【PythonRS】基于GDAL修改栅格数据的DN值
遥感工作者离不开栅格数据,有时候我们可能需要修改栅格数据的值,但ENVI和ArcGIS中并没有直接修改DN值的工具,只有栅格计算器、Band math这些工具去计算整个波段的值,或者Edit Classification Image工具可以修改ENVI分类后的像元值,但这个工具只对分类格式有效,博主整不明白怎么把单波段数据转为分类格式,所以这些工具都无法满足我们的需求。
今天跟大家分享一下如何使用Python的GDAL库将栅格数据中特定的DN值修改成我们想要的。
一、安装库
import os
import numpy as np
from osgeo import gdal二、读取栅格数据信息
这一步可有可无,只是让你了解一下栅格数据的基本信息,如投影信息、长度、宽度等。
def Get_data(filepath):ds = gdal.Open(filepath) # 打开数据集datasetds_width = ds.RasterXSize # 获取数据宽度ds_height = ds.RasterYSize # 获取数据高度ds_bands = ds.RasterCount # 获取波段数ds_geo = ds.GetGeoTransform() # 获取仿射地理变换参数ds_prj = ds.GetProjection() # 获取投影信息print("影像的宽度为:" + str(ds_width))print("影像的高度为:" + str(ds_height))print("仿射地理变换参数为:" + str(ds_geo))print("投影坐标系为:" + str(ds_prj))# data = ds.ReadAsArray(0, 0, ds_width, ds_height) # 以数组的形式读取整个数据集三、修改DN值
我这里写的函数,只适用于修改单波段的栅格影像,如果需要修改多波段就自己加一个循环。其实原理都一样,就是将波段读成数组,然后通过索引读取第几行第几列像元的值,然后判断这个值是否为你想要修改的值,如果是,就将其赋予新的值。
def Modify_value(filepath, out_path, original, target):print("-----正在进行DN值的修改-----")ds = gdal.Open(filepath) # 打开数据集datasetds_width = ds.RasterXSize # 获取数据宽度ds_height = ds.RasterYSize # 获取数据高度ds_geo = ds.GetGeoTransform() # 获取仿射地理变换参数ds_prj = ds.GetProjection() # 获取投影信息array_band = ds.GetRasterBand(1).ReadAsArray(0, 0, ds_width, ds_height).astype(np.float64)# 读取第一个波段全部for row in range(0, ds_height):# 循环当前波段的行for col in range(0, ds_width):# 循环当前波段的列if array_band[row][col] == original:# 判断第row行第col列的DN值是否为需要修改的值array_band[row][col] = target# 修改该值else:continuedriver = gdal.GetDriverByName('GTiff') # 载入数据驱动,用于存储内存中的数组ds_result = driver.Create(out_path, ds_width, ds_height, bands=1, eType=gdal.GDT_Float64)# 创建一个数组,宽高为原始尺寸ds_result.SetGeoTransform(ds_geo) # 导入仿射地理变换参数ds_result.SetProjection(ds_prj) # 导入投影信息ds_result.GetRasterBand(1).SetNoDataValue(0) # 将无效值设为0ds_result.GetRasterBand(1).WriteArray(array_band) # 将结果写入数组del ds_result# 删除内存中的结果,否则结果不会写入图像中print("计算完成")四、完整代码
# -*- coding: utf-8 -*-
"""
@Time : 2023/9/8 8:51
@Auth : RS迷途小书童
@File :Modifying Raster Data DN Values.py
@IDE :PyCharm
@Purpose:修改栅格数据DN值
"""
import os
import numpy as np
