YOLO物体检测-系列教程1:YOLOV1整体解读(预选框/置信度/分类任/回归任务/损失函数/公式解析/置信度/非极大值抑制)
🎈🎈🎈YOLO 系列教程 总目录
YOLOV1整体解读
YOLOV2整体解读
YOLOV1提出论文:You Only Look Once: Unified, Real-Time Object Detection
1、物体检测经典方法
- two-stage(两阶段):Faster-rcnn Mask-Rcnn系列
- one-stage(单阶段):YOLO系列

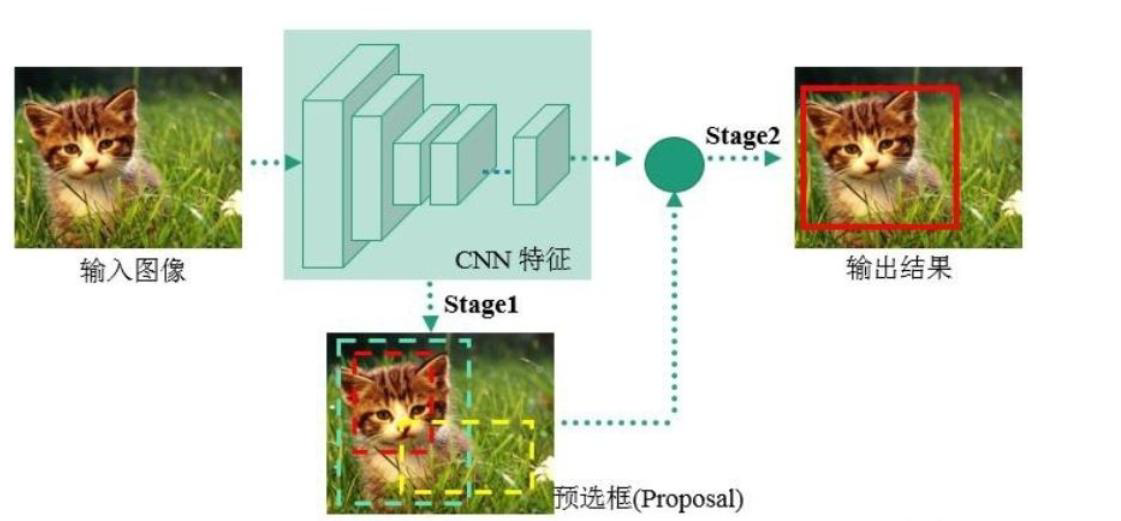
- 最核心的优势:速度非常快,适合做实时检测任务!
- 但是缺点也是有的,效果通常情况下不会太好!
2、机器学习分类任务评价指标
机器学习 分类任务 评价指标
3、YOLOV1简介
- 经典的物体检测算法
- You Only Look Once,名字就已经说明了一切
- 把检测问题转化为回归问题,一个CNN就搞定了
- 可以对视频进行检测,应用领域非常广
只需要一个起始位置坐标,加上长和宽,即(x,y,w,h),就能把一个物体框出来了,这就是转化为回归问题

YOLO算法,在当时15、16年等了很久,因为Faster R-CNN精度高,但是太慢了,速度在当时比精度更重要
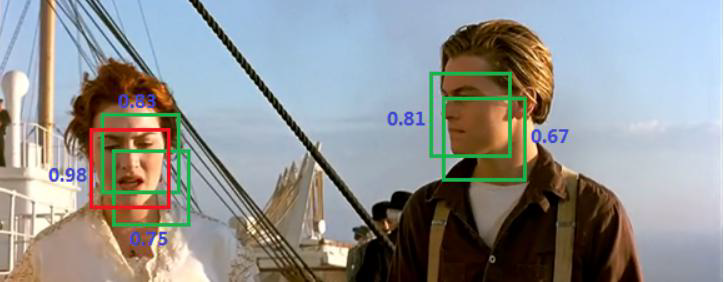
4、YOLOV1预测流程

