摆动输入连杆夹持机构
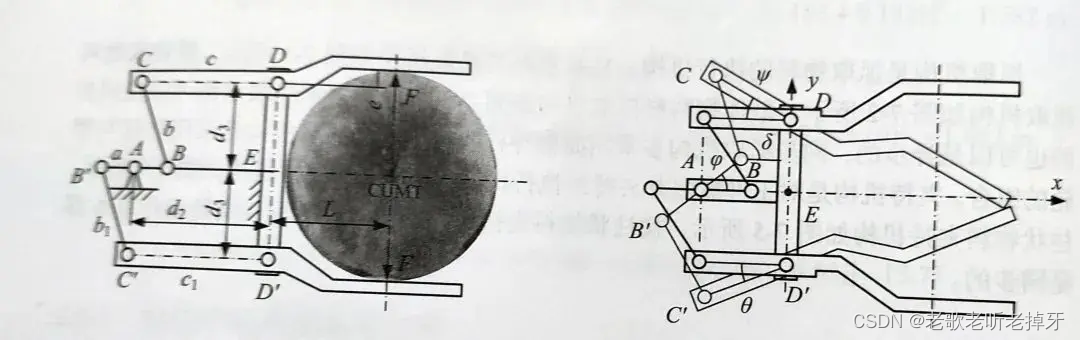
1、运动与受力分析
import sympy as sy
import numpy as np
import matplotlib.pyplot as plt
a,a1,b,b1,c,c1,d2,d3,fi,F,L,e= sy.symbols('a,a1,b,b1,c,c1,d2,d3,fi,F,L,e')
'''
A(-d2,0)
D(0,d3)
B(-d2+a*cos(fi),a*sin(fi))
C(-c*cos(pu),d3+c*sin(pu))
B'=(-d2+a*cos(fi+pi),a*sin(fi+pi))
C'=(c1*cos(theta+pi),-d3+c1*sin(theta+pi))'''
A1=2*c*(d3-a*sy.sin(fi))
B1=-2*c*(d2-a*sy.cos(fi))
C1=(d2-a*sy.cos(fi))**2+(d3-a*sy.sin(fi))**2+c**2-b**2
pu=2*sy.atan((-A1+sy.sqrt(A1**2+B1**2-C1**2))/(C1-B1))
delta=sy.atan((d3+c*sy.sin(pu)-a*sy.sin(fi))/(-c*sy.cos(pu)+d2-a*sy.cos(fi)))+sy.pi
A2=2*c1*(d3-a*sy.sin(fi))
B2=-2*c1*(d2+a*sy.cos(fi))
C2=(d2+a*sy.cos(fi))**2+(d3-a*sy.sin(fi))**2+c1**2-b1**2
theta=2*sy.atan((-A2+sy.sqrt(A2**2+B2**2-C2**2))/(C2-B2))
beta=sy.atan((d3-c1*sy.sin(theta)+a*sy.sin(fi))/(-c1*sy.cos(theta)+d2+a*sy.cos(fi)))
F23=F*(L*sy.cos(pu)+e*sy.sin(pu))/(c*sy.sin(delta+pu))
F23I=-F*(L*sy.cos(theta)+e*sy.sin(theta))/(c1*sy.sin(beta-theta))
M=F23*a*sy.sin(delta-fi)-F23I*a*(beta-fi)
pu_c=pu.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100})
delta_c=delta.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100})
fi_v=10*np.pi/180
xa=-120
ya=0
xb=-120+30*np.cos(fi_v)
yb=30*np.sin(fi_v)
Cx=-c*sy.cos(pu)
Cy=d3+c*sy.sin(pu)
xc=Cx.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100,fi:fi_v})
yc=Cy.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100,fi:fi_v})
xd=0
yd=74
B1x=-d2+a*sy.cos(fi+sy.pi)
B1y=a*sy.sin(fi+sy.pi)
C1x=c1*sy.cos(theta+sy.pi)
C1y=-d3+c1*sy.sin(theta+sy.pi)
xb1=B1x.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100,fi:fi_v})
yb1=B1y.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100,fi:fi_v})
xc1=C1x.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100,fi:fi_v})
yc1=C1y.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100,fi:fi_v})