from osgeo import gdaldef Get_data(filepath):ds = gdal.Open(filepath) # 打开数据集datasetds_width = ds.RasterXSize # 获取数据宽度ds_height = ds.RasterYSize # 获取数据高度ds_bands = ds.RasterCount # 获取波段数ds_geo = ds.GetGeoTransform() # 获取仿射地理变换参数ds_prj = ds.GetProjection() # 获取投影信息print("影像的宽度为:" + str(ds_width))print("影像的高度为:" + str(ds_height))print("仿射地理变换参数为:" + str(ds_geo))print("投影坐标系为:" + str(ds_prj))# data = ds.ReadAsArray(0, 0, ds_width, ds_height) # 以数组的形式读取整个数据集def Modify_value(filepath, out_path, original, target):print("-----正在进行DN值的修改-----")ds = gdal.Open(filepath) # 打开数据集datasetds_width = ds.RasterXSize # 获取数据宽度ds_height = ds.RasterYSize # 获取数据高度ds_geo = ds.GetGeoTransform() # 获取仿射地理变换参数ds_prj = ds.GetProjection() # 获取投影信息array_band = ds.GetRasterBand(1).ReadAsArray(0, 0, ds_width, ds_height).astype(np.float64)# 读取第一个波段全部for row in range(0, ds_height):# 循环当前波段的行for col in range(0, ds_width):# 循环当前波段的列if array_band[row][col] == original:# 判断第row行第col列的DN值是否为需要修改的值array_band[row][col] = target# 修改该值else:continuedriver = gdal.GetDriverByName('GTiff') # 载入数据驱动,用于存储内存中的数组ds_result = driver.Create(out_path, ds_width, ds_height, bands=1, eType=gdal.GDT_Float64)# 创建一个数组,宽高为原始尺寸ds_result.SetGeoTransform(ds_geo) # 导入仿射地理变换参数ds_result.SetProjection(ds_prj) # 导入投影信息ds_result.GetRasterBand(1).SetNoDataValue(0) # 将无效值设为0ds_result.GetRasterBand(1).WriteArray(array_band) # 将结果写入数组del ds_result# 删除内存中的结果,否则结果不会写入图像中print("计算完成")if __name__ == "__main__":os.environ['PROJ_LIB'] = 'G:/Anaconda/envs/pyDL/Lib/site-packages/osgeo/data/proj'os.environ['GDAL_DATA'] = 'G:/Anaconda/envs/pyDL/Lib/site-packages/osgeo/data'# 添加PROJ至环境变量,消除警告file_path = r"B:\1m_xiugai.tif" # 输入的栅格数据路径out_path1 = r"B:\1m_xiugai1.tif" # 导出的文件路径data1 = int(input("请输入需要修改的DN值:"))data2 = int(input("请输入目标DN值 :"))Get_data(file_path) # 执行函数,获取影像基本信息print("\n")print("--------------DN值修改--------------")Modify_value(file_path, out_path1, data1, data2) # 执行函数,修改DN值
今天的分享就到这里了,大家需要注意的是,我这段代码只适用于单波段数据且想要修改的值只有一种时,如你想要将所有DN值等于1的像元全部改成0,就可以直接使用我的点吗改数据路径,然后再输入1和0就可以了(因为我的任务就是将分类数据(DN值为0,1,2,3,4)中分错的部分改成正确的)。不要问为什么不使用工具,因为我手里的分类数据不是ENVI支持的分类格式(泪目)。
如果大家在学习Python或者RS时有什么问题,可以随时留言交流!如果大家对批量处理有兴趣同样可以留言给博主,博主会分享相关代码以供学习!
相关文章:

【PythonRS】基于GDAL修改栅格数据的DN值
遥感工作者离不开栅格数据,有时候我们可能需要修改栅格数据的值,但ENVI和ArcGIS中并没有直接修改DN值的工具,只有栅格计算器、Band math这些工具去计算整个波段的值,或者Edit Classification Image工具可以修改ENVI分类后的像元值…...
mysql课堂笔记 mac
目录 启动mac上的mysql 进入mysql mac windows 创建数据库 创建表 修改字段数据类型 修改字段名 增加字段 删除字段 启动mac上的mysql sudo /usr/local/mysql/support-files/mysql.server start 直接输入你的开机密码即可。 编辑 进入mysql mac sudo /usr/local…...

2023年数学建模国赛A 定日镜场的优化设计思路分析
构建以新能源为主体的新型电力系统,是我国实现“碳达峰”“碳中和”目标的一项重要措施。塔式太阳能光热发电是一种低碳环保的新型清洁能源技术[1]。定日镜是塔式太阳能光热发电站(以下简称塔式电站)收集太阳能的基本组件,其底座由…...

【QT】QMessageBox消息框的使用(16)
在实际项目中,弹出消息框是一个很常见的操作,包含错误信息提示、警告信息提示、关于信息提示、还包括判断信息选择等操作,那么今天通过这一节来好好了解下消息框的使用方法。 一.环境配置 1.python 3.7.8 可直接进入官网下载安装…...
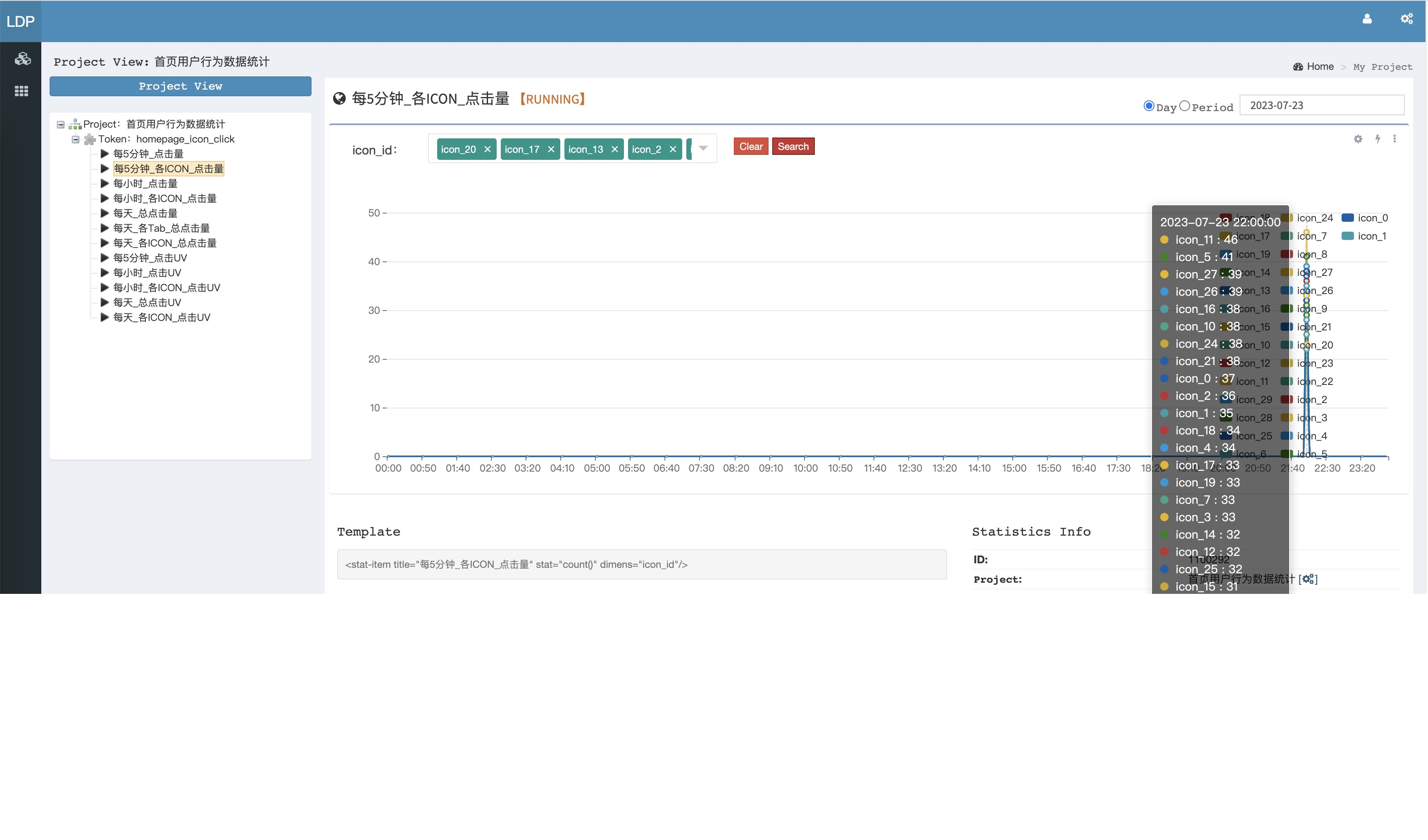
XL-LightHouse 与 Flink 和 ClickHouse 流式大数据统计系统
一个Flink任务只能并行处理一个或少数几个数据流,而XL-LightHouse一个任务可以并行处理数万个、几十万个数据流; 一个Flink任务只能实现一个或少数几个数据指标,而XL-LightHouse单个任务就能支撑大批量、数以万计的数据指标。 1、XL-LightHo…...

【postgresql 基础入门】创建数据库的方法,存储位置,决定自己的数据的访问用户和范围
创建数据库 专栏内容: postgresql内核源码分析手写数据库toadb并发编程 开源贡献: toadb开源库 个人主页:我的主页 管理社区:开源数据库 座右铭:天行健,君子以自强不息;地势坤,君…...