- 把图像分词S*S个格子
- 遍历每个格子,如果哪一个物体的中心点落在了这个格子,那么这个格子就负责预测这个物体
- 得到了若干个格子,遍历每一个格子
- 根据当前的格子都生成两个候选框,找出一个接近的框
- 现在有了一个这个物体的位置,需要调整框的长宽来得到最终结果
- 在调整的过程中会得到很多个候选框,每个候选框都会得到一个confidence值(即置信度,这个置信度表示了当前框住的部分是否是一个我们需要检测的物体)
- 置信度低的框会被过滤掉(因为目标格子可能会有多个,但是不一定都符合)
总结:
首先输入就是一个S*S个格子,每一个格子都产生两个候选框,产生两个候选框进行微调,但是不是所有候选框都进行微调,需要切实有物体的,什么时候有物体,通过执行度来判断
5、整体网络架构
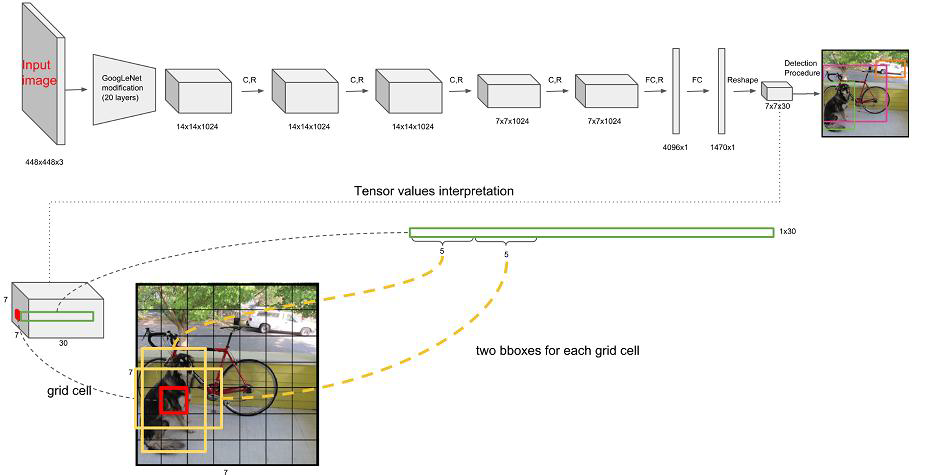
输入图像是一个448*448,是一个固定值(这个固定值并不意味着只能检测固定大小的东西,这个固定值是通过openCV的resize到固定值得到,里面的物体会进行缩放,最后的框会映射到一个完整的原始图像中),这个固定值也导致了一些问题,在v1版本中有一定的局限性
- 输入数据(448,448,3)
- 经过20层修改的GoogLeNet,得到(14,14,1024)
- 经过2次Conv+relu,得到(14,14,1024)
- 经过2次Conv+relu,得到(7,7,1024)
- 一次拉平操作+FC+relu,得到(4096,1)
- 一次全连接(1470,1)
- reshape(7,7,30)
- 生成检测
在网络的最后得到一个(7,7,30)的特征图,这个特征图表示的意义:77表示前面提到的SS个grid格子,在7*7的格子中,每一个格子都有30个值,每一个格子都要预测出30个值。
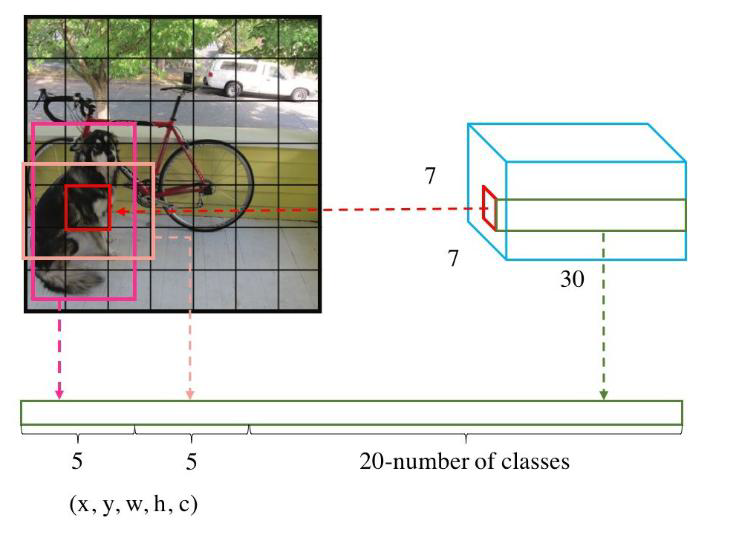
30个值的意义:
- 7*7个格子分别对应 B 1 B_1 B1、 B 2 B_2 B2两个框,比如 B 1 B_1 B1框,对应了4个值 ( x 1 , y 1 , w 1 , b 1 ) (x_1,y_1,w_1,b_1) (x1,y1,w1,b1)就可以表示成一个唯一的框,但是这里的 x 1 和 y 1 x_1和y_1 x1和y1不是一个具体的坐标值,是经过归一化后得到的一个在0到1之间的相对值
- 因此 B 2 B_2 B2框,也对应了4个值 ( x 2 , y 2 , w 2 , b 2 ) (x_2,y_2,w_2,b_2) (x2,y2,w2,b2)
- 此外每一个框,是不是有框住了物体呢?有一个置信度C值。
- 因此 B 1 B_1 B1框,对应5个值 ( x 1 , y 1 , w 1 , b 1 , C 1 ) (x_1,y_1,w_1,b_1,C_1) (x1,y1,w1,b1,C1), B 2 B_2 B2框,对应了5个值 ( x 2 , y 2 , w 2 , b 2 , C 2 ) (x_2,y_2,w_2,b_2,C_2) (x2,y2,w2,b2,C2)
- 在前面提到了一共有30个值,前10个对应了这10个值,后面的20个值,则是对应了20分类,也就是对应了20个类别的概率值。
了解了30个值的意义,就了解了(7,7,30),就基本懂了yolo-v1了
6、损失函数计算公式
6.1 每个数字的意义
前面我们已经解释了每个数字的意义
- 10 = (X,Y,W,H,C)* 2
- 当前数据集有20个类别
- 7*7代表最终网格的大小
- SS(B*5+C)
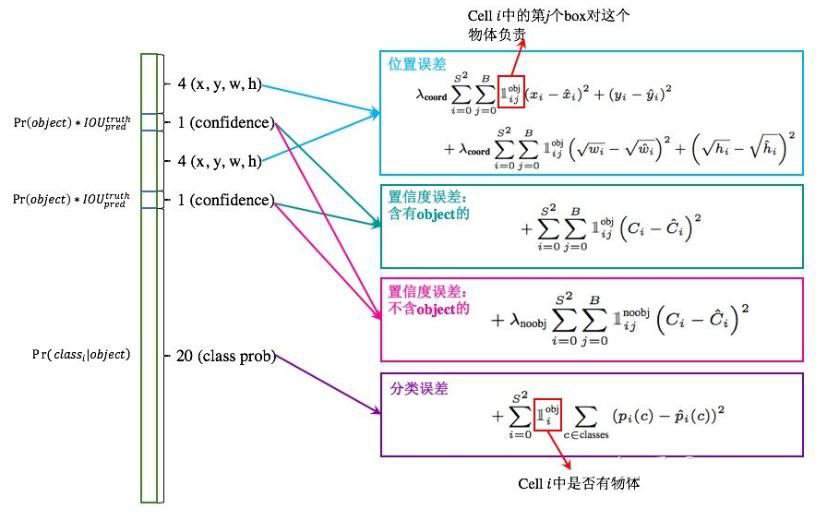
6.2 坐标回归误差(中心点定位)
位置损失计算的是(X,Y,W,H)这4个值和真实值之间的误差
