基于视觉重定位的室内AR导航项目思路(1):最初的项目思路(SLAM)
文章目录
- 最初的项目思路(SLAM):
- 后文:
前情提要:
是第一次做项目的小白,文章内的资料介绍如有错误,请多包含!
最初的项目思路(SLAM):
由于我们在日常生活中,大多会在手机端上使用到地图导航这一功能,所以在大创项目的开始,我将手机确定为应用设备,传感器确定为相机。
但是因为知识储备较为稀少,对SLAM不够了解,在头一次接触SLAM时,我认为这会是解决这个项目的最佳方案。
(其实SLAM中最吸引我的是其构建点云地图和视觉重定位的能力,我所需要的并非是整个SLAM,但是这时我还没有意识到)
于是乎项目陷在了SLAM的学习和研究中,先是从普通的SLAM中进一步选择,在视觉SLAM(VSLAM)和激光SLAM中选择了视觉SLAM。
视觉SLAM以相机为传感器,但SLAM还有更多种传感器配合的方案。
考虑到手机上配备的传感器(手机上不止相机一种传感器),于是选择了视觉-惯性 SLAM (VISLAM) ,即视觉和惯性测量单元 (IMU)结合的SLAM方案,其中较为优秀的算法就是ORB-SLAM3。
注意:如果你在网上搜索的搜索过程中同时带着SLAM和导航这俩关键词,那么你大概会看见一系列的关于机器人导航的内容,机器人导航需要使用稠密的点云地图,但是就人的AR导航而言,稀疏点云地图就可以做到。
ORB-SLAM3构建的地图还正好是稀疏点云地图,于是将项目最初的方案思路定为:
将ORB-SLAM3做安卓端的移植,既在手机端直接建图,也在手机端做导航功能
但是遇到了一个问题:相关资源极其稀少
网络上关于ORB-SLAM3的安卓端移植的资源和博客寥寥无几,能找到的就三四篇,去掉没有介绍和配不成功的,我只找到了一篇。
资源链接:
https://nijiproject.coding.net/public/hitomi/hitomi-android/git/files
作者效果视频链接:
https://www.bilibili.com/video/BV1ph411x7d7/?spm_id_from=333.337.search-card.all.click
如果在安卓设备上在线建图,会出现如下问题:
1、帧率不高,最高不超过20fps,卡顿略微明显;
2、在线建图极大程度占用了手机上的计算资源,容易引起设备发热,加快手机电量的消耗;
3、相机视角移动快速或是存在快速移动的景物,相机位姿容易丢失,建图过程不是很流畅。上文开源项目的作者本人建图的演示视频中,建图视频是1.5倍速的,尚且有点慢,一倍速的行走速度可想而知
如果不使用该开源项目,仅考虑自身的编程能力,我暂时还不具备自己将ORB-SLAM3完全地移植到安卓端上且不产生任何错误的能力,况且在设备上切实存在的物理问题目前是无法解决的。
既然我无法在手机上完成使用ORB-SLAM3进行在线建图的功能,只好寻求其他解决的方案。
于是只能换种角度想,它是放错位置的功能,建图这个部分的任务,手机不是很好的载体。
在后续的思考过程中,我回想起了在使用虚拟机上的 Ubuntu18.04上配置完ORB-SLAM3后使用数据集进行离线建图的过程。
在电脑上建图或许是个不错的选择。
其实我真正需要的是ORB-SLAM3其中点云地图的构建功能,还有视觉重定位提供的位姿信息,我大可以分开做两部分的功能。
所以在这一时间段,我开始逐步转变我的想法:
将建图和导航分为了两个部分处理,在电脑上实现建图这个部分,在手机上使用软件完成导航。
在思考进行到这一步的时候,虽然已经浪费了一个月的时间将工作集中于SLAM的学习和项目的思路探索中,但是好歹有所进展。
后文:
基于视觉重定位的室内AR导航项目思路(2):改进的建图和定位分离的项目思路
如果你觉得这篇文章写的不错,多多点赞~收藏吧!
相关文章:
:最初的项目思路(SLAM))
基于视觉重定位的室内AR导航项目思路(1):最初的项目思路(SLAM)
文章目录 最初的项目思路(SLAM):后文: 前情提要: 是第一次做项目的小白,文章内的资料介绍如有错误,请多包含! 最初的项目思路(SLAM): 由于我们在…...
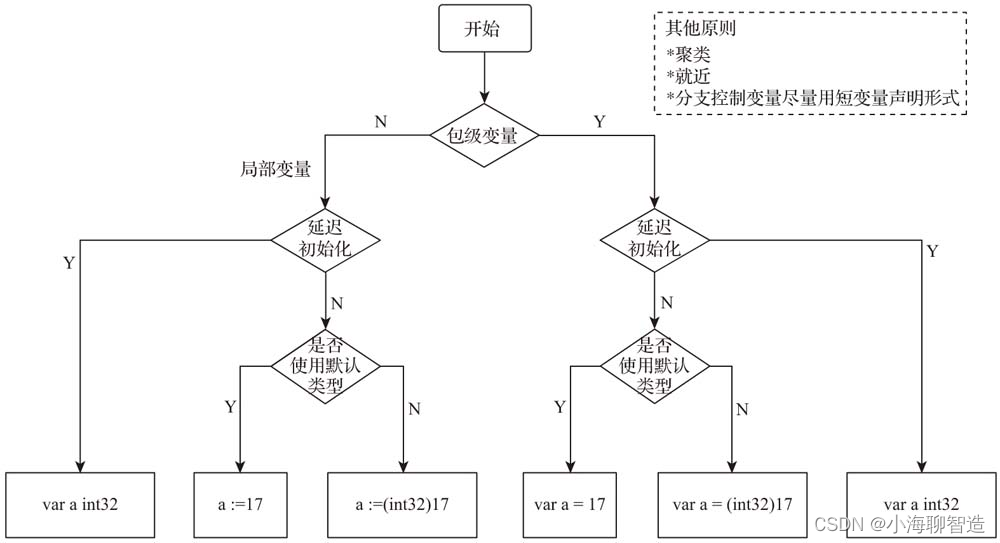
小白学go基础05-变量声明形式
和Python、Ruby等动态脚本语言不同,Go语言沿袭了静态编译型语言的传统:使用变量之前需要先进行变量的声明。 变量声明形式使用决策流程图 这里大致列一下Go语言常见的变量声明形式: var a int32 var s string "hello" var i 13 …...

