RK3588 点亮imx586摄像头
一.硬件原理图

mipi摄像头硬件确认点:
1.供电:5V,2.8V,1.2V,1.8V,reset脚(硬拉3.3,上电的时候从低到高),pwron脚外接
3.3V。
2,时钟:MCLKOUT是24兆时钟。
3.4组差分mipi线。mipi的data线的波形为方波。
二.驱动移植
RK提供的默认sdk里面已经将支持的所有摄像头驱动都添加到了内核,所以不需要移植该驱动了。
需确认下移植驱动对应的一些信息
源程序
kernel/drivers/media/i2c/imx586.c
kernel/drivers/media/i2c/Makefile
kernel/drivers/media/i2c/Kconfig
kernel/arch/arm64/configs/rockchip_linxu_defconfig
Makefile脚本
obj-$(CONFIG_VIDEO_IMX415) += imx586.oconfig VIDEO_IMX586tristate "Sony IMX586 sensor support"depends on I2C && VIDEO_V4L2 && VIDEO_V4L2_SUBDEV_APIdepends on MEDIA_CAMERA_SUPPORThelpThis is a Video4Linux2 sensor driver for the SonyIMX415 camera.To compile this driver as a module, choose M here: themodule will be called imx586.- 驱动对应的宏开关
CONFIG_VIDEO_IMX586=y添加设备树文件:
&i2c5 {status = "okay";pinctrl-names = "default";pinctrl-0 = <&i2c5m0_xfer>;imx586: imx586@1a {compatible = "sony,imx586";reg = <0x10>; //插摄像头看iic5上出现的新设备后填入clocks = <&cru CLK_MIPI_CAMARAOUT_M1>;clock-names = "xvclk";pinctrl-names = "default";pinctrl-0 = <&mipim0_camera3_clk>;//需要和硬件确认是复用的哪个时钟,确认可以量到波形power-domains = <&power RK3588_PD_VI>;//reset-gpios = <&gpio3 RK_PC7 GPIO_ACTIVE_HIGH>;//现在硬件上是直接拉高,所以不用配//avdd-supply = <&vcc_mipidphy0>;//供电也是直接供电,所以不用配rockchip,camera-module-index = <0>;rockchip,camera-module-facing = "back";rockchip,camera-module-name = "default";rockchip,camera-module-lens-name = "default";port {imx586_out0: endpoint {remote-endpoint = <&mipidphy0_in_ucam0>;data-lanes = <1 2 3 4>;};};};
};&csi2_dphy0 {status = "okay";ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;#address-cells = <1>;#size-cells = <0>;mipidphy0_in_ucam0: endpoint@1 {reg = <1>;remote-endpoint = <&imx586_out0>;data-lanes = <1 2 3 4>;};};port@1 {reg = <1>;#address-cells = <1>;#size-cells = <0>;csidphy0_out: endpoint@0 {reg = <0>;remote-endpoint = <&mipi2_csi2_input>;};};};
};&csi2_dphy0_hw {status = "okay";
};&mipi2_csi2 {status = "okay";ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;#address-cells = <1>;#size-cells = <0>;mipi2_csi2_input: endpoint@1 {reg = <1>;remote-endpoint = <&csidphy0_out>;};};port@1 {reg = <1>;#address-cells = <1>;#size-cells = <0>;mipi2_csi2_output: endpoint@0 {reg = <0>;remote-endpoint = <&cif_mipi2_in0>;};};};
};&rkcif {status = "okay";
};&rkcif_mipi_lvds2 {status = "okay";port {cif_mipi2_in0: endpoint {remote-endpoint = <&mipi2_csi2_output>;};};
};&rkcif_mipi_lvds2_sditf {status = "okay";port {mipi_lvds2_sditf: endpoint {remote-endpoint = <&isp0_vir0>;};};
};&rkcif_mmu {status = "okay";
};&rkisp_unite {status = "okay";
};&rkisp_unite_mmu {status = "okay";
};&rkisp0_vir0 {status = "okay";/* dual isp process image case* other rkisp hw and virtual nodes should disabled*/rockchip,hw = <&rkisp_unite>;port {#address-cells = <1>;#size-cells = <0>;isp0_vir0: endpoint@0 {reg = <0>;remote-endpoint = <&mipi_lvds2_sditf>;};};
};三.驱动调试
把驱动代码和设备树文件添加进去后就可以开始调试了。
使用i2ctool工具查看i2c5,发现有2个新的设别:0x10,0x50,猜测其中一个是senser,另一个可能是sensor的马达地址,尝试修改sensor的地址为0x10或者0x50看imx586能不能进probe函数。
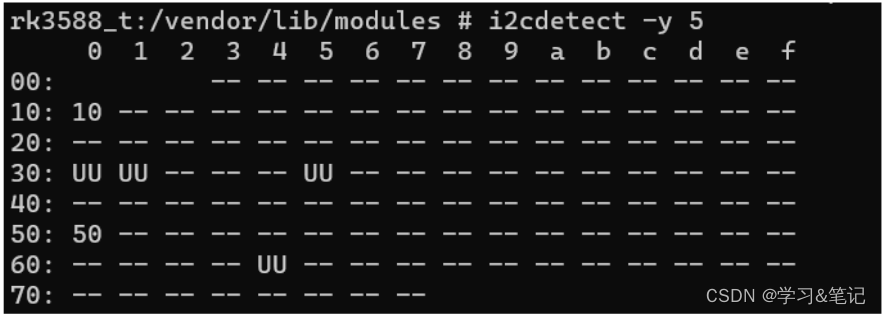
当修改imx586的地址为ox10的时候,看imx586已经进了probe函数了。