前面我们仔细解释了各项参数的含义,下面陆续给出整个损失计算公式,首先是位置损失,位置损失又包含两部分,分别是坐标和长宽,不是一个具体的坐标值,是经过归一化后得到的一个在0到1之间的相对值
λ c o o r d ∑ i = 0 S 2 ∑ j = 0 B 1 i j o b j [ ( x i − x ^ i ) 2 + ( y i − y ^ i ) 2 ] λ_{coord}\sum_{i=0}^{S^2}\sum_{j=0}^{B}1^{obj}_{ij}[(x_i-\hat{x}_i)^2+(y_i-\hat{y}_i)^2] λcoordi=0∑S2j=0∑B1ijobj[(xi−x^i)2+(yi−y^i)2]
- λ c o o r d λ_{coord} λcoord=5:超参数,坐标损失的权重
- ∑ i = 0 S 2 \sum_{i=0}^{S^2} ∑i=0S2:遍历所有的grid cell格子
- ∑ j = 0 B \sum_{j=0}^{B} ∑j=0B:遍历所有的bounding box候选框
- 指示函数 1 i j o b j 1^{obj}_{ij} 1ijobj:挑选负责检测物体的bbox
- ( x i − x ^ i ) 2 + ( y i − y ^ i ) 2 (x_i-\hat{x}_i)^2+(y_i-\hat{y}_i)^2 (xi−x^i)2+(yi−y^i)2:中心点定位 预测值和 标签值 的差的平方和
6.3 坐标回归误差(长宽定位)
+ λ c o o r d ∑ i = 0 S 2 ∑ j = 0 B 1 i j o b j [ ( w i − w ^ i ) 2 + ( h i − h ^ i ) 2 ] +λ_{coord}\sum_{i=0}^{S^2}\sum_{j=0}^{B}1^{obj}_{ij}[(\sqrt{w_i}-\sqrt{\hat{w}_i})^2+(\sqrt{h_i}-\sqrt{\hat{h}_i})^2] +λcoordi=0∑S2j=0∑B1ijobj[(wi−w^i)2+(hi−h^i)2]
- λ c o o r d λ_{coord} λcoord=5:超参数,坐标损失的权重
- ∑ i = 0 S 2 \sum_{i=0}^{S^2} ∑i=0S2:遍历所有的grid cell格子
- ∑ j = 0 B \sum_{j=0}^{B} ∑j=0B:遍历所有的bounding box候选框
- 指示函数 1 i j o b j 1^{obj}_{ij} 1ijobj:挑选负责检测物体的bbox
- ( w i − w ^ i ) 2 + ( h i − h ^ i ) 2 (\sqrt{w_i}-\sqrt{\hat{w}_i})^2+(\sqrt{h_i}-\sqrt{\hat{h}_i})^2 (wi−w^i)2+(hi−h^i)2 :宽高定位 预测值和标签值 算术平方根的差的平方和
求根号能使小框对误差更敏感
6.4 置信度回归误差(含有object)
主要是判断当前预测的是前景还是背景,含有object物体即为前景
∑ i = 0 S 2 ∑ j = 0 B 1 i j o b j ( C i − C ^ i ) 2 \sum_{i=0}^{S^2}\sum_{j=0}^{B}1^{obj}_{ij}(C_i-\hat{C}_i)^2 i=0∑S2j=0∑B1ijobj(Ci−C^i)2
- ∑ i = 0 S 2 \sum_{i=0}^{S^2} ∑i=0S2:遍历所有的grid cell格子
- ∑ j = 0 B \sum_{j=0}^{B} ∑j=0B:遍历所有的bounding box候选框