科技云报道:AI时代,对构建云安全提出了哪些新要求?
科技云报道原创。 随着企业上云的提速,一系列云安全问题也逐渐暴露出来,云安全问题得到重视,市场不断扩大。 Gartner 发布“2022 年中国 ICT 技术成熟度曲线”显示,云安全已处于技术萌芽期高点,预期在2-5年内有望达到…...

如何让 Llama2、通义千问开源大语言模型快速跑在函数计算上?
:::info 本文是“在Serverless平台上构建AIGC应用”系列文章的第一篇文章。 ::: 前言 随着ChatGPT 以及 Stable Diffusion,Midjourney 这些新生代 AIGC 应用的兴起,围绕AIGC应用的相关开发变得越来越广泛,有呈井喷之势,从长远看这波应用的爆…...
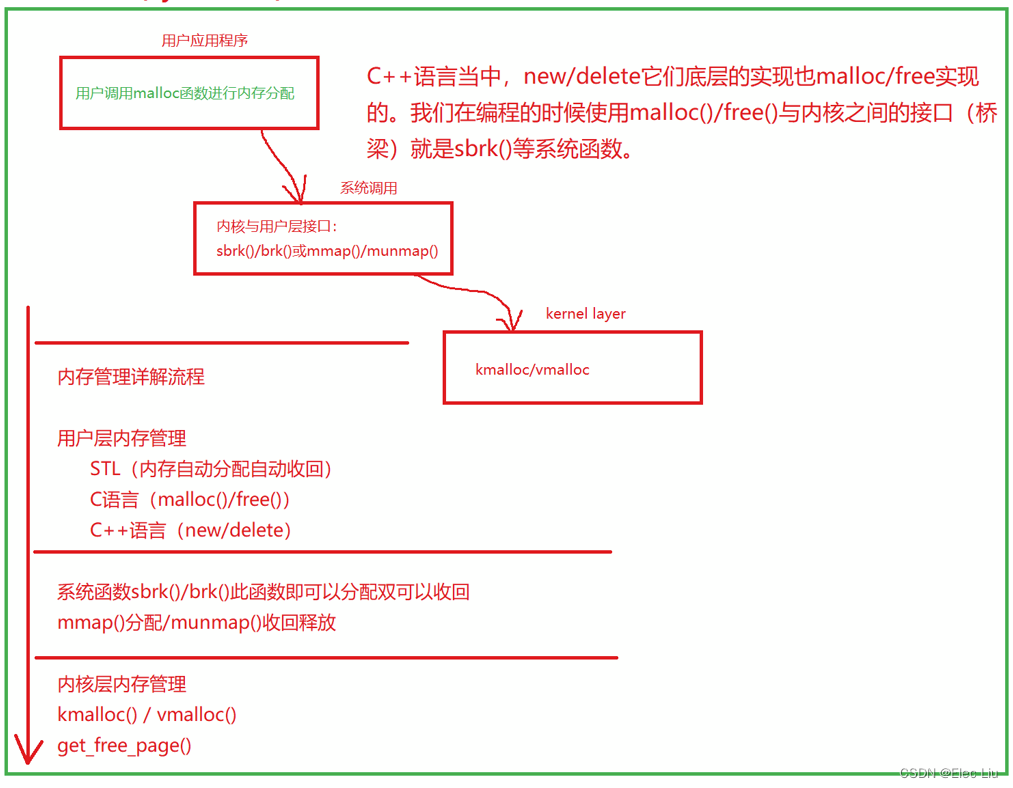
Linux内核源码分析 (B.2)虚拟地址空间布局架构
Linux内核源码分析 (B.2)虚拟地址空间布局架构 文章目录 Linux内核源码分析 (B.2)虚拟地址空间布局架构一、Linux内核整体架构及子系统二、Linux内核内存管理架构 一、Linux内核整体架构及子系统 Linux内核只是操作系统当中的一部分,对下管理系统所有硬件设备&…...
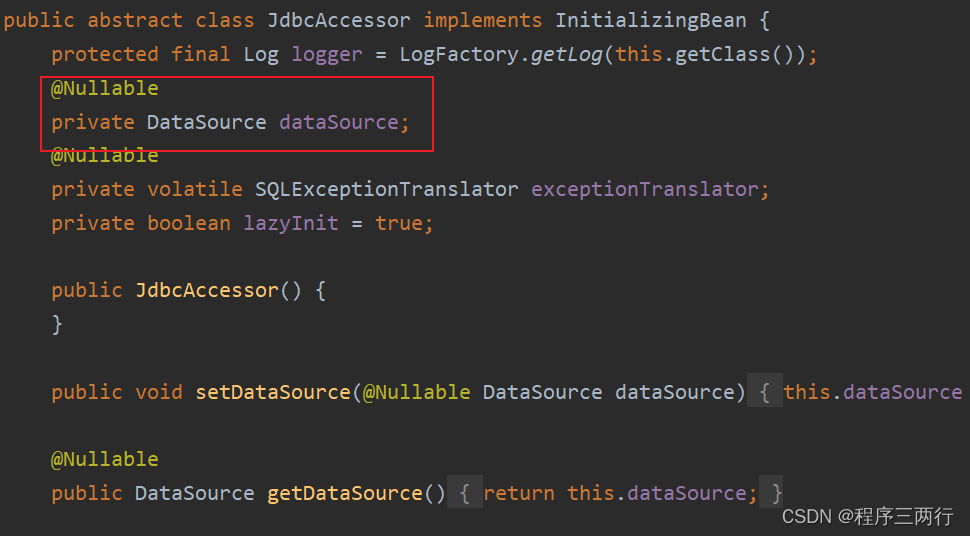
Spring系列文章:Spring使用JdbcTemplate
一、简介 JdbcTemplate是Spring提供的⼀个JDBC模板类,是对JDBC的封装,简化JDBC代码。 当然,你也可以不⽤,可以让Spring集成其它的ORM框架,例如:MyBatis、Hibernate等。 第一步:引入依赖 <d…...

