Pytorch intermediate(二) ResNet
实现了残差网络,残差网络结构。代码比之前复杂很多
conv3x3:将输入数据进行一次卷积,将数据转换成为,残差块需要的shape大小
ResidualBlock:残差块,也是所谓的恒等块。为什么被称为恒等块,大概可以理解为经过几层卷积过后大小形状不变,并且能和输入相加;如果形状变了,那么输入也会利用一次卷积得到和残差块输出大小相同的数据块。
可以看到在残差块中有一个判断,就是判断输入数据是否被向下采样,也就是形状是否变化,如果变化就进行上述处理。
ResNet:构建一个完整的残差网络。传入参数是一个残差块的结构,还有每一层中残差块的个数元组。重点看以下其中的层次结构。
conv3x3:将输入图片变成16通道
输入通道数:16
layer1:输入通道:16,输出通道:16,padding = 0,stride = 0
layer2:输入通道:16,输出通道:32,padding = 0, stride = 2。由于输入不等于输出通道数,增加了一层卷积层,并且带有对应的stride。
layer3:输入通道:32,输出通道:64,其余同上
pooling:均值池化
fc:全连接
update_lr:在每个epoch之后实现对learning_rate的下降
同样由于加入了batchnorm层,测试时需要使用model.eval()
网络结构:
ResNet((conv): Conv2d(3, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(layer1): Sequential((0): ResidualBlock((conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(1): ResidualBlock((conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer2): Sequential((0): ResidualBlock((conv1): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): ResidualBlock((conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer3): Sequential((0): ResidualBlock((conv1): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): ResidualBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(avg_pool): AvgPool2d(kernel_size=8, stride=8, padding=0)(fc): Linear(in_features=64, out_features=10, bias=True)
)
代码如下 :
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms# Device configuration
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')# Hyper-parameters
num_epochs = 80
learning_rate = 0.001# Image preprocessing modules
transform = transforms.Compose([transforms.Pad(4),transforms.RandomHorizontalFlip(),transforms.RandomCrop(32),transforms.ToTensor()])# CIFAR-10 dataset
train_dataset = torchvision.datasets.CIFAR10(root='../../data/',train=True, transform=transform,download=True)test_dataset = torchvision.datasets.CIFAR10(root='../../data/',train=False, transform=transforms.ToTensor())# Data loader
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,batch_size=100, shuffle=True)test_loader = torch.utils.data.DataLoader(dataset=test_dataset,batch_size=100, shuffle=False)# 3x3 convolution
def conv3x3(in_channels, out_channels, stride=1):return nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)# Residual block
class ResidualBlock(nn.Module):def __init__(self, in_channels, out_channels, stride=1, downsample=None):super(ResidualBlock, self).__init__()self.conv1 = conv3x3(in_channels, out_channels, stride)self.bn1 = nn.BatchNorm2d(out_channels)self.relu = nn.ReLU(inplace=True)self.conv2 = conv3x3(out_channels, out_channels)self.bn2 = nn.BatchNorm2d(out_channels)self.downsample = downsampledef forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)if self.downsample:residual = self.downsample(x)out += residualout = self.relu(out)return out# ResNet
class ResNet(nn.Module):def __init__(self, block, layers, num_classes=10):super(ResNet, self).__init__()self.in_channels = 16self.conv = conv3x3(3, 16)self.bn = nn.BatchNorm2d(16)self.relu = nn.ReLU(inplace=True)self.layer1 = self.make_layer(block, 16, layers[0])self.layer2 = self.make_layer(block, 32, layers[1], 2)self.layer3 = self.make_layer(block, 64, layers[2], 2)self.avg_pool = nn.AvgPool2d(8)self.fc = nn.Linear(64, num_classes)def make_layer(self, block, out_channels, blocks, stride=1):downsample = Noneif (stride != 1) or (self.in_channels != out_channels):downsample = nn.Sequential(conv3x3(self.in_channels, out_channels, stride=stride),nn.BatchNorm2d(out_channels))layers = []layers.append(block(self.in_channels, out_channels, stride, downsample))self.in_channels = out_channelsfor i in range(1, blocks):layers.append(block(out_channels, out_channels))return nn.Sequential(*layers)def forward(self, x):out = self.conv(x)out = self.bn(out)out = self.relu(out)out = self.layer1(out)out = self.layer2(out)out = self.layer3(out)out = self.avg_pool(out)out = out.view(out.size(0), -1)out = self.fc(out)return outmodel = ResNet(ResidualBlock, [2, 2, 2]).to(device)# Loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)# For updating learning rate
def update_lr(optimizer, lr): for param_group in optimizer.param_groups:param_group['lr'] = lr# Train the model
total_step = len(train_loader)
curr_lr = learning_rate
for epoch in range(num_epochs):for i, (images, labels) in enumerate(train_loader):images = images.to(device)labels = labels.to(device)# Forward passoutputs = model(images)loss = criterion(outputs, labels)# Backward and optimizeoptimizer.zero_grad()loss.backward()optimizer.step()if (i+1) % 100 == 0:print ("Epoch [{}/{}], Step [{}/{}] Loss: {:.4f}".format(epoch+1, num_epochs, i+1, total_step, loss.item()))# Decay learning rateif (epoch+1) % 20 == 0:curr_lr /= 3update_lr(optimizer, curr_lr)# Test the model
model.eval()
with torch.no_grad():correct = 0total = 0for images, labels in test_loader:images = images.to(device)labels = labels.to(device)outputs = model(images)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()print('Accuracy of the model on the test images: {} %'.format(100 * correct / total))# Save the model checkpoint
torch.save(model.state_dict(), 'resnet.ckpt')
相关文章:
 ResNet)
Pytorch intermediate(二) ResNet
实现了残差网络,残差网络结构。代码比之前复杂很多 conv3x3:将输入数据进行一次卷积,将数据转换成为,残差块需要的shape大小 ResidualBlock:残差块,也是所谓的恒等块。为什么被称为恒等块,大概…...