# sy.plot(pu_c,(fi,0,80*sy.pi/180))
# sy.plot(delta_c,(fi,0,80*sy.pi/180))fig = plt.figure(figsize=(5, 4))
plt.rcParams['xtick.direction'] = 'in' # 将x周的刻度线方向设置向内
plt.rcParams['ytick.direction'] = 'in' # 将y轴的刻度方向设置向内
plt.rcParams['axes.unicode_minus']=False
# plt.rcParams['font.family'] = ["Times New Roman"] # 字体设置为Times NewRoman
plt.rcParams['font.sans-serif'] = ['SimHei']
clist = ['blue', 'red', 'green', 'black', 'darkgreen', 'lime', 'gold', 'purple', 'green', 'cyan', 'salmon', 'grey','mediumvioletred', 'darkkhaki', 'gray', 'darkcyan', 'violet', 'powderblue']
markerlst = ['o', '*', 'x', '>', '<', '^', 'D', 'd', '1', '2', '3', '4', 'o', '*', 'x', '>', '<', '^', 'D', 'd','1', '2', '3', '4', 'o', '*', 'x', '>', '<', '^', 'D', 'd', '1', '2', '3', '4']
linestylelst = ['-', '--', '-.', ':', '-', '--', '-.', ':', '-', '--', '-.', ':', '-', '--', '-.', ':', '-', '--','-.', ':', '-', '--', '-.', ':']
# 圆的基本信息
# 1.圆半径
r = 30
# 2.圆心坐标
a, b = (-120, 0.)
# ==========================================
# 参数方程画圆形
theta = np.arange(0, 2 * np.pi, 0.01)
x = a + r * np.cos(theta)
y = b + r * np.sin(theta)
plt.plot(x, y, c=clist[0])
plt.plot([xa,xb],[ya,yb],c=clist[1])
plt.plot([xb,xc],[yb,yc],c=clist[2])
plt.plot([xc,xd],[yc,yd],c=clist[3])
plt.plot([xd,xd],[-yd,yd],c=clist[4])
plt.plot([xa,xb1],[ya,yb1],c=clist[5])
plt.plot([xb1,xc1],[yb1,yc1],c=clist[6])
plt.plot([xc1,xd],[yc1,-yd],c=clist[7])
plt.show()
2、机构动画
import sympy as sy
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
a,a1,b,b1,c,c1,d2,d3,fi,F,L,e= sy.symbols('a,a1,b,b1,c,c1,d2,d3,fi,F,L,e')
'''
A(-d2,0)
D(0,d3)
B(-d2+a*cos(fi),a*sin(fi))
C(-c*cos(pu),d3+c*sin(pu))
B'=(-d2+a*cos(fi+pi),a*sin(fi+pi))
C'=(c1*cos(theta+pi),-d3+c1*sin(theta+pi))'''
A1=2*c*(d3-a*sy.sin(fi))
B1=-2*c*(d2-a*sy.cos(fi))
C1=(d2-a*sy.cos(fi))**2+(d3-a*sy.sin(fi))**2+c**2-b**2
pu=2*sy.atan((-A1+sy.sqrt(A1**2+B1**2-C1**2))/(C1-B1))
delta=sy.atan((d3+c*sy.sin(pu)-a*sy.sin(fi))/(-c*sy.cos(pu)+d2-a*sy.cos(fi)))+sy.pi
