AI项目六:基于YOLOV5的CPU版本部署openvino
若该文为原创文章,转载请注明原文出处。
一、CPU版本DEMO测试
1、创建一个新的虚拟环境
conda create -n course_torch_openvino python=3.82、激活环境
conda activate course_torch_openvino3、安装pytorch cpu版本
pip install torch torchvision torchaudio -i https://pypi.tuna.tsinghua.edu.cn/simple
4、安装
使用的是yolov5-5版本,github上下载。
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
5、运行demo
python demo.py完整代码
import cv2
import numpy as np
import torch
import time# model = torch.hub.load('./yolov5', 'custom', path='./weights/ppe_yolo_n.pt',source='local') # local repo
model = torch.hub.load('./yolov5', 'custom', 'weights/poker_n.pt',source='local')
model.conf = 0.4cap = cv2.VideoCapture(0)fps_time = time.time()while True:ret,frame = cap.read()frame = cv2.flip(frame,1)img_cvt = cv2.cvtColor(frame,cv2.COLOR_BGR2RGB)# Inferenceresults = model(img_cvt)result_np = results.pandas().xyxy[0].to_numpy()for box in result_np:l,t,r,b = box[:4].astype('int')cv2.rectangle(frame,(l,t),(r,b),(0,255,0),5)cv2.putText(frame,str(box[-1]),(l,t-20),cv2.FONT_ITALIC,1,(0,255,0),2)now = time.time()fps_text = 1/(now - fps_time)fps_time = nowcv2.putText(frame,str(round(fps_text,2)),(50,50),cv2.FONT_ITALIC,1,(0,255,0),2)cv2.imshow('demo',frame)if cv2.waitKey(10) & 0xFF == ord('q'):breakcap.release()
cv2.destroyAllWindows()运行正常
二、YOLOV5转换成openvino
1、安装onnx
pip install onnx==1.11.0
2、修改文件
修改export.py 的第121行,修改成
opset_version=103、导出onnx
使用训练好的best.pt文件,把best.pt转成onnx文件
转换命令为:
python export.py --weights ../weights/best.pt --img 640 --batch 14、转成openvino
转换前先安装环境
pip install openvino-dev[onnx]==2021.4.0
pip install openvino==2021.4.0
验证一下,输入mo -h
![]()
接下来转换模型,使用下面命令导出模型
mo --input_model weights/best.onnx --model_name weights/ir_model -s 255 --reverse_input_channels --output Conv_294,Conv_245,Conv_196会生成3个文件, ir_model.xml就是要用的文件。

