CUDA小白 - NPP(8) 图像处理 Morphological Operations
cuda小白
原始API链接 NPP
GPU架构近些年也有不少的变化,具体的可以参考别的博主的介绍,都比较详细。还有一些cuda中的专有名词的含义,可以参考《详解CUDA的Context、Stream、Warp、SM、SP、Kernel、Block、Grid》
常见的NppStatus,可以看这里。
7 是图像的傅里叶变换,还在学习中
本文主要讲述的是形态学变换
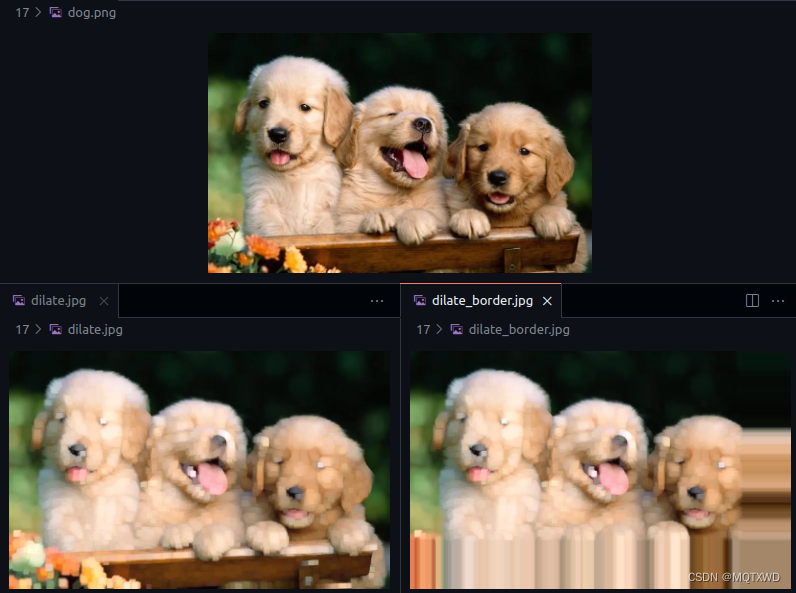
Dilation
膨胀操作(对二值化物体边界点进行扩充,将与物体接触的所有背景点合并到该物体中,使边界向外部扩张。如果两个物体间隔较近,会将两物体连通在一起。)
// 返回mask下的最大像素值作为输出的pixel,如果mask的值为0,则不参与最大值查询
NppStatus nppiDilate_8u_C3R(const Npp8u *pSrc,Npp32s nSrcStep,Npp8u *pDst,Npp32s nDstStep,NppiSize oSizeROI,const Npp8u *pMask,NppiSize oMaskSize,NppiPoint oAnchor);
// 与前一个接口的区别是多了一个borderType的类型指定
/*
NppiBorderType {NPP_BORDER_UNDEFINED,NPP_BORDER_NONE,NPP_BORDER_CONSTANT,NPP_BORDER_REPLICATE,NPP_BORDER_WARP,NPP_BORDER_MIRROR
};
*/
NppStatus nppiDilateBorder_8u_C3R(const Npp8u *pSrc,Npp32s nSrcStep,NppiSize oSrcSize,NppiPoint oSrcOffset,Npp8u *pDst,Npp32s nDstStep,NppiSize oSizeROI,const Npp8u *pMask,NppiSize oMaskSize,NppiPoint oAnchor,NppiBorderType eBorderType);
// 特定大小的kernel
NppStatus nppiDilate3x3_8u_C3R(const Npp8u *pSrc,Npp32s nSrcStep,Npp8u *pDst,Npp32s nDstStep,NppiSize oSizeROI);
code
#include <iostream>
#include <cuda_runtime.h>
#include <npp.h>
#include <opencv2/opencv.hpp>#define CUDA_FREE(ptr) { if (ptr != nullptr) { cudaFree(ptr); ptr = nullptr; } }int main() {std::string directory = "../";cv::Mat image_dog = cv::imread(directory + "dog.png");int image_width = image_dog.cols;int image_height = image_dog.rows;int image_size = image_width * image_height;// =============== device memory ===============// inputuint8_t *in_image;cudaMalloc((void**)&in_image, image_size * 3 * sizeof(uint8_t));cudaMemcpy(in_image, image_dog.data, image_size * 3 * sizeof(uint8_t), cudaMemcpyHostToDevice);// outputuint8_t *out_ptr1, *out_ptr2;cudaMalloc((void**)&out_ptr1, image_size * 3 * sizeof(uint8_t)); // 三通道cudaMalloc((void**)&out_ptr2, image_size * 3 * sizeof(uint8_t)); // 三通道NppiSize in_size;in_size.width = image_width;in_size.height = image_height;NppiRect rc;rc.x = 0;rc.y = 0;rc.width = image_width;rc.height = image_height;int mask_size = 10;cv::Mat mat_mask = cv::Mat::ones(mask_size, mask_size, CV_8UC1);uint8_t *mask;cudaMalloc((void**)&mask, mask_size * mask_size * sizeof(uint8_t));cudaMemcpy(mask, mat_mask.data, mask_size * mask_size * sizeof(uint8_t), cudaMemcpyHostToDevice);cv::Mat out_image = cv::Mat::zeros(image_height, image_width, CV_8UC3);NppStatus status;NppiSize npp_mask_size;npp_mask_size.width = mask_size;npp_mask_size.height = mask_size;NppiPoint pt;pt.x = 0;pt.y = 