【2023集创赛】加速科技杯作品:高光响应的二硫化铼光电探测器
本文为2023年第七届全国大学生集成电路创新创业大赛(“集创赛”)加速科技杯西北赛区二等奖作品分享,参加极术社区的【有奖征集】分享你的2023集创赛作品,秀出作品风采,分享2023集创赛作品扩大影响力,更有丰…...
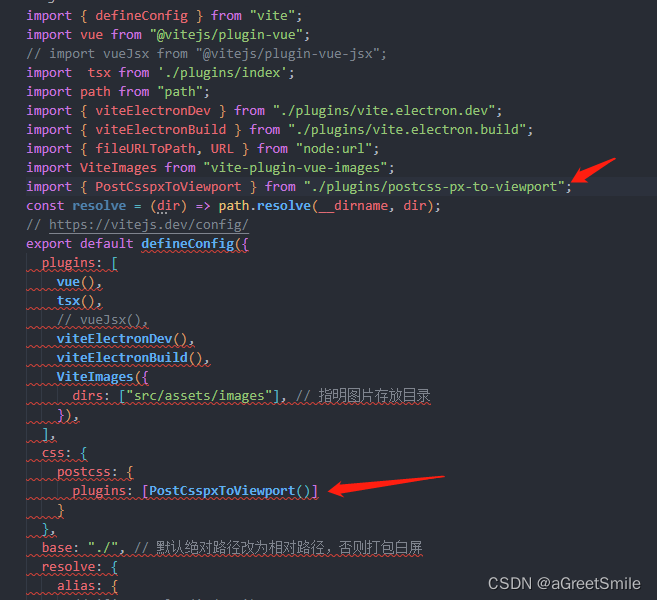
编写postcss插件,全局css文件px转vw
跟目录下创建plugins文件夹,创建postcss-px-to-viewport.ts文件 文件内代码: // postcss 的插件 vite内置了postCss插件 无需安装 import { Plugin } from postcss;interface Options {viewportWidth: number }const Options {viewportWidth: 375, // …...