高可用Kuberbetes部署Prometheus + Grafana
概述 阅读官方文档部署部署Prometheus Grafana GitHub - prometheus-operator/kube-prometheus at release-0.10 环境 步骤 下周官方github仓库 git clone https://github.com/prometheus-operator/kube-prometheus.git git checkout release-0.10 进入工作目录 cd kube…...
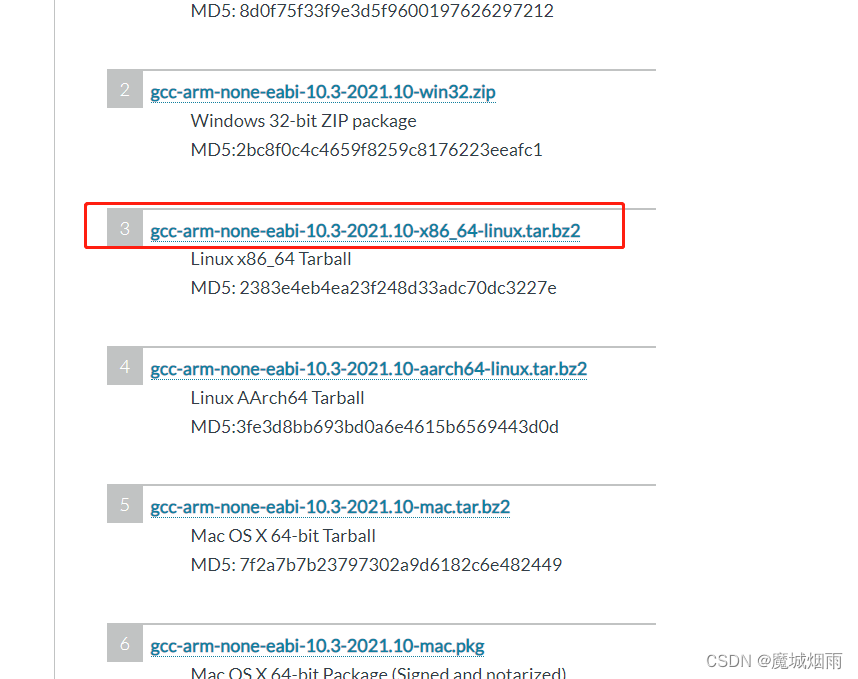
ardupilot 安装gcc-arm-none-eabi编译工具
目录 文章目录 目录摘要0简介1.下载网站2.安装摘要 本节主要记录ardupilot使用的编译器安装过程。 0简介 gcc-arm-none-eabi是GNU项目下的软件,是一个面向裸机arm的编译器。那么说了这么多介绍,它都包含什么具体功能又怎么安装与使用呢,我们继续。 1.下载网站 gcc-arm-n…...