5、运行
python yolov5_demo.py -i cam -m weights/ir_model.xml -d CPU代码:
import logging
import os
import sys
from argparse import ArgumentParser, SUPPRESS
from math import exp as exp
from time import time,sleep
import numpy as np
import cv2
from openvino.inference_engine import IENetwork, IECorelogging.basicConfig(format="[ %(levelname)s ] %(message)s", level=logging.INFO, stream=sys.stdout)
log = logging.getLogger()def build_argparser():parser = ArgumentParser(add_help=False)args = parser.add_argument_group('Options')args.add_argument('-h', '--help', action='help', default=SUPPRESS, help='Show this help message and exit.')args.add_argument("-m", "--model", help="Required. Path to an .xml file with a trained model.",required=True, type=str)args.add_argument("-i", "--input", help="Required. Path to an image/video file. (Specify 'cam' to work with ""camera)", required=True, type=str)args.add_argument("-l", "--cpu_extension",help="Optional. Required for CPU custom layers. Absolute path to a shared library with ""the kernels implementations.", type=str, default=None)args.add_argument("-d", "--device",help="Optional. Specify the target device to infer on; CPU, GPU, FPGA, HDDL or MYRIAD is"" acceptable. The sample will look for a suitable plugin for device specified. ""Default value is CPU", default="CPU", type=str)args.add_argument("-t", "--prob_threshold", help="Optional. Probability threshold for detections filtering",default=0.5, type=float)args.add_argument("-iout", "--iou_threshold", help="Optional. Intersection over union threshold for overlapping ""detections filtering", default=0.4, type=float)return parserclass YoloParams:# ------------------------------------------- Extracting layer parameters ------------------------------------------# Magic numbers are copied from yolo samplesdef __init__(self, side):self.num = 3 #if 'num' not in param else int(param['num'])self.coords = 4 #if 'coords' not in param else int(param['coords'])self.classes = 80 #if 'classes' not in param else int(param['classes'])self.side = sideself.anchors = [10.0, 13.0, 16.0, 30.0, 33.0, 23.0, 30.0, 61.0, 62.0, 45.0, 59.0, 119.0, 116.0, 90.0, 156.0,198.0,373.0, 326.0] #if 'anchors' not in param else [float(a) for a in param['anchors'].split(',')]def letterbox(img, size=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True):# Resize image to a 32-pixel-multiple rectangle https://github.com/ultralytics/yolov3/issues/232shape = img.shape[:2] # current shape [height, width]w, h = size# Scale ratio (new / old)r = min(h / shape[0], w / shape[1])if not scaleup: # only scale down, do not scale up (for better test mAP)r = min(r, 1.0)# Compute paddingratio = r, r # width, height ratiosnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = w - new_unpad[0], h - new_unpad[1] # wh paddingif auto: # minimum rectangledw, dh = np.mod(dw, 64), np.mod(dh, 64) # wh paddingelif scaleFill: # stretchdw, dh = 0.0, 0.0new_unpad = (w, h)ratio = w / shape[1], h / shape[0] # width, height ratiosdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeimg = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add bordertop2, bottom2, left2, right2 = 0, 0, 0, 0if img.shape[0] != h:top2 = (h - img.shape[0])//2bottom2 = top2img = cv2.copyMakeBorder(img, top2, bottom2, left2, right2, cv2.BORDER_CONSTANT, value=color) # add borderelif img.shape[1] != w:left2 = (w - img.shape[1])//2right2 = left2img = cv2.copyMakeBorder(img, top2, bottom2, left2, right2, cv2.BORDER_CONSTANT, value=color) # add borderreturn imgdef scale_bbox(x, y, height, width, class_id, confidence, im_h, im_w, resized_im_h=640, resized_im_w=640):gain = min(resized_im_w / im_w, resized_im_h / im_h) # gain = old / newpad = (resized_im_w - im_w * gain) / 2, (resized_im_h - im_h * gain) / 2 # wh paddingx = int((x - pad[0])/gain)y = int((y - pad[1])/gain)w = int(width/gain)h = int(height/gain)xmin = max(0, int(x - w / 2))ymin = max(0, int(y - h / 2))xmax = min(im_w, int(xmin + w))ymax = min(im_h, int(ymin + h))# Method item() used here to convert NumPy types to native types for compatibility with functions, which don't# support Numpy types (e.g., cv2.rectangle doesn't support int64 in color parameter)return