精品SpringCloud的B2C模式在线学习网微服务分布式
《[含文档PPT源码等]精品基于SpringCloud实现的B2C模式在线学习网站-微服务-分布式》该项目含有源码、文档、PPT、配套开发软件、软件安装教程、项目发布教程等 软件开发环境及开发工具: 开发语言:Java 框架:springcloud JDK版本…...
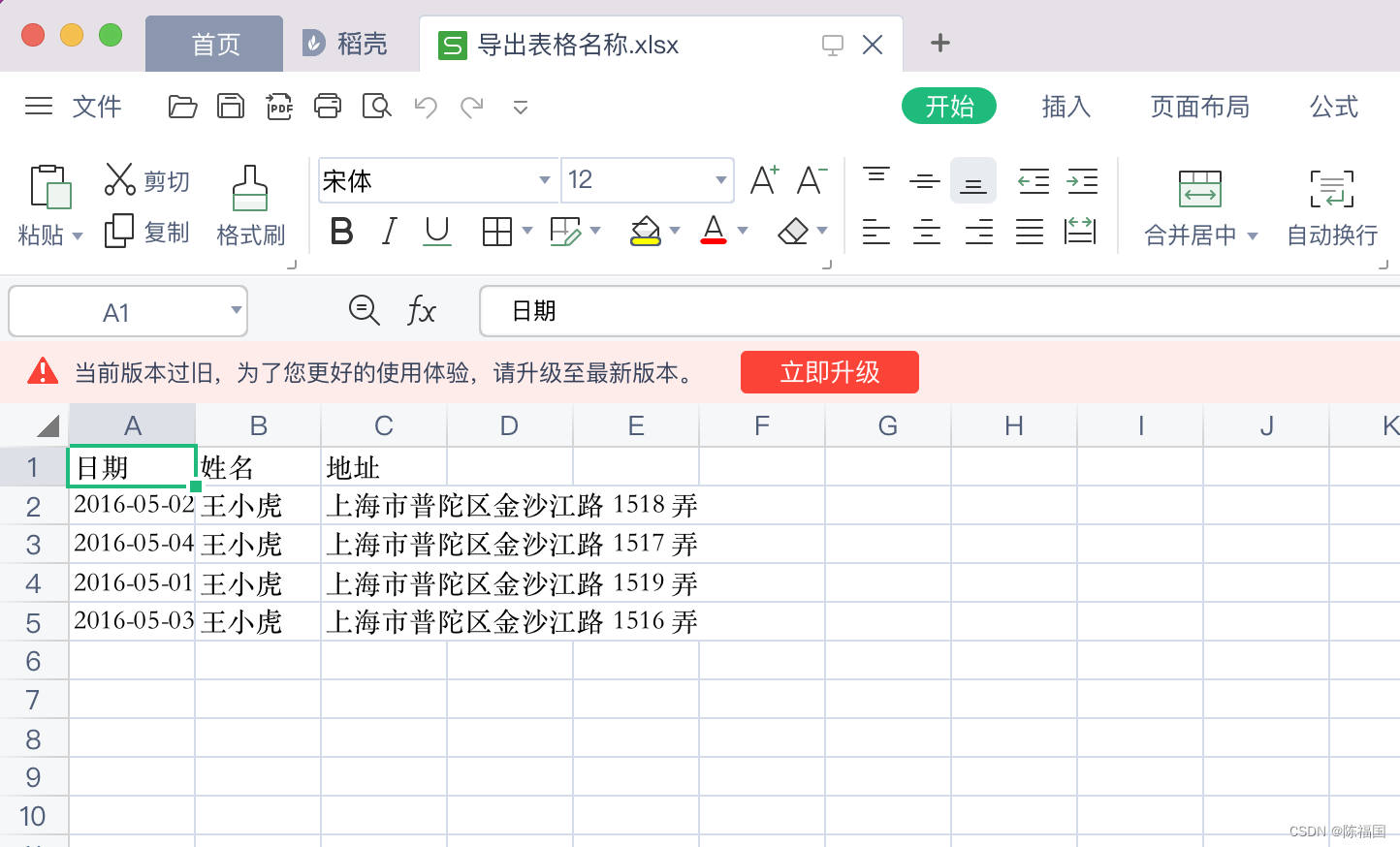
解决vue项目导出当前页Table为Excel
解决vue项目中导出当前页表格为Excel表格的方案 用到的技术: Vue2Element-uifile-saverxlsx 1、创建vue项目,安装element-ui 2、创建一个组件,组件内放入表格,和导出按钮 <template><div><!-- 导出的按钮 -->…...
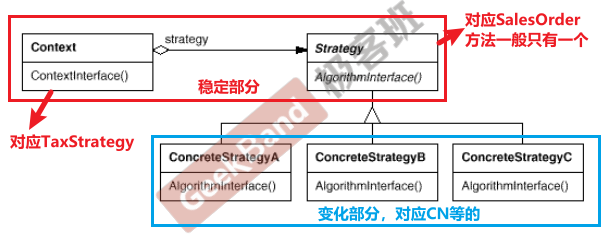
C++设计模式_04_Strategy 策略模式
接上篇,本篇将会介绍C设计模式中的Strategy 策略模式,和上篇模板方法Template Method一样,仍属于“组件协作”模式,它与Template Method有着异曲同工之妙。 文章目录 1. 动机( Motivation)2. 代码演示Stra…...
)
目标检测YOLO实战应用案例100讲-基于YOLOv3多模块融合的遥感目标检测(中)
目录 2.2.3 YOLO 2.3 目标检测算法分析 2.3.1 目标检测结果评价指标...