A2=2*c1*(d3-a*sy.sin(fi))
B2=-2*c1*(d2+a*sy.cos(fi))
C2=(d2+a*sy.cos(fi))**2+(d3-a*sy.sin(fi))**2+c1**2-b1**2
theta=2*sy.atan((-A2+sy.sqrt(A2**2+B2**2-C2**2))/(C2-B2))
beta=sy.atan((d3-c1*sy.sin(theta)+a*sy.sin(fi))/(-c1*sy.cos(theta)+d2+a*sy.cos(fi)))
F23=F*(L*sy.cos(pu)+e*sy.sin(pu))/(c*sy.sin(delta+pu))
F23I=-F*(L*sy.cos(theta)+e*sy.sin(theta))/(c1*sy.sin(beta-theta))
M=F23*a*sy.sin(delta-fi)-F23I*a*(beta-fi)
pu_c=pu.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100})
delta_c=delta.subs({a:30,b:79.5,b1:79.5,c:120,c1:120,d2:120,d3:74,e:15,L:100})
Cx = -c * sy.cos(pu)
Cy = d3 + c * sy.sin(pu)
B1x = -d2 + a * sy.cos(fi + sy.pi)
B1y = a * sy.sin(fi + sy.pi)
C1x = c1 * sy.cos(theta + sy.pi)
C1y = -d3 + c1 * sy.sin(theta + sy.pi)
cx = sy.lambdify(fi, Cx.subs({a: 30, b: 79.5, b1: 79.5, c: 120, c1: 120, d2: 120, d3: 74, e: 15, L: 100}), modules='numpy')
cy = sy.lambdify(fi, Cy.subs({a: 30, b: 79.5, b1: 79.5, c: 120, c1: 120, d2: 120, d3: 74, e: 15, L: 100}), modules='numpy')
b1x = sy.lambdify(fi, B1x.subs({a: 30, b: 79.5, b1: 79.5, c: 120, c1: 120, d2: 120, d3: 74, e: 15, L: 100}), modules='numpy')
b1y = sy.lambdify(fi, B1y.subs({a: 30, b: 79.5, b1: 79.5, c: 120, c1: 120, d2: 120, d3: 74, e: 15, L: 100}), modules='numpy')
c1x = sy.lambdify(fi, C1x.subs({a: 30, b: 79.5, b1: 79.5, c: 120, c1: 120, d2: 120, d3: 74, e: 15, L: 100}), modules='numpy')
c1y = sy.lambdify(fi, C1y.subs({a: 30, b: 79.5, b1: 79.5, c: 120, c1: 120, d2: 120, d3: 74, e: 15, L: 100}), modules='numpy')
# sy.plot(pu_c,(fi,0,80*sy.pi/180))
# sy.plot(delta_c,(fi,0,80*sy.pi/180))fig = plt.figure(figsize=(5, 4))
plt.rcParams['xtick.direction'] = 'in' # 将x周的刻度线方向设置向内
plt.rcParams['ytick.direction'] = 'in' # 将y轴的刻度方向设置向内
plt.rcParams['axes.unicode_minus']=False
# plt.rcParams['font.family'] = ["Times New Roman"] # 字体设置为Times NewRoman
plt.rcParams['font.sans-serif'] = ['SimHei']