dict(xmin=xmin, xmax=xmax, ymin=ymin, ymax=ymax, class_id=class_id.item(), confidence=confidence.item())def entry_index(side, coord, classes, location, entry):side_power_2 = side ** 2n = location // side_power_2loc = location % side_power_2return int(side_power_2 * (n * (coord + classes + 1) + entry) + loc)def parse_yolo_region(blob, resized_image_shape, original_im_shape, params, threshold):# ------------------------------------------ Validating output parameters ------------------------------------------ out_blob_n, out_blob_c, out_blob_h, out_blob_w = blob.shapepredictions = 1.0/(1.0+np.exp(-blob)) # ------------------------------------------ Extracting layer parameters -------------------------------------------orig_im_h, orig_im_w = original_im_shaperesized_image_h, resized_image_w = resized_image_shapeobjects = list()side_square = params.side * params.side# ------------------------------------------- Parsing YOLO Region output -------------------------------------------bbox_size = int(out_blob_c/params.num) #4+1+num_classesindex=0for row, col, n in np.ndindex(params.side, params.side, params.num):bbox = predictions[0, n*bbox_size:(n+1)*bbox_size, row, col]x, y, width, height, object_probability = bbox[:5]class_probabilities = bbox[5:]if object_probability < threshold:continuex = (2*x - 0.5 + col)*(resized_image_w/out_blob_w)y = (2*y - 0.5 + row)*(resized_image_h/out_blob_h)if int(resized_image_w/out_blob_w) == 8 & int(resized_image_h/out_blob_h) == 8: #80x80, idx = 0elif int(resized_image_w/out_blob_w) == 16 & int(resized_image_h/out_blob_h) == 16: #40x40idx = 1elif int(resized_image_w/out_blob_w) == 32 & int(resized_image_h/out_blob_h) == 32: # 20x20idx = 2width = (2*width)**2* params.anchors[idx * 6 + 2 * n]height = (2*height)**2 * params.anchors[idx * 6 + 2 * n + 1]class_id = np.argmax(class_probabilities)confidence = object_probabilityobjects.append(scale_bbox(x=x, y=y, height=height, width=width, class_id=class_id, confidence=confidence,im_h=orig_im_h, im_w=orig_im_w, resized_im_h=resized_image_h, resized_im_w=resized_image_w))if index >30:breakindex+=1return objectsdef intersection_over_union(box_1, box_2):width_of_overlap_area = min(box_1['xmax'], box_2['xmax']) - max(box_1['xmin'], box_2['xmin'])height_of_overlap_area = min(box_1['ymax'], box_2['ymax']) - max(box_1['ymin'], box_2['ymin'])if width_of_overlap_area < 0 or height_of_overlap_area < 0:area_of_overlap = 0else:area_of_overlap = width_of_overlap_area * height_of_overlap_areabox_1_area = (box_1['ymax'] - box_1['ymin']) * (box_1['xmax'] - box_1['xmin'])box_2_area = (box_2['ymax'] - box_2['ymin']) * (box_2['xmax'] - box_2['xmin'])area_of_union = box_1_area + box_2_area - area_of_overlapif area_of_union == 0:return 0return area_of_overlap / area_of_uniondef main():args = build_argparser().parse_args()# ------------- 1. Plugin initialization for specified device and load extensions library if specified -------------ie = IECore()if args.cpu_extension and 'CPU' in args.device:ie.add_extension(args.cpu_extension, "CPU")# -------------------- 2. Reading the IR generated by the Model Optimizer (.xml and .bin files) --------------------model = args.modelnet = ie.read_network(model=model)# ---------------------------------------------- 4. Preparing inputs -----------------------------------------------input_blob = next(iter(net.input_info))# Defaulf batch_size is 1net.batch_size = 1# Read and pre-process input imagesn, c, h, w = net.input_info[input_blob].input_data.shape# labels_map = [x.strip() for x in f]labels_map = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light','fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow','elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee','skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard','tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple','sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch','potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone','microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear','hair drier', 'toothbrush']input_stream = 0 if args.input == "cam" else args.inputis_async_mode = Truecap = cv2.VideoCapture(input_stream)number_input_frames = int(cap.get(cv2.CAP_PROP_FRAME_COUNT))number_input_frames = 1 if number_input_frames != -1 and number_input_frames < 0 else number_input_frameswait_key_code = 1# Number of frames in picture is 1 and this will be read in cycle. Sync mode is default value for this caseif number_input_frames != 1:ret, frame = cap.read()else:is_async_mode = Falsewait_key_code = 0# ----------------------------------------- 5. Loading model to the plugin -----------------------------------------exec_net = ie.load_network(network=net, num_requests=2, device_name=args.device)cur_request_id = 0next_request_id = 1render_time = 0parsing_time = 0# ----------------------------------------------- 6. Doing inference -----------------------------------------------initial_w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))initial_h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))origin_im_size = (initial_h,initial_w)while cap.isOpened():# Here is the first asynchronous point: in the Async mode, we capture frame to populate the NEXT infer request# in the regular mode, we capture frame to the CURRENT infer requestif is_async_mode:ret, next_frame = cap.read()else:ret, frame = cap.read()if not ret:breakif is_async_mode:request_id = next_request_idin_frame = letterbox(frame, (w, h))else:request_id = cur_request_idin_frame = letterbox(frame, (w, h))in_frame0 = in_frame# resize input_frame to network sizein_frame = in_frame.transpose((2, 0, 1)) # Change data layout from HWC to CHWin_frame = in_frame.reshape((n, c, h, w))# Start inferencestart_time = time()exec_net.start_async(request_id=request_id, inputs={input_blob: in_frame})# Collecting object detection resultsobjects = list()if exec_net.requests[cur_request_id].wait(-1) == 0:output = exec_net.requests[cur_request_id].output_blobsstart_time = time()for layer_name, out_blob in output.items():layer_params = YoloParams(side=out_blob.buffer.shape[2])objects += parse_yolo_region(out_blob.buffer, in_frame.shape[2:],frame.shape[:-1], layer_params,args.prob_threshold)parsing_time = time() - start_time# Filtering overlapping boxes with respect to the --iou_threshold CLI parameterobjects = sorted(objects, key=lambda obj : obj['confidence'], reverse=True)for i in range(len(objects)):if objects[i]['confidence'] == 0:continuefor j in range(i + 1, len(objects)):if intersection_over_union(objects[i], objects[j]) > args.iou_threshold:objects[j]['confidence'] = 0# Drawing objects with respect to the --prob_threshold CLI parameterobjects = [obj for obj in objects if obj['confidence'] >= args.prob_threshold]for obj in objects:# Validation bbox of detected objectif obj['xmax'] > origin_im_size[1] or obj['ymax'] > origin_im_size[0] or obj['xmin'] < 0 or obj['ymin'] < 0:continuecolor = (0,255,0)det_label = labels_map[obj['class_id']] if labels_map and len(labels_map) >= obj['class_id'] else \str(obj['class_id'])cv2.rectangle(frame, (obj['xmin'], obj['ymin']), (obj['xmax'], obj['ymax']), color, 2)cv2.putText(frame,"#" + det_label + ' ' + str(round(obj['confidence'] * 100, 1)) + ' %',(obj['xmin'], obj['ymin'] - 7), cv2.FONT_ITALIC, 1, color, 2)# Draw performance stats over frameasync_mode_message = "Async mode: ON"if is_async_mode else "Async mode: OFF"cv2.putText(frame, async_mode_message, (10, int(origin_im_size[0] - 20)), cv2.FONT_ITALIC, 1,(10, 10, 200), 2)fps_time = time() - start_timeif fps_time !=0:fps = 1 / fps_timecv2.putText(frame, 'fps:'+str(round(fps,2)), (50, 50), cv2.FONT_ITALIC, 1, (0, 255, 0), 2)cv2.imshow("DetectionResults", frame)if is_async_mode:cur_request_id, next_request_id = next_request_id, cur_request_idframe = next_framekey = cv2.waitKey(wait_key_code)# ESC keyif key == 27:break# Tab keyif key == 9:exec_net.requests[cur_request_id].wait()is_async_mode = not is_async_modelog.info("Switched to {} mode".format("async" if is_async_mode else "sync"))cv2.destroyAllWindows()if __name__ == '__main__':sys.exit(main() or 0)
三、总结
通过openvino加速,CPU没有GPU下,从原本的20帧左右提升到50多帧,效果还可以,就 是用自己的模型,训练出来的效果不怎么好。
使用树莓派等嵌入板子使用openvino效果还可以。
如有侵权,或需要完整代码,请及时联系博主。
相关文章:
AI项目六:基于YOLOV5的CPU版本部署openvino
若该文为原创文章,转载请注明原文出处。 一、CPU版本DEMO测试 1、创建一个新的虚拟环境 conda create -n course_torch_openvino python3.8 2、激活环境 conda activate course_torch_openvino 3、安装pytorch cpu版本 pip install torch torchvision torchau…...

