Java手写AVL树
Java手写AVL树
1. AVL树实现思路原理
为了解释AVL树的实现思路原理,下面使用Mermanid代码表示该算法的思维导图:
2. AVL树的手写必要性
手写AVL树的必要性主要体现在以下几个方面:
- 深入理解AVL树的原理和实现过程,加深对数据结构和算法的理解。
- 学习如何进行平衡二叉树的插入、删除和查找操作。
- 实际应用中可能需要自定义平衡二叉树的数据结构,手写AVL树可以满足特定需求。
3. AVL树的市场调查
市场调查显示,AVL树在各种领域都有广泛的应用。特别是在需要高效插入、删除和查找操作的场景下,AVL树具有较好的性能表现。常见的应用领域包括数据库索引、网络路由算法、编译器优化等。
4. AVL树的实现详细介绍和步骤
步骤1:定义AVL树的节点结构
首先,我们需要定义AVL树的节点结构,包括节点值、左子节点、右子节点、平衡因子等属性。
class AVLNode {int value;AVLNode left;AVLNode right;int balanceFactor;public AVLNode(int value) {this.value = value;this.left = null;this.right = null;this.balanceFactor = 0;}
}
步骤2:实现AVL树的插入操作
AVL树的插入操作是对二叉搜索树的插入操作进行了平衡调整。具体步骤如下:
- 在二叉搜索树中插入新节点。
- 更新插入路径上各节点的平衡因子。
- 如果某个节点的平衡因子绝对值大于1,则进行相应的平衡调整。
class AVLTree {private AVLNode root;// 插入节点public void insert(int value) {root = insertNode(root, value);}// 插入节点辅助函数private AVLNode insertNode(AVLNode node, int value) {if (node == null) {return new AVLNode(value);}if (value < node.value) {node.left = insertNode(node.left, value);} else if (value > node.value) {node.right = insertNode(node.right, value);} else {return node; // 值已存在,不插入}// 更新平衡因子node.balanceFactor = Math.max(getHeight(node.left), getHeight(node.right)) + 1;// 平衡调整int balance = getBalanceFactor(node);if (balance > 1 && value < node.left.value) {return rightRotate(node);}if (balance < -1 && value > node.right.value) {return leftRotate(node);}if (balance > 1 && value > node.left.value) {node.left = leftRotate(node.left);return rightRotate(node);}if (balance < -1 && value < node.right.value) {node.right = rightRotate(node.right);return leftRotate(node);}return node;}// 获取节点高度private int getHeight(AVLNode node) {if (node == null) {return 0;}return Math.max(getHeight(node.left), getHeight(node.right)) + 1;}// 获取节点的平衡因子private int getBalanceFactor(AVLNode node) {if (node == null) {return 0;}return getHeight(node.left) - getHeight(node.right);}// 左旋转private AVLNode leftRotate(AVLNode node) {AVLNode rightChild = node.right;AVLNode leftGrandChild = rightChild.left;rightChild.left = node;node.right = leftGrandChild;node.balanceFactor = Math.max(getHeight(node.left), getHeight(node.right)) + 1;rightChild.balanceFactor = Math.max(getHeight(rightChild.left), getHeight(rightChild.right)) + 1;return rightChild;}// 右旋转private AVLNode rightRotate(AVLNode node) {AVLNode leftChild = node.left;AVLNode rightGrandChild = leftChild.right;leftChild.right = node;node.left = rightGrandChild;node.balanceFactor = Math.max(getHeight(node.left), getHeight(node.right)) + 1;leftChild.balanceFactor = Math.max(getHeight(leftChild.left), getHeight(leftChild.right)) + 1;return leftChild;}
}
步骤3:实现AVL树的删除操作
AVL树的删除操作也是对二叉搜索树的删除操作进行了平衡调整。具体步骤如下:
- 在二叉搜索树中删除目标节点。
- 更新删除路径上各节点的平衡因子。
- 如果某个节点的平衡因子绝对值大于1,则进行相应的平衡调整。
class AVLTree {// ...// 删除节点public void delete(int value) {root = deleteNode(root, value);}// 删除节点辅助函数private AVLNode deleteNode(AVLNode node, int value) {if (node == null) {return null;}if (value < node.value) {node.left = deleteNode(node.left, value);} else if (value > node.value) {node.right = deleteNode(node.right, value);} else {if (node.left == null || node.right == null) {node = (node.left != null) ? node.left :node.right;} else {AVLNode minNode = findMin(node.right);node.value = minNode.value;node.right = deleteNode(node.right, minNode.value);}}if (node == null) {return null;}// 更新平衡因子node.balanceFactor = Math.max(getHeight(node.left), getHeight(node.right)) + 1;// 平衡调整int balance = getBalanceFactor(node);if (balance > 1 && getBalanceFactor(node.left) >= 0) {return rightRotate(node);}if (balance > 1 && getBalanceFactor(node.left) < 0) {node.left = leftRotate(node.left);return rightRotate(node);}if (balance < -1 && getBalanceFactor(node.right) <= 0) {return leftRotate(node);}if (balance < -1 && getBalanceFactor(node.right) > 0) {node.right = rightRotate(node.right);return leftRotate(node);}return node;}// 查找最小节点private AVLNode findMin(AVLNode node) {while (node.left != null) {node = node.left;}return node;}
}
步骤4:实现AVL树的查找操作
AVL树的查找操作与二叉搜索树的查找操作相同,不需要进行平衡调整。
class AVLTree {// ...// 查找节点public boolean search(int value) {return searchNode(root, value);}// 查找节点辅助函数private boolean searchNode(AVLNode node, int value) {if (node == null) {return false;}if (value < node.value) {return searchNode(node.left, value);} else if (value > node.value) {return searchNode(node.right, value);} else {return true;}}
}
步骤5:测试AVL树的各个操作
public class Main {public static void main(String[] args) {AVLTree tree = new AVLTree();tree.insert(10);tree.insert(20);tree.insert(30);tree.insert(40);tree.insert(50);tree.insert(25);System.out.println("AVL树是否包含值30:" + tree.search(30)); // 输出:truetree.delete(30);System.out.println("AVL树是否包含值30:" + tree.search(30)); // 输出:false}
}
相关文章:

Java手写AVL树
Java手写AVL树 1. AVL树实现思路原理 为了解释AVL树的实现思路原理,下面使用Mermanid代码表示该算法的思维导图: #mermaid-svg-ycH8kKpzVk2HWEby {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid…...

运维自动化:提高效率的秘诀
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
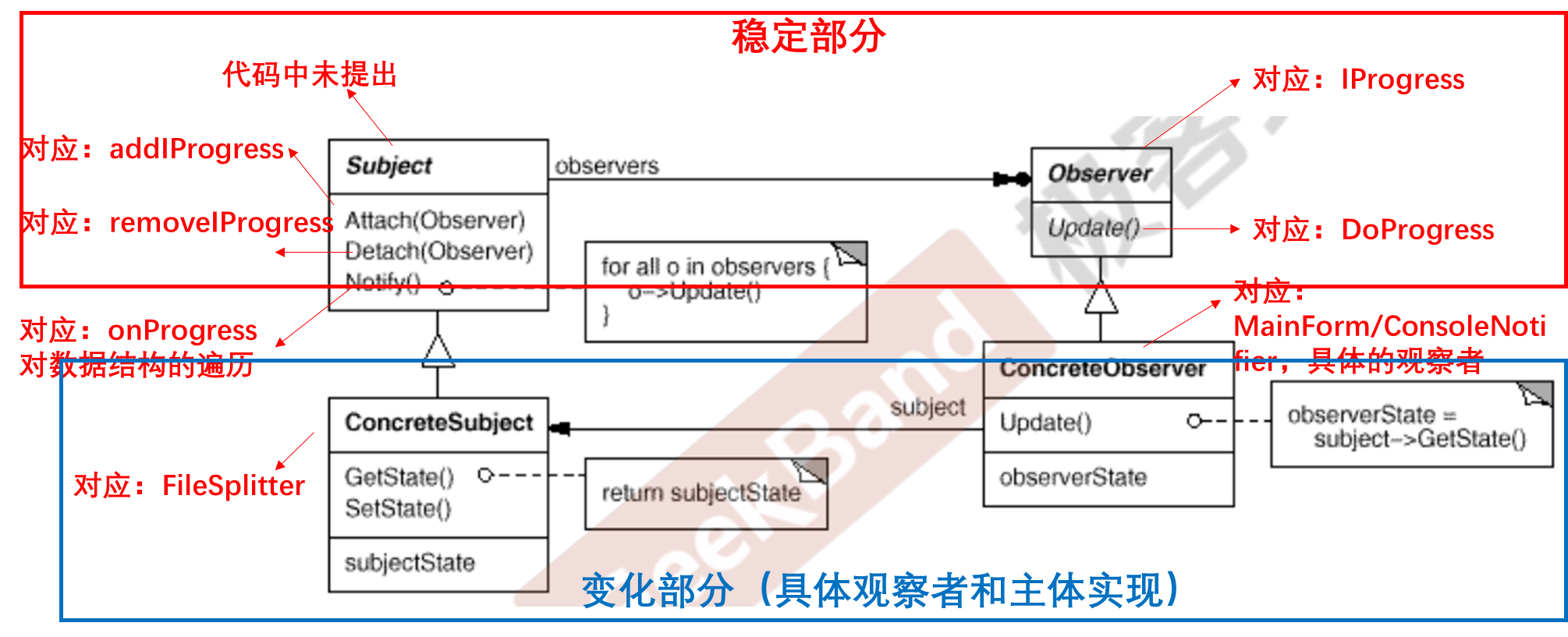
C++设计模式_05_Observer 观察者模式
接上篇,本篇将会介绍C设计模式中的Observer 观察者模式,和前2篇模板方法Template Method及Strategy 策略模式一样,仍属于“组件协作”模式。Observer 在某些领域也叫做 Event 。 文章目录 1. 动机( Motivation)2. 代码…...

github网站打不开,hosts文件配置
首先获取github官网的ip地址, 打开cmd,输入ping github.com 配置: #github 140.82.114.4 github.com 199.232.69.194 github.global.ssl.fastly.net 185.199.108.153 assets-cdn.github.com 185.199.110.153 assets-cdn.github.com 185.199…...

总结PCB设计的经验