从log可以看出imx586已经进了probe函数,但是并没有识别到sensor。
这时候,需要确认mipi摄像头上的供电是否正常,时钟是否正常。
经确认是sensor的一路供电没有,供电正常后可以设别到sensor。
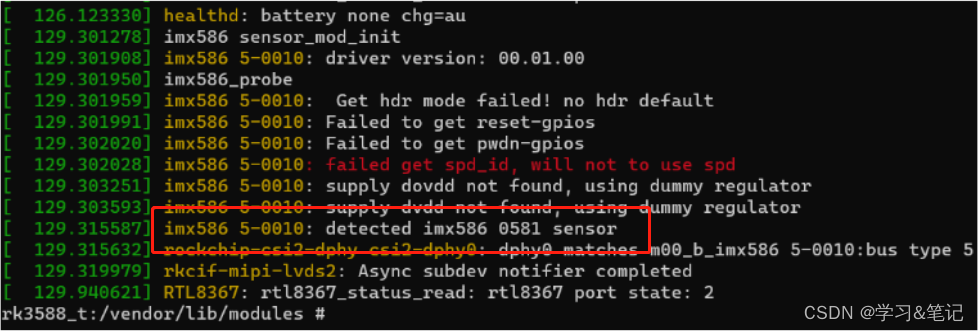
到了这一步,可以确认,iic设备已经可以设别到sensor了,并挂载在iic5上面。
四.查看拓扑
rk3588_t:/ # media-ctl -d /dev/media0 -p
Opening media device /dev/media0
Enumerating entities
Found 14 entities
Enumerating pads and links
Media controller API version 0.0.177Media device information
------------------------
driver rkcif
model rkcif-mipi-lvds2
serial
bus info
hw revision 0x0
driver version 0.0.177Device topology
- entity 1: stream_cif_mipi_id0 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video0pad0: Sink<- "rockchip-mipi-csi2":1 [ENABLED]<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 5: stream_cif_mipi_id1 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video1pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 [ENABLED]<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 9: stream_cif_mipi_id2 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video2pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 [ENABLED]<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 13: stream_cif_mipi_id3 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video3pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 [ENABLED]<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 17: rkcif_scale_ch0 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video4pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 [ENABLED]<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 21: rkcif_scale_ch1 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video5pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 [ENABLED]<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 25: rkcif_scale_ch2 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video6pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 [ENABLED]<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 29: rkcif_scale_ch3 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video7pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 [ENABLED]<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 33: rkcif_tools_id0 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video8pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 [ENABLED]<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 []- entity 37: rkcif_tools_id1 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video9pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 [ENABLED]<- "rockchip-mipi-csi2":11 []- entity 41: rkcif_tools_id2 (1 pad, 11 links)type Node subtype V4Ldevice node name /dev/video10pad0: Sink<- "rockchip-mipi-csi2":1 []<- "rockchip-mipi-csi2":2 []<- "rockchip-mipi-csi2":3 []<- "rockchip-mipi-csi2":4 []<- "rockchip-mipi-csi2":5 []<- "rockchip-mipi-csi2":6 []<- "rockchip-mipi-csi2":7 []<- "rockchip-mipi-csi2":8 []<- "rockchip-mipi-csi2":9 []<- "rockchip-mipi-csi2":10 []<- "rockchip-mipi-csi2":11 [ENABLED]- entity 45: rockchip-mipi-csi2 (12 pads, 122 links)type V4L2 subdev subtype Unknowndevice node name /dev/v4l-subdev0pad0: Sink[fmt:SRGGB10/4000x3000crop.bounds:(0,0)/4000x3000crop:(0,0)/4000x3000]<- "rockchip-csi2-dphy0":1 [ENABLED]pad1: Source-> "stream_cif_mipi_id0":0 [ENABLED]-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad2: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 [ENABLED]-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad3: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 [ENABLED]-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad4: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 [ENABLED]-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad5: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 [ENABLED]-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad6: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 [ENABLED]-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad7: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 [ENABLED]-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad8: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 [ENABLED]-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad9: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 [ENABLED]-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 []pad10: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 [ENABLED]-> "rkcif_tools_id2":0 []pad11: Source-> "stream_cif_mipi_id0":0 []-> "stream_cif_mipi_id1":0 []-> "stream_cif_mipi_id2":0 []-> "stream_cif_mipi_id3":0 []-> "rkcif_scale_ch0":0 []-> "rkcif_scale_ch1":0 []-> "rkcif_scale_ch2":0 []-> "rkcif_scale_ch3":0 []-> "rkcif_tools_id0":0 []-> "rkcif_tools_id1":0 []-> "rkcif_tools_id2":0 [ENABLED]- entity 58: rockchip-csi2-dphy0 (2 pads, 2 links)type V4L2 subdev subtype Unknowndevice node name /dev/v4l-subdev1pad0: Sink[fmt:SRGGB10/4000x3000]<- "m00_b_imx586 5-0010":0 [ENABLED]pad1: Source-> "rockchip-mipi-csi2":0 [ENABLED]- entity 63: m00_b_imx586 5-0010 (1 pad, 1 link)type V4L2 subdev subtype Sensordevice node name /dev/v4l-subdev2pad0: Source[fmt:SRGGB10/4000x3000]-> "rockchip-csi2-dphy0":0 [ENABLED]m00_b_imx586 5-0010 (1 pad, 1 link):表示imx586实在mipi0上,挂载在iic5,。
fmt:SRGGB10/4000x3000 表示格式为GB10,分辨率为4000*3000.
拓扑通路为:
m00_b_imx586 -> rockchip-csi2-dphy0 -> rockchip-mipi-csi2 -> stream_cif_mipi_id0 -> video0
五.抓取图像
命令:
v4l2-ctl -d /dev/video0 --set-fmt-video=width=1920,height=1080,pixelformat=BG10 \--stream-mmap=3 \--stream-skip=3 \--stream-to=/tmp/cif888.out \--stream-count=1 \--stream-poll
[ 370.297011] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297022] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297033] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297043] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297054] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297065] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297075] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297086] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297097] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297108] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297119] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297130] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297141] mipi2-csi2 ERR1:0x10000000 (ecc2)
[ 370.297154] mipi2-csi2 ERR1:0x10000000 (ecc2)发现一直报mipi2-csi2 ERR。
原因:一般报这种错误为物理层解析不到mipi协议。
排查:可能mipi4组差分线出现虚焊假焊,可能mipi插线没有整理好,也可能mipi波形不对。
mipi data波形:为方波