0;// =============== nppiDilate_8u_C3R ===============status = nppiDilate_8u_C3R(in_image, image_width * 3, out_ptr1, image_width * 3, in_size, mask, npp_mask_size, pt);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiDilate_8u_C3R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image.data, out_ptr1, image_size * 3, cudaMemcpyDeviceToHost);cv::imwrite(directory + "dilate.jpg", out_image);// =============== nppiDilateBorder_8u_C3R ===============NppiPoint src_pt;src_pt.x = 100;src_pt.y = 100;status = nppiDilateBorder_8u_C3R(in_image, image_width * 3, in_size, src_pt, out_ptr2, image_width * 3, in_size, mask, npp_mask_size, pt, NPP_BORDER_REPLICATE);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiDilateBorder_8u_C3R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image.data, out_ptr2, image_size * 3, cudaMemcpyDeviceToHost);cv::imwrite(directory + "dilate_border.jpg", out_image);// freeCUDA_FREE(in_image)CUDA_FREE(out_ptr1)CUDA_FREE(out_ptr2)
}
make
cmake_minimum_required(VERSION 3.20)
project(test)find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})find_package(CUDA REQUIRED)
include_directories(${CUDA_INCLUDE_DIRS})
file(GLOB CUDA_LIBS "/usr/local/cuda/lib64/*.so")add_executable(test test.cpp)
target_link_libraries(test${OpenCV_LIBS}${CUDA_LIBS}
)
result
注意:
- nppiDilateBorder_8u_C3R 仅支持border的模式为 NPP_BORDER_REPLICATE,其他模式会报错,错误码为-9999。
Erode
腐蚀操作
NppStatus nppiErode_8u_C3R(const Npp8u *pSrc,Npp32s nSrcStep,Npp8u *pDst,Npp32s nDstStep,NppiSize oSizeROI,const Npp8u *pMask,NppiSize oMaskSize,NppiPoint oAnchor);
NppStatus nppiErodeBorder_8u_C3R(const Npp8u *pSrc,Npp32s nSrcStep,NppiSize oSrcSize,NppiPoint oSrcOffset,Npp8u *pDst,Npp32s nDstStep,NppiSize oSizeROI,const Npp8u *pMask,NppiSize oMaskSize,NppiPoint oAnchor,NppiBorderType eBorderType);
// 固定大小的Erode
NppStatus nppiErode3x3_8u_C3R(const Npp8u *pSrc,Npp32s nSrcStep,Npp8u *pDst,Npp32s nDstStep,NppiSize oSizeROI);
// nppiErode3x3Border_8u_C3R 不详细介绍了
再此使用上一个实验膨胀之后的图像作为腐蚀的输入。
code
#include <iostream>
#include <cuda_runtime.h>
#include <npp.h>
#include <opencv2/opencv.hpp>#define CUDA_FREE(ptr) { if (ptr != nullptr) { cudaFree(ptr); ptr = nullptr; } }int main() {std::string directory = "../";cv::Mat image_dog = cv::imread(directory + "dilate.jpg");int image_width = image_dog.cols;int image_height = image_dog.rows;int image_size = image_width * image_height;// =============== device memory ===============// inputuint8_t *in_image;cudaMalloc((void**)&in_image, image_size * 3 * sizeof(uint8_t));cudaMemcpy(in_image, image_dog.data, image_size * 3 * sizeof(uint8_t), cudaMemcpyHostToDevice);// outputuint8_t *out_ptr1, *out_ptr2;cudaMalloc((void**)&out_ptr1, image_size * 3 * sizeof(uint8_t)); // 三通道cudaMalloc((void**)&out_ptr2, image_size * 3 * sizeof(uint8_t)); // 三通道NppiSize in_size;in_size.width = image_width;in_size.height = image_height;NppiRect rc;rc.x = 0;rc.y = 0;rc.width = image_width;rc.height = image_height;int mask_size = 10;cv::Mat mat_mask = cv::Mat::ones(mask_size, mask_size, CV_8UC1);uint8_t *mask;cudaMalloc((void**)&mask, mask_size * mask_size * sizeof(uint8_t));cudaMemcpy(mask, mat_mask.data, mask_size * mask_size * sizeof(uint8_t), cudaMemcpyHostToDevice);cv::Mat out_image = cv::Mat::zeros(image_height, image_width, CV_8UC3);NppStatus status;NppiSize npp_mask_size;npp_mask_size.width = mask_size;npp_mask_size.height = mask_size;NppiPoint pt;pt.x = 0;pt.y = 0;// =============== nppiErode_8u_C3R ===============status = nppiErode_8u_C3R(in_image, image_width * 3, out_ptr1, image_width * 3, in_size, mask, npp_mask_size, pt);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiErode_8u_C3R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image.data, out_ptr1, image_size * 3, cudaMemcpyDeviceToHost);cv::imwrite(directory + "erode.jpg", out_image);// =============== nppiErodeBorder_8u_C3R ===============NppiPoint src_pt;src_pt.x = 100;src_pt.y = 100;status = nppiErodeBorder_8u_C3R(in_image, image_width * 3, in_size, src_pt, out_ptr2, image_width * 3, in_size, mask, npp_mask_size, pt, NPP_BORDER_REPLICATE);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiErodeBorder_8u_C3R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image.data, out_ptr2, image_size * 3, cudaMemcpyDeviceToHost);cv::imwrite(directory + "erode_border.jpg", out_image);// freeCUDA_FREE(in_image)CUDA_FREE(out_ptr1)CUDA_FREE(out_ptr2)
}
make
cmake_minimum_required(VERSION 3.20)
project(test)find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})find_package(CUDA REQUIRED)
include_directories(${CUDA_INCLUDE_DIRS})
file(GLOB CUDA_LIBS "/usr/local/cuda/lib64/*.so")add_executable(test test.cpp)
target_link_libraries(test${OpenCV_LIBS}${CUDA_LIBS}
)
result
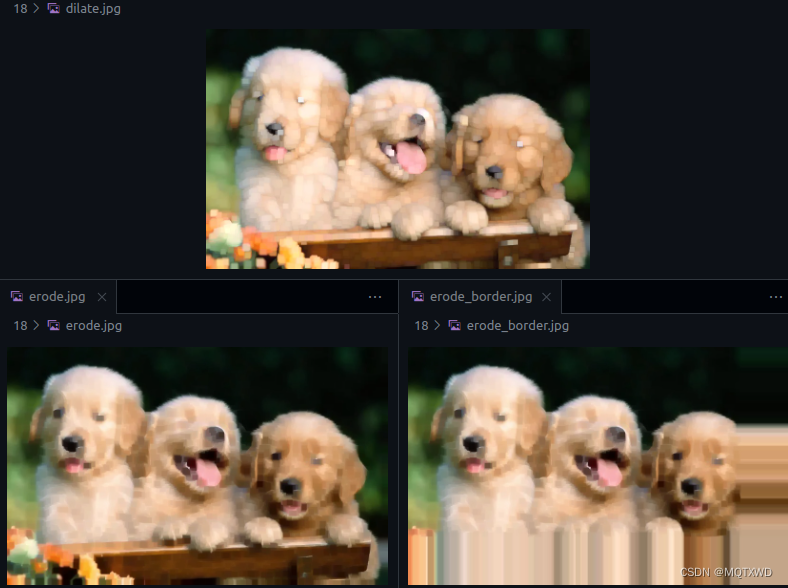
注意点:
- nppiErodeBorder_8u_C3R 仅支持border的模式为 NPP_BORDER_REPLICATE,其他模式会报错,错误码为-9999。
ComplexImageMorphology
复杂图像形态学,暂时不做介绍,后续视情况而定
<<<链接>>>
相关文章:
CUDA小白 - NPP(8) 图像处理 Morphological Operations
cuda小白 原始API链接 NPP GPU架构近些年也有不少的变化,具体的可以参考别的博主的介绍,都比较详细。还有一些cuda中的专有名词的含义,可以参考《详解CUDA的Context、Stream、Warp、SM、SP、Kernel、Block、Grid》 常见的NppStatus…...

