移植FlashDB、SFUD到STM32f407
个人上篇文章 搭建STM32F407的SPI-Flash(基于STM32CubeMX)_小刚学長的博客-CSDN博客
主要是解决STM32CubeMX这边的配置,对code端侧是简单介绍了下
实际项目上一般都是拿片外flash存储一些东西,比如一些比较多的配置、参数,偶尔修改下,还有一些程序文件,日志之类的。存在读写操作,而nor flash是每次擦除后才可以写入(也就是说你要更新内容,也是要先擦除再写入新的数据),往往这种操作比较麻烦(最近简单的方法,先把当簇内容读出来,然后对相应的位置进行修改,然后先擦除当前簇,再写入),如果更新内容存在跨簇,那更麻烦点,需要判断。另外,还有个特点,nor flash存在擦除次数上限,如果超过一定次数,此区域容易坏。
对于windows、linux,存在文件系统,文件系统就可以很好规避以上问题,使用时也不用去关心、去计算这些值。对于STM32显然文件系统开销很大,不太合适
那么STM32有没有轻量点库之类的,答案是有的:
FlashDB + SFUD + SPI Flash
FlashDB就是个简单版本的DB,也是专门适合MCU环境,而且针对Flash特点,对相同簇写入次数也有优化(写入均衡)。FlashDB 支持kv类型数据库、也支持时间序列数据库,一般也足够用了。关键还是占资源少,写flash均衡,这样应用者可更关注逻辑部分。是个好东西,记得早些年,都是自己造轮子的,又无法证明自己造轮子是可靠的,因此经常被吊。
当然,FlashDB 不仅仅是 通过SFUD去访问SPI Flash,也可以通过自己封装的SPI FLASH驱动代码去访问,也支持文件系统(文件方式)去访问外部flash。但经典组合,还是

由于芯片本身不同,这里芯片不仅仅是FLASH芯片,还包括MCU,因此要实现自己的代码,需要做相应的改进(调整),以下的方案是基于STM32F407芯片,具体硬件配置,参考上篇
1. 把相关代码复制到工程里面:(包括对应 h文件)