相关文章:
RK3588 点亮imx586摄像头
一.硬件原理图 mipi摄像头硬件确认点: 1.供电:5V,2.8V,1.2V,1.8V,reset脚(硬拉3.3,上电的时候从低到高),pwron脚外接 3.3V。 2,时钟:MCLKOUT是2…...
C++---继承
继承 前言继承的概念及定义继承的概念继承定义继承关系和访问限定符 基类和派生类对象赋值转换继承中的作用域派生类的默认成员函数继承与友元继承与静态成员**多重继承**多继承下的类作用域菱形继承虚继承使用虚基类 支持向基类的常规类型转换 前言 在需要写Father类和Mother…...

使用新版Maven-mvnd快速构建项目
目前我们项目的构建方式多数是 maven、gradle,但是 maven 相对 gradle 来说,构建速度较慢,特别是模块相对较多的时候,构建速度更加明显。但是我们将项目由 maven 替换为 gradle 相对来说会比较麻烦,成本较高。于是我们…...
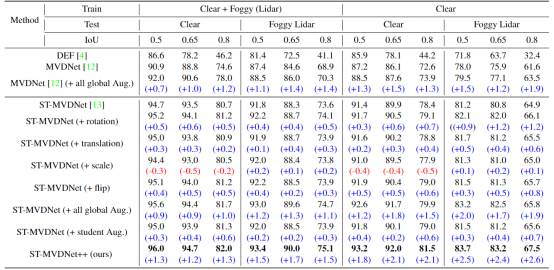
【ICASSP 2023】ST-MVDNET++论文阅读分析与总结
主要是数据增强的提点方式。并不能带来idea启发,但对模型性能有帮助 Challenge: 少有作品应用一些全局数据增强,利用ST-MVDNet自训练的师生框架,集成了更常见的数据增强,如全局旋转、平移、缩放和翻转。 Contributi…...
MySQL 面试题——MySQL 基础
目录 1.什么是 MySQL?有什么优点?2.MySQL 中的 DDL 与 DML 是分别指什么?3.✨数据类型 varchar 与 char 有什么区别?4.数据类型 BLOB 与 TEXT 有什么区别?5.DATETIME 和 TIMESTAMP 的异同?6.✨MySQL 中 IN …...
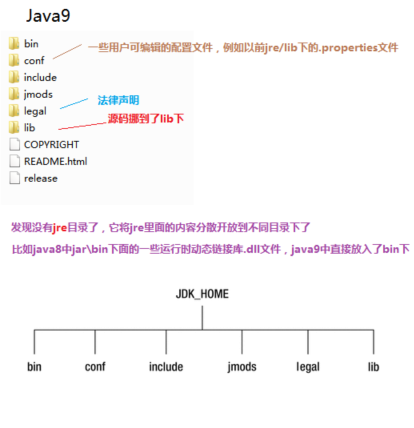
JDK9特性——概述
文章目录 引言JDK9特性概述JDK9的改变JDK和JRE目录变化总结 引言 JAVA8 及之前,版本都是特性驱动的版本更新,有重大的特性产生,然后进行更新。 JAVA9开始,JDK开始以时间为驱动进行更新,以半年为周期,到时…...