记录YDLidar驱动包交叉编译时出现的一点问题
由于一不小心把交叉编译的系统根目录破坏了,所以一股脑将交叉编译系统根目录全删了重新安装,安装后,交叉编译发现ydlidar的ros包驱动出现了库无法链接的错误(刚刚还是好好的),但是又想不起来之前是怎么解决的了,所以还…...
嵌入式学习笔记(32)S5PV210的向量中断控制器
6.6.1异常处理的2个阶段 可以将异常处理分为2个阶段来理解。第一个阶段是异常向量表跳转;第二个阶段是进入了真正的异常处理程序irq_handler之后的部分。 6.6.2回顾:中断处理的第一个阶段(异常向量表跳转阶段)处理 (…...

linux下安装qt、qt触摸屏校准tslib
linux下安装qt 在 Linux 系统下安装 Qt,可以通过以下步骤进行操作:1. 下载 Qt 安装包:首先,你需要从 Qt 官方网站(https://www.qt.io/)下载适用于 Linux 的 Qt 安装包。选择与你的系统和需求相匹配的版本&…...
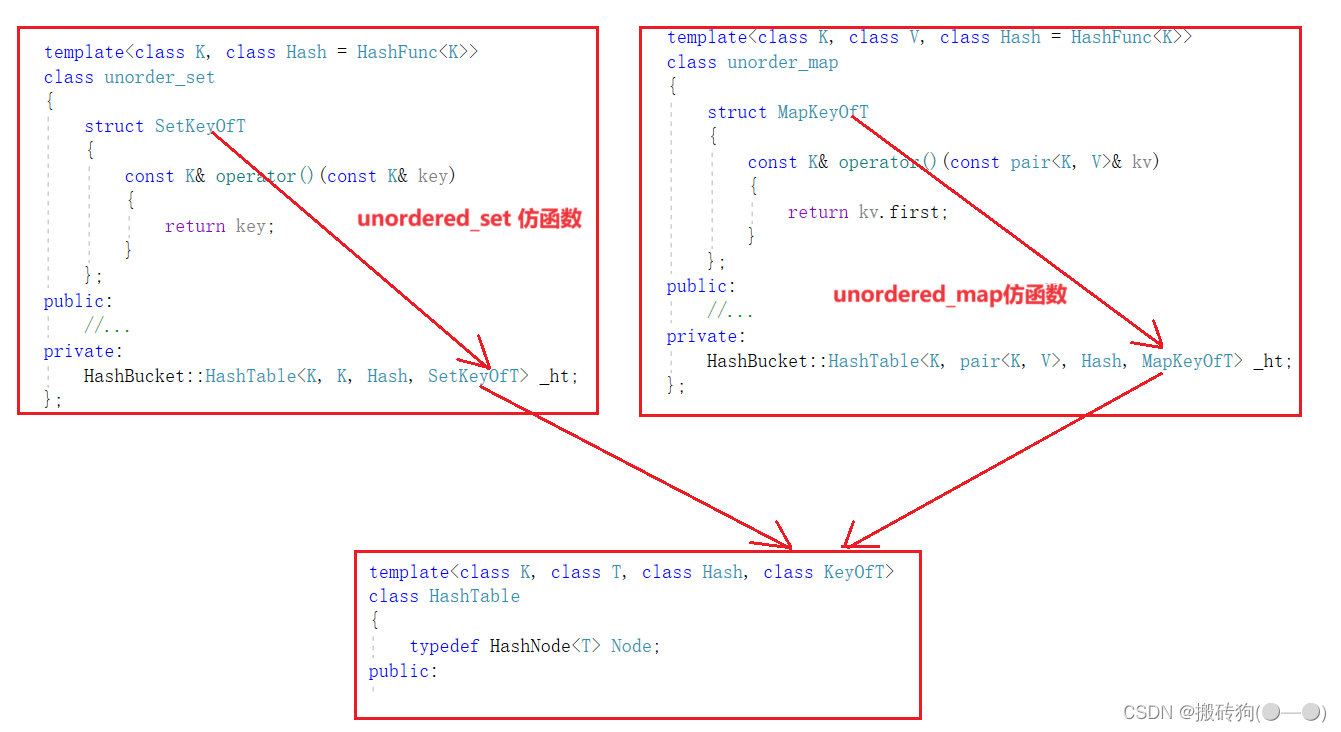
C++之unordered_map,unordered_set模拟实现
unordered_map,unordered_set模拟实现 哈希表源代码哈希表模板参数的控制仿函数增加正向迭代器实现*运算符重载->运算符重载运算符重载! 和 运算符重载begin()与end()实现 unordered_set实现unordered_map实现map/set 与 unordered_map/unordered_set对比哈希表…...