2. fal_cfg.h fal 配置
#ifndef _FAL_CFG_H_
#define _FAL_CFG_H_#include "main.h"#define FAL_DEBUG 1
#define FAL_PART_HAS_TABLE_CFG
#define FAL_USING_SFUD_PORT/* ===================== Flash device Configuration ========================= */
extern struct fal_flash_dev nor_flash0;/* flash device table */
#define FAL_FLASH_DEV_TABLE \
{ \&nor_flash0, \ //nor flash 基本信息以及读写擦除接口等。是fal_flash_sfud_port.c 有描述,也是需要初始化的对象
}/* ====================== Partition Configuration ========================== */
#ifdef FAL_PART_HAS_TABLE_CFG
/* partition table */
#define FAL_PART_TABLE \
{ \{FAL_PART_MAGIC_WROD, "fdb_kvdb1", "norflash0", 0, 1024*1024, 0}, \
/* 1M(FLASH 地址0~1M) 大小的table, 这里只是一张表,根据实际情况配置*/
}
#endif /* FAL_PART_HAS_TABLE_CFG */#endif /* _FAL_CFG_H_ */3. fal_flash_sfud_port.c 修改,印象中只修改过 init
#ifndef FAL_USING_NOR_FLASH_DEV_NAME
#define FAL_USING_NOR_FLASH_DEV_NAME "norflash0"
#endifstatic int init(void);
static int read(long offset, uint8_t *buf, size_t size);
static int write(long offset, const uint8_t *buf, size_t size);
static int erase(long offset, size_t size);static sfud_flash_t sfud_dev = NULL;
struct fal_flash_dev nor_flash0 =
{.name = FAL_USING_NOR_FLASH_DEV_NAME,.addr = 0,.len = 1024 * 1024,.blk_size = 4096,.ops = {init, read, write, erase},.write_gran = 1
};static int init(void)
{#ifdef RT_USING_SFUD/* RT-Thread RTOS platform */sfud_dev = rt_sfud_flash_find_by_dev_name(FAL_USING_NOR_FLASH_DEV_NAME);
#else/* bare metal platform */extern sfud_flash flash_table[1]; // 这里table实际上是 指 SFUD_FLASH_DEVICE_TABLEsfud_dev = &flash_table[0]; // sfud_dev 指向 table[0] 这个非常重要
#endifif (NULL == sfud_dev){return -1;}/* update the flash chip information */nor_flash0.blk_size = sfud_dev->chip.erase_gran;nor_flash0.len = sfud_dev->chip.capacity;return 0;
}static int read(long offset, uint8_t *buf, size_t size)
{assert(sfud_dev);assert(sfud_dev->init_ok);sfud_read(sfud_dev, nor_flash0.addr + offset, size, buf);return size;
}static int write(long offset, const uint8_t *buf, size_t size)
{assert(sfud_dev);assert(sfud_dev->init_ok);if (sfud_write(sfud_dev, nor_flash0.addr + offset, size, buf) != SFUD_SUCCESS){return -1;}return size;
}static int erase(long offset, size_t size)
{assert(sfud_dev);assert(sfud_dev->init_ok);if (sfud_erase(sfud_dev, nor_flash0.addr + offset, size) != SFUD_SUCCESS){return -1;}return size;
}4. sfud_cfg.h 配置 SFUD_FLASH_DEVICE_TABLE
#ifndef _SFUD_CFG_H_
#define _SFUD_CFG_H_#define SFUD_DEBUG_MODE#define SFUD_USING_SFDP#define SFUD_USING_FLASH_INFO_TABLEenum {SFUD_W25Q128_DEVICE_INDEX = 0, // 如果多个,往下加,名字自己取,但要跟其他对应好
};// 上下要对应好
#define SFUD_FLASH_DEVICE_TABLE \
{ \[SFUD_W25Q128_DEVICE_INDEX] = {.name = "W25Q128B", .spi.name = "SPI1"}, \
}#endif /* _SFUD_CFG_H_ */5. sfud_port.c 修改,就是要实现 对接SPI接口