- 指示函数 1 i j o b j 1^{obj}_{ij} 1ijobj:挑选负责检测物体的bbox
- ( C i − C ^ i ) 2 : (C_i-\hat{C}_i)^2: (Ci−C^i)2: 预测值和标签值差的平方和
- C i C_i Ci :从模型正向推断结果为SS(B*5+C)维向量找到这个bbox的confidence score
- C ^ i \hat{C}_i C^i :计算这个bbox与ground truth的IOU
6.5 置信度回归误差(不含有object)
λ n o o b j ∑ i = 0 S 2 ∑ j = 0 B 1 i j n o o b j ( C i − C ^ i ) 2 λ_{noobj}\sum_{i=0}^{S^2}\sum_{j=0}^{B}1^{noobj}_{ij}(C_i-\hat{C}_i)^2 λnoobji=0∑S2j=0∑B1ijnoobj(Ci−C^i)2
- λ n o o b j = 0.5 λ_{noobj}=0.5 λnoobj=0.5:超参数,非目标置信度损失的权重
- ∑ i = 0 S 2 \sum_{i=0}^{S^2} ∑i=0S2:遍历所有的grid cell格子
- ∑ j = 0 B \sum_{j=0}^{B} ∑j=0B:遍历所有的bounding box候选框
- 指示函数 1 i j n o o b j 1^{noobj}_{ij} 1ijnoobj:挑选不负责检测物体的bbox
- ( C i − C ^ i ) 2 (C_i-\hat{C}_i)^2 (Ci−C^i)2 :预测值和标签值差的平方和
6.6 分类误差
∑ i = 0 S 2 1 i o b j ∑ C ∈ c l a s s e s ( p i ( C ) − p ^ i ( c ) ) 2 \sum_{i=0}^{S^2}1^{obj}_{i}\sum_{C∈classes}(p_i(C)-\hat{p}_i(c))^2 i=0∑S21iobjC∈classes∑(pi(C)−p^i(c))2
- ∑ i = 0 S 2 \sum_{i=0}^{S^2} ∑i=0S2:遍历所有的grid cell格子
- 1 i o b j 1^{obj}_{i} 1iobj:挑选不负责检测物体的bbox
- ∑ C ∈ c l a s s e s \sum_{C∈classes} ∑C∈classes:遍历所有类别
7、指示函数
前面的误差计算公式提到了三个指示函数:
7.1 第1个 1 i o b j 1^{obj}_{i} 1iobj
1 i o b j = { 1 , 如果第 i 个网格单元包含目标。 0 , 否则。 1^{obj}_{i} = \begin{cases} 1, & \text{如果第 } i \text{ 个网格单元包含目标。} \\ 0, & \text{否则。} \end{cases} 1iobj={1,0,如果第 i 个网格单元包含目标。否则。
1 i o b j 1^{obj}_{i} 1iobj:第i个grid cell是否包含物体,也即是否有groud truth框的中心点落在grid cell中,若有则为1,否则为0
7.2 第2个 1 i j o b j 1^{obj}_{ij} 1ijobj
1 i j o b j = { 1 , 如果第 i 个网格单元中的第 j 个边界框预测到了目标。 0 , 否则。 1^{obj}_{ij} = \begin{cases} 1, & \text{如果第 } i \text{ 个网格单元中的第 } j \text{ 个边界框预测到了目标。} \\ 0, & \text{否则。} \end{cases} 1ijobj={1,0,如果第 i 个网格单元中的第 j 个边界框预测到了目标。否则。