clist = ['blue', 'red', 'green', 'black', 'darkgreen', 'lime', 'gold', 'purple', 'green', 'cyan', 'salmon', 'grey','mediumvioletred', 'darkkhaki', 'gray', 'darkcyan', 'violet', 'powderblue']
markerlst = ['o', '*', 'x', '>', '<', '^', 'D', 'd', '1', '2', '3', '4', 'o', '*', 'x', '>', '<', '^', 'D', 'd','1', '2', '3', '4', 'o', '*', 'x', '>', '<', '^', 'D', 'd', '1', '2', '3', '4']
linestylelst = ['-', '--', '-.', ':', '-', '--', '-.', ':', '-', '--', '-.', ':', '-', '--', '-.', ':', '-', '--','-.', ':', '-', '--', '-.', ':']# 创建绘图框架
fig, ax = plt.subplots()# 定义每帧图像的处理函数
'''
定义了一个处理函数draw_frame(),该函数根据当前的“帧数”(即第几张图)生成对应的x和y的坐标点
'''
def draw_frame(i):fi_v = i * np.pi / 180xa = -120ya = 0xb = -120 + 30 * np.cos(fi_v)yb = 30 * np.sin(fi_v)xc = cx(fi_v)yc = cy(fi_v)xd = 0yd = 74xb1 = b1x(fi_v)yb1 = b1y(fi_v)xc1 = c1x(fi_v)yc1 = c1y(fi_v)# 绘制图形ax.clear()r = 30# 2.圆心坐标x0, y0 = (-120, 0.)# ==========================================# 参数方程画圆形theta = np.arange(0, 2 * np.pi, 0.01)x = x0 + r * np.cos(theta)y = y0 + r * np.sin(theta)ax.plot(x, y, c=clist[0])ax.plot([xa, xb], [ya, yb], c=clist[1])ax.plot([xb, xc], [yb, yc], c=clist[2])ax.plot([xc, xd], [yc, yd], c=clist[3])ax.plot([xd, xd], [-yd, yd], c=clist[4])ax.plot([xa, xb1], [ya, yb1], c=clist[5])ax.plot([xb1, xc1], [yb1, yc1], c=clist[6])ax.plot([xc1, xd], [yc1, -yd], c=clist[7])ax.axis("equal")# 固定X轴、Y轴的范围ax.set_ylim(ymin=-150, ymax=150)ax.set_xlim(xmin=-160, xmax=10)plt.tight_layout()# 生成动画对象
'''
FuncAnimation()函数生成了一个动画对象anim,该对象会在循环中调用draw_frame()函数,并以50毫秒的时间间隔循环展示100帧图像
'''
anim = FuncAnimation(fig, draw_frame, frames=80, interval=50)
# 使用pillow将动画保存为GIF图片
anim.save('finger.gif', writer='pillow')
相关文章:
摆动输入连杆夹持机构
1、运动与受力分析 import sympy as sy import numpy as np import matplotlib.pyplot as plt a,a1,b,b1,c,c1,d2,d3,fi,F,L,e sy.symbols(a,a1,b,b1,c,c1,d2,d3,fi,F,L,e)A(-d2,0) D(0,d3) B(-d2a*cos(fi),a*sin(fi)) C(-c*cos(pu),d3c*sin(pu)) B(-d2a*cos(fipi),a*sin(fipi…...

