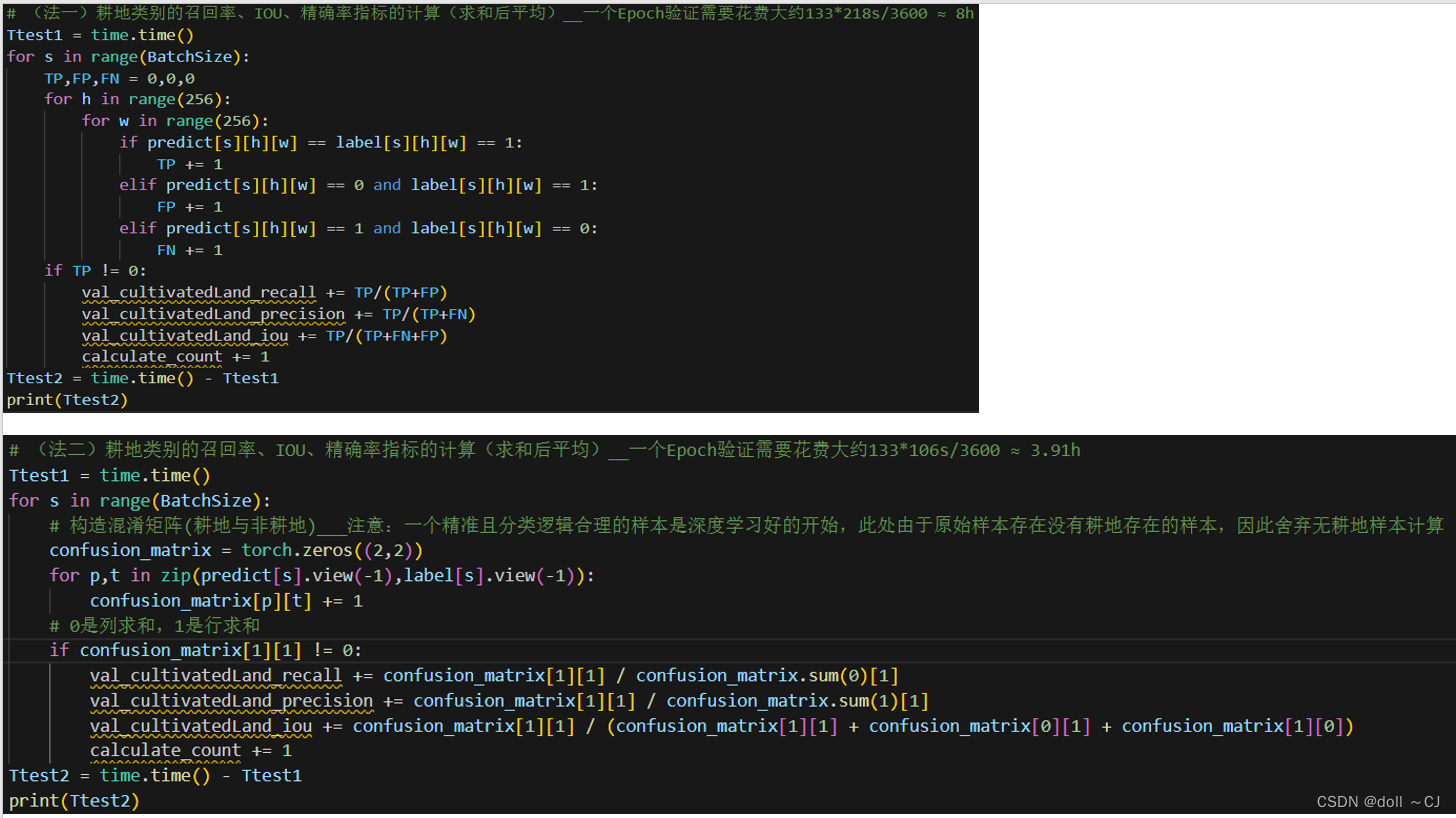
一、任务管理器、NVDIA的GPU利用率显示[1][2] 若需要在任务管理器中查看基于Pytorch框架的GPU利用率,那么,我们需要将监控面板监测内容调整为cuda。图一(左)即为英伟达命令行工具面板。 图一 英伟达GPU使用率监控 二、基于混淆矩阵…...

Zebec Protocol 成非洲利比亚展会合作伙伴,并将向第三世界国家布局
在 9 月 6 日,The Digital Asset Summit ’23(利比亚大会)在尼日利亚首度阿布贾的 NAF 会议中心举办,该会议对 Web3 领域在非洲地区的发展进行了探索,旨在推动非洲地区区块链产业的进一步发展,据悉该会议室…...

随机流-RandomAccessFile
RandomAccessFile RandomAccessFile 基本操作案例 RandomAccessFile 基本操作 案例 import java.io.*;public class TestMain09 {public static void main(String[] args) throws Exception {insert("D:\\home\\product\\aa.txt",2,"ni");}public static…...