要做:
SPI相关配置:是通过HAL访问SPI,还是其他?片选信号对应GPIO信息
SPI延时函数、锁、解锁等
SPI 读写接口封装
#include "spi.h"typedef struct {SPI_HandleTypeDef *spix;GPIO_TypeDef *cs_gpiox;uint32_t cs_gpio_pin;
} spi_user_data, *spi_user_data_t;void sfud_log_debug(const char *file, const long line, const char *format, ...);static void spi_configuration(spi_user_data_t spi) {}static void spi_lock(const sfud_spi *spi) {__disable_irq();
}static void spi_unlock(const sfud_spi *spi) {__enable_irq();
}/*** 这个函数要重新写*/
static sfud_err spi_write_read(const sfud_spi *spi, uint8_t *write_buf, size_t write_size, uint8_t *read_buf,size_t read_size) {sfud_err result = SFUD_SUCCESS;spi_user_data_t spi_dev = (spi_user_data_t) spi->user_data;uint16_t blockSize = 0;uint32_t offset = 0;if (write_size) {SFUD_ASSERT(write_buf);}if (read_size) {SFUD_ASSERT(read_buf);}// HAL - 片选拉低HAL_GPIO_WritePin(spi_dev->cs_gpiox,spi_dev->cs_gpio_pin,GPIO_PIN_RESET); if (write_size){if (HAL_SPI_Transmit(spi_dev->spix, write_buf, write_size, 100) != HAL_OK){result = SFUD_ERR_WRITE;goto exit;}}while (read_size){blockSize = read_size > 0xFFFF ? 0xFFFF : read_size;read_size -= blockSize;if (HAL_SPI_Receive(spi_dev->spix, read_buf + offset, blockSize, 100) != HAL_OK){result = SFUD_ERR_READ;goto exit;}offset += blockSize;}exit:
// HAL - 片选拉高HAL_GPIO_WritePin(spi_dev->cs_gpiox,spi_dev->cs_gpio_pin,GPIO_PIN_SET);return result;
}/* about 100 microsecond delay */
static void retry_delay_100us(void) {DWT_Delay(100); // 这里要自己去实现一个,主要是100微秒,不是100ms
}// spi 关键信息配置,对应spi多少,片选多少
static spi_user_data spi1 = { .spix = &hspi1, .cs_gpiox = SPI_FLASH_CS_GPIO_Port, .cs_gpio_pin = SPI_FLASH_CS_Pin };
sfud_err sfud_spi_port_init(sfud_flash *flash) {sfud_err result = SFUD_SUCCESS;switch (flash->index) {case SFUD_W25Q128_DEVICE_INDEX: {/* SPI 外设初始化 */spi_configuration(&spi1);/* 同步 Flash 移植所需的接口及数据 */flash->spi.wr = spi_write_read;flash->spi.lock = spi_lock;flash->spi.unlock = spi_unlock;flash->spi.user_data = &spi1;/* about 100 microsecond delay */flash->retry.delay = retry_delay_100us;/* about 60 seconds timeout */flash->retry.times = 60 * 10000;break;}}return result;
}/*** This function is print debug info.** @param file the file which has call this function* @param line the line number which has call this function* @param format output format* @param ... args*/
void sfud_log_debug(const char *file, const long line, const char *format, ...) {va_list args;printf("[%s,%d] ", file, line);va_start(args, format);printf(format, args);va_end(args);printf("\n");
}/*** This function is print routine info.** @param format output format* @param ... args*/
void sfud_log_info(const char *format, ...) {va_list args;va_start(args, format);printf(format, args);va_end(args);printf("\n");