C++——类与对象(下篇)
前言 前面已经介绍了类与对象(上),类与对象(中)的两篇文章,下面是类与对象的最后一些重要知识点的介绍和总结。 目录 再谈构造函数Static成员友元内部类匿名对象拷贝对象时的一些编译器优化再次理解封装…...

stm32 freeRTOS lwip TCP快速发送,内存泄露问题
现象1: 发送缓慢,tcp_write之后要等200多ms才能过发送出去,而且粘包严重。 解决办法 tcp_write之后,立马调用tcp_output ,tcp就会立马发送。 tcp_write tcp_output 现象2: 持续快速发送和接受TCP数据出…...

Ei、Scopus双检索 | 2024年第三届人工智能与机器学习前沿国际会议(FAIML 2024)
会议简介 Brief Introduction 2024年第三届人工智能与机器学习前沿国际会议(FAIML 2024) 会议时间:2024年4月26日-28日 召开地点:中国宜昌 大会官网:www.faiml.org FAIML 2024将围绕“人工智能与机器学习”的最新研究领域而展开,为…...

win10环境下搭建QT+opencv
安装步骤 源码编译安装免编译/cmake安装vs2022环境安装 问题解决 modules/core/CMakeFiles/opencv_core.dir/vs_version.rc.obj] Error 1 PS D:\Qt\Tools\mingw730_64\bin> D:\Qt\Tools\mingw730_64\bin\windres.exe D:\Opencv\opencv\opencv\build\modules\core\vs_ver…...
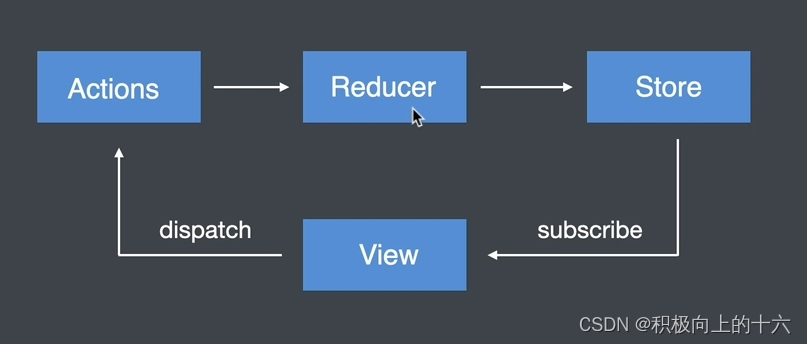
React16、18 使用 Redux
Redux 核心 Redux 介绍 Redux 是javaScript 状态容器,提供可预测化的状态管理 Redux 工作流程 Actions:对象,描述对状态进行怎样的操作 Reducer:函数,操作状态并返回新的状态 Store:存储状态的容器&am…...

【Python】Python运算符/部分函数对应的双下划线魔法方法
先说下Python版本:【Python 3.7.8】 以下用图片表格展示,一是防扒,二是没精力改成md格式。 还有就是内容肯定没有完全包含(而且也很难做到),像是__reduce__与py自带模块pickle有关(pickle用于对象序列化/反序列化)、sys.getsizeo…...
Macs Fan Control 1.5.16 Pro for mac风扇调节软件
Macs Fan Control是一款专门为 Mac 用户设计的软件,它可以帮助用户控制和监控 Mac 设备的风扇速度和温度。这款软件允许用户手动调整风扇速度,以提高设备的散热效果,减少过热造成的风险。 Macs Fan Control 可以在菜单栏上显示当前系统温度和…...

某技术公司技术二面面试题总结
存在一个单体架构的服务,怎么拆分为微服务的架构 将一个单体应用程序拆分成微服务架构是一个复杂的过程,需要深入的计划和实施。以下是一般的步骤和策略,可以帮助您成功地将单体应用程序拆分为微服务: 理解单体应用程序ÿ…...

初试小程序轮播组件
文章目录 一、轮播组件(一)swiper组件1、功能描述2、属性说明 (二)swiper-item组件1、功能描述2、属性说明 二、案例演示(一)运行效果(二)实现步骤1、创建小程序项目2、准备图片素材…...

Centos7 Yum安装PHP7.2
1、安装源 安装php72w,是需要配置额外的yum源地址的,否则会报错不能找到相关软件包。 php高版本的yum源地址,有两部分,其中一部分是epel-release,另外一部分来自webtatic。如果跳过epel-release的话,安装…...

2020年09月 C/C++(三级)真题解析#中国电子学会#全国青少年软件编程等级考试
C/C编程(1~8级)全部真题・点这里 第1题:铺砖 对于一个2行N列的走道。现在用12,22的砖去铺满。问有多少种不同的方式。 时间限制:3000 内存限制:131072 输入 整个测试有多组数据,请做到文件底结束。每行给出…...