1 i j n o o b j 1^{noobj}_{ij} 1ijnoobj:第i个grid cell的第j个bounding box若负责预测物体则为1,否则为0
7.3 第3个 1 i j n o o b j 1^{noobj}_{ij} 1ijnoobj
1 i j n o o b j = { 1 , 如果第 i 个网格单元中的第 j 个边界框没有预测到目标。 0 , 否则。 1^{noobj}_{ij} = \begin{cases} 1, & \text{如果第 } i \text{ 个网格单元中的第 } j \text{ 个边界框没有预测到目标。} \\ 0, & \text{否则。} \end{cases} 1ijnoobj={1,0,如果第 i 个网格单元中的第 j 个边界框没有预测到目标。否则。
1 i j n o o b j 1^{noobj}_{ij} 1ijnoobj:第i个grid cell的第j个bounding box若不负责预测物体则为1,否则为0
- 1 i j o b j 1^{obj}_{ij} 1ijobj为1, 1 i o b j 1^{obj}_{i} 1iobj也必为1
- 1 i j o b j 1^{obj}_{ij} 1ijobj为1, 1 i j n o o b j 1^{noobj}_{ij} 1ijnoobj必为0
8、NMS(非极大值抑制)
置信度是可以设置的,设置的较大的时候则比较严格,可能出现有些物体没有被检测,较小的时候可能一个物体出现多个预选框。
但是有时候就算设置较大的置信度,还是出现了多个预选框,我们可以进行非极大值抑制操作,对预选框的置信度进行排序,最终只选取较大的预选框。
YOLOV1到这里内容就全部都结束了,那YOLOV1有哪些问题呢?
- 小物体检测效果不好:当前一个grid cell只预测一个类别,当有两个物体高度重合在一起的时候,比如一只狗的旁边还有一只猫,那可能只能检测出狗。
- 多标签预测效果不好:这里介绍的是20分类,实际任务可以设置更多或者更少的分类,假设标签中有狗这个类别,还有斑点狗,还有哈士奇之类的,可能一个物体对应了两个标签,既是狗又是哈士奇,softmax可能无法拿到多个标签
那么YOLOV2做了哪些改进呢?
YOLOV1整体解读
YOLOV2整体解读
相关文章:
YOLO物体检测-系列教程1:YOLOV1整体解读(预选框/置信度/分类任/回归任务/损失函数/公式解析/置信度/非极大值抑制)
🎈🎈🎈YOLO 系列教程 总目录 YOLOV1整体解读 YOLOV2整体解读 YOLOV1提出论文:You Only Look Once: Unified, Real-Time Object Detection 1、物体检测经典方法 two-stage(两阶段):Faster-rc…...
2023/9/12 -- C++/QT
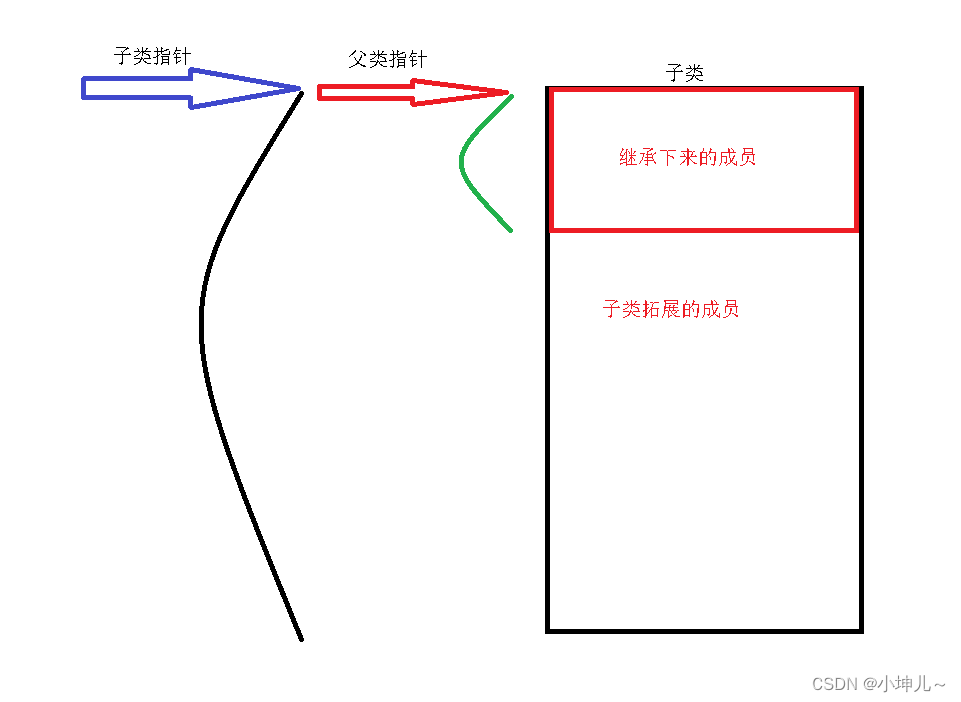
作业 实现一个图形类(Shape),包含受保护成员属性:周长、面积, 公共成员函数:特殊成员函数书写 定义一个圆形类(Circle),继承自图形类,包含私有属性…...
【Purple Pi OH RK3566鸿蒙开发板】OpenHarmony音频播放应用,真实体验感爆棚!
本文转载于Purple Pi OH开发爱好者,作者ITMING 。 原文链接:https://bbs.elecfans.com/jishu_2376383_1_1.html 01注意事项 DevEco Studio 4.0 Beta2(Build Version: 4.0.0.400) OpenHarmony SDK API 9 创建工程类型选择Appli…...

