计算机视觉领域经典模型汇总(2023.09.08
一、RCNN系列
1、RCNN
RCNN是用于目标检测的经典方法,其核心思想是将目标检测任务分解为两个主要步骤:候选区域生成和目标分类。
- 候选区域生成:RCNN的第一步是生成可能包含目标的候选区域,RCNN使用传统的计算机视觉技术,特别是选择性搜索(Selective Search)算法,这是一种Region Proposal区域提议方法,它根据图像中的纹理、颜色和形状等信息来生成潜在的候选区域。选择性搜索生成的候选区域通常数千个,因此需要对这些区域进行裁剪和调整,以使它们具有相同的大小和纵横比。
- 特征提取:对于每个候选区域,RCNN使用深度卷积神经网络(通常是在ImageNet数据集上预训练的AlexNet)来提取特征。这些特征用于表示每个候选区域的内容。RCNN通过将每个候选区域的图像块调整为固定大小,然后通过卷积神经网络进行前向传播,得到一个固定维度的特征向量。
- 目标分类:对于每个候选区域,RCNN将提取的特征向量输入到一个支持向量机(SVM)分类器中共,以确定该区域是否包含感兴趣的目标物体。RCNN还对每个目标物体的类别进行分类,使用不同的SVM分类器来表示不同的类别。每个分类器被训练为将包含目标物体的候选区域与不包含目标物体的区域进行区分。
- 边界框回归:为了提高目标的位置精度,RCNN还使用了一个回归器来微调每个候选区域的边界框,这个回归器被训练为预测候选区域与实际目标边界框之间的差异。
- 训练:RCNN的训练分为两个阶段,预训练和微调。①预训练阶段,卷积神经网络(Alexnet)在大规模图像分类任务上进行与训练,以获得有用的特征提取器。②微调阶段,使用标注的目标检测数据对整个RCNN模型进行微调,包括SVM分类器和边界框回归器。
- 优点和缺点:①优点:RCNN在目标检测上取得了很好的性能,特别是在大规模目标检测数据集上。它能够处理不同大小和形状的目标,并且可以适应多类别目标检测。②缺点:RCNN是一个复杂的多阶段模型,难以实现端到端的训练,后续版本(如Fast R-CNN和Faster R-CNN)针对这些缺点进行了改进,提高了速度和性能。
2、Fast R-CNN(Fast Region-based Convolutional Neural Network)
Fast R-CNN是在RCNN和Selective Search基础上提出的改进方法,主要创新是将整个目标检测流程集成到一个卷积神经网络(CNN)种,从而显著提高了速度和性能。
- 候选区域生成:不同于RCNN中使用选择性搜索,FastRCNN使用卷积网络直接从输入图像中生成候选区域。使用一个称为Region Proposal Network(RPN)的子网络,RPN可以高效地生成多尺度和多形状地候选区域,这些区域被称为锚框(Anchor Boxes)。
- 特征提取:FastRCNN使用卷积神经网络来提取每个候选区域的特征。这些区域特征被送入网络中以进行目标分类和边界框回归。使用卷积层和ROI(Region of Interest)池化层来提取固定维度的特征向量
- 目标分类和边界框回归:对于每个候选区域,Fast R-CNN使用两个并行的全连接层,一个用于目标分类(哪个类别?)和用于边界框回归(目标位置)。分类层使用softmax来预测目标的类别概率,而回归层用于微调候选区域的边界框。
- 训练:Fast R-CNN进行端到端的训练,可以同时优化RPN、目标分类和边界框回归的损失函数。训练数据包括正样本(包含目标的锚框)、负样本(不包含目标的锚框)以及他们的标签。
3、Faster R-CNN(Faster Region-based Convolutional Neural Network)
Faster R-CNN 进一步改进了 Fast R-CNN,将目标检测模型的速度提高到了一个新的水平,同时保持了很高的准确性。
- 候选区域生成:Faster R-CNN引入了一个完全卷积网络,作为RPN,用来生成候选区域。RPN是一个端到端可训练的网络,可以生成候选区域。
- 特征提取:与Fast-RCNN类似,Faster R-CNN 使用卷积神经网络来提取候选区域的特征。
- 目标分类和边界框回归:Faster R-CNN 与 Fast R-CNN 具有相似的目标分类和边界框回归步骤。
- 训练:Faster R-CNN 通过联合训练 RPN 和检测网络(包括目标分类和边界框回归)来优化整个系统。整个模型可以一次性生成候选区域并执行目标检测,从而提高了速度。
二、yolo系列
计算机视觉领域,目标检测是一个十分重要的研究主题, 广泛应用在人脸识别、车牌识别、安防、智慧交通、自动驾驶等领域。主要经典算法有:YOLO
1、YOLOv1
以往的二阶段检测算法,如Faster-RCNN,在检测时需要经过两步:边框回归和softmax分类。由于大量预选框的生成,该方法检测精度较高,但实时性较差。YOLO之父Joseph Redmon提出了通过直接回归的方式获取目标检测的具体位置信息和类别分类信息。极大的降低了计算量,显著提升了检测的速度。达到了45FPS(Fast YOLO版本达到了155FPS)。
- 思路:①将输入图片缩放至448x448x3大小;②经过卷积网络backbone提取特征图;③把提取到的特征图送入两层全连接层,最终输出7x7x30大小的特征图。更进一步讲,就是将输入的图片整体划分为SxS的网格(例如7x7),物体中心落在哪一个格子中,那么该各自就负责该物体的检测,每一个格子预测B个边框,输出SxS(B*5+C)。对于YOLOv1而言,常用的是7x7的网格划分,预测2个边框,输出7x7x30,30个通道包含每个类别的概率+边框置信度+边框位置信息。