ORACLE集群管理-19C RAC重新配置IPV6
1 问题概述 数据库已经配置和IPV6和 IPV4双线协议,需要重新配置IPV6 2 关闭相关资源 1 root用户执行 ./srvctl stop scan_listener -i 1 ./srvctl stop scan ./srvctl stop listener -n orcldb1 ./srvctl stop listener -n orcldb2 ./srvctl stop vip -n orcldb…...
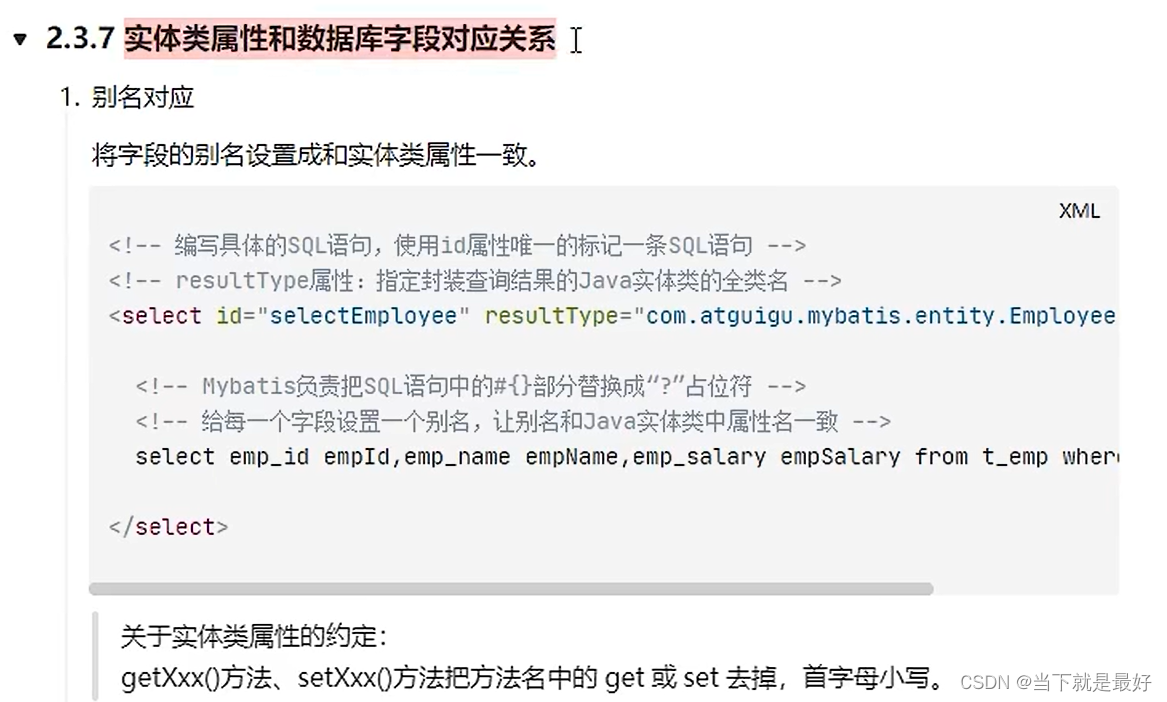
Mybatis实体类属性与数据库字段的对应关系
方法一:起别名 select t_id(数据库字段) tId(类的属性), ... , ...from 表名 方法二:开启驼峰映射 <!-- 开启驼峰映射 数据库 s_id java类 sId--><setting name"mapUnderscoreToCamelCase" value"true"/> 当java类中属性命名…...