一般PCB基本设计流程如下:前期准备->PCB结构设计->PCB布局->布线->布线优化和丝印->网络和DRC检查和结构检查->制版。: : 第一:前期准备。这包括准备元件库和原理图。“工欲善其事,必先利其器”,要做出一…...
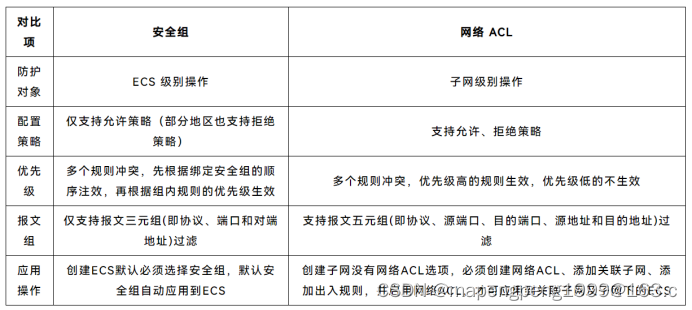
HCIE-HCS规划设计搭建
1、相关术语 1、等价路由 等价路由(Equal-cost routing)是一种网络路由策略,用于在网络中选择多个具有相同路由度量(路由距离或成本)的最佳路径之一来转发数据流量。 当存在多个路径具有相同的路由度量时,…...
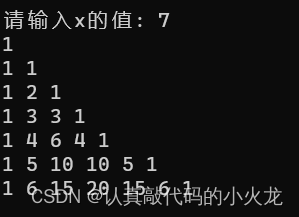
c语言输出杨辉三角
#include<stdio.h> int main() {int x 0; //表示杨辉三角的的大小int y 1;printf("请输入x的值: ");scanf("%d", &x);for (int i 0; i < x; i) {for (int j 0; j < i; j) {if (j 0 || i 0) {y 1;}else {y y * (i - j 1) / j;}pri…...
)
性能测试-持续测试及性能测试建设(22)
什么是持续测试? 持续测试定义为:在软件交付流水线中执行自动化测试的过程,目的是获得关于预发布软件业务风险的即时反馈。 完成持续测试,我们还是需要回到定义中,它有3个关键词:软件交付流水线、自动化测试、即时反馈。 首先,持续测试需要具备一条完整的流水线,其代表…...