- 网络结构:骨干网络是GoogleNet网络,24个卷积层+2个全连接层。使用7x7卷积。
- 优势与不足:①优点:与二阶段检测算法相比,利用直接回归的方式,大大缩小了计算量,提升了运行速度。②不足:每一个网格仅有两个预测框,当存在多物体密集挨着或者小目标的时候,检测效果不好。
2、YOLOv2
与YOLOv1相比,v2做了三点改变①更换骨干网络;②引入PassThrough;③借鉴了二阶段检测的思想,添加了预选框。
- 思路:将图片输入到darknet19网络中提取特征图,然后输出目标框类别信息和位置信息。
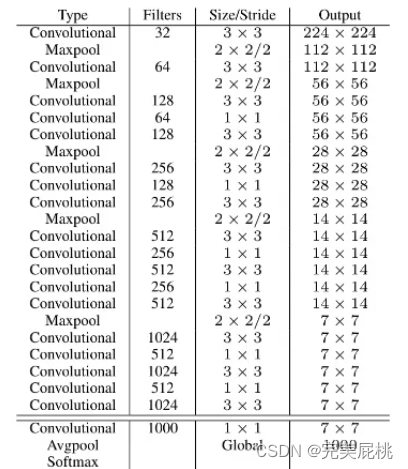
- 网络结构:骨干网络为darknet19,如下图所示针对1000类别的分类任务,只不过对于检测任务而言,需要使用3x3卷积(输出通道1024)取代上表中最后的卷积层,再添加Passthrough操作后,进行输出。已不再使用7x7这样的大卷积核:

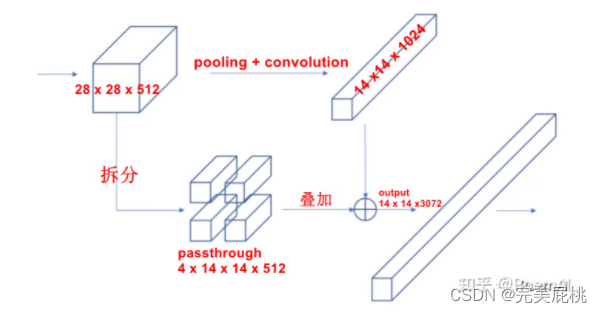
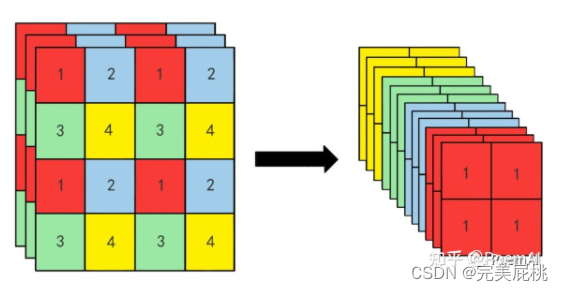
- 技巧1: PassThrough操作-该方法将28x28x512调整为14x14x2048,后续v5版本中的Focus操作类似该操作。将生成的14x14x2048与原始的14x14x1024进行concat操作。
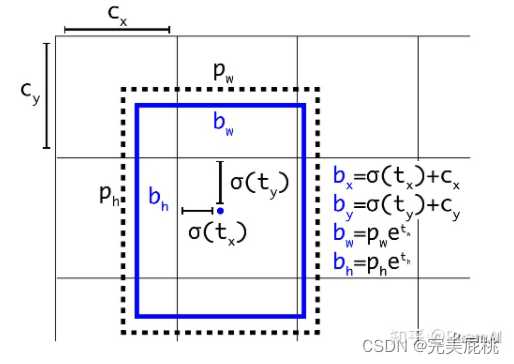
- 技巧2:引入anchor,调整位置预测为偏移预测借鉴了Faster-RCNN的思想,引入了anchor,将目标框的位置预测由直接预测坐标调整为偏移量预测,大大降低了预测难度,提升了预测准确性。
- 优势与不足:①优势:利用passthrough操作对高低层语义信息进行融合,在一定程度上增强了小目标的检测能力。采用小卷积核代替7x7的大卷积核,降低了计算量,同时改进的位置偏移策略降低了检测目标框的难度。② 尚未采用残差网络结构,且当存在多物体密集挨着的时候或者小目标的时候,检测效果有待提升。
3、YOLOv3(晚点接着更这条....现在得去看数据分析题咯...555555555555
相关文章:
计算机视觉领域经典模型汇总(2023.09.08
一、RCNN系列 1、RCNN RCNN是用于目标检测的经典方法,其核心思想是将目标检测任务分解为两个主要步骤:候选区域生成和目标分类。 候选区域生成:RCNN的第一步是生成可能包含目标的候选区域,RCNN使用传统的计算机视觉技术&#x…...
华为云云耀云服务器L实例评测|在 Centos Docker 中使用Nginx部署Vue项目
目录 前言 项目构建 使用CentOS部署 安装Nginx 配置Nginx 项目启动 访问重定向 使用Docker部署 编写docker文件 dockerfile nginx dockercompose 项目启动 前言 本期我们测试在云耀云服务器L实例中分别演示如何在 系统镜像Centos 与 应用镜像 Docker 中使用Nginx…...
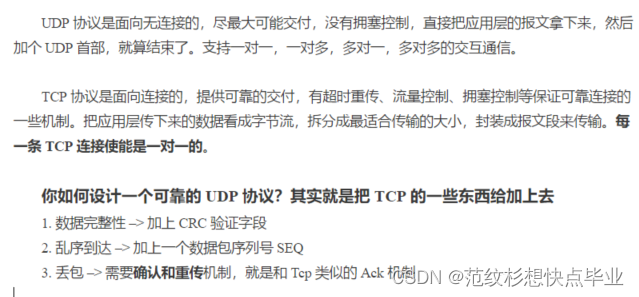
高频知识汇总 |【计算机网络】面试题汇总(万字长文通俗易懂)
我之前也已经在写了好几篇高频知识点汇总,简要介绍一下,有需要的同学可以点进去先收藏,之后用到时可以看一看。如果有帮助的话,希望大家给个赞,给个收藏!有疑问的也可以在评论区留言讨论,能帮的…...

6.Flask-APScheduler定时任务框架
1.下载安装 pip install flask-apscheduler2.基本使用 from flask import Flask from flask_apscheduler import APScheduler app Flask(__name__) aps APScheduler() # 配置定时任务 scheduler { id: job1, func: scheduler:task, # 指向一个Python函数或方法…...

电脑入门:路由器访问控制列表基础知识
路由器访问控制列表基础知识 1、什么是访问控制列表? 访问控制列表在Cisco IOS软件中是一个可选机制,可以配置成过滤器来控制数据包,以决定该数据包是继续向前传递到它的目的地还是丢弃。 …...

目标检测笔记(十四): 使用YOLOv8完成对图像的目标检测任务(从数据准备到训练测试部署的完整流程)
文章目录 一、目标检测介绍二、YOLOv8介绍三、源码获取四、环境搭建4.1 环境检测 五、数据集准备六、 模型训练6.1 方式一6.2 方式二6.3 针对其他任务 七、模型验证八、模型测试九、模型转换9.1 转onnx9.1.1 方式一 9.2 转tensorRT9.2.1 trtexec9.2.2 代码转换9.2.3 推理代码 一…...