单例和静态类
C#中的单例(Singleton)和静态类(Static Class)是两种不同的设计模式,它们各自有不同的用途和特点。 单例模式是一种设计模式,它确保一个类只有一个实例,并提供全局访问点。通常,单例…...

PMP-项目风险管理的重要性
一、什么是项目风险管理 项目风险管理旨在识别和管理未被其他项目管理过程所管理的风险。如果不妥善管理,这些风险有可能导致项目偏离计划,无法达成既定的项目目标。因此,项目风险管理的有效性直接关乎项目成功与否。 每个项目都在两个层面…...

学习的心得
文章目录 第一节课心得**学会了敲写数学公式** 第一节课心得 老师讲得非常好,我们下载了xmind,如何制作思维导图 学会了敲写数学公式 ∫ 10 20 ( x 2 − 3 x 2 ) d x \displaystyle\int_{10}^{20}(x^2-3x2)dx ∫1020(x2−3x2)dx...
Python网络爬虫中这七个li标签下面的属性值,不是固定的,怎样才能拿到他们的值呢?...
点击上方“Python爬虫与数据挖掘”,进行关注 回复“书籍”即可获赠Python从入门到进阶共10本电子书 今 日 鸡 汤 愚以为宫中之事,事无大小,悉以咨之,然后施行,必能裨补阙漏,有所广益。 大家好,我…...
白鲸开源 DataOps 平台加速数据分析和大模型构建
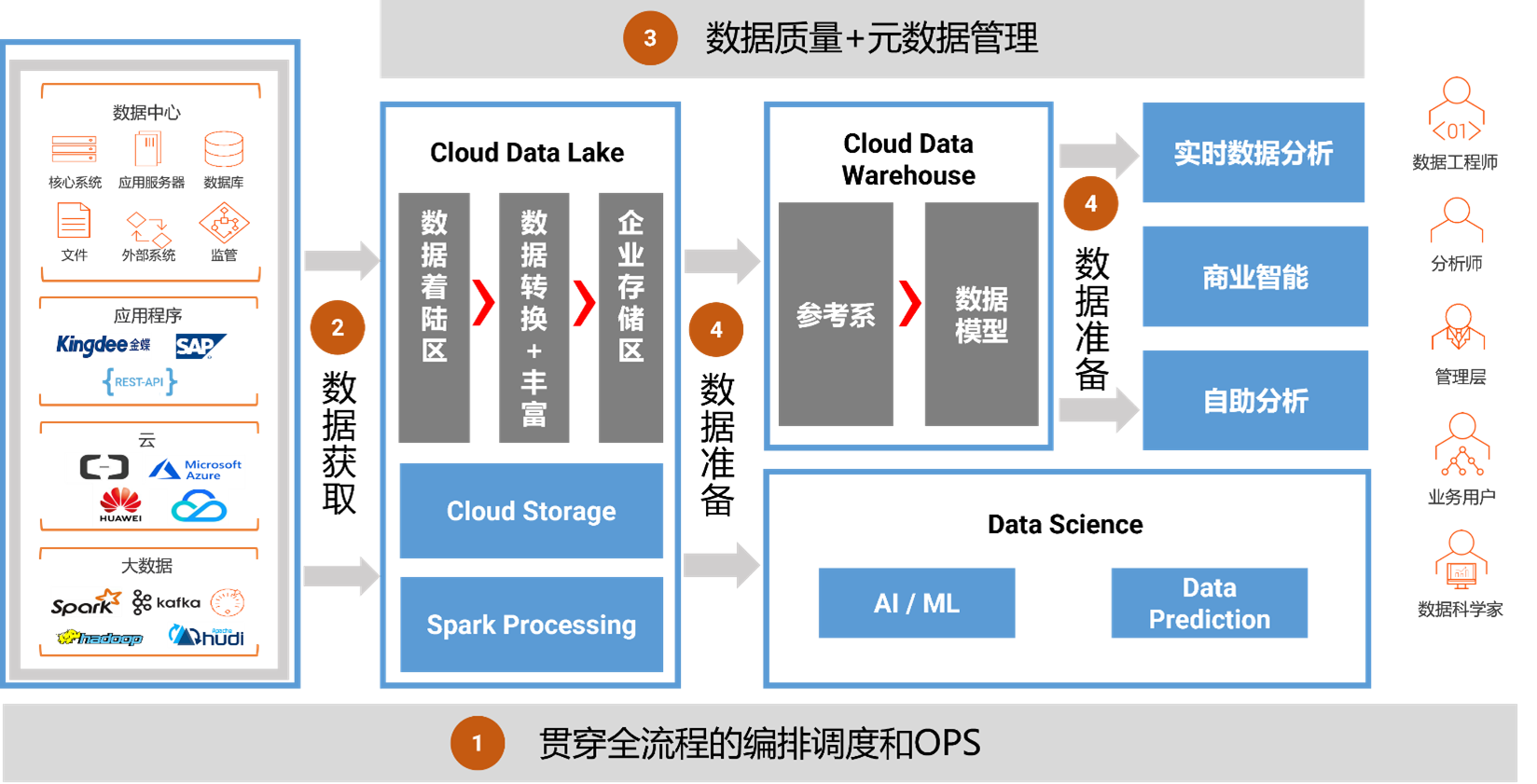
作者 | 李晨 编辑 | Debra Chen 数据准备对于推动有效的自助式分析和数据科学实践至关重要。如今,企业大都知道基于数据的决策是成功数字化转型的关键,但要做出有效的决策,只有可信的数据才能提供帮助,随着数据量和数据源的多样…...