}以上信息,一般网上例子就最多那么多,实际还有两个关键:
1. printf 要重定向,还不能用Micro LIB的方式
在usart.c 添加如下代码,并不要勾选Micro LIB!!
/* USER CODE BEGIN 1 */
/* 加入以下代码, 支持printf函数, 而不需要选择use MicroLIB */#if 1
#if (__ARMCC_VERSION >= 6010050) /* 使用AC6编译器时 */
__asm(".global __use_no_semihosting\n\t"); /* 声明不使用半主机模式 */
__asm(".global __ARM_use_no_argv \n\t"); /* AC6下需要声明main函数为无参数格式,否则部分例程可能出现半主机模式 */#else
/* 使用AC5编译器时, 要在这里定义__FILE 和 不使用半主机模式 */
#pragma import(__use_no_semihosting)struct __FILE
{int handle;/* Whatever you require here. If the only file you are using is *//* standard output using printf() for debugging, no file handling *//* is required. */
};#endif/* 不使用半主机模式,至少需要重定义_ttywrch\_sys_exit\_sys_command_string函数,以同时兼容AC6和AC5模式 */
int _ttywrch(int ch)
{ch = ch;return ch;
}/* 定义_sys_exit()以避免使用半主机模式 */
void _sys_exit(int x)
{x = x;
}char *_sys_command_string(char *cmd, int len)
{return NULL;
}/* FILE 在 stdio.h里面定义. */
FILE __stdout;/* 重定义fputc函数, printf函数最终会通过调用fputc输出字符串到串口 */
int fputc(int ch, FILE *f)
{while ((USART1->SR & 0X40) == 0); /* 等待上一个字符发送完成 */USART1->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */ return ch;
}
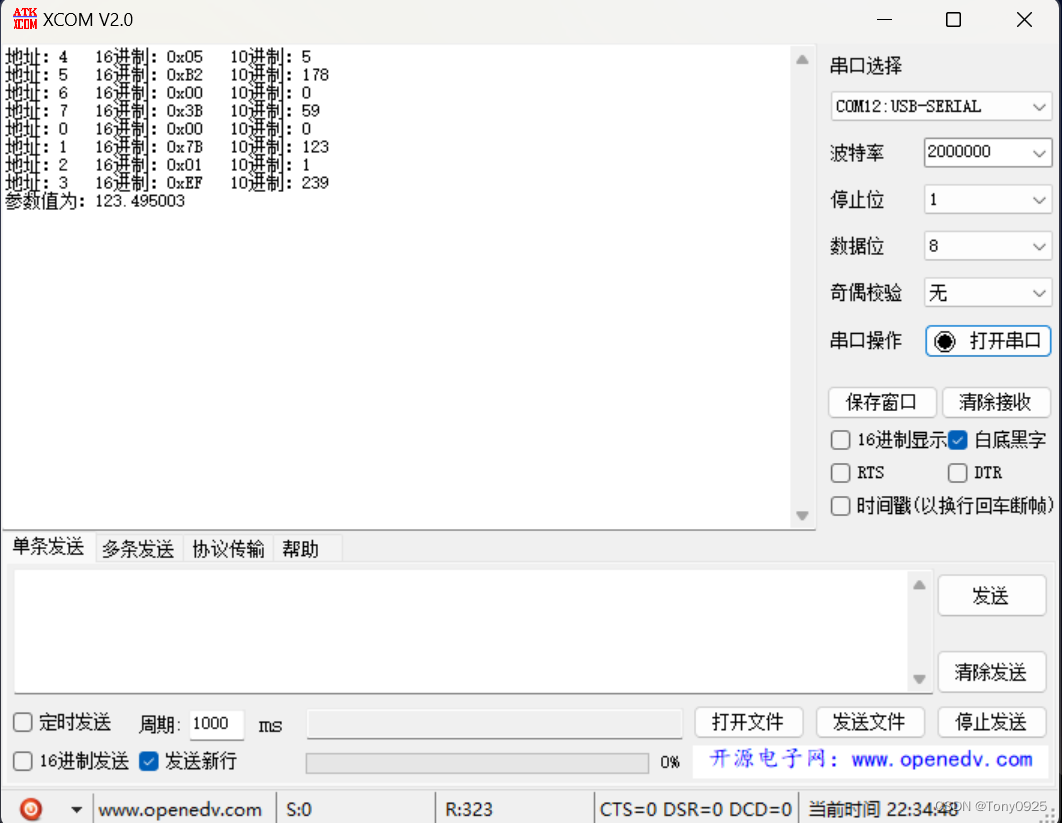
#endif/* USER CODE END 1 */2. 增加芯片信息 SFUD_FLASH_CHIP_TABLE 最后一个就是我的芯片信息!!如果没有,需要手动添加,注意 "W25Q128B" 的name 关键字,这个也不是随便取的,要注意与前面的对应!!
#define SFUD_FLASH_CHIP_TABLE \
{ \{"AT45DB161E", SFUD_MF_ID_ATMEL, 0x26, 0x00, 2*1024*1024, SFUD_WM_BYTE|SFUD_WM_DUAL_BUFFER, 512, 0x81}, \{"W25Q40BV", SFUD_MF_ID_WINBOND, 0x40, 0x13, 512*1024, SFUD_WM_PAGE_256B, 4096, 0x20}, \{"SST25VF016B", SFUD_MF_ID_SST, 0x25, 0x41, 2*1024*1024, SFUD_WM_BYTE|SFUD_WM_AAI, 4096, 0x20}, \{"M25P32", SFUD_MF_ID_MICRON, 0x20, 0x16, 4*1024*1024, SFUD_WM_PAGE_256B, 64*1024, 0xD8}, \{"EN25Q32B", SFUD_MF_ID_EON, 0x30, 0x16, 4*1024*1024, SFUD_WM_PAGE_256B, 4096, 0x20}, \{"GD25Q64B", SFUD_MF_ID_GIGADEVICE, 0x40, 0x17, 8*1024*1024, SFUD_WM_PAGE_256B, 4096, 0x20}, \{"S25FL216K", SFUD_MF_ID_CYPRESS, 0x40, 0x15, 2*1024*1024, SFUD_WM_PAGE_256B, 4096, 0x20}, \{"A25L080", SFUD_MF_ID_AMIC, 0x30, 0x14, 1*1024*1024, SFUD_WM_PAGE_256B, 4096, 0x20}, \{"F25L004", SFUD_MF_ID_ESMT, 0x20, 0x13, 512*1024, SFUD_WM_BYTE|SFUD_WM_AAI, 4096, 0x20}, \{"PCT25VF016B", SFUD_MF_ID_SST, 0x25, 0x41, 2*1024*1024, SFUD_WM_BYTE|SFUD_WM_AAI, 4096, 0x20}, \{"W25Q128B", SFUD_MF_ID_WINBOND, 0x40, 0x18, 16*1024*1024, SFUD_WM_PAGE_256B, 4096, 0x20}, \
}这样应该可以了。我记得就这么多!
相关文章:
移植FlashDB、SFUD到STM32f407
个人上篇文章 搭建STM32F407的SPI-Flash(基于STM32CubeMX)_小刚学長的博客-CSDN博客 主要是解决STM32CubeMX这边的配置,对code端侧是简单介绍了下 实际项目上一般都是拿片外flash存储一些东西,比如一些比较多的配置、参数&…...
【算法基础】时间复杂度和空间复杂度
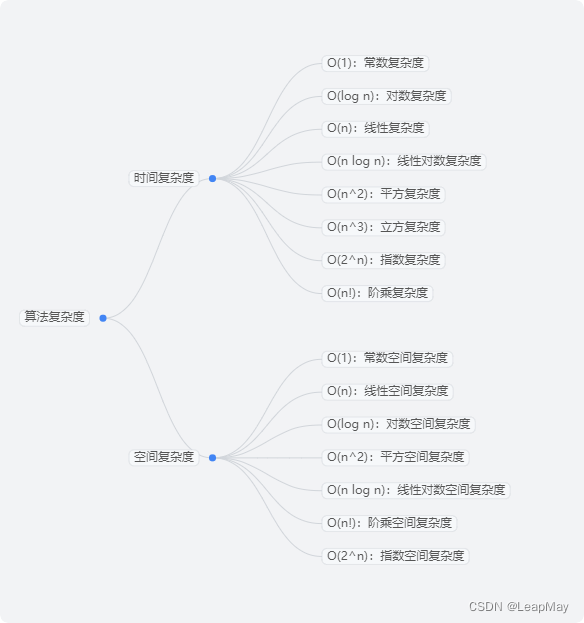
目录 1 算法的评价 2 算法复杂度 2.1 时间复杂度(Time Complexity) 2.1.1 如何计算时间复杂度: 2.1.2 常见的时间复杂度类别与示例 2.2 空间复杂度 2.2.1 如何计算空间复杂度 2.2.2 常见的空间复杂度与示例 3 时间复杂度和空间复杂度…...