windows系统edge浏览器退出账户后还能免密登录的解决方式
edge浏览器明明退出登录了,还能不用输密码一键点击就能登录; 这是因为微软的煞笔产品经理用脚后跟想出来的方案。 解决方案: 去设置里的账号管理,注销自己的微软账号登录;如果你发现自己并没有登录,那么看…...
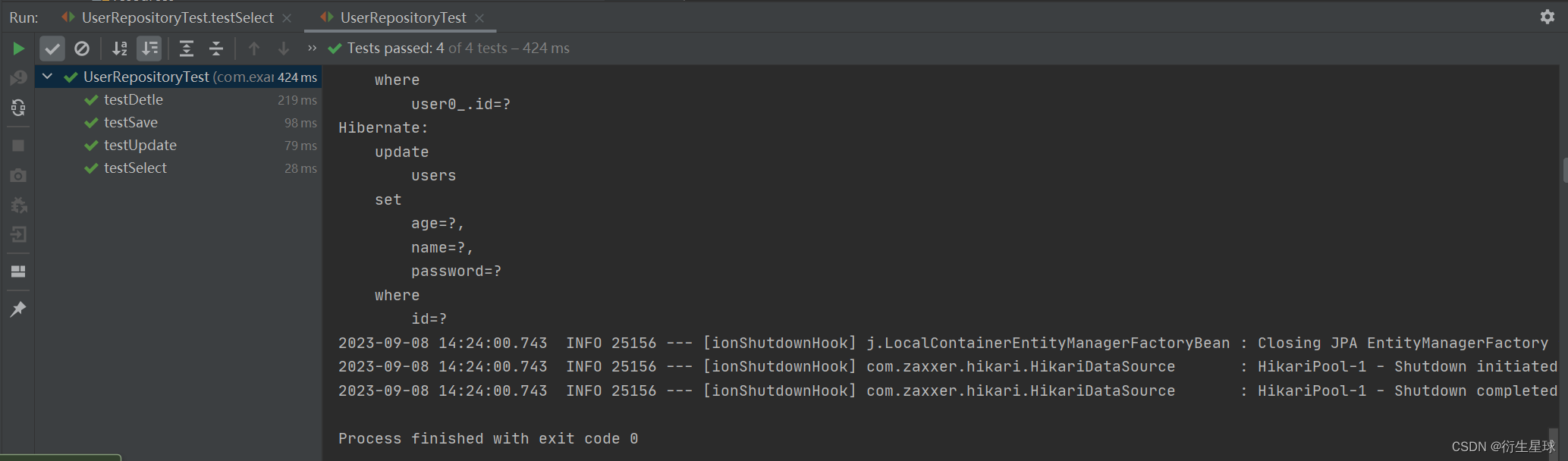
在Spring Boot项目中使用JPA
1.集成Spring Data JPA Spring Boot提供了启动器spring-boot-starter-data-jpa,只需要添加启动器(Starters)就能实现在项目中使用JPA。下面一步一步演示集成Spring Data JPA所需的配置。 步骤01 添加JPA依赖。 首先创建新的Spring Boot项目…...

探讨Socks5代理IP在跨境电商与网络游戏中的网络安全应用
随着全球互联网的迅猛发展,跨境电商和在线游戏成为了跨国公司和游戏开发商的新战场。然而,与此同时,网络安全问题也日益突出。本文将探讨如何利用Socks5代理IP来增强跨境电商和网络游戏的网络安全,保障数据传输的隐私和安全性。 …...

T检验的前提条件|独立性|方差齐性|随机抽样
T检验是一种用于比较两组数据均值是否存在显著差异的统计方法,但在进行T检验之前,有一些前提条件需要满足,以确保结果的准确性和可靠性。这些前提条件包括: 正态性:T检验要求数据在每个组内都服从正态分布。正态性可以…...
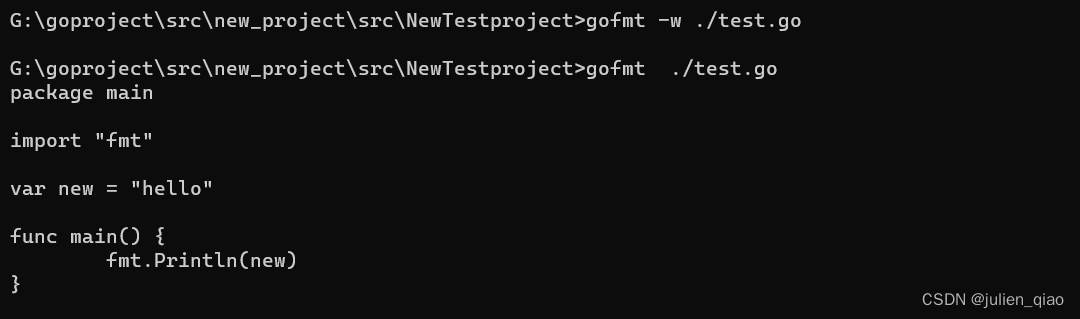
【GO语言基础】变量常量
系列文章目录 【Go语言学习】ide安装与配置 【GO语言基础】前言 【GO语言基础】变量常量 【GO语言基础】数据类型 【GO语言基础】运算符 文章目录 系列文章目录常量和枚举变量声明全局变量声明大小写敏感 总结 常量和枚举 使用const关键字声明常量,并为每个常量提…...

