基于uwb和IMU融合的三维空间定位算法matlab仿真
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览


2.算法运行软件版本
matlab2022a
3.部分核心程序
..........................................................................kkk = 0;
for EbN0 = EbN0_subkkkkkk = kkk + 1;for jj1 = 1:Tag_Numjj1rng(jj1);for jj = 1:num_bits%TAG to BS1delay_1 = round(time_bs_tag(1,jj1)/ts);xx1 = zeros(1,delay_1);%传播时延delay_1_1(jj,:) = [xx1 sig(1:end-length(xx1))];%UWBh_4 = uwb_channel(dist_bs_tag(1,jj1)); %信号经过信道conv_data1 = conv(delay_1_1(jj,:),h_4); UWB_chan1(jj,:) = conv_data1(1:length(sig));%TAG to BS2delay_2 = round(time_bs_tag(2,jj1)/ts);xx2 = zeros(1,delay_2);%传播时延delay_2_1(jj,:) = [xx2 sig(1:end-length(xx2))];h_2 = uwb_channel(dist_bs_tag(2,jj1));conv_data2 = conv(delay_2_1(jj,:),h_2);UWB_chan2(jj,:) = conv_data2(1:length(sig));%TAG to BS3delay_3 = round(time_bs_tag(3,jj1)/ts);xx3 = zeros(1,delay_3);%传播时延delay_3_1(jj,:) = [xx3 sig(1:end-length(xx3))];h_3 = uwb_channel(dist_bs_tag(3,jj1));conv_data3 = conv(delay_3_1(jj,:),h_3);UWB_chan3(jj,:) = conv_data3(1:length(sig));%TAG to BS4delay_4 = round(time_bs_tag(4,jj1)/ts);xx4 = zeros(1,delay_4);%传播时延delay_4_1(jj,:) = [xx4 sig(1:end-length(xx4))];h_4 = uwb_channel(dist_bs_tag(4,jj1));conv_data4 = conv(delay_4_1(jj,:), h_4);UWB_chan4(jj,:) = conv_data4(1:length(sig)); endfor jj = 1:num_bitsUWB_chan1n(jj,:) = awgn(UWB_chan1(jj,:)/max(UWB_chan1(jj,:)),EbN0,'measured');UWB_chan2n(jj,:) = awgn(UWB_chan2(jj,:)/max(UWB_chan2(jj,:)),EbN0,'measured');UWB_chan3n(jj,:) = awgn(UWB_chan3(jj,:)/max(UWB_chan3(jj,:)),EbN0,'measured');UWB_chan4n(jj,:) = awgn(UWB_chan4(jj,:)/max(UWB_chan4(jj,:)),EbN0,'measured');end%自适应前沿检测%自适应前沿检测..........................................................end
endP_est0 = [x_est0',y_est0',z_est0'];
P_est1 = [x_est1',y_est1',z_est1'];figure;
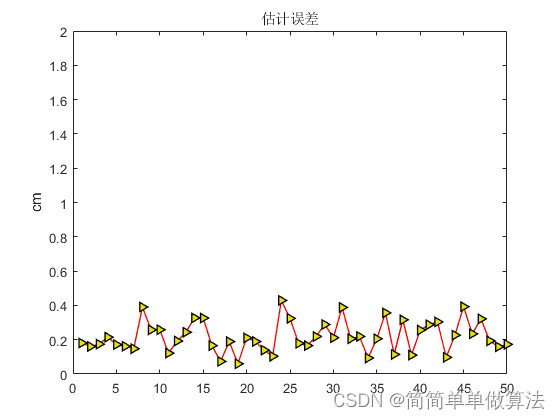
plot(toa_error0,'-r>',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);hold on
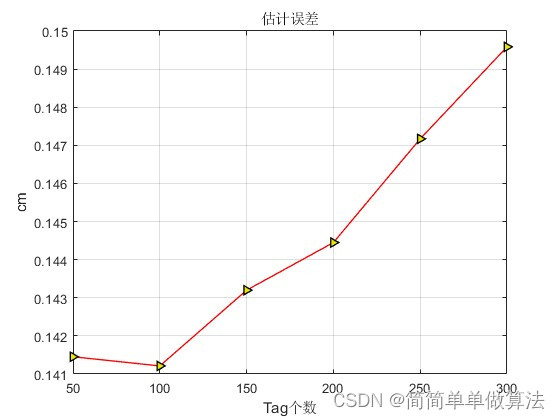
title('估计误差')axis([0,Tag_Num,0,2]);
ylabel('cm');figure
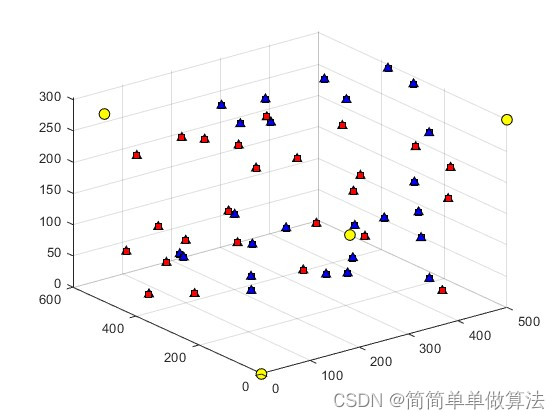
axis([0 10 0 10 0 10]);
for i=1:BS_Num plot3(BS_pos(i,1),BS_pos(i,2),BS_pos(i,3),'ko','MarkerFace','y','MarkerSize',8);hold on
end
hold on
for i=1:Tag_Num
plot3(Tag(i,1),Tag(i,2),Tag(i,3),'k^','MarkerFace','b','MarkerSize',6);