30天入门Python(基础篇)——第2天:Python安装(保姆级)与IDE的认识与选择+详细安装教程
文章目录 专栏导读上一节课回顾1、Python解释器的安装查看各个版本的Python解释器①、ok,双击安装②、这里我们选择【自定义】安装, 下面的【将Python添加在环境变量】大家一定要打个勾③、点击【Next】进行下一步④、这里不建议安装在C盘, 点击【Browse】我在F盘创…...
软件测试/测试开发丨ChatGPT:带你进入智能对话的新时代
简介 人工智能时代来临 我们正处于AI的iPhone时刻。——黄仁勋(英伟达CEO) ChatGPT 好得有点可怕了,我们距离危险的强人工智能不远了。——马斯克(Tesla/SpaceX/Twitter CEO) 以上的内容说明我们现在正处于一个技术大…...
logback/log4j基本配置和标签详解
什么是logback logback 继承自 log4j,它建立在有十年工业经验的日志系统之上。它比其它所有的日志系统更快并且更小,包含了许多独特并且有用的特性。 logback.xml 首先直接上配置,我在项目过程中发现一些同时遇到需要logback文件的时候就去…...
雅思 《九分达人》阅读练习(二)
目录 雅思阅读练习 《九分达人》test3 paragraph3 1.单词含义要记准确,敏感度要上来。 2.找准定位,之后理解句子大致含义。 说说关于判断题的做题方法 关于“承认”有哪些单词 同替词汇 think 可以用什么其他单词来替换 单词 一些疑问 I have…...
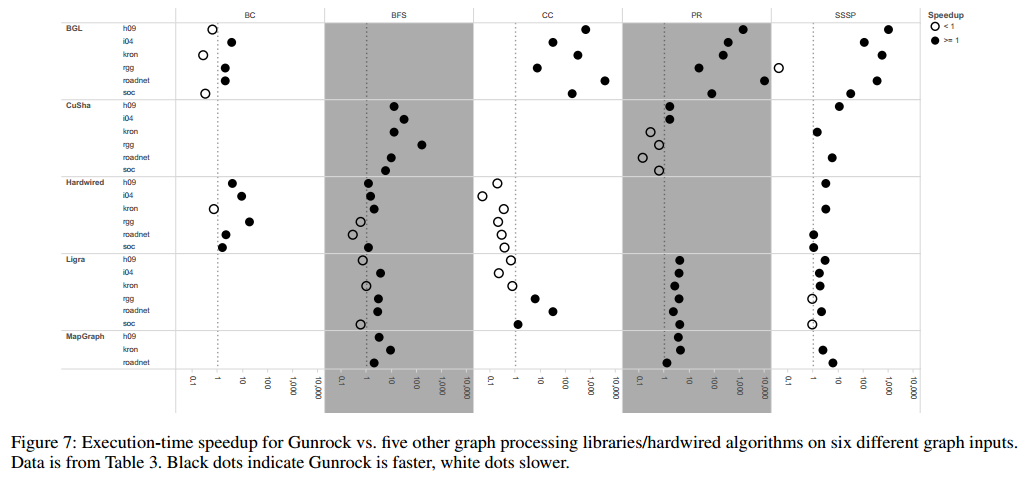
[论文笔记] Gunrock: A High-Performance Graph Processing Library on the GPU
Gunrock: A High-Performance Graph Processing Library on the GPU Gunrock: GPU 上的高性能图处理库 [Paper] [Code] PPoPP’16 摘要 Gunrock, 针对 GPU 的高层次批量同步图处理系统. 采用了一种新方法抽象 GPU 图分析: 实现了以数据为中心(data-centric)的抽象, 以在结点…...