解决微信小程序不支持TextEncoder/TextDecoder对象
问题描述:在使用小程序开发者工具开发小程序中使用到了CRC算法,其中有一行代码使用到了TextEncoder对象,在开发工具中一切正常,到手机上会报出错误错误如下: MiniProgramError TextEncoder is not defined ReferenceEr…...

Qt下SVG格式图片应用
SVG格式图片介绍 svg格式图片又称矢量图,该种格式的图片不同于png等格式的图片,采用的并不是位图的形式来组织图片,而是采用线条等组织图片,svg格式是图片的文件格式是xml,可以通过文件编译器打开查看svg格式内容。 …...
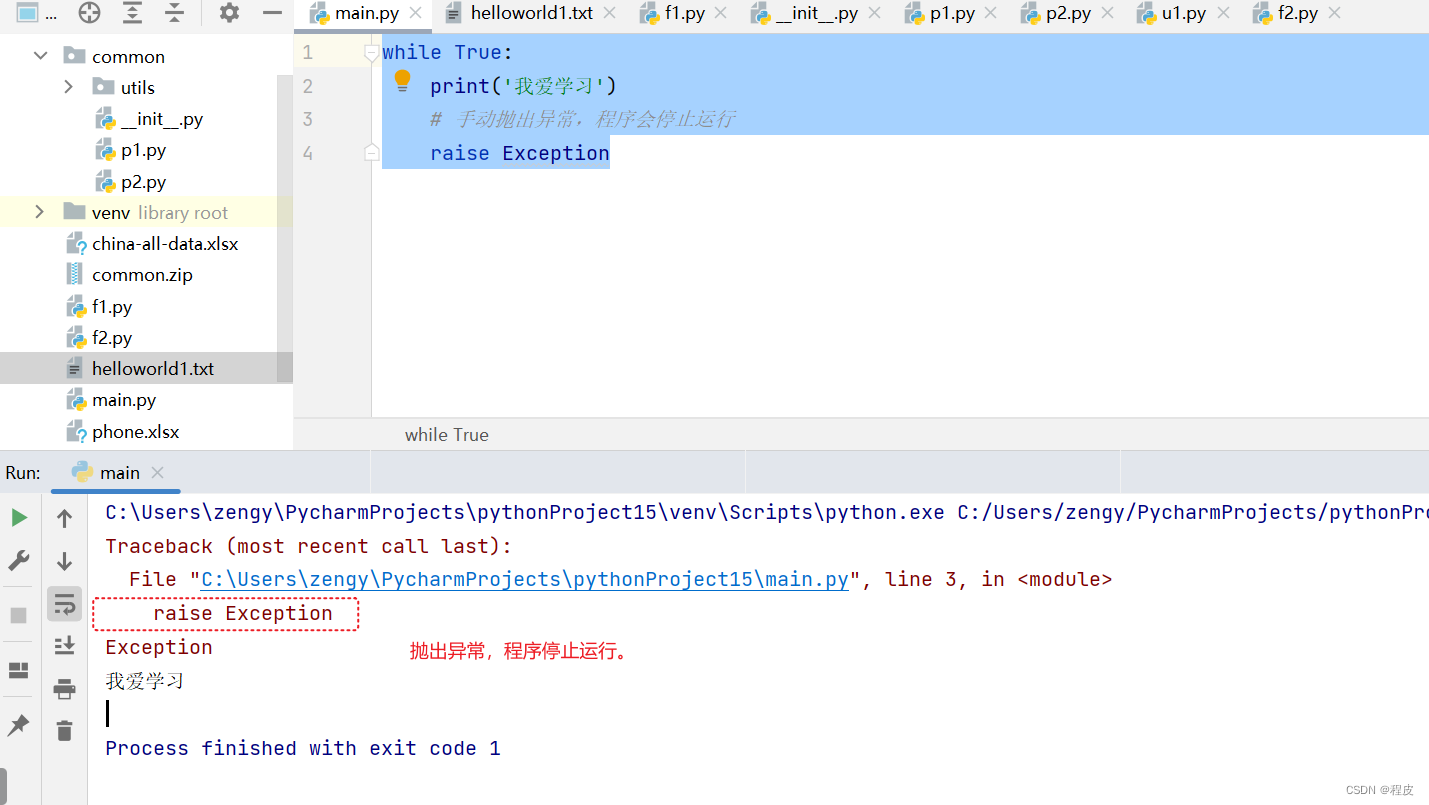
python异常处理
参考语法:https://docs.python.org/zh-cn/3/tutorial/errors.html 在编写代码的时候,如果你写的程序出现报错,程序就会停止运行,后面的代码就不再执行。 如果程序发生错误,可以在代码中添加异常处理,保证程…...