hold on
plot3(x_est1(i),y_est1(i),z_est1(i),'ks','MarkerFace','r','MarkerSize',6);
hold on
endgrid on
xlabel('cm');
ylabel('cm');
zlabel('cm');save R.mat toa_error1
36_003m4.算法理论概述
基于UWB和IMU融合的三维空间定位算法是一个结合了无线脉冲波(UWB)和惯性测量单元(IMU)各自优势的定位方法。UWB通过测量信号的传输时间来计算距离,具有精度高、抗干扰能力强等优点,但易受多径效应和环境噪声的影响。IMU则通过测量加速度和角速度来计算姿态和位置信息,具有实时性和动态性强的特点,但受限于加速度的测量误差和漂移。
通过将这两种技术进行融合,可以充分利用它们的优点来提高定位精度和稳定性。具体来说,UWB可以提供高精度的距离信息,用于计算目标的位置和姿态,而IMU可以提供实时的加速度和角速度信息,用于修正UWB的测量误差和漂移,同时提高系统的响应速度和鲁棒性。
下面介绍一种基于UWB和IMU融合的三维空间定位算法,其原理和数学公式如下:
- UWB定位
UWB采用双基站的定位方式,假设已知两个基站的位置坐标为(x1, y1, z1)和(x2, y2, z2),目标的位置坐标为(x, y, z),则可以通过以下公式计算目标到两个基站的距离差:
Δd = (x2-x1)² + (y2-y1)² + (z2-z1)² - (x-x1)² - (y-y1)² - (z-z1)²
其中,(x, y, z)为目标的位置坐标,(x1, y1, z1)和(x2, y2, z2)分别为两个基站的位置坐标。根据距离差和两个基站的坐标,可以列出两个方程,求解得到目标的位置坐标(x, y, z)。
IMU辅助
IMU可以提供实时的加速度和角速度信息,用于修正UWB的测量误差和漂移。具体来说,IMU可以提供一个加速度传感器和一个陀螺仪,分别测量加速度和角速度信息。通过对这些信息进行积分和平滑处理,可以得到目标的姿态和位置信息。
在融合过程中,可以将IMU的加速度和角速度信息作为UWB的辅助数据,对UWB的测量结果进行修正。具体来说,可以将IMU的加速度信息用于计算目标的速度和加速度,对UWB的距离测量结果进行修正,同时利用IMU的角速度信息对UWB的角度测量结果进行修正。这样可以使系统具有更高的精度和鲁棒性。
融合算法
基于UWB和IMU融合的三维空间定位算法主要包括两个阶段:数据采集阶段和数据融合阶段。在数据采集阶段,通过UWB和IMU采集目标的位置、速度、加速度、角速度等信息;在数据融合阶段,将采集到的数据进行融合处理,得到目标的最终位置、速度、加速度、角速度等信息。
解算过程可以根据需要采用最小二乘法、卡尔曼滤波等方法进行优化求解。例如,采用卡尔曼滤波算法可以将UWB和IMU的数据进行融合处理,得到更为精确的目标位置、速度、加速度、角速度等信息。具体实现过程如下:
(1)初始化状态矩阵和控制矩阵;
(2)通过UWB和IMU采集数据;
(3)利用采集到的数据计算状态矩阵和控制矩阵;
(4)根据卡尔曼滤波公式对状态矩阵和控制矩阵进行迭代计算;
(5)根据迭代结果计算目标的最终位置、速度、加速度、角速度等信息。
算法优点
基于UWB和IMU融合的三维空间定位算法具有以下优点:
(1)精度高:通过UWB和IMU的融合,可以减小环境噪声对定位精度的影响,提高算法的鲁棒性;
(2)实时性强:IMU的加速度和角速度信息可以提供实时的姿态和位置信息,对UWB的距离测量结果进行修正,缩短了系统的响应时间;
(3)可靠性高:通过数据融合技术处理多传感器数据,可以减小单一传感器的故障对系统性能的影响;
(4)扩展性强:该算法可以适用于多种场景,例如机器人定位、无人驾驶等。
5.算法完整程序工程
OOOOO
OOO
O
相关文章:
基于uwb和IMU融合的三维空间定位算法matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.部分核心程序 ..........................................................................kkk 0; for E…...
Visual Studio 2019下使用C++与Python进行混合编程——环境配置与C++调用Python API接口
前言 在vs2019下使用C与Python进行混合编程,在根源上讲,Python 本身就是一个C库,那么这里使用其中最简单的一种方法是把Python的C API来嵌入C项目中,来实现混合编程。当前的环境是,win10,IDE是vs2019,python版本是3.9,…...
STM32F4X RTC
STM32F4X RTC 什么是RTCSTM32F4X RTCSTM32F4X RTC框图STM32F4X RTC计数频率STM32F4X RTC日历STM32F4X RTC闹钟 STM32F4X RTC例程 什么是RTC RTC全程叫Real-Time Clock实时时钟,是MCU中一个用来计时的模块。RTC的一个主要作用是用来显示实时时间,就像日常…...