A Guide to PriorityQueue
原文链接:https://blog.csdn.net/ohwang/article/details/116934308 PriorityQueue 又叫 优先队列 注意1: PriorityQueue是用数组实现,数组大小可以动态增加,容量无限。 优先队列采用的是堆排序(默认为最小堆ÿ…...
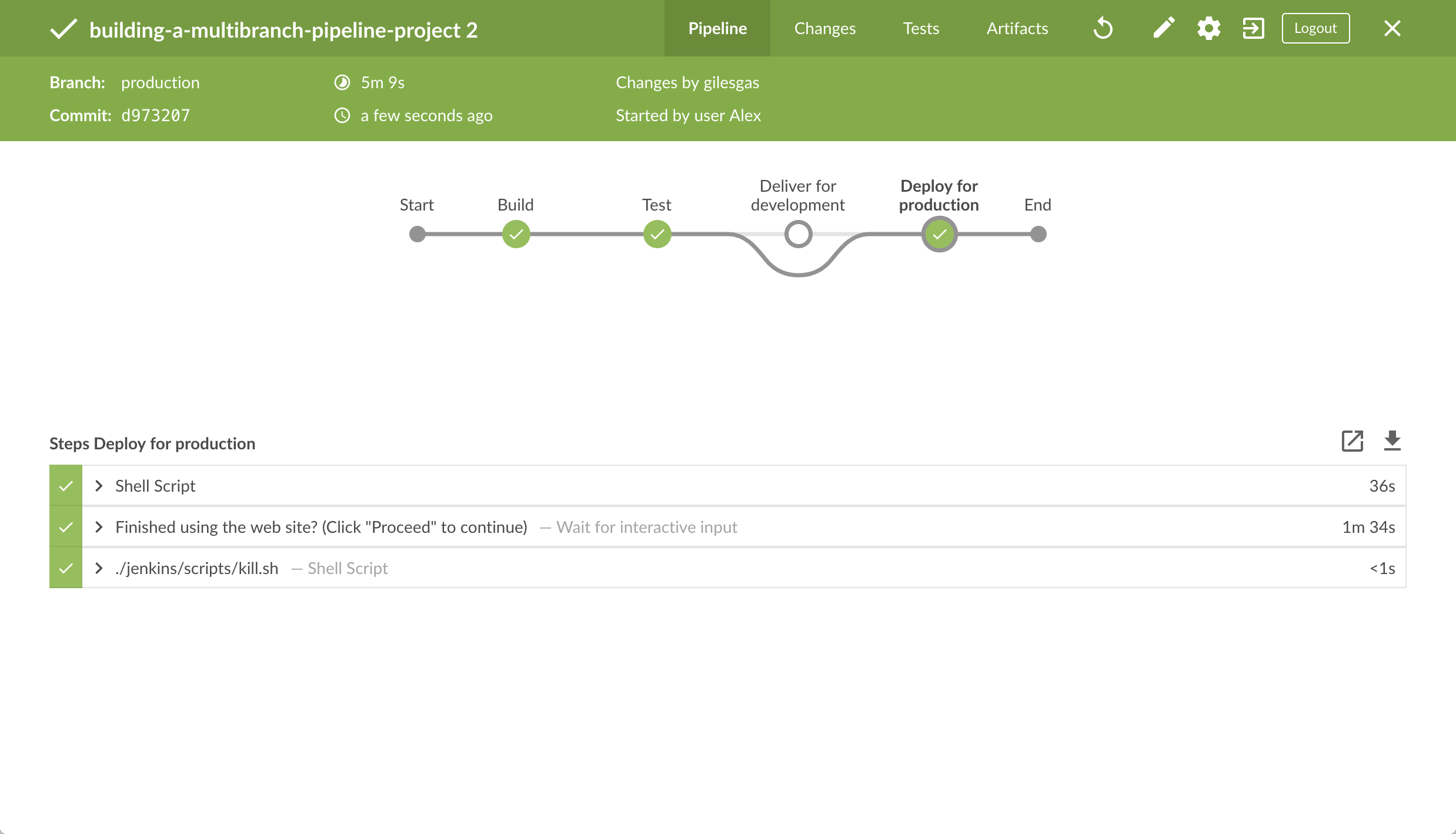
Jenkins教程—构建多分支流水线项目
本教程向你展示如何使用Jenkins协调一个用 Node Package Manager (npm) 管理的简单 Node.js 和 React 项目, 并同时 为开发和产品环境交付不同的结果。 在开始本教程之前,建议你前往 教程概览 页面,并至少完成一个 介绍教程, 从而…...
)
【vxe-table】@enter.keyup.native实现在列表中回车光标向右移动聚焦及vxe-table的一些方法的使用(具体实现+踩坑篇)
需求: vxe-table表格 1、新增的时候,vxe-table第一行的第一个输入框聚焦 2、输入完成后,按回车,自动跳到同一行的下一个输入框 3、当在同一行的最后一个输入框输入完成后,按回车跳回第一个输入框并选中状态且复选框为选…...
)
自动驾驶开发必备:Vscode+Git双神器组合的隐藏技巧(含分支管理秘籍)
自动驾驶开发必备:VscodeGit双神器组合的隐藏技巧(含分支管理秘籍) 在自动驾驶开发领域,高效的代码管理和协作流程是项目成功的关键因素。随着代码库规模不断扩大,团队规模持续增长,传统的版本控制方式往往…...