element 表格fixed列高度无法100%
下文提到的滚动条皆为横向滚动条错误方法(旧方法,点击查看旧博客) 一下代码虽然能解决fixed列高度无法100%问题,但是会出现fixed列下面的滚动条无法被点击的问题(被fixed列遮挡),所以该方法并不…...
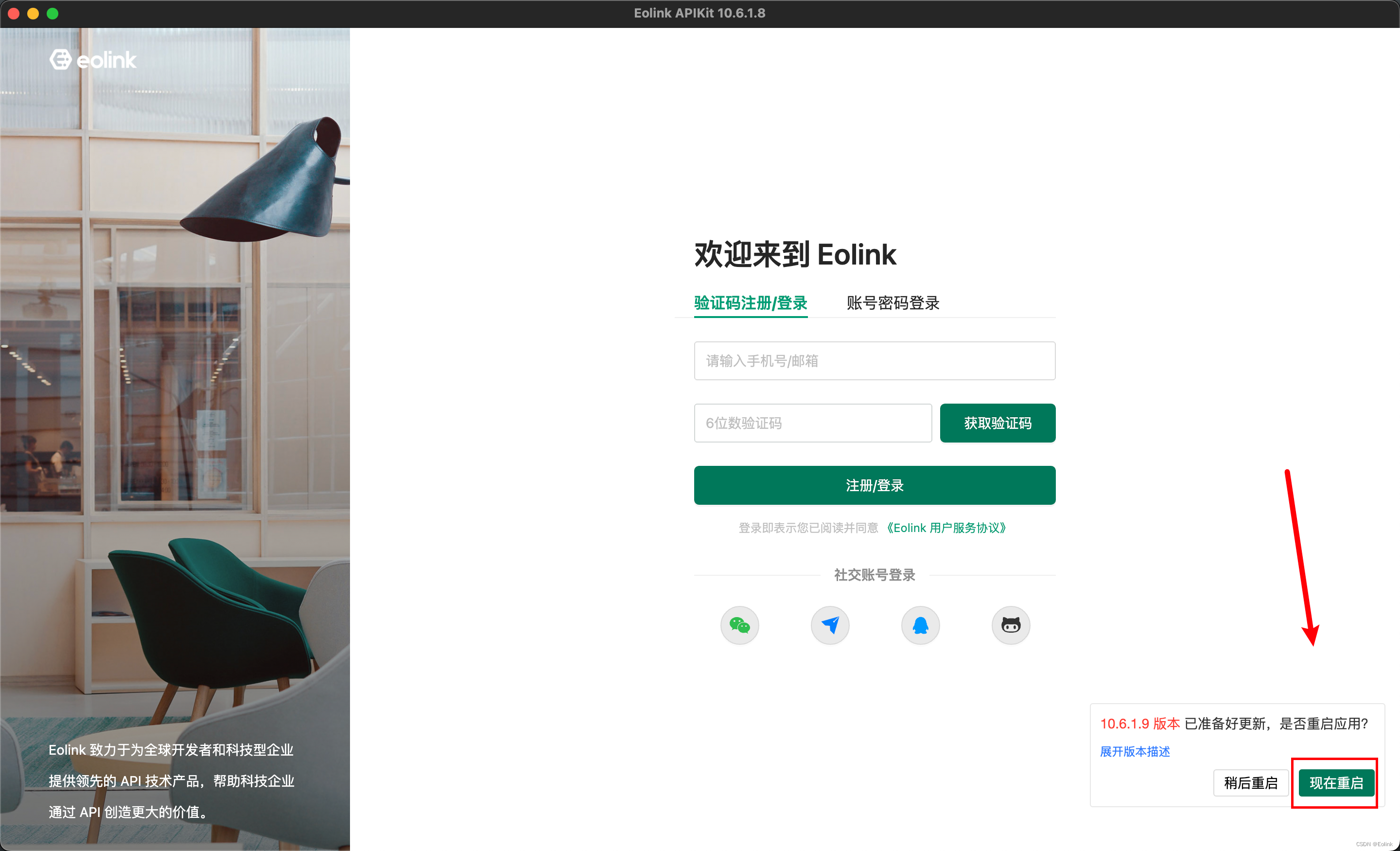
【接口自动化测试】Eolink Apilkit 安装部署,支持 Windows、Mac、Linux 等系统
Eolink Apikit 有三种客户端,可以依据自己的情况选择。三种客户端的数据是共用的,因此可以随时切换不同的客户端。 我们推荐使用新推出的 Apikit PC 客户端,PC 端拥有线上产品所有的功能,并且针对本地测试、自动化测试以及使用体…...
解决sass问题:npm ERR! node-sass@9.0.0 postinstall: `node scripts/build.js`
目录 一、遇到问题 解决办法 二、 再次遇到问题 解决办法 题外话 一、遇到问题 1.运行这个项目的适合,遇到了没有sass的问题 解决办法 然后就用命令下载sass npm install node-sass 二、 再次遇到问题 2.下载sass的时候又发现了一个这样的问题 npm ER…...