征战开发板从无到有(三)
接上一篇,翘首已盼的PCB板子做好了,管脚约束信息都在PCB板上体现出来了,很满意,会不会成为爆款呢,嘿嘿,来,先看看PCB裸板美图 由于征战开发板电路功能兼容小梅哥ACX720,大家可以直…...
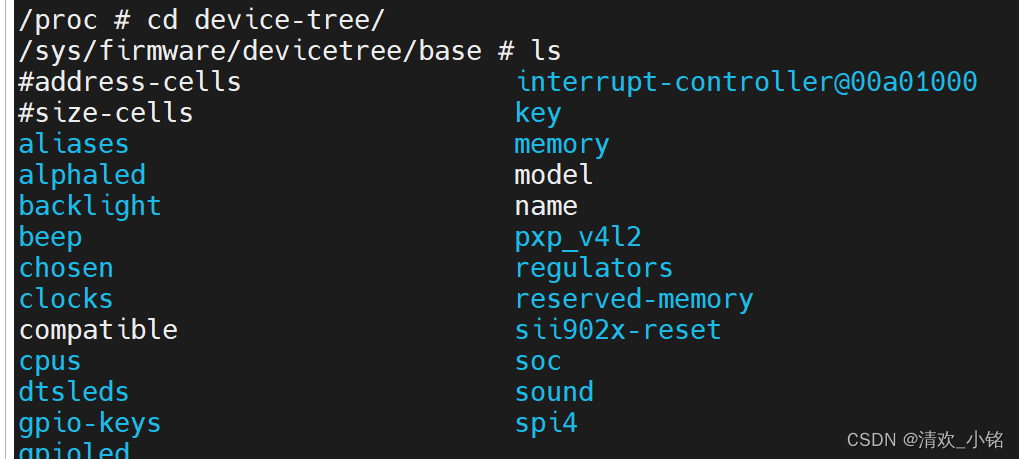
Linux设备树详细学习笔记
参考文献 参考视频 开发板及程序 原子mini 设备树官方文档 设备树的基本概念 DT:Device Tree //设备树 FDT: Flattened Device Tree //开放设备树,起源于OpenFirmware (所以后续会见到很多OF开头函数) dts: device tree source的缩写 //设备树源码 dtsi: device …...
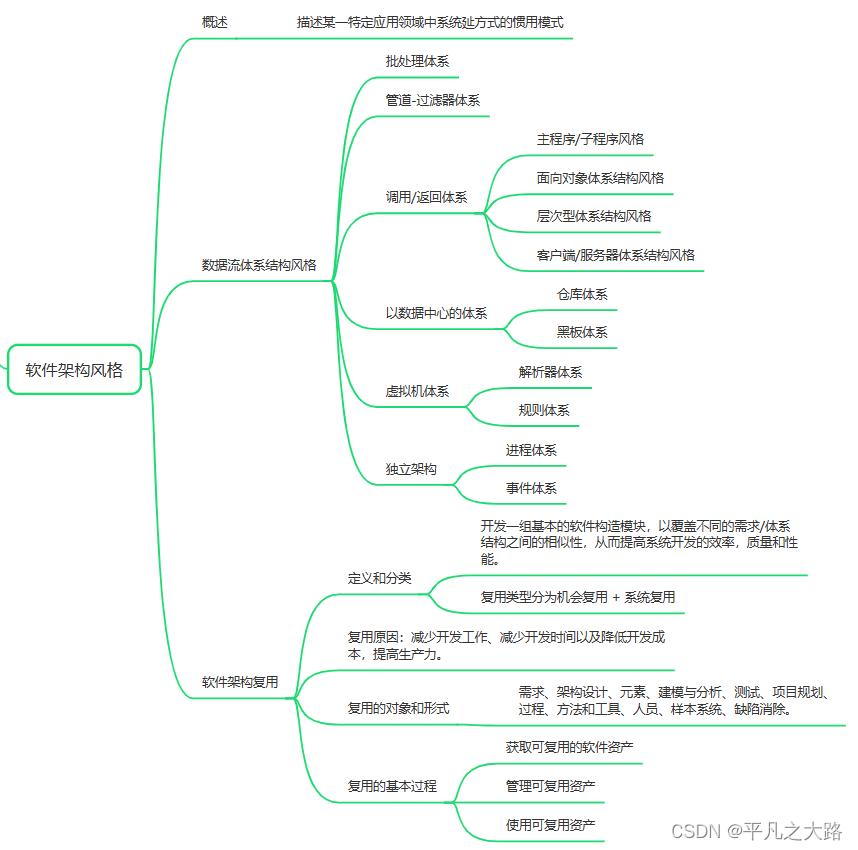
【系统架构】系统架构设计基础知识
导读:本文整理关于系统架构设计基础知识来构建系统架构知识体系。完整和扎实的系统架构知识体系是作为架构设计的理论支撑,基于大量项目实践经验基础上,不断加深理论体系的理解,从而能够创造新解决系统相关问题。 目录 1、软件架…...
快递、外卖、网购自动定位及模糊检索收/发件地址功能实现
概述 目前快递、外卖、团购、网购等行业 :为了简化用户在收发件地址填写时的体验感,使用辅助定位及模糊地址检索来丰富用户的体验 本次demo分享给大家;让大家理解辅助定位及模糊地址检索的功能实现过程,以及开发出自己理想的作品…...

