IO和进程day08(消息队列、共享内存、信号灯集)
今日任务

1.代码
inversion.c
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/ipc.h>
#include <sys/shm.h>
#include <sys/types.h>
#include <sys/sem.h>int main(int argc, const char *argv[])
{//创建打开共享内存//1.生成keykey_t key=ftok("./",1);if(-1==key){perror("key");return -1;}//2.获取id号int shmId=shmget(key,128,IPC_CREAT|0664);if(-1==shmId){perror("shmget");return -1;}//3.获取映射地址void* addr=shmat(shmId,NULL,0);if((void *)-1==addr){perror("shmat");return -1;}char *q=(char*)addr;//创建信号量集,共创建两灯://0:初始值为1,负责打印,打印前0号灯-1;打印结束,1号灯+1;//1:初始值为0,负责逆置,逆置前1号灯-1;逆置结束,0号灯+1;int semId=semget(key,2,IPC_CREAT|0664);if(-1==semId){perror("semId");return -1;}struct sembuf sops={0,1,0};if(-1==semop(semId,&sops,1)){perror("semop");return -1;}puts("初始化完成");struct sembuf p={1,-1,0};//1号灯-1struct sembuf v={0,1,0};//0号灯+1while(1){//逆置if(-1==semop(semId,&p,1)){perror("semop p");return -1;}//操作for (int i=0; i<strlen(q)/2; i++){char temp=*(q+i);*(q+i)=*(q+strlen(q)-1-i);*(q+strlen(q)-1-i)=temp;}if(-1==semop(semId,&v,1)){perror("semop p");return -1;}}return 0;
}
print.c
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/ipc.h>
#include <sys/shm.h>
#include <sys/types.h>
#include <sys/sem.h>
#include <unistd.h>int main(int argc, const char *argv[])
{//创建打开共享内存//1.生成keykey_t key=ftok("./",1);if(-1==key){perror("key");return -1;}//2.获取id号int shmId=shmget(key,128,IPC_CREAT|0664);if(-1==shmId){perror("shmget");return -1;}//3.获取映射地址void* addr=shmat(shmId,NULL,0);if((void *)-1==addr){perror("shmat");return -1;}strcpy((char*)addr,"1234567");//创建信号量集,共创建两灯://0:初始值为1,负责打印,打印前0号灯-1;打印结束,1号灯+1;//1:初始值为0,负责逆置,逆置前1号灯-1;逆置结束,0号灯+1;int semId=semget(key,2,IPC_CREAT|0664);if(-1==semId){perror("semId");return -1;}struct sembuf sops={0,1,0};if(-1==semop(semId,&sops,1)){perror("semop");return -1;}puts("初始化完成");struct sembuf p={0,-1,0};//0号灯-1struct sembuf v={1,1,0};//1号灯+1while(1){//打印,if(-1==semop(semId,&p,1)){perror("semop p");return -1;}//操作sleep(1);printf("%s\n",(char*)addr);if(-1==semop(semId,&v,1)){perror("semop p");return -1;}}return 0;
}
运行结果:
今日思维导图
明日即考,量多待复,汝甚忧之
相关文章:
IO和进程day08(消息队列、共享内存、信号灯集)
今日任务 1.代码 inversion.c #include <stdio.h> #include <string.h> #include <stdlib.h> #include <sys/types.h> #include <sys/ipc.h> #include <sys/ipc.h> #include <sys/shm.h> #include <sys/types.h> #include …...

【数据结构】—堆排序以及TOP-K问题究极详解(含C语言实现)
食用指南:本文在有C基础的情况下食用更佳 🔥这就不得不推荐此专栏了:C语言 ♈️今日夜电波:ルミネセンス—今泉愛夏 1:01 ━━━━━━️💟──────── 5:05 …...

Python语言概述
视频版教程 Python3零基础7天入门实战视频教程 Python作为一门非常流行的高级编程语言,自从22年开始,TIOBE编程语言排行榜Python一直排第一。 Python简洁高效,丰富的应用场景,受到广大程序员,科研工作者的喜爱。 …...

电子电路学习笔记之NCV84120DR2G——车规级单通道高压侧驱动器
关于车规级芯片: 关于车规级芯片(Automotive Grade Chip),车规级芯片是专门用于汽车行业的芯片,具有高可靠性、高稳定性和低功耗等特点,以满足汽车电子系统的严格要求。这些芯片通常用于车载电子控制单元&…...