[git] 如何克隆仓库,进行项目撰写,并绑定自己的远程仓库
摘要:删除.git文件,才可重新绑定远程仓库。 具体步骤: 文件夹右键,进入”Git Bash Here“执行命令 1. 执行 ”git clone 仓库地址“,克隆仓库 2. 在生成的仓库中,删除 .git 文件 3. git init 初始化仓库…...
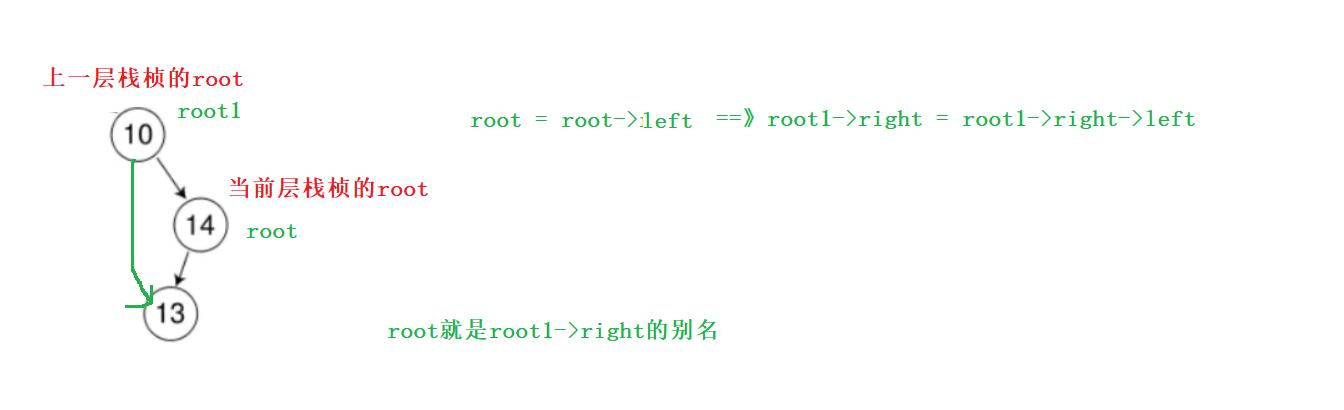
【C++】模拟实现二叉搜索树的增删查改功能
个人主页:🍝在肯德基吃麻辣烫 我的gitee:C仓库 个人专栏:C专栏 文章目录 一、二叉搜索树的Insert操作(非递归)分析过程代码求解 二、二叉搜索树的Erase操作(非递归)分析过程代码求解…...
Yolov8-pose关键点检测:模型轻量化创新 | ScConv结合c2f | CVPR2023
💡💡💡本文解决什么问题:ScConv(空间和通道重建卷积),一个即插即用的架构单元,可以可以直接用来替代各种卷积神经网络中的标准卷积。 ScConv | GFLOPs从9.6降低至9,参数量从6482kb降低至6479kb Yolov8-Pose关键点检测专栏介绍:https://blog.csdn.net/m0_637742…...
)
【洛谷 P1060】[NOIP2006 普及组] 开心的金明 题解(动态规划+01背包)
[NOIP2006 普及组] 开心的金明 题目描述 金明今天很开心,家里购置的新房就要领钥匙了,新房里有一间他自己专用的很宽敞的房间。更让他高兴的是,妈妈昨天对他说:“你的房间需要购买哪些物品,怎么布置,你说…...
)
什么是CI/CD:持续集成与持续交付?(InsCode AI 创作助手)
在现代软件开发领域,CICD(Continuous Integration and Continuous Delivery)是一种关键性的开发实践,它有助于提高软件交付的质量和效率。本文将深入探讨CICD的定义、原理和重要性,以及如何在项目中实施CICD流程。 什…...
redis 高可用
Redis 高可用 在web服务器中,高可用是指服务器可以正常访问的时间,衡量的标准是在多长时间内可以提供正常服务(99.9%、99.99%、99.999%等等)。 但是在Redis语境中,高可用的含义似乎要宽泛一些,除了保证提供…...