Springboot后端导入导出excel表
一、依赖添加 操作手册:Hutool — 🍬A set of tools that keep Java sweet. <!--hutool工具包--><dependency><groupId>cn.hutool</groupId><artifactId>hutool-all</artifactId><version>5.7.20</versio…...
通过stream流实现分页、模糊搜索、按列过滤功能
通过stream实现分页、模糊搜索、按列过滤功能 背景逻辑展示示例代码 背景 在有一些数据通过数据库查询出来后,需要经过一定的逻辑处理才进行前端展示,这时候需要在程序中进行相应的分页、模糊搜索、按列过滤了。这些功能通过普通的逻辑处理可能较为繁琐…...

webpack:系统的了解webpack一些核心概念
文章目录 webpack 如何处理应用程序?何为webpack模块chunk?入口(entry)输出(output)loader开发loader 插件(plugin)简介流程插件开发:Tapable类监听(watching)compiler 钩子compilation 钩子compiler和compilation创建自定义 插件 loader和pl…...

Unreal Engine Loop 流程
引擎LOOP 虚幻引擎的启动是怎么一个过程。 之前在分析热更新和加载流程过程中,做了一个图。记录一下!! 
FLASK中的鉴权的插件Flask-HTTPAuth
在 Web 应用中,我们经常需要保护我们的 api,以避免非法访问。比如,只允许登录成功的用户发表评论等。Flask-HTTPAuth 扩展可以很好地对 HTTP 的请求进行认证,不依赖于 Cookie 和 Session。本文主要介绍两种认证的方式:…...
linux万字图文学习进程信号
1. 信号概念 信号是进程之间事件异步通知的一种方式,属于软中断。 1.1 linux中我们常用Ctrlc来杀死一个前台进程 1. Ctrl-C 产生的信号只能发给前台进程。一个命令后面加个&可以放到后台运行,这样Shell不必等待进程结束就可以接受新的命令,启动新的进程。2. S…...
DataX实现Mysql与ElasticSearch(ES)数据同步
文章目录 一、Linux环境要求二、准备工作2.1 Linux安装jdk2.2 linux安装python2.3 下载DataX: 三、DataX压缩包导入,解压缩四、编写同步Job五、执行Job六、定时更新6.1 创建定时任务6.2 提交定时任务6.3 查看定时任务 七、增量更新思路 一、Linux环境要求…...
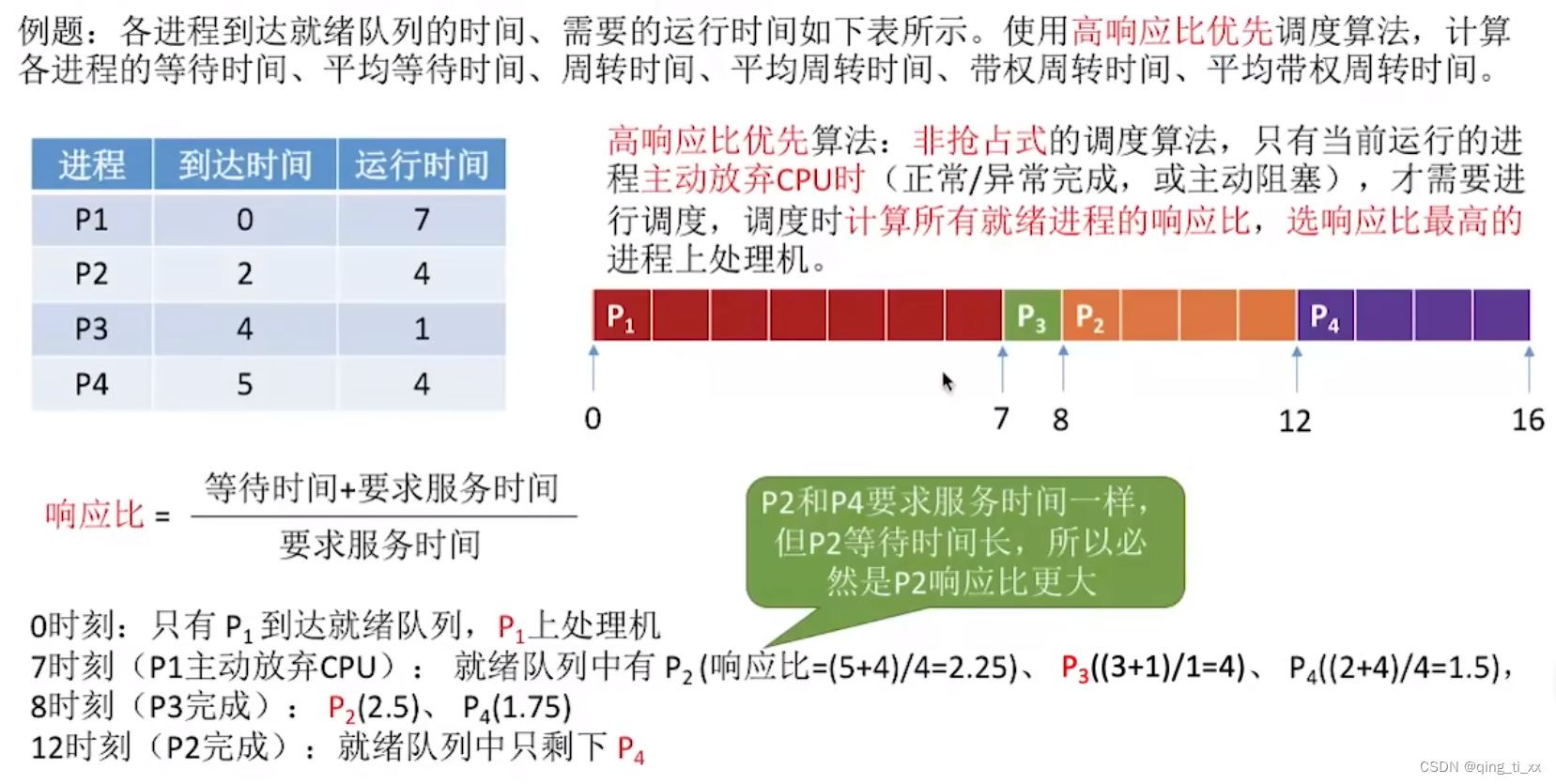
第二章 进程与线程 十、调度算法1(先来先服务、短作业优先、最高响应比优先)
目录 一、先来先服务算法 1、算法思想 2、算法规则 3、用于作业/进程调度 4、是否可抢占? 5、优缺点 优点: 缺点: 6、是否会导致饥饿 7、例子 二、短作业优先算法 1、算法思想 2、算法规则 3、用于作业/进程调度 4、是否可抢占? 5、优缺…...