java获取音频,文本准转语音时长
jar 以上传到资源中 <dependency><groupId>it.sauronsoftware</groupId><artifactId>jave</artifactId><version>1.0.2</version></dependency> mvn install:install-file -DfileD:\xxx\xxx\jave-1.0.2.jar -DgroupIdit.sauro…...
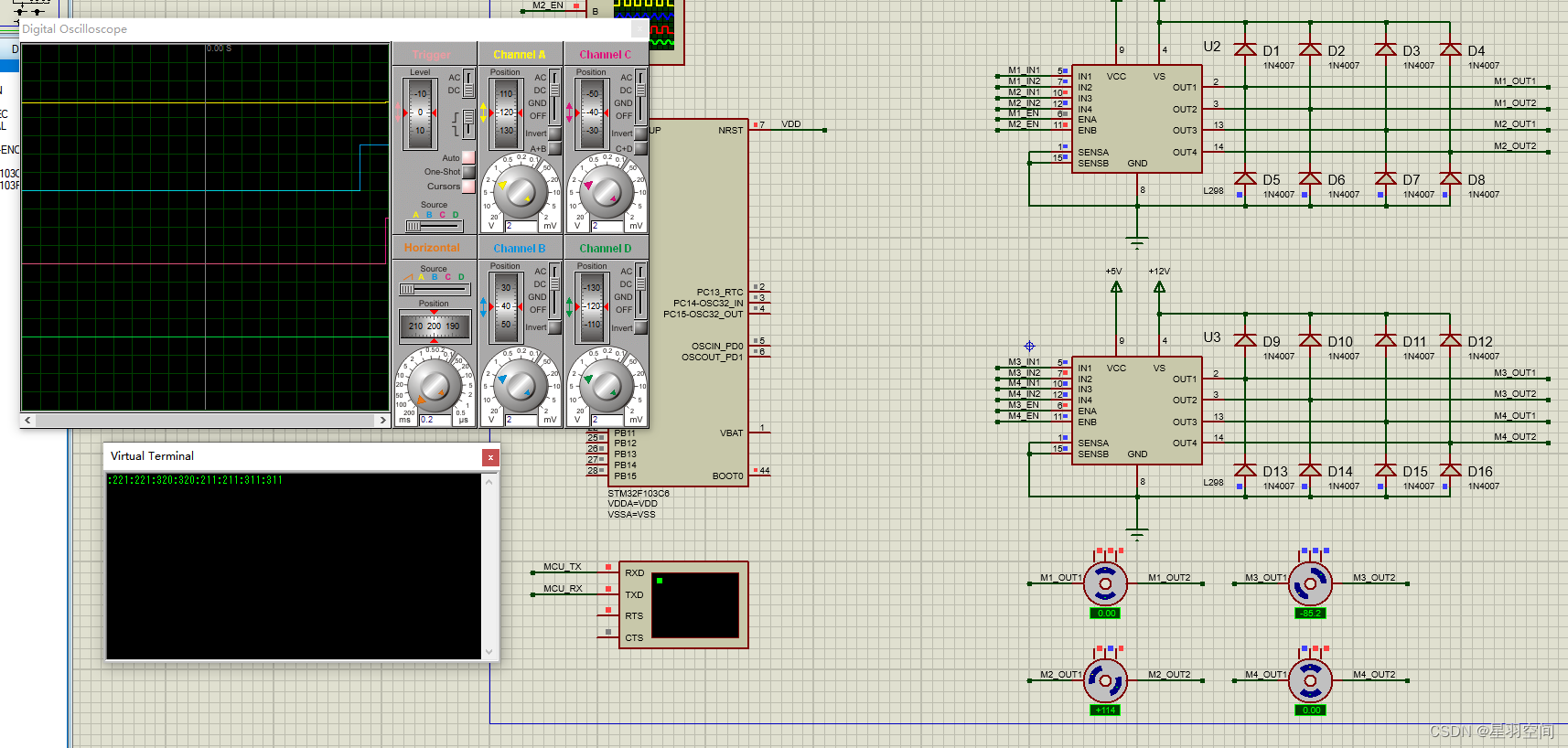
基于串口通讯的多电机控制技术研究
基于STM32CubeMX生成keil工程 基于proteus 8.7版本进行程序验证 采用了简单的串口通讯协议 基本效果如图 先对电机旋转方向进行指令设置 :221 :320 分别实现对第二个电机正转、第三个电机反转设置 为了方便观测,程序对接受到的串口数据会进行回显。 然后使能电…...
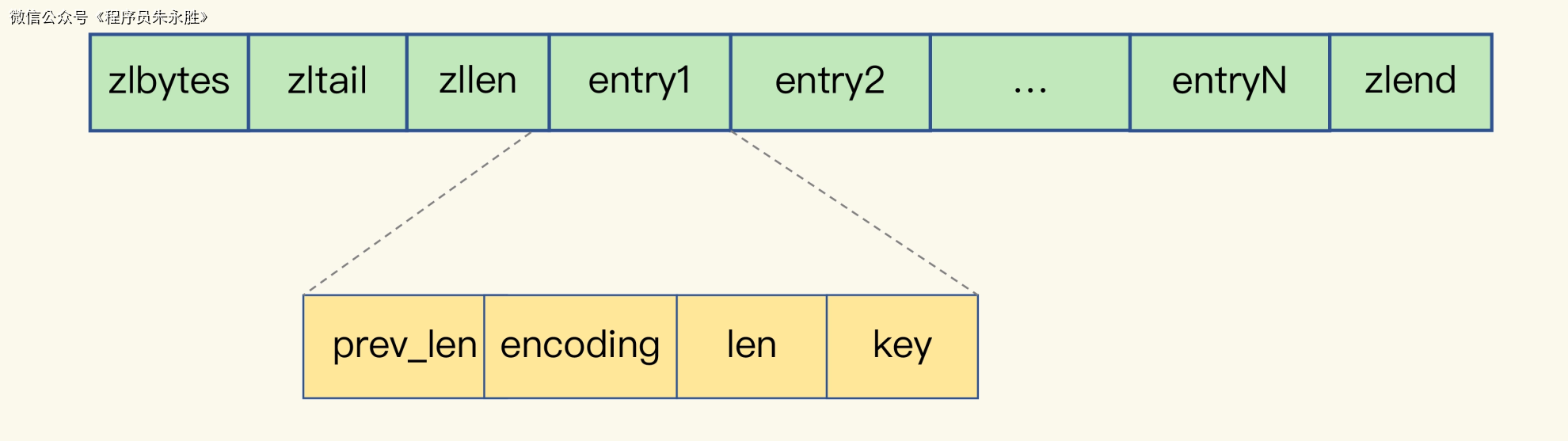
【深入解读Redis系列】(五)Redis中String的认知误区,详解String数据类型
有时候博客内容会有变动,首发博客是最新的,其他博客地址可能会未同步,请认准https://blog.zysicyj.top 首发博客地址 系列文章地址 需求描述 现在假设有这样一个需求,我们要开发一个图像存储系统。要求如下: 该系统能快…...