Python技巧---tqdm库的使用
文章目录 一、tqdm基本知识二、在pytorch中使用tqdm 提示:以下是本篇文章正文内容,下面案例可供参考 一、tqdm基本知识 “tqdm” 是一个 Python 库,用于在命令行界面中创建进度条。 基本使用如下: from tqdm import tqdm impor…...
linux-线程条件变量(cond)
概述 与互斥锁不同,条件变量是用来等待而不是用来上锁的。条件变量用来自动阻塞一个线程,直到某特殊情况发生为止。通常条件变量和互斥锁同时使用 。 条件变量使我们可以睡眠等待某种条件出现。条件变量是利用线程间共享的全局变量进行同步的一种机制&a…...

面试算法6:排序数组中的两个数字之和
题目 输入一个递增排序的数组和一个值k,请问如何在数组中找出两个和为k的数字并返回它们的下标?假设数组中存在且只存在一对符合条件的数字,同时一个数字不能使用两次。例如,输入数组[1,2,4,6&…...

【智能家居-大模型】构建未来,聆思大模型智能家居交互解决方案正式发布
LISTENAI 近日,国内11家大模型陆续通过《生成式人工智能服务管理暂行办法》备案,多家大模型产品已正式开放,激发了新一轮大模型热潮。大模型在自然语言理解方面的巨大突破,实现了认知智能的技术跃迁,带来了时代的智慧…...
通讯网关软件002——利用CommGate X2HTTP-U实现HTTP访问OPC UA Server
本文介绍利用CommGate X2HTTP-U实现HTTP访问OPC UA Server。CommGate X2HTTP是宁波科安网信开发的网关软件,软件可以登录到网信智汇(wangxinzhihui.com)下载。 【案例】如下图所示,实现上位机通过HTTP来获取OPC UA Server的数据。 【解决方案】设置网关机…...

模拟经营类游戏是怎么开发的?
模拟经营类游戏开发是一个充满挑战但也充满乐趣的领域。下面是一些步骤和关键考虑因素,可以帮助您开始开发自己的模拟经营游戏: 明确游戏概念: 确定游戏开发的主题和类型,例如城市建设、农场经营、餐厅经营等。 制定一个引人入胜…...
基于JAVA+SSM+微信小程序+MySql的图书捐赠管理系统设计与实现
✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取项目下载方式🍅 一、项目背景介绍: 在当今社会࿰…...