React Router,常用API有哪些?
react-router React Router是一个用于构建单页面应用程序(SPA)的库,它是用于管理React应用中页面导航和路由的工具。SPA是一种Web应用程序类型,它在加载初始页面后,通过JavaScript来动态加载并更新页面内容࿰…...

JVM类加载和双亲委派机制
当我们用java命令运行某个类的main函数启动程序时,首先需要通过类加载器把类加载到JVM,本文主要说明类加载机制和其具体实现双亲委派模式。 一、类加载机制 类加载过程: 类加载的过程是将类的字节码加载到内存中的过程,主要包括…...

P-MVSNet ICCV-2019 学习笔记总结 译文 深度学习三维重建
文章目录 5 P-MVSNet ICCV-20195.0 主要特点5.1 文章概述5.2 研究方法5.2.1 特征提取5.2.2 学习局域匹配置信5.2.3 深度图预测5.2.4 Loss方程MVSNet系列最新顶刊 对比总结5 P-MVSNet ICCV-2019 深度学习三维重建 P-MVSNet-ICCV-2019(原文、译文、批注) 下载 5.0 主要特点 …...

vueshowpdf 移动端pdf文件预览
1、安装 npm install vueshowpdf -S2、参数 属性说明类型默认值v-model是否显示pdf--pdfurlpdf的文件地址String- scale 默认放大倍数 Number1.2 minscale 最小放大倍数 Number0.8 maxscale 最大放大倍数 Number2 3、事件 名称说明回调参数closepdf pdf关闭事件-pdferr文…...

C#根据excel文件中的表头创建数据库表
C#根据excel文件中的表头创建数据库表 private void button1_Click(object sender, EventArgs e){string tableName tableNameTextBox.Text;string connectionString "";using (OpenFileDialog openFileDialog new OpenFileDialog()){openFileDialog.Filter &quo…...
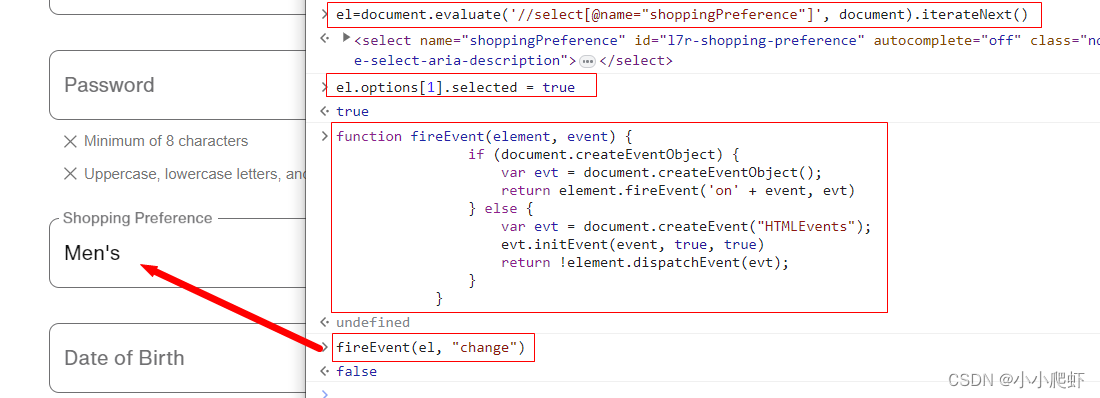
js通过xpath定位元素并且操作元素以下拉框select为例
js也可以使用xpath定位元素,现在实例讲解。 页面上有一个下拉框,里面内容有三个,用F12看一下 一、使用xpath定位这个下拉框select eldocument.evaluate(//select[name"shoppingPreference"], document).iterateNext()二、为下拉框…...