windows平台 git bash使用
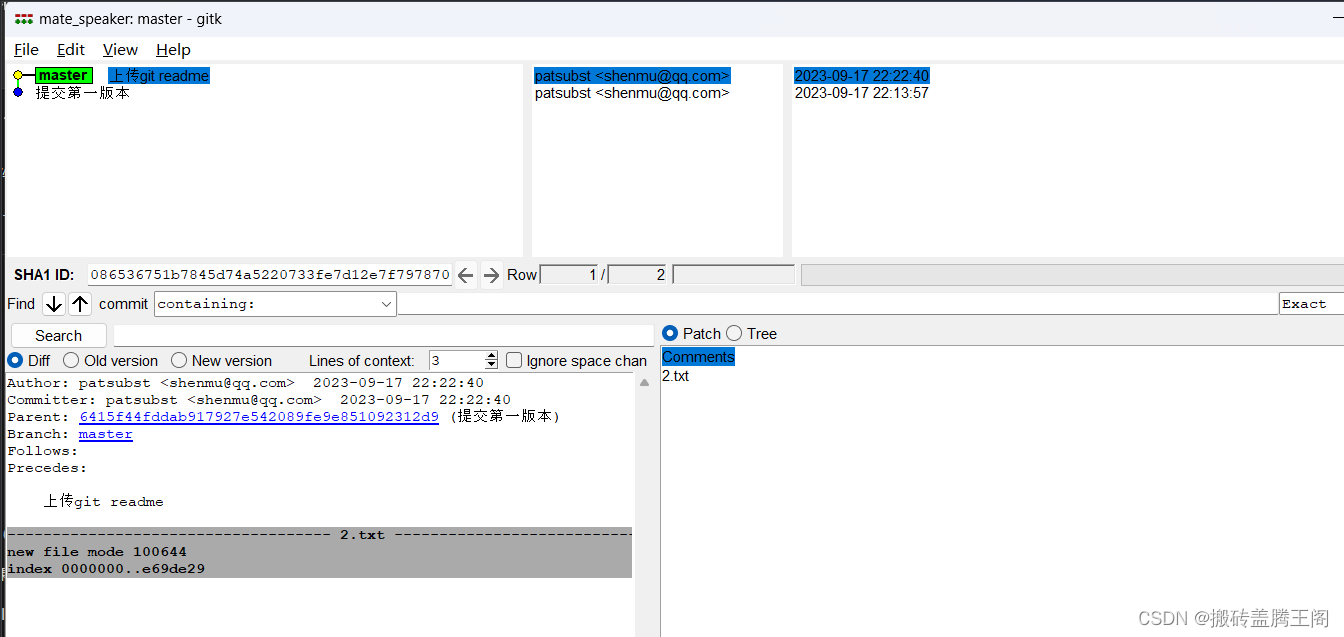
打开所在需要git管理的目录,鼠标右键open Git BASH here 这样就直接进来,不需要windows dos窗口下麻烦的切路径,windows和linux 路径方向不一致 (\ /) 然后git init 建立本地仓库,接下来就是git相关的操作了. 图形化界面查看 打开所在需要git管理的目录,鼠标右键…...
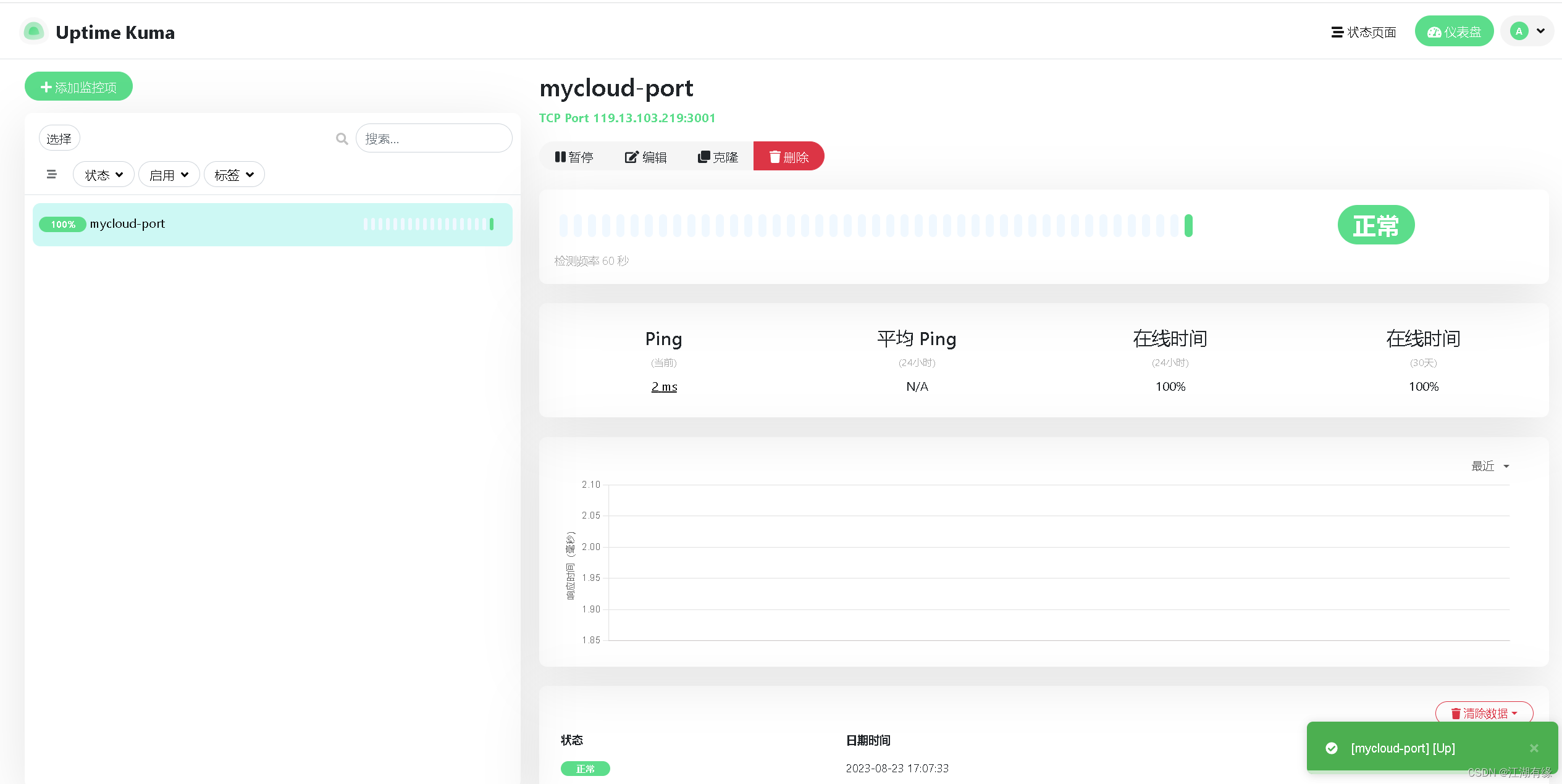
Linux系统之安装uptime-kuma服务器监控面板
Linux系统之安装uptime-kuma服务器监控面板 一、uptime-kuma介绍1.1 uptime-kuma简介1.2 uptime-kuma特点 二、本次实践环境介绍2.1 环境规划2.2 本次实践介绍2.3 环境要求 三、检查本地环境3.1 检查本地操作系统版本3.2 检查系统内核版本3.3 检查系统是否安装Node.js 四、部署…...
:揭秘那个让虚拟世界“有重量感“的阴影魔法)
环境光遮蔽(Ambient Occlusion):揭秘那个让虚拟世界“有重量感“的阴影魔法
一、一个让我"开窍"的老木匠故事 我有个朋友是传统家具的修复师,他给我讲过一个让我至今难忘的故事。他说他刚入行时跟着一位 70 多岁的老木匠师父学习——师父让他做的第一件事不是雕花、不是榫卯——而是"看阴影"——这个看似奇怪的训练改变了…...