什么样的词条可以创建维基百科?
维基百科在国内用得比较少,有一些特殊原因,维基百科的控制权海外,目前维基百科和谷歌是一样的,在国内是无法正常访问的。但做海外推广的朋友都是知道维基百科的,小马识途营销顾问认为它在世界互联网领域的地位…...

poll epoll初学习
正是select这些缺点,才有了poll 1.I/O多路转接之poll 2.I/O多路转接之epoll 其中的struct epoll_event:...
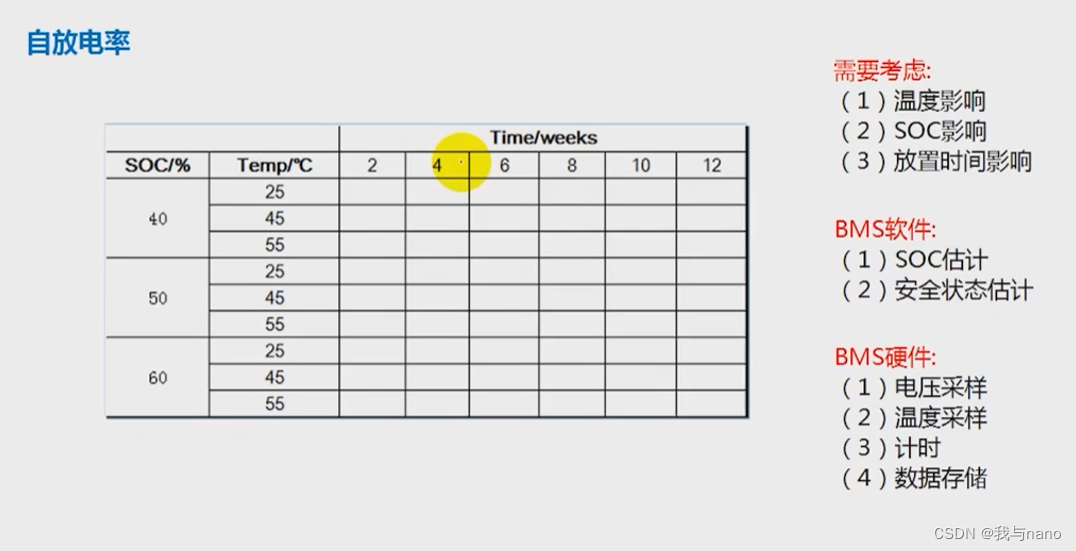
BMS电池管理系统——电芯需求数据(三)
BMS电池管理系统 文章目录 BMS电池管理系统前言一、有什么基础数据二、基础数据分析1.充放电的截至电压2.SOC-OCV关系表3.充放电电流限制表4.充放电容量特性5.自放电率 总结 前言 在新能源产业中电芯的开发也占有很大部分,下面我们就来看一下电芯的需求数据有哪些 …...
的问题)
【uniapp】关于小程序输入框聚焦、失焦(输入法占位)的问题
聊天小程序,界面带有输入框,当输入框中聚焦后,底部自动谈起输入法。此时输入框也要随之出现在输入法上方。默认情况下,输入框此时会被输入法覆盖掉。 以下是亲自实践,解决这个问题的方法: 一、小程序大概…...
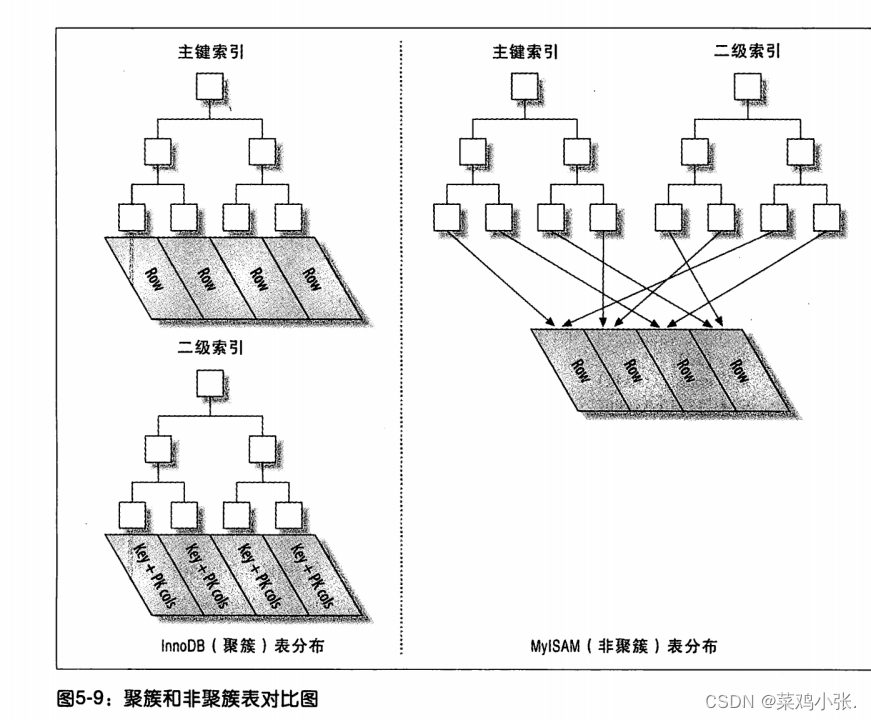
MySQL的故事——创建高性能的索引