嵌入式C 语言中的三块技术难点
C 语言在嵌入式学习中是必备的知识,甚至大部分操作系统都要围绕 C 语言进行,而其中有三块技术难点,几乎是公认级别的“难啃的硬骨头”。 今天就来带你将这三块硬骨头细细拆解开来,一定让你看明白了。 0x01 指针 指针是公认…...

【斗破年番】紫研新形象,萧炎终成翻海印,救援月媚,三宗决战
Hello,小伙伴们,我是小郑继续为大家深度解析斗破年番。 斗破苍穹年番动画更新了,小医仙帅气回归,萧炎紫妍成功进入山谷闭关苦修,美杜莎女王守护没多久,就因蛇人族求救离开。从官方公布的最新预告来看,萧炎紫…...
差分方程模型:国民总收入(GDP)的乘数-加速数模型
【背景知识-凯恩斯经济增长模型】 凯恩斯(John M.Keynes)建立了著名的国民经济增长模型。令Y表示国民总收入,C表示总消费,E为总支出,I表示投资,G为政府的投入(如基建等)。那么有 【6.1】 其中࿰…...
【C语言】指针和数组笔试题解析(1)
指针是C语言的灵魂,他的玩法多种多样,这篇文章带来指针的笔试题详解,可以帮助我们更好的理解与巩固指针的知识 目录 预备知识:题目:一维数组:二维数组: 题目比较多,但切记戒骄戒躁&a…...

Vue中组件的三种注册方式
组件的注册 1.全局注册: 在全局注册中,你需要确保在 Vue 根实例之前导入并注册组件。通常,你会在入口文件(例如 main.js)中执行这些操作。 // main.jsimport Vue from vue; import App from ./App.vue;// 导入全局组…...
docker 和k8s 入门
docker 和k8s 入门 本文是云原生的学习记录,可以参考以下文档 k8s https://www.yuque.com/leifengyang/oncloud 相关视频教程可参考如下 https://www.bilibili.com/video/BV13Q4y1C7hS?p2&vd_source0882f549dac54045384d4a921596e234 相对于公有云&#x…...

基于Yolov8的交通标志牌(TT100K)识别检测系统
1.Yolov8介绍 Ultralytics YOLOv8是Ultralytics公司开发的YOLO目标检测和图像分割模型的最新版本。YOLOv8是一种尖端的、最先进的(SOTA)模型,它建立在先前YOLO成功基础上,并引入了新功能和改进,以进一步提升性能和灵活…...

使用Python编写一个多线程的12306抢票程序
国庆长假即将到来,大家纷纷计划着自己的旅行行程。然而,对于很多人来说,抢购火车票人们成了一个令人头疼的问题。12306网站的服务器经常因为流量高而崩溃,导致抢票变得越来越严重异常困难。 首先,让我们来了解一下1230…...

DT Paint Effects工具(三)
管 分支 使用细枝 叶 力 使用湍流 流动画 渲染全局参数 建造盆栽植物...
SpringBoot整合Mybatis
目录 (1)引入依赖 (2)编写Mapper接口 (3)编写Mapper映射文件 (4)编写yml配置文件 (5)编写测试类 (1)引入依赖 <dependency>…...

Java后端使用POST请求向mysql中插入Json数据的问题
1.后端请求正常 但数据表中value没有值 原因 json数据属性不符合spring解析格式,json属性名称的大写字母不符合spring要求 以下为为错误示范 1 Test 以大写字母开头, 2 tTest 小写字母开头,但是第二个字母是大写解决方案 实体类属性加上Jso…...