Unity(三) Shader着色器初探
学习3D开发技术的时候无可避免的要接触到Shader,那么Shader是个什么概念呢?其实对于开发同事来说还是比较难理解的,一般来说Shader是服务于图形渲染的一类技术,开发人员可以通过其shader语言来自定义显卡渲染页面的算法࿰…...

苹果电脑要安装杀毒软件吗?mac用什么杀毒软件好?
对于这个问题让人很是纠结,Mac不需要杀毒这个理论一直都深入人心,Mac OS X权限管理特性可以防毒的说法也一直甚嚣尘上,很多小伙伴如我一样搞不清楚到底要不要安装杀毒软件。,毕竟当前个人信息安全泄露泛滥不穷的年代,我…...

MySQL——索引
索引在 MySQL 数据库中分三类: B 树索引Hash 索引全文索引 目的:在查询的时候提升效率 b树 参考:https://blog.csdn.net/qq_40649503/article/details/115799935 数据库索引,是数据库管理系统中一个排序的数据结构…...

110. 平衡二叉树
题目链接: 力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台 递归法: 我的代码: *** Definition for a binary tree node.* struct TreeNode {* int val;* TreeNode *left;* TreeNode *right;* Tree…...
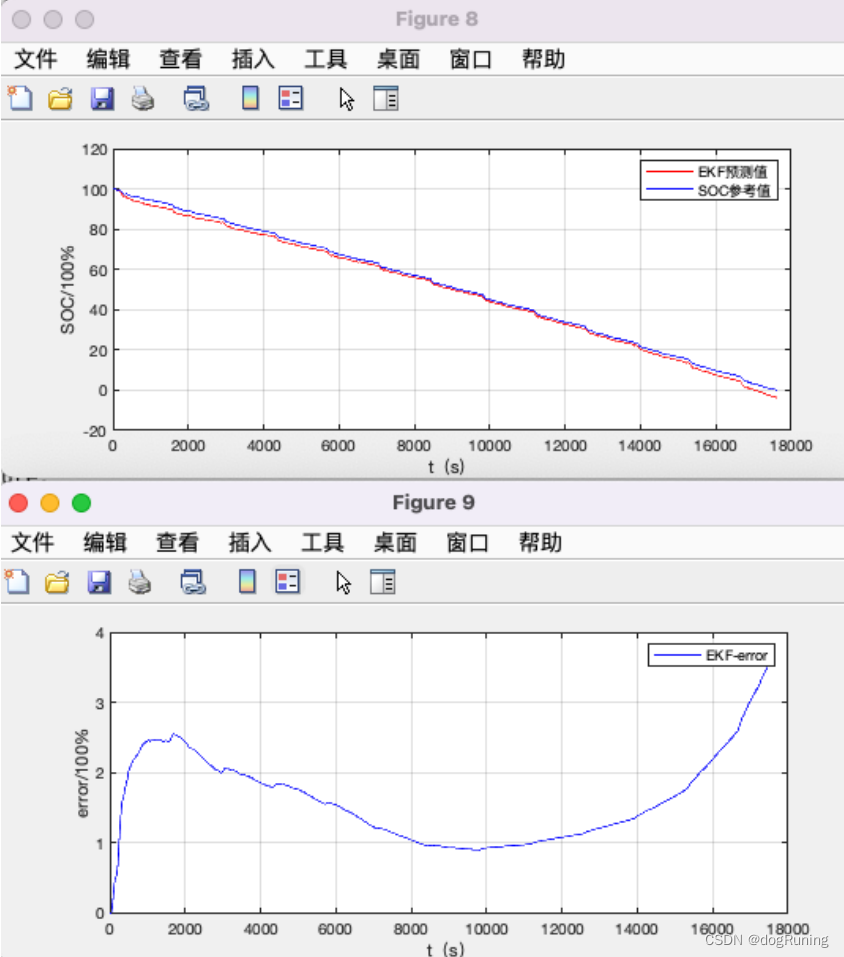
遗忘因子递推最小二乘参数估计(FFRLS)
基于遗忘因子的最小二乘法电池参数辨识 最小二乘法是系统辨识中最常用的一种估算方法。为了克服最小二乘法存在”数据饱和”的问题,我们通常采用含有遗忘因子的递推最小二乘法(Forgetting Factor Recursive Least Square,FFRLS)算法进行电池模型的参数辨识。 1、二…...
【redis进阶】基础知识简要回顾
1. 常见功能介绍 聚合统计 使用list集合的差集、并集来统计 排序统计 SortedSet(ZSet)统计,再利用分页列出权重高的元素 二值状态统计 BitMap存储,获取并统计 SETBIT uid:sign:3000:202008 2 1 GETBIT uid:sign:3000:202008 2…...
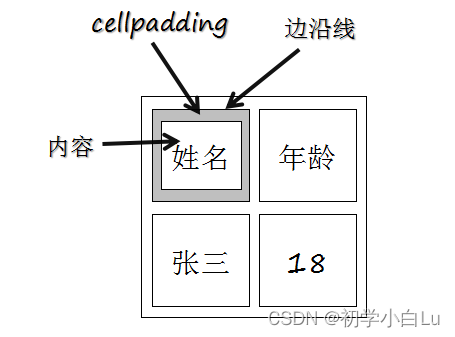
HTML5-3-表格
文章目录 属性边框属性标题跨行和跨列单元格边距 HTML 表格由 <table> 标签来定义。 tr:tr 是 table row 的缩写,表示表格的一行。td:td 是 table data 的缩写,表示表格的数据单元格。th:th 是 table header的缩…...