创建高性能的索引 文章目录 创建高性能的索引一、索引基础二、索引的优点三、高性能的索引策略 一、索引基础 要理解MySQL中索引是如何工作的,最简单的方法就是去看看一本书的“索引 ”部分:如果在一本书中找到某个特定主题,一般会先看书的“…...

渗透测试漏洞原理之---【组件安全】
文章目录 1、组件安全概述1.1、常见组件1.1.1、操作系统1.1.2、Web容器1.1.3、中间件1.1.4、数据库1.1.5、开发框架1.1.6、OA系统1.1.7、其他组件 1.2、漏洞复现1.2.1 漏洞复现模板1.2.3、漏洞名称参考1.2.4、漏洞库 2、Apache2.1、Apache HTTPD2.2、Apache Shiro2.3、Apache T…...

uni-app集成mui-player
uni-app集成mui-player,仅说明集成方法,mui-player 相关配置请查看其官网 准备 在uniapp项目根目录新建hybrid目录在hybrid目录下新建html目录在html目录中新建css、js、img等目录,用于存放相关文件 集成 静态webview 在pages目录下新建v…...
算法_C++—— 两个数组的交集)
力扣(LeetCode)算法_C++—— 两个数组的交集
给定两个数组 nums1 和 nums2 ,返回 它们的交集 。输出结果中的每个元素一定是 唯一 的。我们可以 不考虑输出结果的顺序 。 示例 1: 输入:nums1 [1,2,2,1], nums2 [2,2] 输出:[2] 示例 2: 输入:nums1 …...