YOLO DNF辅助教程完结
课程完结!撒花、撒花、撒花 课程完结!撒花、撒花、撒花 课程完结!撒花、撒花、撒花 呕心沥血三个月,《利用人工智能做DNF游戏辅助》系列实战课程已完结,技术路线贯穿串口通信、目标检测、opencv特征匹配等前沿技术…...

Hadoop-Hive
1. hive安装部署 2. hive基础 3. hive高级查询 4. Hive函数及性能优化 1.hive安装部署 解压tar -xvf ./apache-hive-3.1.2-bin.tar.gz -C /opt/soft/ 改名mv apache-hive-3.1.2-bin/ hive312 配置环境变量:vim /etc/profile #hive export HIVE_HOME/opt/soft/hive…...
竞赛 基于机器视觉的火车票识别系统
文章目录 0 前言1 课题意义课题难点: 2 实现方法2.1 图像预处理2.2 字符分割2.3 字符识别部分实现代码 3 实现效果最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 基于机器视觉的火车票识别系统 该项目较为新颖,适合作为竞赛…...

conda与pip镜像源环境配置
文章目录 一. 参考二. conda三. pip 一. 参考 b站环境配置视频 校园网镜像站 二. conda 利用校园网镜像站, 找到conda的镜像源配置文档. 将下面的文档复制到电脑上的.condarc文件中. channels:- defaults show_channel_urls: true default_channels:- https://mirrors.tuna…...

Golang1.21更新内容全面介绍~
我的掘金平台原文地址Golang1.21更新内容全面介绍~ 前言 在Golang1.21这一次更新中,主要更新内容为: for range的一个语义变更 、 新加入max、min、clear方法、 contenxt增添api、 WASI的支持 本文主要带大家熟悉这些变更的内容~ 1.for语义的变更…...
ArcGIS 10.4安装教程!
软件介绍:ArcGIS是一款专业的电子地图信息编辑和开发软件,提供一种快速并且使用简单的方式浏览地理信息,无论是2D还是3D的信息。软件内置多种编辑工具,可以轻松的完成地图生产全过程,为地图分析和处理提供了新的解决方…...

华为云云服务器云耀L实例评测 | 从零开始:华为云云服务器L实例使用教程
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

ElasticSearch配置
2) 搭建ElasticSearch环境 2.1) 拉取镜像 docker pull elasticsearch:7.4.02.2) 创建容器 docker run -id --name elasticsearch -d --restartalways -p 9200:9200 -p 9300:9300 -v /usr/share/elasticsearch/plugins:/usr/share/elasticsearch/plugins -e "discovery.…...

MySQL优化第二篇
MySQL优化第二篇 性能分析小表驱动大表慢查询日志日志分析工具mysqldumpslow Show Profile进行SQL分析(重中之重) 七种JOIN 1、inner join :可以简写为join,表示的是交集,也就是两张表的共同数据 sql语句:…...
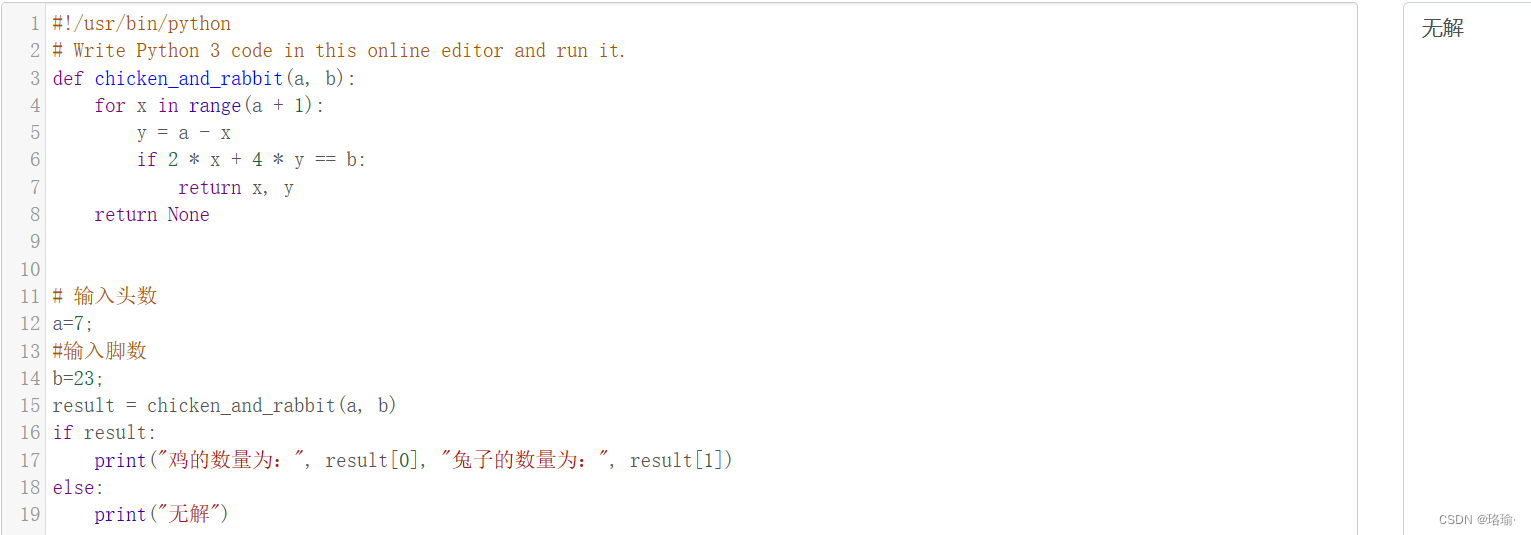
基于python解决鸡兔同笼问题
一、什么是鸡兔同笼问题? 鸡兔同笼问题是一个经典的数学问题。问题描述:鸡和兔子共有头数a和脚数b,求鸡和兔子的数量。 解析:设鸡的数量为x,兔子的数量为y,那么可以得到以下两个方程: 1. x y…...