C++QT day3
1> 自行封装一个栈的类,包含私有成员属性:栈的数组、记录栈顶的变量 成员函数完成:构造函数、析构函数、拷贝构造函数、入栈、出栈、清空栈、判空、判满、获取栈顶元素、求栈的大小 2> 自行封装一个循环顺序队列的类,包含…...
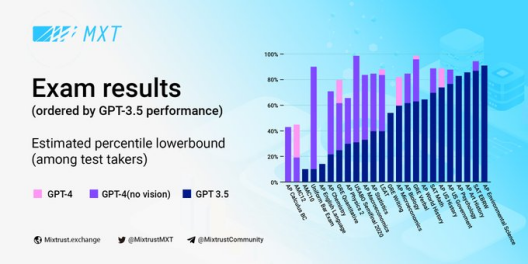
AI时代的较量,MixTrust能否略胜一筹?
人工智能的能力正在迅速接近人类,而在许多细分领域,已经超越了人类。虽然短期内这个突破是否会导致人工通用智能(AGI)还不清楚,但我们现在有的模型被训练成在数字交互中完美地模仿高能人类。尽管AGI仍不确定࿰…...
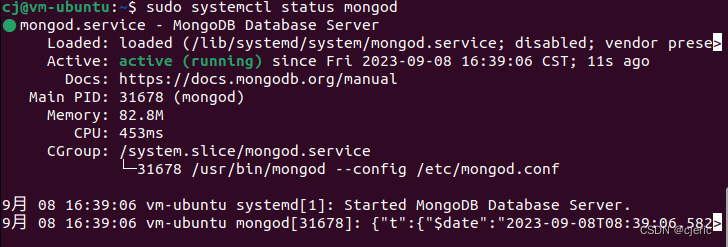
Ubuntu22.04 安装 MongoDB 7.0
稍微查了一些文章发现普遍比较过时。有的是使用旧版本的Ubuntu,或者安装的旧版本的MongoDB。英语可以的朋友可以移步Install MongoDB Community Edition on Ubuntu — MongoDB Manual,按照官方安装文档操作。伸手党或者英语略差的朋友可以按照本文一步步…...

【日志技术——Logback日志框架】
日志技术 1.引出 我们通常展示信息使用的是输出语句,但它有弊端,只能在控制台展示信息,不能灵活的指定日志输出的位置(文件,数据库),想加入或取消日志,需要修改源代码 2.日志技术…...

mysql存储过程和函数
存储过程语法 设置变量: set dogNum 1002; 1、无参的存储过程 delimiter $ CREATE PROCEDURE 存储过程名() begin 存储过程体 end $; 2、有参数的存储过程 delimiter $ CREATE PROCEDURE 存储过程名(in|out|inout 参数名1 参数类型,参数名2 参数类型……...

【HDFS】Hadoop-RPC:客户端侧通过Client.Connection#sendRpcRequest方法发送RPC序列化数据
org.apache.hadoop.ipc.Client.Connection#sendRpcRequest: 这个方法是客户端侧向服务端发送RPC请求的地方。调用点是Client#call方法过来的。 此方法代码注释里描述了一个细节:这个向服务端发送RPC请求数据的过程并不是由Connection线程发送的,而是其他的线程(sendParams…...

Java基于 SpringBoot 的车辆充电桩系统
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝30W,Csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 文章目录 1、效果演示效果图技术栈 2、 前言介绍(完整源码请私聊)3、主要技术3.4.1 …...

excel表导出
dto:查询条件所在的类 GetMapping(value "/downloadProject")ApiOperation("导出台账数据")AnonymousAccesspublic void queryDownload(Dto dto, HttpServletResponse response) throws IOException, ParseException {service.queryDownload(byPageDto, re…...