Spring Boot + Vue的前后端项目结构及联调查询
Spring Boot Vue的前后端项目结构及联调查询 当你刚开始学习前后端开发时,可能会感到有些困惑和不知所措。下面是一些建议,希望能为你的学习之旅提供一些启示: 建立坚实的基础知识:学习前后端开发的第一步是建立坚实的基础知识。…...
Transformer貌似也是可以使用state递归解码和训练的
import paddle import numpy as npclass HeadLoss(paddle.nn.Layer):def __init__(self):super(HeadLoss, self).__init__()...
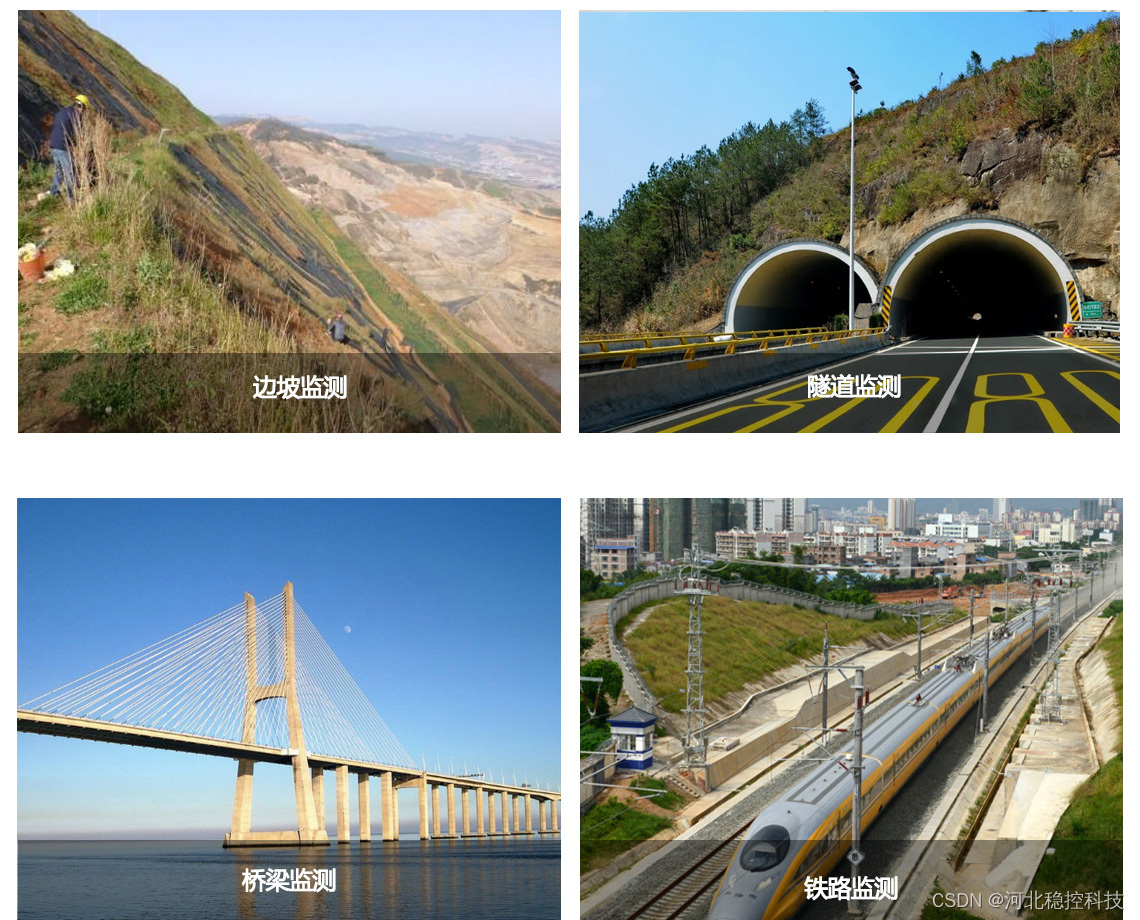
振弦采集仪应用地铁隧道安全监测详细解决方案
振弦采集仪应用地铁隧道安全监测详细解决方案 随着城市化进程的不断加快,地铁作为一种高效、便捷、环保的交通方式已经成为现代城市不可或缺的一部分。因此,对地铁的安全性也越来越重视,一般二三线以上的城市在不断发展中,地铁做…...
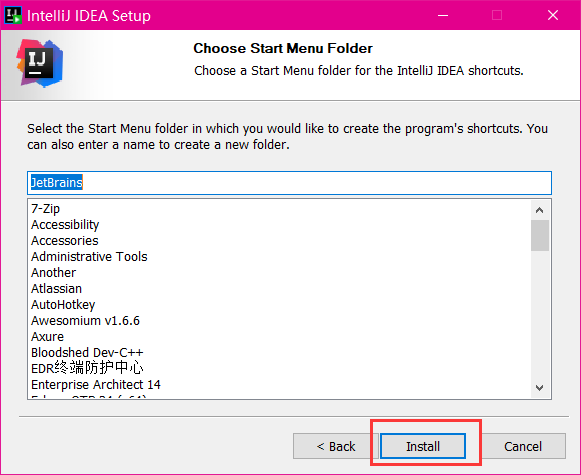
2023 IntelliJ IDEA下载、安装教程, 附详细图解
文章目录 下载与安装IDEA推荐阅读 下载与安装IDEA 首先先到官网下载最新版的IntelliJ IDEA, 下载后傻瓜式安装就好了 官网下载地址:https://www.jetbrains.com/ 1、下载完后在本地找到该文件,双击运行 idea 安装程序 2、点击 Next 3、选择安装路径&…...