段指导-示例
RDBMS 19.20 参考文档: Database Administrator’s Guide 19 Managing Space for Schema Objects 19.3.2.4 Running the Segment Advisor Manually 针对表SOE.CUSTOMERS进行段指导 -- 创建段指导 variable id number; begindeclarename varchar2(100);descr …...

LeetCode 面试题 04.02. 最小高度树
文章目录 一、题目二、C# 题解 一、题目 给定一个有序整数数组,元素各不相同且按升序排列,编写一个算法,创建一棵高度最小的二叉搜索树。 点击此处跳转题目。 示例: 给定有序数组: [-10,-3,0,5,9], 一个可能的答案是:[0,-3,9,-10…...

华为云云耀云服务器L实例评测|初始化centos镜像到安装nginx部署前端vue、react项目
文章目录 ⭐前言⭐购买服务器💖 选择centos镜像 ⭐在控制台初始化centos镜像💖配置登录密码 ⭐在webstorm ssh连接 服务器⭐安装nginx💖 wget 下载nginx💖 解压运行 ⭐添加安全组⭐nginx 配置⭐部署vue💖 使用默认的ng…...
python项目制作docker镜像,加装引用模块,部署运行!
一、创建Dockerfile # 基于python:3.10.4版本创建容器 FROM python:3.10.4 # 在容器中创建工作目录 RUN mkdir /app # 将当前Dockerfile目录下的所有文件夹和文件拷贝到容器/app目录下 COPY . /app# 由于python程序用到了requests模块和yaml模块, # python:3.10.4基…...
Redis缓存设计与性能优化
多级缓存架构 缓存设计 缓存穿透 缓存穿透是指查询一个根本不存在的数据, 缓存层和存储层都不会命中, 通常出于容错的考虑, 如果从存储层查不到数据则不写入缓存层。缓存穿透将导致不存在的数据每次请求都要到存储层去查询, 失去…...
免杀对抗-Python-混淆算法+反序列化-打包生成器-Pyinstall
Python-MSF/CS生成shellcode-上线 cs上线 1.生成shellcode-c或者python 2.打开pycharm工具,创建一个py文件,将原生态执行代码复制进去 shellcode执行代码: import ctypesfrom django.contrib.gis import ptr#cs#shellcodebytearray(b"生…...