软件设计模式系列之六——单例模式
1 模式的定义 单例模式(Singleton Pattern)是一种常见的创建型设计模式,其主要目的是确保一个类只有一个实例,并提供一个全局访问点来获取该实例。这意味着无论何时何地,只要需要该类的实例,都会返回同一个…...

verdi dump状态机的波形时直接显示状态名
前段时间看到别人用verdi看状态机的波形时,可以显示定义的状态参数,觉得很有意思,特地学习了一下 通常拉出状态机信号的波形是下面这样的 这种信号,我们要想知道每个数值代表的状态,还需要跟定义的parameter比对 像这…...

代码随想录算法训练营19期第53天
1143.最长公共子序列 视频讲解:动态规划子序列问题经典题目 | LeetCode:1143.最长公共子序列_哔哩哔哩_bilibili 代码随想录 初步思路:动态规划。 总结: dp[i][j] :长度为[0, i - 1]的字符串A与长度为[0, j - 1]…...

ClickHouse性能优化:OLAP数据库实战,让查询飞起来
**作者:洛水石** | **更新日期:2026-05-11** | **标签:ClickHouse | OLAP | 数据库优化 | 大数据**前言上个月,运营同学找我抱怨:每天凌晨的报表查询要等5分钟才能出来,数据量大的时候直接超时。作为DBA&am…...

DeFi预测市场套利机器人:延迟套利与结构性对冲策略详解
1. 项目概述:在2.7秒的缝隙中寻找确定性如果你在DeFi世界里寻找一种“低风险、高确定性”的套利机会,那么Polymarket这类预测市场可能是一个被低估的宝藏。这个项目,genoshide/polymarket-arbitrage-trading-bot,本质上是一个高度…...

从零到一:OWASP ZAP实战渗透测试全流程解析
1. OWASP ZAP入门:渗透测试的瑞士军刀 第一次接触OWASP ZAP时,我完全被它复杂的界面吓到了。但用了三个月后,我发现这简直是Web安全测试的"瑞士军刀"——功能强大但需要正确打开方式。简单来说,ZAP就是个会自动帮你找网…...

HarnessGate:专为AI Agent设计的纯消息网关,实现多平台无缝桥接
1. 项目概述:一个纯粹的AI Agent消息网关如果你正在构建一个需要对接多个聊天平台(比如Telegram、Discord、Slack)的AI助手或客服机器人,你很可能已经踩过这样的坑:市面上主流的机器人框架,比如Botpress、L…...

Taotoken如何助力AIGC内容创作团队平衡效果与成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何助力AIGC内容创作团队平衡效果与成本 对于专注于短视频脚本、营销文案等AIGC内容生产的团队而言,频繁调用…...

开源高级提示词数据库:一键部署,解锁AI生产力
1. 项目概述:一个开箱即用的高级提示词数据库如果你和我一样,经常在ChatGPT、Claude或者Midjourney这类AI工具里折腾,那你肯定明白一个道理:好的提示词(Prompt)就是生产力。但问题来了,那些真正…...

3步掌握SubtitleOCR:从视频到可编辑字幕的智能转换指南
3步掌握SubtitleOCR:从视频到可编辑字幕的智能转换指南 【免费下载链接】SubtitleOCR 快如闪电的硬字幕提取工具。仅需苹果M1芯片或英伟达3060显卡即可达到10倍速提取。A very fast tool for video hardcode subtitle extraction 项目地址: https://gitcode.com/g…...

雨夜便利店的光,刚好够照亮你这一秒的疲惫
雨声比闹钟更懂你凌晨一点十七分,耳机里循环着一首没名字的 lo-fi beat,窗外的雨没停,也没下大,就那么轻轻敲着空调外机和生锈的铁皮棚。你站在楼道口犹豫要不要出门买泡面,其实不是饿,是心里空了一小块&am…...

SPT-AKI存档编辑器完全手册:单机版塔科夫终极存档修改指南
SPT-AKI存档编辑器完全手册:单机版塔科夫终极存档修改指南 【免费下载链接】SPT-AKI-Profile-Editor Программа для редактирования профиля игрока на сервере SPT-AKI 项目地址: https://gitcode.com/gh_mirro…...
详解与最佳实践)
HoRain云--PHP日期格式化函数date()详解与最佳实践
🎬 HoRain 云小助手:个人主页 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个超棒的服务器购买网站,性价比超高,大内存超划算!忍不住分享一下给大家。点击跳转到网站。 目录 ⛳️ 推荐 …...