波卡生态重要动态一览:w3ndi 推出,首尔、新加坡、里斯本活动接踵而至
Web3 市场冷却,但新的社区合作与推进仍在发生,技术和产品依然不断迭代。OneBlock 为你介绍波卡生态近期值得你关注的动态,以及接下来重要的行业活动。 波卡生态重要进展 1、最新 Referendum#110,提议对验证器配置进行多项修改&a…...

成都瀚网科技有限公司:抖音商家怎么免费入驻?
随着抖音成为全球最受欢迎的短视频平台之一,越来越多的商家开始关注抖音上的商机。抖音商家的进驻可以帮助商家扩大品牌影响力和销售渠道。那么,如何免费进入抖音成为商家呢?下面就为大家介绍一下具体步骤。 1、抖音商家如何免费注册…...
vue Router从入门到精通
文章目录 介绍使用多级路由实例 路由的query参数传递参数接收参数实例 命名路由作用使用 params参数声明接收params参数传参接收参数实例 props配置实例 router-link的replace属性编程式路由导航作用使用实例 缓存路由组件两个新的生命周期钩子实例 路由守卫作用分类全局守卫独…...
)
Midjourney输出≠成品!树莓派自动裁切+水印+背胶封装印相工作流(附GitHub开源项目+硬件BOM清单)
更多请点击: https://intelliparadigm.com 第一章:Midjourney输出≠成品!树莓派自动裁切水印背胶封装印相工作流(附GitHub开源项目硬件BOM清单) Midjourney生成的高分辨率图像只是创作起点,真正交付实体印…...