YOLOv8 快速入门
前言 本文是 YOLOv8 入门指南(大佬请绕过),将会详细讲解安装,配置,训练,验证,预测等过程 YOLOv8 官网:ultralytics/ultralytics: NEW - YOLOv8 🚀 in PyTorch > ONN…...

Android定时开关机的5种实现方式对比:哪种最适合你的设备?
Android定时开关机技术全景解析:从系统API到硬件层控制的深度实践 在智能设备管理领域,定时开关机功能一直是工业控制、物联网终端和定制化Android设备的核心需求之一。想象一下,你正在部署一批智能售货机,需要在营业时间自动唤醒…...

菊水PBZ40电源协议详解:从‘*IDN?’到波形设置,一份给硬件测试新人的避坑指南
菊水PBZ40电源协议实战手册:从基础指令到复杂波形配置的工程指南 第一次接触菊水PBZ40可编程电源时,面对满屏的协议指令和参数配置,不少硬件测试工程师都会感到无从下手。这台看似简单的设备,实际上隐藏着许多需要特别注意的细节…...

从理论到实践:基于状态观测器的闭环系统设计与MATLAB仿真
1. 当状态看不见时,我们如何控制一个系统? 想象一下你在驾驶一辆汽车,但仪表盘全部失灵——看不到车速、转速、油量,甚至连方向盘转角都不知道。这时候如果要保持车道,你会怎么做?这就是控制工程中经典的状…...
LumiPixel Canvas Quest集成Vue.js:打造动态人像画廊管理后台
LumiPixel Canvas Quest集成Vue.js:打造动态人像画廊管理后台 1. 项目背景与需求分析 在数字内容创作领域,AI生成人像正成为设计师和内容创作者的重要工具。传统人工绘制方式耗时费力,而直接使用AI生成工具又缺乏系统化管理。我们团队最近用…...
LumiPixel Canvas Quest教育应用:生成历史人物或文学角色形象辅助教学
LumiPixel Canvas Quest教育应用:生成历史人物或文学角色形象辅助教学 1. 教学场景中的视觉化挑战 历史课本上密密麻麻的文字描述和语文教材中抽象的人物描写,常常让学生难以形成直观印象。当讲到"秦始皇统一六国"时,学生脑海中可…...

【计算机架构】RISC-V:开源精简指令集如何重塑未来芯片设计
1. RISC-V:开源指令集的革命性突破 我第一次接触RISC-V是在2014年,当时这个开源指令集还只是学术界的一个研究项目。谁能想到短短几年后,它已经成为改变芯片设计行业的颠覆性力量。与ARM、x86等传统商业架构不同,RISC-V最吸引我的…...
)
SPM12实战:手把手教你搞定fMRI数据预处理(从时间矫正到空间平滑)
SPM12实战:零基础入门fMRI数据预处理全流程解析 第一次接触功能磁共振成像(fMRI)数据分析时,面对SPM12复杂的界面和晦涩的术语,很多新手都会感到无从下手。这篇文章将带你从零开始,用最直观的方式掌握fMRI数…...

告别兼容性烦恼,让老旧应用在现代浏览器中“无缝”运行
在数字化转型的浪潮中,企业的技术架构往往承载着历史的痕迹。当我们享受着现代浏览器带来的极速体验与丰富扩展时,一个不容忽视的挑战正悄然影响着员工的工作效率与IT运维的平静——那就是“传统浏览器支持”问题。这并非一个遥不可及的技术概念…...

StructBERT中文相似度模型保姆级教学:如何用TSNE可视化高维句向量空间分布
StructBERT中文相似度模型保姆级教学:如何用TSNE可视化高维句向量空间分布 1. 引言:为什么需要可视化句向量? 当你使用StructBERT这样的模型计算句子相似度时,你得到的只是一个0到1之间的数字。这个数字告诉你两个句子“有多像”…...
)
GRACE/GRACE-FO数据下载全攻略:从零开始搞定三大机构数据源(含最新FTP地址)
GRACE/GRACE-FO数据获取与处理全流程指南:2024年三大机构最新数据源解析 对于刚接触地球物理学和气候研究领域的研究人员来说,获取和处理GRACE/GRACE-FO卫星数据往往面临诸多挑战。本文将系统介绍2024年三大主流数据机构(JPL、GFZ、CSR&…...