数据类型
目录 1.数值类型 整数类型 int 小数类型 double 2.字符类型 固定长度字符串 char 可变长度字符串 varchar 3.日期时间类型 日期类型:date 日期时间类型:datetime MySQL从小白到总裁完整教程目录:https://blog.csdn.net/weixin_67859959/article…...

vue 模板应用
一,模板应用也就是对DOM的操作 二,如何使用 通过标签里面添加ref 和vue中使用 this.$refs.ref的名字.操作 进行使用 <template><h3>模板引用</h3><div ref"cont" class"cont">{{ content }}</div>&…...
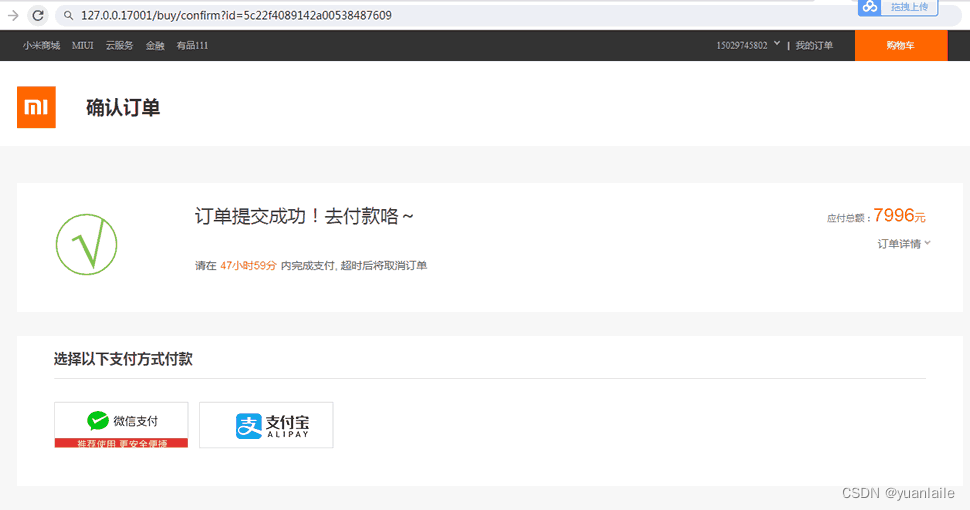
Golang教程与Gin教程合集,入门到实战
GolangGin框架GormRbac微服务仿小米商城项目实战视频教程Docker Swarm K8s云原生分布式部署 介绍: Go即Golang,是Google公司2009年11月正式对外公开的一门编程语言,它不仅拥有静态编译语言的安全和高性能,而 且又达到了动态语言开…...

国家网络安全周 | 天空卫士荣获“2023网络安全优秀创新成果大赛优胜奖”
9月11日上午,四川省2023年国家网络安全宣传周在泸州开幕。在开幕式上,为2023年网络安全优秀创新成果大赛——成都分站赛暨四川省“熊猫杯”网络安全优秀作品大赛中获奖企业颁奖,天空卫士银行数据安全方案获得优秀解决方案奖。 本次比赛由四川…...
)
Swift学习笔记一(Array篇)
目录 0 绪论 1 数组的创建和初始化 2.数组遍历 2.1通过键值对遍历 2.2 通过forEach遍历 2.3 通过for in遍历 2.3.1 for in 搭配 enumerated 2.3.2 for in的另一种形式 2.3.2 for in 搭配 indices 2.4 通过Iterator遍历器遍历 3 数组的操作 3.1 contains 判断数组包含…...

C++项目实战——基于多设计模式下的同步异步日志系统-②-前置知识补充-不定参函数
文章目录 专栏导读不定参函数C风格不定参函数不定参宏函数 专栏导读 🌸作者简介:花想云 ,在读本科生一枚,C/C领域新星创作者,新星计划导师,阿里云专家博主,CSDN内容合伙人…致力于 C/C、Linux 学…...

C++使用Boost库加入UDP组播时程序崩溃
程序崩溃情况 本程序运行在Oracle VM VirtualBox虚拟的Ubuntu20.04上 terminate called after throwing an instance of ‘boost::wrapexceptboost::system::system_error’ what(): set_option: No such device 已放弃 (核心已转储) ** C使用Boost库加入组播的代码 #inclu…...