C#__线程池的简单介绍和使用
/*线程池原理:(有备无患的默认备用后台线程)特点:线程提前建好在线程池;只能用于运行时间较短的线程。*/class Program{static void Main(string[] args){for (int i 0; i < 10; i){ThreadPool.QueueUserWorkItem(Download); …...
)
安全员(岗位职责)
一、 安全员 是工程项目安全生产、文明施工的直接管理者和责任人,在业务上向 公司 负责; 二、贯彻安全条例和文明施工标准是安全员 工作 准则,执行相关规章、规程是安全员的责任; 三、办理开工前安全监审和安全开工审批,编制项目工程安全监督计划,上报安全措施和分项工程安全施…...
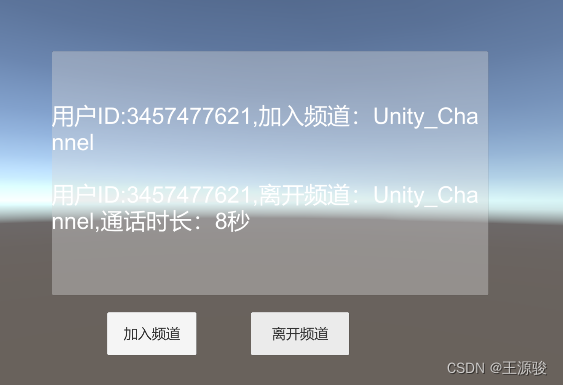
unity 使用声网(Agora)实现语音通话
第一步、先申请一个声网账号 [Agora官网链接](https://console.shengwang.cn/) 第二步在官网创建项目 ,选择无证书模式,证书模式需要tokenh和Appld才能通话 第三步 官网下载SDK 然后导入到unity,也可以直接在unity商店…...
vue2.X 中使用 echarts5.4.0实现项目进度甘特图
vue2.X 中使用 echarts5.4.0实现项目进度甘特图 效果图: 左侧都是名称,上面是时间,当中的内容是日志内容 组件: gantt.vue <template><div id"main" style"width: 100%; height: 100%"></…...