别再死记硬背SMO公式了!用Python手写一个SVM分类器,带你一步步拆解SMO核心逻辑
用Python手写SVM分类器:代码驱动理解SMO算法核心在机器学习领域,支持向量机(SVM)以其优秀的分类性能和坚实的数学基础著称。然而,许多学习者在理解其核心算法——序列最小优化(SMO)时,往往被复杂的数学推导所困扰。本文将采用一种…...

别再盲跑了!手把手教你用Arduino Zero在IDE 2.0里设置断点单步调试
告别盲跑时代:Arduino Zero与IDE 2.0的源码级调试实战指南 当你的Arduino项目逻辑越来越复杂,仅靠串口打印调试就像在迷宫里摸黑前行——直到遇见Arduino Zero与IDE 2.0的调试组合。本文将揭示如何用这套工具实现 源码级精准调试 ,即使你手…...

浏览器 Profile 环境排查:Cookie、LocalStorage、网络出口与自动化任务配置清单
一、为什么浏览器环境经常“今天能用,明天失效”很多团队遇到登录状态丢失、页面配置异常、自动化任务失败时,会先怀疑网络、脚本或系统本身。但在实际项目里,问题经常不是单点故障,而是浏览器环境缺少稳定管理:对象常…...

如何进行TVA仿真引擎的“光照地狱”训练?
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

rk35xx 通过recovery升级问题
Firefly 的 recovery 库是一个核心组件,它构建了一个独立的微型 Linux 系统,专门用于在设备主系统之外执行高可靠性的固件升级。简单来说,它的工作流程是:主系统通过命令触发,将升级指令写入特定分区并重启;…...

MySQL GROUP BY 原理与优化
我刚工作的时候,有次统计每个用户的订单总金额,写了 SELECT user_id, SUM(amount) FROM orders GROUP BY user_id,结果执行了 60 秒还没出结果。DBA 帮我一看执行计划,发现没走索引,导致 Using temporary(用…...

腾讯 Marvis 初级使用教程——从安装到上手
腾讯最新系统级AI助手Marvis(2026年5月20日发布),官网 https://marvis.qq.com,主打“一句话操作电脑”、跨端协同、GUI Agent执行。虽然是个【小龙虾】,但上手其实不难。这篇就简单写写 Marvis 的安装和基础使用&#…...

2026长沙智能家居品牌实测,这些本地老牌值得选
2026年,长沙的智能家居市场已经从“概念热”转向“落地战”。我走访了长沙多个本地服务商,实测了不同品牌在别墅、酒店、大平层等场景的真实表现。今天,结合数据与案例,分享几个值得关注的本地品牌,尤其是深耕8年以上的…...

破解材料数据荒:合成数据与随机森林预测聚合物阻燃性能
1. 项目概述与核心挑战在材料研发领域,尤其是涉及公共安全的聚合物阻燃性研究,传统实验方法正面临巨大瓶颈。想象一下,你是一位材料工程师,需要设计一种用于高铁内饰或高层建筑电缆护套的新型聚合物,其阻燃性能必须满足…...