Intelli开源智能代理框架:从核心概念到生产部署全解析
1. 项目概述:Intelli 是什么,以及它为何值得关注最近在开源社区里,一个名为intelligentnode/Intelli的项目开始引起不少开发者的注意。乍一看这个标题,你可能会有点困惑:Intelli?是某种新的智能代理框架&am…...

终极指南:Flair如何引领NLP技术未来发展趋势
终极指南:Flair如何引领NLP技术未来发展趋势 【免费下载链接】flair A very simple framework for state-of-the-art Natural Language Processing (NLP) 项目地址: https://gitcode.com/gh_mirrors/fl/flair Flair是一个由柏林洪堡大学开发的简单而强大的自…...

C语言核心知识体系总结
C语言核心知识体系总结本文旨在系统梳理C语言的基础与进阶知识点,帮助读者建立清晰的知识框架。内容涵盖:程序编译过程、数据类型与变量、运算符与表达式、控制结构、函数、指针、结构体与共用体、动态内存分配、文件操作等。适合复习巩固或查漏补缺。第…...

数据库测试的盲区:用AI生成边界值,发现隐藏的数据异常
在软件测试领域,数据库层的质量保障常常陷入一种“平静的假象”——核心CRUD操作通过、索引命中率达标、慢查询被优化,一切看似井然有序。然而线上事故统计却揭示了一个残酷的事实:超过七成的数据库相关故障并非源于架构缺陷或性能瓶颈&#…...

【研报 A110】物理AI时代的具身数据采集需求研究:国家级训练场落地,开源生态加速建设
摘要:物理AI时代,具身智能与世界模型的发展,推动具身数据采集成为下一代数据基建的核心浪潮。具身大模型对数据有着EB级的海量需求,同时对多模态、异构性与质量要求极高,当前数据缺口成为制约具身智能发展的核心瓶颈&a…...
搜索插入位置、搜索二维矩阵、查找数组相同的所有位置、搜索旋转排序数组、旋转升序数组的最小值)
【LeetCode 手撕算法】(二分查找)搜索插入位置、搜索二维矩阵、查找数组相同的所有位置、搜索旋转排序数组、旋转升序数组的最小值
复杂度为O(log n)且有序用二分查找35-搜索插入位置思路:二分查找,左右指针 求中间值注意:while的查询条件是>class Solution {public int searchInsert(int[] nums, int target) {int left0;int rightnums.length-1;while(left<right){…...

联想刃7000k BIOS解锁终极指南:安全释放隐藏性能的3种方法
联想刃7000k BIOS解锁终极指南:安全释放隐藏性能的3种方法 【免费下载链接】Lenovo-7000k-Unlock-BIOS Lenovo联想刃7000k2021-3060版解锁BIOS隐藏选项并提升为Admin权限 项目地址: https://gitcode.com/gh_mirrors/le/Lenovo-7000k-Unlock-BIOS 对于联想刃7…...
)
壁纸引擎安卓版(wallpaper engine安卓版免费下载)
wallpaper engine安卓版是Steam上的Wallpaper Engine官方的安卓应用程序。 Wallpaper Engine Android 应用程序是免费的,支持将现有 Wallpaper Engine 壁纸合集无线传输到您的 Android 移动设备。 ————————————————————————————————…...

2026 年 Redis 面试题全解析:原理 + 实战 + 高频考点
Redis 高频面试题全解析(2026 最新版) Redis 作为后端开发高并发、高可用架构的核心组件,是面试中必问的核心考点。本文从基础入门、核心原理、高并发实战、高可用架构、进阶运维五大模块,整理大厂高频面试题与标准答案ÿ…...