Android rom开发:9.0系统上实现4G wifi 以太网共存
framework层修改网络优先级,4G > wifi > eth 修改patch如下: diff --git a/frameworks/base/services/core/java/com/android/server/connectivity/NetworkAgentInfo.java b/frameworks/base/services/core/java/com/android/server/connectivit…...

高速自动驾驶HMI人机交互
概述 目的 本文档的目的是描述高速自动驾驶功能涉及的HMI显示需求技术规范和设计说明。 范围 术语及缩写 设计与实验标准 设计标准 设计标准-非法规类设计标准-法规类 HMI交互需求 CL4功能界面 HMI显示器[伊1] 中应包含CL4功能设置界面,提供给用户进行设置操作或显…...

【自然语言处理】关系抽取 —— SOLS 讲解
SOLS 论文信息 标题:Speaker-Oriented Latent Structures for Dialogue-Based Relation Extraction 作者:Guoshun Nan, Guoqing Luo, Sicong Leng, Yao Xiao, Wei Lu 发布时间与更新时间:2021.09.11 主题:自然语言处理、关系抽取、对话场景、跨语句、DialogRE、GCN arXiv:…...

周易算卦流程c++实现
代码 #include<iostream> using namespace std; #include<vector> #include<cstdlib> #include<ctime> #include<Windows.h>int huaYiXiangLiang(int all, int& left) {Sleep(3000);srand(time(0));left rand() % all 1;while (true) {if…...
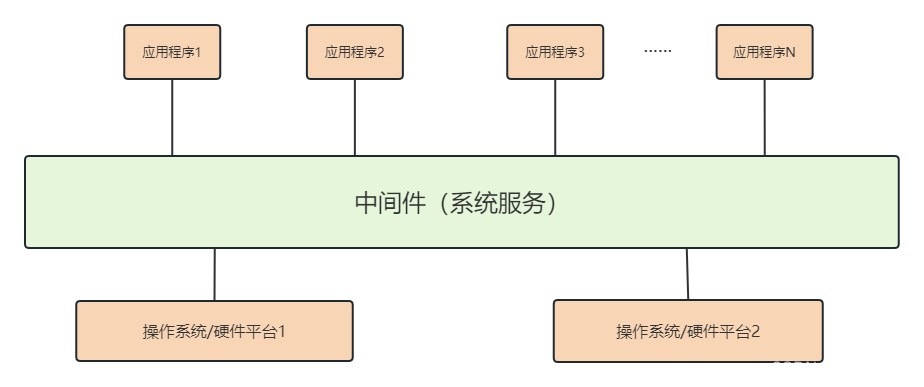
软件架构设计(十三) 构件与中间件技术
中间件的定义 其实中间件是属于构件的一种。是一种独立的系统软件或服务程序,可以帮助分布式应用软件在不同技术之间共享资源。 我们把它定性为一类系统软件,比如我们常说的消息中间件,数据库中间件等等都是中间件的一种体现。一般情况都是给应用系统提供服务,而不是直接…...