2023 Google 开发者大会|Mobile开发专题追踪
文章目录 前言大会介绍涉及内容MobileWebAICloud Mobile开发专题多终端应用的开发适配大屏视频流可穿戴设备电视新的设计中心 构建高质量的应用高级相机和媒体功能用户的安全和隐私更精细的视觉体验 小结 前言 哈喽大家好,我是阿Q。近期,【2023 Google …...

最新版WPS 2023 加载Zotero方法
安装wps2019vba.exe,获取链接:链接:https://pan.baidu.com/s/1eeoc6Tmwyzxh3n1MFQTVeA 提取码:6431 –来自百度网盘超级会员V8的分享 打开WPS的工具的加载项 添加文件路径,我的在: C:\Users\Administrat…...

详解爬虫策略,反爬虫策略,反反爬爬虫策略
爬虫策略 爬取策略是网络爬虫在执行网页抓取任务时所遵循的规则或策略。这些策略决定了爬虫如何从一个页面转到另一个页面,什么时间进行抓取,以及应该抓取哪些内容。以下是几种常见的爬取策略: 深度优先搜索(DFS) 在…...

ES6中的Promise对象
1. Promise是什么 Promise简单来说就是一个容器,里面保存着未来才会结束的事件的结果(这个事件就是异步操作)。Promise是一个对象(构造函数),可以获取异步操作的结果。 特点: 对象的状态不受外…...

vue 知识点———— 生命周期
1.什么是生命周期 Vue实例从创建到销毁的过程,叫生命周期。 从开始创建、初始化数据、编译模版、挂载Dom-渲染、更新-渲染、销毁等过程。 2.生命周期一共有几个阶段 创建前/后, 载入前/后,更新前/后,销毁前/销毁后 3.初始化相关属性 beforeCreate(创建前…...
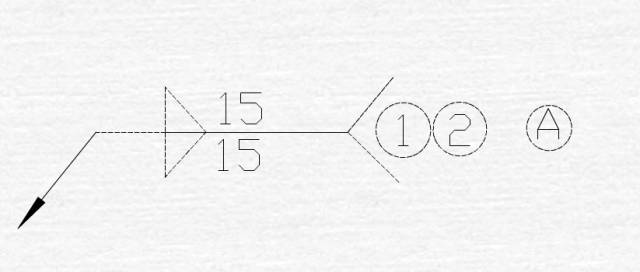
焊接符号学习
欧美焊接符号举例 4.5------表示焊点直径 【3】------根据图示说明,表示此项为CC项或者SC项 6-------表示此处为第六CC项或者SC项 BETWEEN①AND②------表示①件和②件俩点之间的焊点 12X------表示俩点之间的焊点个数为12个 日本焊接符号举例 A------根据图示&…...