异步编程 - 12 异步、基于事件驱动的网络编程框架 Netty
文章目录 Netty概述Netty中的一些概念Netty的线程模型Netty Server端Netty Netty 端 TCP半包与粘包问题基于Netty与CompletableFuture实现RPC异步调用 Netty概述 Netty是一个异步、基于事件驱动的网络应用程序框架,其对Java NIO进行了封装,大大简化了TC…...
STM32 Nucleo-144开发板开箱bring-up
文章目录 1. 开篇2. 开发环境搭建2.1 下载官方例程2.2 ST-Link安装 3. STM32F446ZE demo工程3.1 STM32F446ZE简介3.2 跑个demo试一试 1. 开篇 最近做项目,用到STM32F446ZET6这款MCU,为了赶进度,前期软件需要提前开发,于是在某宝买…...
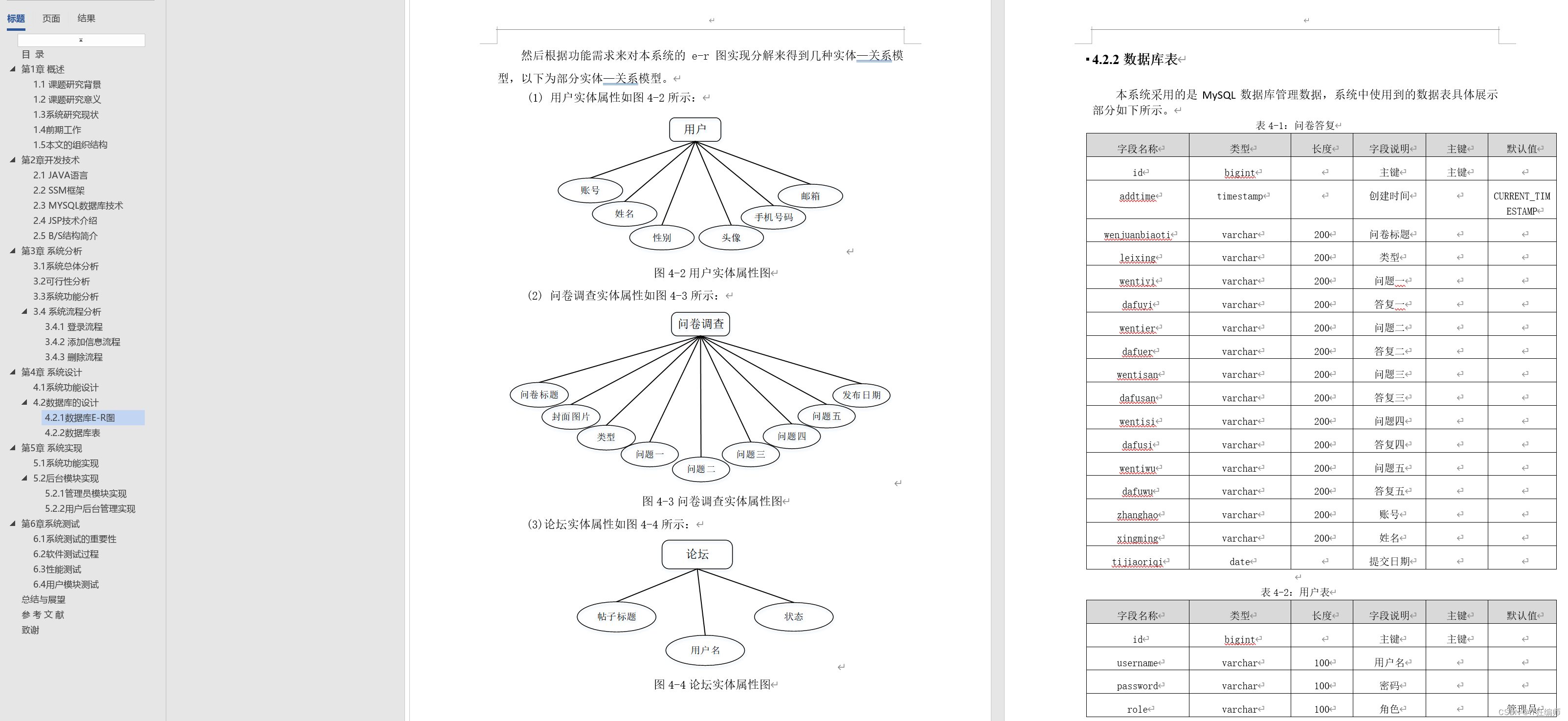
计算机毕业设计 基于SSM的问卷调查管理系统的设计与实现 Java实战项目 附源码+文档+视频讲解
博主介绍:✌从事软件开发10年之余,专注于Java技术领域、Python人工智能及数据挖掘、小程序项目开发和Android项目开发等。CSDN、掘金、华为云、InfoQ、阿里云等平台优质作者✌ 🍅文末获取源码联系🍅 👇🏻 精…...