(其他) 剑指 Offer 65. 不用加减乘除做加法 ——【Leetcode每日一题】
❓ 剑指 Offer 65. 不用加减乘除做加法 难度:简单 写一个函数,求两个整数之和,要求在函数体内不得使用 “”、“-”、“*”、“/” 四则运算符号。 示例: 输入: a 1, b 1 输出: 2 提示: a, b 均可能是负数或 0结果不会溢出 …...

在VirtualBox里跑Win10,远程桌面连不上?试试这个被忽略的虚拟机专用配置
VirtualBox虚拟机Win10远程桌面黑屏?这个隐藏配置项可能是关键在混合开发环境中,许多技术从业者习惯使用VirtualBox等虚拟化工具搭建多操作系统平台。一个常见场景是在Windows 7宿主机上运行Windows 10虚拟机,通过远程桌面进行跨系统操作。但…...

神经网络辅助可变形匹配滤波器在光通信中的应用
1. 神经网络辅助可变形匹配滤波器技术解析在光通信系统中,匹配滤波器作为信号检测的关键组件,其性能直接影响整个通信链路的可靠性。传统固定匹配滤波器基于理想信道假设设计,当面对实际系统中的带宽限制、大气湍流等复杂信道条件时ÿ…...

Linux内核性能调优实战:用ftrace揪出导致系统卡顿的369微秒元凶
Linux内核性能调优实战:用ftrace揪出导致系统卡顿的369微秒元凶当线上服务器出现偶发性性能抖动时,那种"明明有资源却跑不动"的无力感最让人抓狂。上周我们的日志集群就遇到了这样的怪事——平均延迟一切正常,但总有那么几个请求会…...

如何重塑贴吧体验:贴吧Lite带来的极致纯净浏览革新
如何重塑贴吧体验:贴吧Lite带来的极致纯净浏览革新 【免费下载链接】TiebaLite 贴吧 Lite 项目地址: https://gitcode.com/gh_mirrors/tieb/TiebaLite 厌倦了官方贴吧应用的臃肿体验和无处不在的广告干扰?贴吧Lite作为一款革命性的第三方贴吧客户…...

传统FPM项目怎么渐进式迁移到Swoole/Hyperf?
传统 FPM 项目渐进式迁移到 Swoole / Hyperf 完整方案下面是一份实战派迁移指南,不搞理想化"重写",而是一边赚钱一边换引擎。---一、先讲清楚:为啥要迁?要迁到哪?1.1 FPM 的痛点- 每个请求都要重新加载框架(Laravel 启动 30~80ms,Hyperf 启动后 0ms)- 不能保持长连…...

PINN赋能QSAR:用物理约束提升分子性质预测泛化能力
1. 项目概述:当物理规律成为神经网络的“校准尺”你有没有试过训练一个深度学习模型去预测某种新型有机分子的沸点,结果模型在训练集上误差小得惊人,一拿到实验室刚测出来的三个新样本,预测值就偏了40℃?或者用传统QSA…...

6款靠谱降AIGC软件 创作效率拉满
写论文时总是担心AI生成痕迹太重影响成绩?别慌,这里整理了6款超实用的免费论文降AIGC工具,堪称解决AI痕迹问题的"高效帮手"。它们能有效识别并去除AI生成特征,降痕效果显著,让你的论文更自然流畅,…...

OpenClaw底层揭秘:打造私有化AI Agent团队的核心原理与实战解析!
本文深入剖析了OpenClaw作为自托管多通道AI Agent网关的底层架构与核心原理。从简洁的Gateway进程设计、JSON over WebSocket的统一通信协议,到Agent循环处理消息的完整流程、多Agent路由的绑定机制,以及精细化的会话管理与独特的Markdown记忆系统&#…...

一键搞定B站视频下载:跨平台工具BilibiliDown完整使用指南
一键搞定B站视频下载:跨平台工具BilibiliDown完整使用指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirro…...

STM32H5安全连接AWS IoT:基于TrustZone与Secure Manager的物联网方案
1. 项目概述:当STM32H5遇上AWS云如果你正在用STM32H5系列高性能MCU做物联网设备开发,并且想把数据安全地送到AWS云上,那么意法半导体最近发布的这个X-CUBE-AWS-H5扩展包,绝对值得你花时间深入研究。这不仅仅是一个简单的“库文件”…...