豆瓣图书评分数据的可视化分析
导语 豆瓣是一个提供图书、电影、音乐等文化产品的社区平台,用户可以在上面发表自己的评价和评论,形成一个丰富的文化数据库。本文将介绍如何使用爬虫技术获取豆瓣图书的评分数据,并进行可视化分析,探索不同类型、不同年代、不同…...

Cesium进阶:CallbackProperty实现Entity动态数据绑定
1. 为什么需要动态数据绑定? 在数字孪生和实时监控场景中,我们经常需要将外部数据源(如GPS定位、传感器读数、MQTT消息)实时反映到三维场景中。传统做法是通过定时器不断更新Entity属性,但这种方式存在两个致命问题&am…...

Avogadro 2:开源分子可视化库的终极技术解析
Avogadro 2:开源分子可视化库的终极技术解析 【免费下载链接】avogadrolibs Avogadro libraries provide 3D rendering, visualization, analysis and data processing useful in computational chemistry, molecular modeling, bioinformatics, materials science,…...

收藏!小白程序员快速入行Agent开发:低门槛高薪风口已开启!
本文详细介绍了Agent开发领域的入门要求,强调Python工程能力、LLM API调用、RAG技术、Function Calling原理等核心技能。文章指出,虽然Agent开发对学历要求不高,但需掌握扎实的技术栈和具备实战项目经验,建议小白抓住当前低门槛窗…...

如何在5分钟内快速上手LeRobot机器人AI控制框架:从零到一的完整指南
如何在5分钟内快速上手LeRobot机器人AI控制框架:从零到一的完整指南 【免费下载链接】lerobot 🤗 LeRobot: Making AI for Robotics more accessible with end-to-end learning 项目地址: https://gitcode.com/GitHub_Trending/le/lerobot 还在为…...

工程思维跨界精酿:从电路板到啤酒桶的系统化创新实践
1. 项目概述:从电路板到啤酒桶的跨界创业在圣保罗的某个欢乐时光里,几位刚结束一天工作的电气工程师,一边喝着工业拉格,一边抱怨着市面上千篇一律的啤酒风味。他们聊着示波器、PCB布线和信号完整性,也聊着麦芽的甜度、…...

基于OpenClaw的轻量级AI内容工厂:多智能体协作与自动化创作实践
1. 项目概述:一个轻量级AI内容创作工厂如果你正在寻找一个能快速上手、开箱即用的AI内容创作解决方案,那么aiclublight这个项目可能会让你眼前一亮。它本质上是一个基于OpenClaw框架构建的“AI内容工厂”的轻量版,将复杂的多智能体协作系统&a…...

NsEmuTools:5分钟搞定NS模拟器自动化管理的终极方案
NsEmuTools:5分钟搞定NS模拟器自动化管理的终极方案 【免费下载链接】ns-emu-tools 一个用于安装/更新 NS 模拟器的工具 项目地址: https://gitcode.com/gh_mirrors/ns/ns-emu-tools 你是否厌倦了手动安装和更新NS模拟器的繁琐过程?NsEmuTools作为…...

从丝杆到直线电机:半导体运动台驱动技术演进与选型指南
1. 半导体运动台驱动技术的核心挑战 在半导体制造领域,运动平台就像精密仪器的心脏,每一次跳动都关乎生产效率和产品质量。想象一下,光刻机要在指甲盖大小的芯片上绘制比头发丝还细的电路,这相当于让一台卡车在足球场上精准停到误…...

别再为答辩 PPT 秃头了!PaperXie 的 AI PPT 功能,让你把时间花在更重要的地方
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/ppt/createhttps://www.paperxie.cn/ppt/create 距离毕业论文答辩只剩半个月,你的 PPT 还停留在 “空白文档” 阶段吗? 我见过太多同学在这个阶段陷…...

Vivado里FIFO IP核的Standard和FWFT模式到底怎么选?一个波形对比就懂了
Vivado中FIFO IP核模式选择:Standard与FWFT的深度解析与实战指南 在FPGA开发中,数据缓冲是几乎所有高速数据处理系统不可或缺的一环。作为Xilinx工具链中的核心IP之一,FIFO Generator提供了灵活的数据缓冲解决方案。但当面对Standard FIFO和F…...