PyTorch深度学习实战——基于ResNet模型实现猫狗分类
PyTorch深度学习实战——基于ResNet模型实现猫狗分类 0. 前言1. ResNet 架构2. 基于预训练 ResNet 模型实现猫狗分类相关链接 0. 前言 从 VGG11 到 VGG19,不同之处仅在于网络层数,一般来说,神经网络越深,它的准确率就越高。但并非…...
机器学习第六课--朴素贝叶斯
朴素贝叶斯广泛地应用在文本分类任务中,其中最为经典的场景为垃圾文本分类(如垃圾邮件分类:给定一个邮件,把它自动分类为垃圾或者正常邮件)。这个任务本身是属于文本分析任务,因为对应的数据均为文本类型,所以对于此类任务我们首先…...
基于Java+SpringBoot+Vue的图书借还小程序的设计与实现(亮点:多角色、点赞评论、借书还书、在线支付)
图书借还管理小程序 一、前言二、我的优势2.1 自己的网站2.2 自己的小程序(小蔡coding)2.3 有保障的售后2.4 福利 三、开发环境与技术3.1 MySQL数据库3.2 Vue前端技术3.3 Spring Boot框架3.4 微信小程序 四、功能设计4.1 主要功能描述 五、系统实现5.1 小…...
【校招VIP】前端计算机网络之UDP相关
考点介绍 UDP是一个简单的面向消息的传输层协议,尽管UDP提供标头和有效负载的完整性验证(通过校验和),但它不保证向上层协议提供消息传递,并且UDP层在发送后不会保留UDP 消息的状态。因此,UDP有时被称为不可…...

前缀和实例4(和可被k整除的子数组)
题目: 给定一个整数数组 nums 和一个整数 k ,返回其中元素之和可被 k 整除的(连续、非空) 子数组 的数目。 子数组 是数组的 连续 部分。 示例 1: 输入:nums [4,5,0,-2,-3,1], k 5 输出:7 …...

Android获取系统读取权限
第一步在Androidifest.xml文件中加上授权语句 <uses-permission android:name"android.permission.WRITE_EXTERNAL_STORAGE"/><uses-permission android:name"android.permission.READ_EXTERNAL_STORAGE"/>并且在Application标签下添加 androi…...
输入学生成绩(最多不超过40),输入为负值时表示输入结束,统计成绩高于平均成绩的学生人数
#include<stdio.h> #define N 40 int scanfscore(int score[N]) {int i -1;do {i;printf("输入学生成绩:");scanf("%d", &score[i]);} while (score[i] > 0);return i; } int average(int score[N], int n) {int j 0;int k 0;double sum …...
【力扣周赛】第 363 场周赛(完全平方数和质因数分解)
文章目录 竞赛链接Q1:100031. 计算 K 置位下标对应元素的和竞赛时代码写法2——手写二进制中1的数量 Q2:100040. 让所有学生保持开心的分组方法数(排序后枚举分界)竞赛时代码 Q3:100033. 最大合金数(二分答…...
RocketMQ的介绍和环境搭建
一、介绍 我也不知道是啥,知道有什么用、怎么用就行了,说到mq(MessageQueue)就是消息队列,队列是先进先出的一种数据结构,但是RocketMQ不一定是这样,简单的理解一下,就是临时存储的…...
【web开发】7、Django(2)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 一、部门列表二、部门管理(增删改)三、用户管理过渡到modelform组件四、modelform实例:靓号操作五、自定义分页组件六、datepick…...