别再死记硬背ATT报文了!用Wireshark抓包实战,带你搞懂BLE通信里Handle和UUID的映射过程
实战拆解BLE通信:用Wireshark透视Handle与UUID的动态映射 当你第一次看到BLE设备通信时,那些十六进制数字在屏幕上闪烁,就像在看天书。Handle、UUID、ATT报文——这些概念在文档里写得清清楚楚,但真正抓包分析时,却总感…...

AI智能证件照制作工坊高可用部署:生产环境配置建议
AI智能证件照制作工坊高可用部署:生产环境配置建议 1. 项目概述与核心价值 AI智能证件照制作工坊是一个商业级证件照生产工具,基于Rembg高精度抠图引擎构建。这个工具能够将普通的生活照或自拍照,通过全自动流程转换为符合标准的证件照&…...

别再只盯着准确率了!手把手教你用Python实现NDCG和MAP,搞定搜索推荐系统评估
别再只盯着准确率了!手把手教你用Python实现NDCG和MAP,搞定搜索推荐系统评估 当你在优化推荐算法时,是否曾为选择评估指标而纠结?准确率、召回率这些传统指标虽然直观,却无法捕捉排序质量这一关键维度。本文将带你深入…...

Html2Pdf高性能转换引擎:PHP 7.2-8.4全版本兼容的企业级HTML转PDF解决方案
Html2Pdf高性能转换引擎:PHP 7.2-8.4全版本兼容的企业级HTML转PDF解决方案 【免费下载链接】html2pdf OFFICIAL PROJECT | HTML to PDF converter written in PHP 项目地址: https://gitcode.com/gh_mirrors/ht/html2pdf 在当今企业数字化转型浪潮中…...
)
避坑指南:.NET MAUI页面跳转最常见的5个坑点及解决方案(2023最新版)
.NET MAUI页面导航避坑实战:5个高频问题与工业级解决方案 刚接触.NET MAUI的开发者常会在页面跳转环节踩坑——传参莫名丢失、导航堆栈突然崩溃、模态窗口关闭失效...这些问题往往消耗大量调试时间。本文将结合GitHub高星issue和StackOverflow热帖,拆解5…...

如何用FCEUX重温经典游戏?全场景部署指南
如何用FCEUX重温经典游戏?全场景部署指南 【免费下载链接】fceux FCEUX, a NES Emulator 项目地址: https://gitcode.com/gh_mirrors/fc/fceux 为什么选择FCEUX模拟器?🎮 在众多NES模拟器中,FCEUX凭借三大核心优势脱颖而出…...
)
工业相机+Python视觉系统崩溃频发?(产线停机损失超¥8600/小时的5个隐藏代码陷阱)
第一章:工业相机视觉系统崩溃的根源诊断工业相机视觉系统在产线部署中一旦突发崩溃,往往表现为图像丢失、帧率归零、设备离线或软件进程异常终止。此类故障表面随机,实则多由底层软硬件协同失配引发,需从驱动层、通信协议、资源调…...
)
从CentOS 7迁移到Ubuntu 22.04 LTS,我整理了一份保姆级系统初始化脚本(含内核调优、换源、时区设置)
从CentOS 7迁移到Ubuntu 22.04 LTS:系统初始化与性能调优全指南 当CentOS 7走向生命周期的终点,许多运维团队正面临向新平台的战略转移。Ubuntu 22.04 LTS以其长期支持特性和活跃的社区生态,成为最受欢迎的替代选择之一。但迁移绝非简单的系统…...
)
自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务书+实习报告+中期检查报告+外文翻译)
自动化立体仓库堆垛机作为现代物流系统的核心设备,其设计需兼顾机械结构强度、运动控制精度与系统稳定性。该设计通过三维建模与力学仿真验证,确保堆垛机在高速运行时的结构可靠性,同时优化货叉伸缩机构与载货台升降导轨的配合间隙࿰…...

根据您提供的写作范围,我为您总结的标题为:“昆通泰MCGS7.7嵌入版:6车位停车场监控系统仿...
6车位停车场监控系统昆通泰MCGS7.7嵌入版仿真运行带运行效果视频6车位停车场监控系统用昆通泰MCGS7.7嵌入版做仿真,真的是新手友好型项目——不用扛硬件、不用接复杂通讯,靠内部变量和几段脚本就能把核心逻辑跑通,还能直观看到实时效果&#…...