Swift底层多线程:POSIX线程封装与安全并发实践
1. 项目概述:当Swift遇见POSIX线程如果你在Swift里用过DispatchQueue或者Thread,有没有想过它们背后到底是怎么运作的?特别是当你的应用需要处理高并发、低延迟的任务,或者需要在Linux服务器上跑一个Swift后端服务时,仅…...

别再手动编译库了!一招永久设置Vivado全局Modelsim仿真环境
永久配置Vivado与Modelsim联调环境的终极方案 每次新建FPGA工程都要重新配置仿真工具路径和编译库文件?这种重复劳动不仅浪费时间,还容易因配置不一致导致仿真失败。本文将揭示一种被多数工程师忽略的"一劳永逸"配置方案,通过系统级…...

CANN/Ascend C数学函数floorf
floorf 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.com/can…...

告别HAL库延时:在STM32F103上基于CubeMX和LL库,打造更高效的SysTick延时方案
STM32F103高效延时方案:从HAL库到LL库的SysTick实战优化 在嵌入式开发中,精确的延时控制往往是项目成败的关键因素之一。许多STM32开发者最初接触的是HAL库提供的HAL_Delay()函数,它简单易用,但随着项目复杂度提升,特别…...

大模型在软件测试中的应用:从测试用例生成到bug检测
在软件行业高速发展的今天,软件规模持续扩大、复杂度不断攀升,软件测试作为保障软件质量的关键环节,面临着前所未有的挑战。传统测试方法在应对海量需求、复杂业务逻辑以及快速迭代的开发模式时,逐渐暴露出效率低下、覆盖不全等问…...

PCB直流电阻精确估算:从基础公式到工程实践的全解析
1. 项目概述:为什么需要精确估算PCB直流电阻? 在硬件设计,尤其是电源完整性、信号完整性和热管理的世界里,PCB走线的直流电阻常常是一个被低估的关键参数。很多工程师在设计初期,注意力都集中在阻抗匹配、串扰和EMI上&…...

STM32按键状态机:从消抖到复杂事件处理的嵌入式编程范式
1. 项目概述:从“按键抖动”到“状态机思维”的跨越在嵌入式开发,尤其是基于STM32这类MCU的项目中,按键处理是几乎每个项目都绕不开的基础功能。很多新手朋友在拿到开发板,点亮第一个LED后,下一步往往就是尝试用按键来…...

EMD vs NEMD:分子动力学算热导率,新手到底该选哪个?
EMD与NEMD方法实战指南:如何为你的热导率计算选择最佳方案 在纳米材料和新型功能材料的研究中,热导率的精确计算是理解材料热输运性能的关键。面对平衡态分子动力学(EMD)和非平衡态分子动力学(NEMD)两种主流方法,许多研究者常常陷入选择困境。…...
)
保姆级教程:用Sen2Cor批量处理Sentinel-2 L1C到L2A(Win/Linux通用,附避坑清单)
遥感数据处理实战:Sen2Cor高效批量处理Sentinel-2 L1C至L2A全流程指南 当面对数百景Sentinel-2 L1C数据需要转换为L2A级别时,手动逐景处理不仅效率低下,还容易因操作失误导致数据不一致。本文将分享一套经过实际项目验证的批处理方案…...

G-Helper完整指南:3分钟掌握华硕笔记本性能优化神器
G-Helper完整指南:3分钟掌握华硕笔记本性能优化神器 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, Expe…...