go get命令不再具有安装功能
go get功能呢 一直以来,我们知道go get命令可以借助代码管理工具通过远程拉取或更新代码包及其依赖包,并自动完成编译和安装。整个过程就像安装一个App一样简单。 go get命令可以动态获取远程代码包,命令在内部实际上分成了两步操作&#x…...
合宙Air724UG LuatOS-Air lvgl7-lvgl(矢量字体)
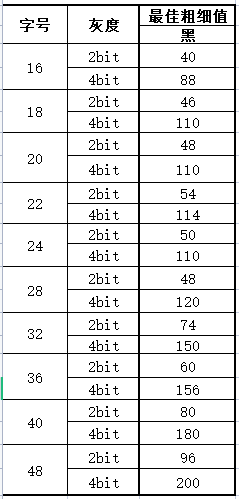
如何用开发板实现lvgl加载外部矢量字体功能 目录名称 如何用开发板实现lvgl加载外部矢量字体功能 简介材料准备API 说明步骤 1. 将字库芯片接在模块spi上2. 版本定制3. 初始化spi4. 设置字体5.字体使用测试固件和脚本显示效果字号灰度最佳粗细值对应表常见问题 1. 设置68号字体…...

LRU的实现
题目内容 实现一个 LRUCache 类,三个接口: LRUCache(int capacity) 创建一个大小为 capacity 的缓存get(int key) 从缓存中获取键为 key 的键值对的 valueput(int key, int value) 向缓存中添加键值对 (key, value) 要求 get 和 put 的均摊时间复杂度…...

consul 备份还原导入导出
正文 工作中要保证生产环境部署的consul的集群能够安全稳定地对外提供服务,即使出现系统故障也能快速恢复,这里将讲述部分的备份还原操作及KV的导入导出操作。 备份与还原 配置文件、服务器状态 需要备份的主要有两类数据:consul相关的配置文…...
6.网络编程套接字(下)
文章目录 4.TCP流套接字编程4.1ServerSocket API4.2Socket API4.3TCP中的长短连接4.4示例一:一发一收(长连接)4.4.1TCP服务端4.4.2TCP客户端 4.5示例二:请求响应(短连接)4.5.1TCP服务端4.5.2TCP客户端 4.6再…...
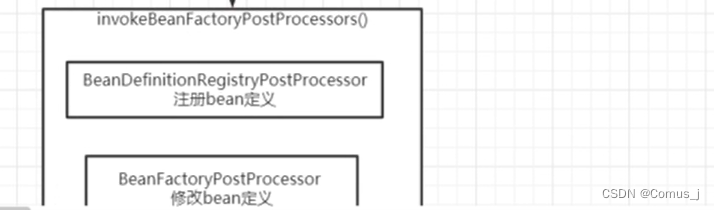
4.3-内置后置PostProcess处理器深度讲解
在reader里面注册了很多Bean定义 reader会调取register()来注册配置类 调用上句,就会把配置类注册到BeanDefinitionMap中去 配置类有了、解析配置类的处理器有了 然后, 在第三步refresh() 进行IOC容器刷新中的invokeBeanPostProcessors(beanFactory…...
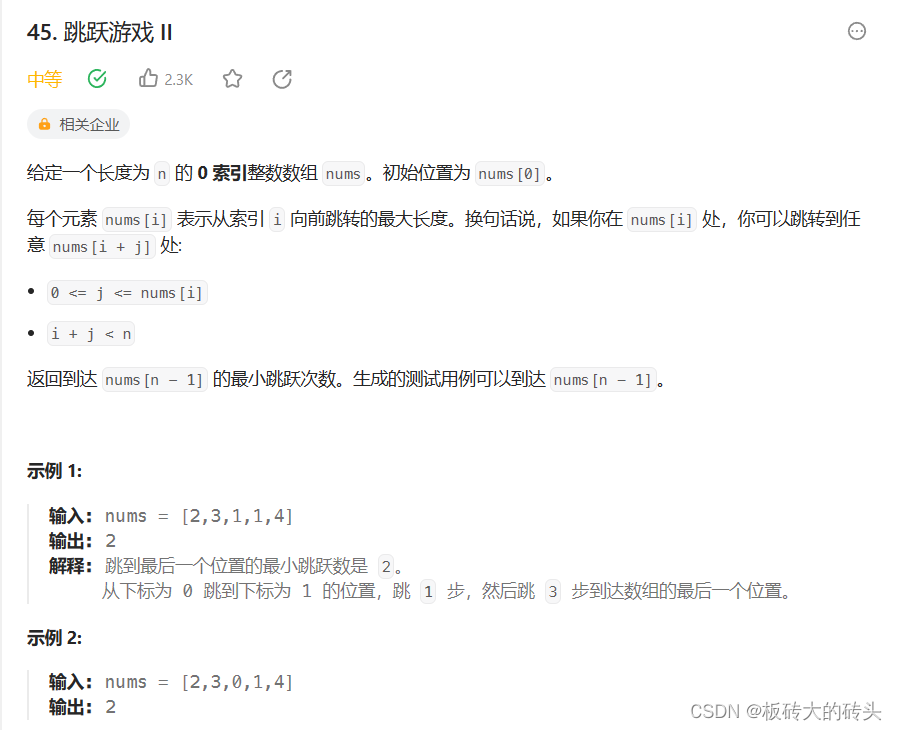
LeetCode(力扣)45. 跳跃游戏 IIPython
LeetCode45. 跳跃游戏 II 题目链接代码 题目链接 https://leetcode.cn/problems/jump-game-ii/description/ 代码 class Solution:def jump(self, nums: List[int]) -> int:if len(nums) 1:return 0curdis 0nextdis 0step 0for i in range(len(nums)):nextdis max(…...