[matlab]cvx安装后测试代码
测试环境: windows10 x64 matlab2023a 代码来自官方网站:CVX: Matlab Software for Disciplined Convex Programming | CVX Research, Inc. m 20; n 10; p 4; A randn(m,n); b randn(m,1); C randn(p,n); d randn(p,1); e rand; cvx_beginva…...

【css】margin:auot什么情况下失效
margin:auto只对块级元素有效果,并且在正常文档流margin:automargin:0 auto,css默认在正常文档流里面margin-top和margin-bottom是0 为什么margin: auto能实现水平居中,而垂直居中不行? 一般子…...

linux的dirty page回写磁盘过程中是否允许并发写入更新page?
概述 众所周知Linux内核write系统调用采用pagecache机制加速写入过程,避免write系统调用长时间block应用进程,用户态进程执行write调用的时候,内核只是将用户态buffer copy到内核的pagecache当中,write系统调用就返回了,完全不需要等待数据完全写入存储设备,因为存储设备…...
Docker-基础命令使用
文章目录 前言命令帮助命令执行示意图docker rundocker psdocker inspectdocker execdocker attachdocker stopdocker startdocker topdocker rmdocker prune参考说明 前言 本文主要介绍Docker基础命令的使用方法。 命令帮助 Docker命令获取帮助方法 # docker -h Flag shor…...

【Python 程序设计】Python 中的类型提示【06/8】
目录 一、说明 二、什么是动态类型? 2.1 为什么要使用类型提示? 2.2 局限性 三、基本类型提示 3.1 声明变量的类型 3.2 函数注释 四、Python 中的内置类型 4.1 原子类型与复合类型 五、函数注释 5.1 如何指定函数的参数类型和返回类型 5.2 在函数签名中…...
78 # koa 中间件的实现
上上节实现了上下文的,上一节使用了一下中间件,这一节来实现 koa 的中间件这个洋葱模型。 思路: 储存用户所有的 callback将用户传递的 callback 全部组合起来(redux 里的 compose)组合成一个线性结构依次执行&#…...

国产操作系统麒麟v10中遇到的一些问题
下载pycharm:直接在应用商店 目标:主机1安装了虚拟机,主机2要ping通主机1安装的虚拟机。 前提:主机1,主机2在同一局域网下,同一网段。 网络配置 因为虚拟机的网段不在局域网网段内,局域网下…...

Gridea+GitPage+Gittalk 搭建个人博客
👋通过GrideaGitPage 搭建属于自己的博客! 👻GitPage 负责提供 Web 功能! 😽Gridea 作为本地编辑器,方便 push 文章! 🏷本文讲解如何使用 GrideaGitPage 服务域名(可选&a…...