《PostgreSQL与NoSQL:合作与竞争的关系》
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🐅🐾猫头虎建议程序员必备技术栈一览表📖: 🛠️ 全栈技术 Full Stack: 📚…...

【FAQ】视频监控管理平台/视频汇聚平台EasyCVR安全检查相关问题及解决方法3.0
智能视频监控系统/视频云存储/集中存储/视频汇聚平台EasyCVR具备视频融合汇聚能力,作为安防视频监控综合管理平台,它支持多协议接入、多格式视频流分发,视频监控综合管理平台EasyCVR支持海量视频汇聚管理,可应用在多样化的场景上&…...

Java 8 新特性解读及应用实践
Java 8 新特性解读及应用实践 一、简介二、Lambda表达式三、流式编程四、日期/时间API1. 概述2. LocalDate、LocalTime、LocalDateTime等类的使用3. 格式化与解析 五、重复注解和类型注解1. 概念与作用2. 重复注解实例3. 类型注解实例 六、小结回顾 一、简介 Java 8带来了众多…...

C++项目实战——基于多设计模式下的同步异步日志系统-④-日志系统框架设计
文章目录 专栏导读模块划分日志等级模块日志消息模块日志消息格式化模块日志消息落地模块日志器模块日志器管理模块异步线程模块 模块关系图 专栏导读 🌸作者简介:花想云 ,在读本科生一枚,C/C领域新星创作者,新星计划导…...

计算机专业毕业设计项目推荐02-个人医疗系统(Java+原生Js+Mysql)
个人医疗系统(Java原生JsMysql) **介绍****系统总体开发情况-功能模块****各部分模块实现** 介绍 本系列(后期可能博主会统一为专栏)博文献给即将毕业的计算机专业同学们,因为博主自身本科和硕士也是科班出生,所以也比较了解计算机专业的毕业设计流程以…...