mysql5.8 免安装版(压缩包)win10 安装
目录 1、下载MySQL5.82、如何安装、配置my.ini配置注意 3初始化mysql3.1. 初始化mysql3.2. 安装mysql服务3.3. 启动mysql3.4. 登录mysql3.5. 修改root密码3.6. 配置远程连接 Mysql5.8安装踩坑记录,推荐使用Docker安装,我是电脑虚拟化可能会蓝屏没用这个功…...
STM32-HAL库06-硬件IIC驱动FM24CL16B非易失存储器
STM32-HAL库06-IIC驱动FM24CL16B非易失存储器 一、所用材料: STM32VGT6自制控制板 STM32CUBEMX(HAL库软件) MDK5 二、所学内容: 通过HAL库的硬件IIC对FM24CL16B存储器进行写与读取操作。 三、CUBEMX配置: 第一步…...
python-wordcloud词云
导入模块 from wordcloud import WordCloud import jieba import imageio import matplotlib.pyplot as plt from PIL import ImageGrab import numpy as npwordcloud以空格为分隔符号,来将文本分隔成单词 PIL pillow模块 img imageio.imread(image.png)这行代码…...

单元测试与自测
单元测试在百度百科的定义: 自测在百度百科的定义: 单元测试是测一个类或一个函数,自立门第main函数,不依赖于项目,预期的是这个类或函数是没有问题的。程序编码完成之后至各种测试再到用户使用出现的任何bug都是单元测…...
2023-09-12 LeetCode每日一题(课程表 IV)
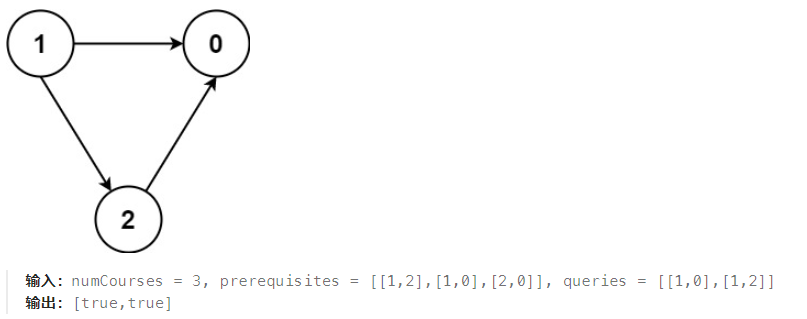
2023-03-29每日一题 一、题目编号 1462. 课程表 IV二、题目链接 点击跳转到题目位置 三、题目描述 你总共需要上 numCourses 门课,课程编号依次为 0 到 numCourses-1 。你会得到一个数组 prerequisite ,其中 prerequisites[i] [ai, bi] 表示如果你…...
RabbitMQ基础
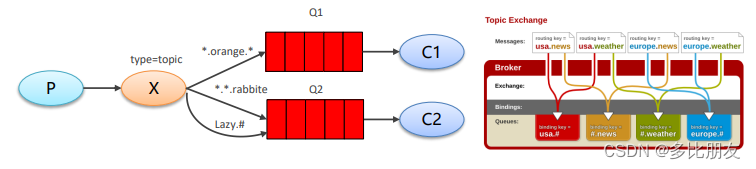
目录 MQ MQ概述 MQ 的优势 1.应用解耦 2.异步提速 3.削峰填谷 MQ 的劣势 1.系统可用性降低 2.系统复杂度提高 3.一致性问题 使用 MQ 需要满足什么条件呢? RabbitMQ 简介 编辑RabbitMQ 中的相关概念 RabbitMQ 提供了 6 种工作模式 JMS java实现Ra…...
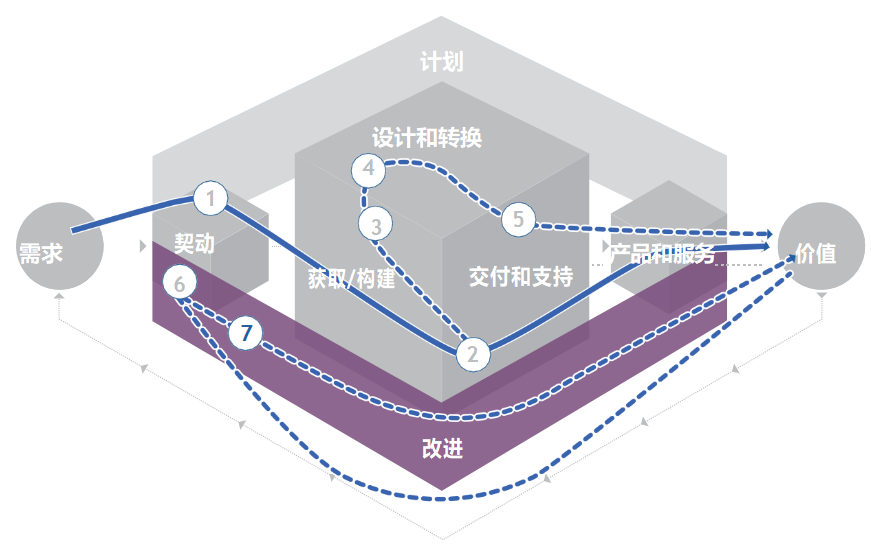
ITIL 4—创建、交付和支持—创建、交付和支持服务的价值流
4. 创建、交付和支持服务的价值流 本章节提供了有关如何: 记录一个价值流以理解工作流程如何贯穿该组织了解创建一个新服务的原型价值流了解支持一个现场服务的原型价值流 本章将帮助从业者理解: 价值流在 服务价值系统(SVS) 中的作用价值流的分类如…...