代码质量保障第2讲:单元测试 - 浅谈单元测试
代码质量保障第2讲:单元测试 - 浅谈单元测试 本文是代码质量保障第2讲,浅谈单元测试。单元测试(unit testing),是指对软件中的最小可测试单元进行检查和验证。这是基础,所以围绕着单元测试,我从…...

“五度晟企通”企业发展服务平台正式发布,帮扶企业行稳致远!
在数字中国建设的大背景下,“五度易链”以企业实际发展需求为牵引,以帮扶企业行稳致远为目标,基于全体量产业大数据,运用NLP、AI等新一代信息技术,打造了数字化ToB企业发展服务平台“五度晟企通”,旨在以数…...
)
Midjourney 2026将取消/imagine?不,它正悄悄部署「自然语言-图像-3D资产」三合一原生工作流(附实测对比数据)
更多请点击: https://intelliparadigm.com 第一章:Midjourney 2026战略转向:从文本生成图像到原生三维资产创作范式跃迁 Midjourney 在 2026 年正式终止对纯 2D 图像输出的默认支持,全面启用 v6.5 “Tesseract” 引擎,…...
Translumo:Windows游戏实时翻译的终极免费解决方案:如何轻松翻译游戏字幕和视频文本
Translumo:Windows游戏实时翻译的终极免费解决方案:如何轻松翻译游戏字幕和视频文本 【免费下载链接】Translumo Advanced real-time screen translator for games, hardcoded subtitles in videos, static text and etc. 项目地址: https://gitcode.c…...

Clawforce:开源AI智能体团队基础设施,实现持久化与安全协作
1. 项目概述:Clawforce,一个为持久化AI智能体团队构建的基础设施最近在AI智能体领域,一个词被反复提及:“Agentic AI”,即智能体驱动的AI。这不再是让单个AI模型回答一个问题那么简单,而是构建一个能够自主…...

LayerDivider终极指南:5分钟掌握智能插画分层技术
LayerDivider终极指南:5分钟掌握智能插画分层技术 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 你是否曾经面对一张复杂的插画作品…...

流处理优化:提高实时数据处理性能
流处理优化:提高实时数据处理性能 一、流处理优化概述 1.1 流处理优化的定义 流处理优化是指通过优化流处理系统的性能、吞吐量和延迟,提高实时数据处理能力的过程。它涉及优化数据处理管道、资源配置和算法实现。 1.2 流处理优化的价值 低延迟ÿ…...

如何快速搭建AI聊天前端:SillyTavern完整教程与角色扮演系统指南
如何快速搭建AI聊天前端:SillyTavern完整教程与角色扮演系统指南 【免费下载链接】SillyTavern LLM Frontend for Power Users. 项目地址: https://gitcode.com/GitHub_Trending/si/SillyTavern 想象一下,你能够与任何AI角色进行沉浸式对话&#…...

Windows运行Android应用终极指南:APK Installer让你的电脑秒变安卓手机
Windows运行Android应用终极指南:APK Installer让你的电脑秒变安卓手机 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 在移动应用生态日益丰富的今天&…...
)
别再只会点灯了!用51单片机和继电器模块,做个智能插座控制台灯(附完整代码)
从点灯到智能家居:51单片机与继电器模块的实战进阶指南 当你已经能够熟练地用51单片机点亮LED灯时,是否想过将这些基础技能转化为实际生活中的实用工具?本文将带你跨越实验板与真实世界的鸿沟,用最常见的51单片机和继电器模块&…...

如何快速掌握Unitree Go2机器人ROS2开发:面向初学者的完整教程
如何快速掌握Unitree Go2机器人ROS2开发:面向初学者的完整教程 【免费下载链接】go2_ros2_sdk Unofficial ROS2 SDK support for Unitree GO2 AIR/PRO/EDU 项目地址: https://gitcode.com/gh_mirrors/go/go2_ros2_sdk Unitree Go2 ROS2 SDK是一个强大的开源项…...

收藏!小白程序员必看:从AI提效到重构产品,企业智能转型4阶段实战指南
本文深入探讨了企业如何拥抱智能时代,通过4个阶段实现AI落地。从提升内部效率开始,逐步激活沉睡数据,重构产品价值,最终形成深场景智能闭环。强调AI不应仅用于替代人工,更要关注为客户创造新价值、提升产品智能化&…...