华为HCIA(四)
链路聚合可以负载分担,增加带宽,提高可靠性 Eth-trunk的传输速率和成员端口数量喝带宽有关 路由器分割广播域,交换机分割冲突域 指定端口:DP;根端口:RP;阻塞端口:AP 如果目的MAC不在交换机MAC中&…...
Qt --- Day01
效果图: 头像的圆形未实现 单击登陆,触发信号与槽 enter_widget.h #ifndef ENTER_H #define ENTER_H#include <QDialog> #include<QLabel> #include<QTimer> class enter_widget : public QDialog {Q_OBJECT public:explicit enter_…...

如何通过Python快速接入Taotoken并调用多模型API完成文本生成任务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何通过Python快速接入Taotoken并调用多模型API完成文本生成任务 1. 准备工作:获取API Key与模型ID 在开始编写代码之…...

R3nzSkin英雄联盟皮肤修改器完整教程:免费体验全皮肤的终极指南
R3nzSkin英雄联盟皮肤修改器完整教程:免费体验全皮肤的终极指南 【免费下载链接】R3nzSkin Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3n/R3nzSkin R3nzSkin是一款专为《英雄联盟》玩家设计的开源皮肤修改工具&a…...

CentOS 8系统下EMQX 4.3.8安装避坑实录:解决crypto和libncurses依赖报错
CentOS 8系统下EMQX 4.3.8深度部署指南:从依赖解析到高可用架构 在物联网和边缘计算领域,MQTT协议凭借其轻量级和高效性已成为设备通信的事实标准。而EMQX作为基于Erlang/OTP平台开发的开源MQTT消息服务器,其单节点支持200万连接的能力使其成…...

从2013年光网络市场增长看100G与分组化技术演进
1. 从一篇旧闻说起:2013年光网络市场的“中国引擎”最近在整理一些老资料,翻到了EE Times在2013年9月的一篇市场分析报道。标题很直白,叫“中国驱动基础设施增长”。报道的核心数据是,光分组平台市场(包含光分组传输、…...

3个步骤搭建Sunshine游戏串流服务器:从零到一的完整指南
3个步骤搭建Sunshine游戏串流服务器:从零到一的完整指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否曾经梦想过在客厅的电视上玩书房电脑里的3A大作…...

AI开发者实战指南:从工具全景到本地知识库搭建
1. 从Awesome List到实战地图:一份AI开发者工具全景解析如果你是一名AI开发者、研究者,或者只是对构建AI应用充满好奇的技术爱好者,面对浩如烟海的工具、框架和平台,最头疼的恐怕就是“我该从哪里开始?”这个问题。网上…...
)
保姆级教程:用PyTorch复现HRNet人体姿态估计(附完整代码与COCO数据集配置)
保姆级教程:用PyTorch复现HRNet人体姿态估计(附完整代码与COCO数据集配置) HRNet(High-Resolution Network)作为当前人体姿态估计领域的标杆模型,以其独特的并行多分辨率子网络结构,在保持高空间…...

争分夺秒与步步为营:Infoseek舆情系统如何重构危机响应的时间哲学
“黄金4小时”甚至“黄金1小时”,是公关行业奉行的铁律。然而,为了追求速度而仓促发出的声明,常常因为事实核查不清、逻辑存在漏洞或情感表达不当,引发更猛烈的“二次翻车”。这种“翻车”对企业公信力的伤害,往往比原…...

1.7.3 掌握Scala函数 - 神奇占位符
本次Scala函数实战主要聚焦于“神奇占位符”下划线(_)的灵活运用,通过三个递进的案例深入理解其简化代码的核心作用。 演示过滤列表:利用 filter 方法,对比了常规匿名函数与使用占位符的写法,直观展示了如何…...

XSP25全协议 100W PD快充诱骗芯片_串口读电压电流信息
在Type-C快充技术普及的今天,快充诱骗协议芯片成为小家电、智能硬件、锂电设备等产品实现高效取电的核心器件。XSP25作为汇铭达推出的Type‑C受电端(Sink)多功能快充取电芯片,以全协议兼容、100W大功率输出、串口智能通信、极简外…...