PyAutoGUI实战:给你的旧软件做个‘外挂’,自动完成游戏日常或软件测试
PyAutoGUI实战:用Python打造智能自动化助手,解放双手提升效率 在数字时代,重复性任务如同无形的枷锁,消耗着我们的时间和精力。想象一下,每天打开电脑后,你需要重复点击十几个相同的按钮,填写相…...

模拟前端电路设计:高精度信号处理核心技术解析
1. 模拟前端电路设计概述 模拟前端电路是连接真实世界与数字系统的关键桥梁,它负责将传感器采集的微弱模拟信号进行调理、放大和转换,使其能够被后续的数字系统正确处理。作为一名从事硬件设计十余年的工程师,我处理过从医疗设备到工业控制的…...

万象视界灵坛实操案例:博物馆数字藏品图像‘青铜器’‘唐三彩’‘水墨画’三级语义识别
万象视界灵坛实操案例:博物馆数字藏品图像青铜器唐三彩水墨画三级语义识别 1. 项目背景与价值 在博物馆数字化进程中,如何准确识别和分类各类文物图像是一个重要课题。传统基于标签的分类系统往往难以捕捉文物深层的艺术风格和文化内涵。 万象视界灵坛…...

拯救者笔记本性能优化终极指南:如何用Lenovo Legion Toolkit释放硬件潜力
拯救者笔记本性能优化终极指南:如何用Lenovo Legion Toolkit释放硬件潜力 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/LenovoLegionTool…...

Nunchaku-flux-1-dev模型服务监控:使用Node.js搭建性能仪表盘
Nunchaku-flux-1-dev模型服务监控:使用Node.js搭建性能仪表盘 你是不是也遇到过这种情况?自己部署的AI模型服务,用着用着突然就变慢了,或者干脆没响应了,用户反馈过来才知道出了问题。等到发现的时候,可能…...
)
爬虫自动化(DrissionPage)
目录 ?一.介绍: 下载DrissionPage,还是我们熟悉的pip: 环境准备: ?二.基本代码: 它对于的导包和类使用: 窗口的设置: 和获取的页面的滑动: 3.进一步认识DrissionPage: 浏览器可以多开…...

实战构建企业技能评估系统:基于快马平台实现skill-vetter全流程解决方案
实战构建企业技能评估系统:基于快马平台实现skill-vetter全流程解决方案 最近在帮公司搭建内部技能认证系统时,发现传统线下考试方式存在效率低、数据难沉淀的问题。于是尝试用InsCode(快马)平台开发了一套skill-vetter系统,整个过程比想象中…...

当相机位姿已知:利用COLMAP从稀疏到稠密重建的实战指南
1. 环境准备与数据格式转换 在开始COLMAP重建之前,我们需要确保环境配置正确,并完成相机位姿数据的格式转换。COLMAP支持Windows、Linux和macOS系统,但为了获得最佳性能,建议使用配备NVIDIA显卡的机器,并安装CUDA加速版…...

量子机器学习在医疗影像中的技术迷思与测试验证陷阱
当量子计算遭遇医学影像近年来,"量子赋能医疗影像"成为热门概念,宣称通过量子算法(如QSVM、量子卷积)可大幅提升病灶识别精度和图像重建效率。然而,作为软件测试从业者,我们需警惕技术炒作背后的…...