Prometheus+Grafana可视化监控【Nginx状态】
文章目录 一、安装Docker二、安装Nginx(Docker容器方式)三、安装Prometheus四、安装Grafana五、Pronetheus和Grafana相关联六、安装nginx_exporter七、Grafana添加Nginx监控模板 一、安装Docker 注意:我这里使用之前写好脚本进行安装Docker,如果已经有D…...

R 语言的安装教程
一、下载相关软件 1、R 下载 官网:R: The R Project for Statistical Computing 找到中国镜像,下载快 历史版本点击这里 2、Rtools 下载 进入镜像后,点击这里 然后选择与上面下载的R版本相对应的版本即可 3、Rstudio 下载 官网࿱…...

模块三-数据清洗与预处理——14. 重复值处理
14. 重复值处理 1. 概述 重复值是数据中的常见问题,可能来自数据录入错误、系统重复导出、数据合并等原因。重复数据会导致统计偏差、模型过拟合,需要在数据预处理阶段处理。 import pandas as pd import numpy as np# 创建包含重复值的示例数据 df pd.…...

降AI率软件数据安全测评:嘎嘎降不留存vs拿你论文训练AI!
降AI率软件数据安全测评:嘎嘎降不留存vs拿你论文训练AI! 一个月后导师消息:「你论文跟去年某高校论文相似度异常」 我硕士毕业季预算紧,搜降 AI 工具时格外注意「免费」「不限字数」这种关键词。找到一家工具——免费额度大、价…...

Origin 9 绘图避坑指南:7个高频问题解决,让你的科研图表一次成型
Origin 9 科研绘图实战:7个高频问题深度解析与优化方案 科研绘图是数据可视化的重要环节,而Origin 9作为经典的科学绘图软件,其功能强大但操作细节繁多。许多用户在初次接触或日常使用中常会遇到各种棘手问题,导致绘图效率低下、图…...

改进灰狼算法天线优化设计【附代码】
✨ 长期致力于灰狼优化算法、直线阵列天线、平面阵列天线、微带天线研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)Logistic-Tent双重混沌初始化与非…...

开源AR虚拟试衣项目openclaw-genpark-ar-tryon核心技术解析与实践
1. 项目概述:当AR试衣遇见开源社区最近在逛GitHub的时候,偶然发现了一个挺有意思的项目,叫openclaw-genpark-ar-tryon。光看名字,一股浓浓的“开源”和“增强现实”味儿就扑面而来了。点进去一看,果然,这是…...

科技与科学领域重点新闻摘要-2026年5月13日
科技与科学领域重点新闻摘要 日期: 2026年5月13日 1. Nature发布2026年最值得关注的七大技术 核心要点: 《自然》杂志评选出2026年七大关键技术,包括异种生物器官移植、AI天气预报、可控核聚变、光学显微脑图谱、mRNA疗法、高精度天文成像和量子计算,这…...

ARM PMSWINC寄存器解析与性能监控实践
1. ARM PMSWINC寄存器深度解析与性能监控实战在ARM架构的性能监控领域,PMSWINC(Performance Monitors Software Increment)寄存器是一个关键但常被忽视的组件。作为一位长期从事ARM平台性能调优的工程师,我将在本文中分享这个寄存…...

【场景生成与研究】考虑时序相关性MC的场景生成与削减研究附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量matlab电子书和数学建模资料 dz…...

制作程序统计企业资质办理流程数据,梳理耗时节点,缩短资质办理周期,助力企业快速开展商务工作。
聚焦“企业资质办理流程数据的统计与周期优化”,适用于商务智能(BI)课程中的流程挖掘(Process Mining)与运营效率分析场景。一、实际应用场景描述在工程建设、招投标、医药、金融等行业,企业常需办理各类资…...

本地视频怎么去水印?2026实测去水印方法+本地视频去水印软件推荐
本地视频怎么去水印?2026实测去水印方法本地视频去水印软件推荐 视频上有水印,是很多人日常都会碰到的麻烦。录屏时工具自动打上的 Logo、剪辑软件试用期留下的标记、从平台保存下来时带着的角标……这些水印有时候影响不大,但只要你想二次使…...