微信怎么给自己发消息
前段时间看到一份数据调查,说是到目前为止,全球使用微信的用户已达到10亿多人次,天啊,多么强大的用户群体! 这么多人喜欢使用微信,相信大家都知道,微信里面有一个特俗功能,可以自己…...
那些鲜为人知的“前世今生”)
从多媒体到HPC:聊聊IBM GPFS(Spectrum Scale)那些鲜为人知的“前世今生”
从多媒体到HPC:IBM GPFS的技术进化与商业智慧 1993年,当第一代数字视频编辑系统还在为处理480p分辨率视频而焦头烂额时,IBM实验室里的一组工程师正在解决一个更根本的问题——如何让多个工作站同时高效访问同一组视频素材。这个看似简单的需求…...

【Claude JavaScript开发支持终极指南】:20年前端架构师亲测的5大生产力跃迁技巧
更多请点击: https://intelliparadigm.com 第一章:Claude JavaScript开发支持的演进与定位 Claude 系列模型自发布以来,持续增强对前端及全栈开发场景的理解能力,其中 JavaScript 作为核心支持语言之一,其支持深度随版…...

FinRL_Podracer:基于深度强化学习的高性能量化交易框架解析
1. 项目概述:当强化学习遇上量化交易最近几年,量化交易圈子里有个词儿越来越热,那就是“强化学习”。你可能听说过AlphaGo下围棋,或者AI在星际争霸里打败人类高手,这些背后都是强化学习在发力。简单来说,它…...

长沙定制开发本地生活APP打造城市便民消费场景
随着长沙城市发展,市民对便民消费的需求越来越高,长沙本地生活APP定制开发也逐渐成为本地商家、政企单位布局数字化的重要选择。不同于通用模板APP,长沙定制本地生活APP可根据长沙本地特色,整合餐饮、生鲜、家政、休闲娱乐、政务便…...

移动SoC设计演进:从骁龙600/400系列看芯片战略与体验竞争
1. 从一场发布会看移动芯片的十年演进2015年2月,巴塞罗那世界移动通信大会前夕,高通的一则新闻稿在业内激起了不小的涟漪。他们宣布了全新的骁龙600和400系列移动平台,其中最引人注目的,是首次将当时ARM最新的64位Cortex-A72核心引…...

PheroPath:自定义代谢通路构建与可视化工具在组学数据分析中的应用
1. 项目概述与核心价值最近在生物信息学和计算生物学领域,一个名为“PheroPath”的项目引起了我的注意。这个项目由用户starpig1129托管,从名字上就能嗅到一丝“信息素”和“路径”结合的味道。作为一名长期在组学数据分析、特别是代谢通路研究一线摸爬滚…...
)
服务器卡死别慌!手把手教你读懂NMI watchdog的soft lockup报错信息(附CentOS 7排查流程)
服务器卡死应急指南:NMI watchdog与soft lockup实战排查手册 凌晨三点,机房告警铃声大作,监控大屏上某台核心服务器的CPU使用率突然飙升至100%并持续不降。登录系统后,dmesg中赫然出现NMI watchdog: BUG: soft lockup - CPU#2 stu…...

BioClaw:基于自然语言对话的生物信息学智能分析平台
1. 项目概述:BioClaw,一个能聊天的生物信息学工具箱 如果你是一名生物医学领域的研究者,我猜你对下面这个场景一定不陌生:你刚拿到一批测序数据,需要先跑个FastQC看看质量;同时,实验室的师弟在…...

JPlag代码抄袭检测工具:如何高效识别17种编程语言的代码抄袭行为
JPlag代码抄袭检测工具:如何高效识别17种编程语言的代码抄袭行为 【免费下载链接】JPlag State-of-the-Art Source Code Plagiarism & Collusion Detection. Check for plagiarism in a set of programs. 项目地址: https://gitcode.com/gh_mirrors/jp/JPlag …...

工程师视角:最低成本脱碳路径与气候解决方案的工程化思维
1. 项目概述:一封关于气候与经济的公开信最近在EE Times上读到一封写给埃隆马斯克的公开信,作者格伦温瑞布提出了一些关于气候变化和联邦预算赤字的想法,挺有意思的。这封信的核心不是空谈环保理念,而是从一个工程师和务实主义者的…...