Nginx__高级进阶篇之LNMP动态网站环境部署
动态网站和LNMP(LinuxNginxMySQLPHP)都是用于建立和运行 web 应用程序的技术。 动态网站是通过服务器端脚本语言(如 PHP、Python、Ruby等)动态生成网页内容的网站。通过这种方式,动态网站可以根据用户的不同请求生成不…...

PDPI Spec:规格驱动开发协议,让AI编程告别“氛围编码”
1. 项目概述:从“感觉对了”到“规格对了”在软件开发的江湖里,我们可能都经历过这样的场景:产品经理丢过来一个模糊的需求,开发同学凭着一腔热血和“感觉对了”的直觉,一头扎进代码里。几周后,功能上线了&…...

基于Vike+React+Mantine构建现代文档站:架构解析与工程实践
1. 项目概述:从零构建 SurrealDB 官方文档站的技术选型与架构最近在梳理 SurrealDB 官方文档站(docs.surrealdb.com)的源码,发现它是一个非常典型的现代技术栈组合案例。项目基于 Vike React Mantine 构建,并集成了 …...

AI助手碳核算技能:基于MCP协议与CCDB数据库的实战指南
1. 项目概述:当AI助手学会“碳核算” 如果你是一名开发者、数据分析师,或者任何需要处理碳排放相关工作的从业者,最近可能被一个词频繁刷屏:AI Agent。我们总希望手边的AI编程助手(比如Cursor、Claude Code࿰…...

波色量子获18.4亿融资,1000量子比特计算机让肿瘤切缘识别、脑电解码大提速!
【导语:科幻电影中令人惊叹的量子计算机,如今已从实验室走向商业化落地。波色量子成立三年获11轮融资,累计金额达18.4亿元。其量子计算能力在多个行业实现应用,尤其在生命科学领域展现出巨大潜力。】波色量子:资本竞逐…...

企业安全运维:轻量级OpenClaw检测脚本的设计、部署与MDM集成实战
1. 项目概述:为什么我们需要一个轻量级的OpenClaw检测脚本?在当今的企业IT环境中,开发工具和AI辅助编程代理的普及带来了前所未有的效率提升,但同时也引入了新的安全与合规盲区。想象一下,一个未经批准的开发工具&…...

从零上手向量数据库:基于Pinecone官方示例构建AI应用实战指南
1. 项目概述:从零上手向量数据库与AI应用开发如果你对AI应用开发感兴趣,尤其是想了解如何让大语言模型(LLM)拥有“记忆”,或者想构建一个能理解语义而非关键词的智能搜索系统,那么你很可能已经听说过“向量…...

深入解析WeChatFerry:基于RPC与进程注入的微信自动化框架
1. 项目概述:一个为微信自动化而生的强力引擎如果你正在寻找一个能够稳定、高效地控制微信客户端进行自动化操作的解决方案,那么lich0821/WeChatFerry这个项目绝对值得你花时间深入研究。它不是一个简单的消息发送工具,而是一个基于 RPC&…...

DDrawCompat:让经典DirectX游戏在Windows 11重获新生的技术桥梁
DDrawCompat:让经典DirectX游戏在Windows 11重获新生的技术桥梁 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_mirrors/…...

AI编程助手色彩科学技能库:从OKLCH到APCA的现代色彩实践
1. 项目概述:一个为AI编程助手打造的“色彩科学专家”技能库如果你和我一样,经常在开发与色彩相关的工具、设计系统,或者需要向团队解释为什么某个颜色方案行不通时,总得反复查阅同一堆资料——那个讲解OKLAB色彩空间的视频、那篇…...

从JLink驱动安装失败,聊聊老旧Win7系统下嵌入式工具链的“版本锁定”现象
从JLink驱动安装失败看嵌入式工具链的版本锁定困境 当你在Windows 7系统上尝试安装最新版JLink驱动时,那个顽固的黄色感叹号是否曾让你抓狂?这看似简单的驱动问题背后,隐藏着一个困扰嵌入式开发领域多年的系统性难题——工具链的版本锁定现象…...